PERANCANGAN PENGENDALI FUZZY PADA SISTEM EVAPORATOR INDUSTRI
B. Wuri Harini*
ABSTRAK
PERANCANGAN PENGENDALI FUZZY PADA SISTEM EVAPORATOR INDUSTRI.
Evaporasi merupakan proses mengentalkan cairan dengan memberikan panas pada cairan tersebut menggunakan energi yang intensif yaitu sejumlah uap sebagai sumber panas. Jumlah uap yang dihasilkan per unit uap yang dipakai dapat diefektifkan dengan penggunaan evaporator bertingkat (multiple effect evaporator). Kam dan Tade [1] telah membuat model untuk sistem evaporator lima tingkat pada proses pembakaran cairan dalam proses Bayer untuk produksi alumina di Alcoa’s Wagerup alumina refinery. Dalam proses kerjanya, sistem evaporator memerlukan tinggi cairan dalam tangki yang tepat untuk memperoleh densitas produk yang diinginkan. Untuk mempertahankan kondisi operasional evaporator tersebut dibutuhkan suatu sistem kendali yang baik. Dalam tulisan ini akan dirancang sistem kendali dengan menggunakan logika fuzzy. Perancangan dan simulasi sistem kendali fuzzy tersebut dilakukan dengan menggunakan perangkat lunak MATLAB versi 7.0. Hasil yang dicapai akan dibandingkan dengan hasil yang diperoleh pada sistem kendali Proportional Integral (PI).
Kata-kata kunci: Evaporator, Pengendali Logika Fuzzy, Pengendali PI
ABSTRACT
FUZZY CONTROLLER DESIGN IN INDUSTRY EVAPORATOR SYSTEM. Evaporation
is a process by which a solution is concentrated by removing the volatile liquid from a non-volatile solute by means of heat transfer from heat source (steam) to the solution. The amount of vapour produced per unit consumption of steam can be adjusted by cascading the evaporator stages. Kam and Tade have presented models of a five-effect evaporator system in the liquor burning process associated with the Bayer process for alumina production at the Alcoa’s Wagerup alumina refinery. To get the product with good density as we need, evaporator system needs a good controller system. In this paper, we design a controller system using fuzzy logic. The design and simulation the fuzzy controller is done with MATLAB version 7 software. The result will be compared with Proportional Integral controler output. Keywords: Evaporator, Fuzzy Logic Controller, pengendali PI
PENDAHULUAN
Proses evaporasi telah dikenal sejak dahulu, yaitu untuk membuat garam dengan cara menguapkan air dengan bantuan energi matahari dan angin. Evaporasi merupakan satu unit operasi yang penting dan biasa dipakai dalam industri kimia dan mineral. Evaporasi merupakan salah satu teknologi yang digunakan untuk mengolah limbah radioaktif yang ditimbulkan dari kegiatan pengoperasian reaktor riset, pemanfaatan sumber radiasi dan bahan radioaktif dalam bidang industri, pertanian, kedokteran dan penelitian serta dari berbagai proses industri yang menggunakan bahan yang mengandung radionuklida alam.
Dalam sistem evaporasi cairan dipekatkan dengan memberikan panas pada cairan tersebut dengan energi yang intensif berupa sejumlah uap sebagai sumber panas. Jumlah uap yang dihasilkan per unit uap yang dipakai yang menunjukkan peningkatan kepekatan dapat diefektifkan dengan penggunaan evaporator bertingkat. Keuntungan evaporator bertingkat ini adalah uap hasil satu tingkat dapat digunakan sebagai sumber energi tingkat selanjutnya. Dengan demikian proses evaporasi dengan evaporator bertingkat ini dapat menghemat energi yang diperlukan, sehingga mengurangi biaya operasi.
Beberapa model mekanik sistem evaporator industri telah dibuat oleh para peneliti dalam dekade ini. Kam dan Tade [1] telah membuat model untuk sistem evaporator industri lima tingkat pada proses pembakaran cairan dalam proses Bayer untuk produksi alumina di Alcoa’s Wagerup alumina refinery.
Dalam proses kerjanya sistem evaporator memerlukan tinggi cairan dalam tangki yang tepat untuk memperoleh densitas produk yang diinginkan. Untuk mempertahankan kondisi operasional evaporator tersebut dibutuhkan suatu sistem kendali yang mampu mengatur sistem tersebut. Beberapa ilmuwan [2], [3], [4] telah merancang sistem kendali yang berbeda untuk sistem evaporator ini. Dalam penelitian ini akan dirancang sistem kendali dengan menggunakan logika fuzzy dengan mempertimbangkan pengaruh interaksi yang ada dalam sistem MIMO.
PROSES EVAPORATOR INDUSTRI
Sistem Evaporator
Evaporator yang digunakan dalam tulisan ini merupakan bagian dari proses Bayer untuk produksi aluminium. Evaporasi bertingkat dengan konfigurasi
counter-current dari proses pembakaran cairan terdiri dari lima tingkat yaitu satu falling film
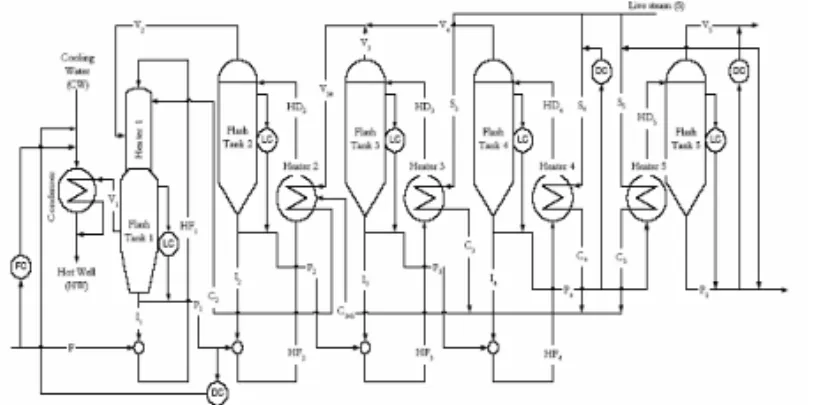
evaporator yang dipasang secara seri. Komponen-komponen utama di setiap tingkat adalah flash tank (FT), flash pot dan heater (HT). Skema sistem evaporator disederhanakan ditunjukkan dalam gambar 2.1.
Spent liquor setelah proses pengendapan (precipitation) dimasukkan ke falling
film stage (FT #1). Komponen yang mudah menguap, dalam hal ini air, dihilangkan
dengan laju recycle tinggi dan hasilnya dikentalkan lagi melalui tiga tingkat selanjutnya (FT #2 sampai #4). FT #5 digunakan untuk menghilangkan sisa cairan tanpa proses ulang.
Di setiap tingkat, spent liquor dipanaskan melalui heat exchanger (heater) dan air dihilangkan berupa uap pada tekanan lebih rendah dalam flash tank. Live steam
digunakan sebagai pemanas untuk HT #3, #4 dan #5. Uap dari FT #3 dan #4 digabung dan digunakan dalam HT #2, sedangkan uap dari FT #2 digunakan dalam HT #1. Kondensasi uap dari semua heater dikumpulkan dalam flash pot. Live steam ke HT #3 diset sebanding dengan jumlah live steam yang masuk ke HT #4, sedangkan jumlah
live steam ke HT #5 tergantung pada jumlah residual “flashing” yang dihilangkan. Air
dingin yang mengalir ke kondenser C diset sehingga semua sisa uap terkondensasi. Sistem evaporator penting dalam pabrik aluminium dan sulit untuk dikendalikan dengan menggunakan kontroler klasik karena karakteristiknya yang kompleks yaitu nonlinieritas sistem.
Gambar 2.1. Skema sistem evaporator disederhanakan
Ada 15 variabel keadaan yang menjadi perhatian, yaitu level cairan dalam flash tank (hiii, i = 1,2,..5), densitas cairan (ρi, i = 1,2,... 5) dan suhu aliran produk meninggalkan setiap tingkat (T i, i = 1,2,... 5). Keluaran terkendali (controlled
variabel) dari plant adalah level cairan dalam semua flash tank (hiii, i = 1,2,..5), densitas cairan produk pada tingkat #4 (ρ4) dan suhu pada tingkat #5 (T5). Input yang dimanipulasi adalah aliran produk cairan (Qpp ipii, i = 1,2,..5), laju uap ke HT #4 (
m
D
s4),Model Sistem Evaporator
Model sistem evaporator diperoleh dengan menggunakan kesetimbangan massa dan energi. Model sistem evaporator merupakan model yang non linier.
Dalam pemodelan ini hanya keempat tingkat pertama dari sistem evaporator yang digunakan untuk menghindari kompleksitas. Model terdiri dari 12 persamaan diferensial dengan 5 variabel input dan 5 variabel output. Keadaan (state), variabel input dan output ditunjukkan dalam tabel 2.1 dengan: hi dalam m, Ti dalam 0C, ρi dalam ton/m3, Qpp ipii dalam m3/jam dan
m
D
s4 dalam ton/jam. Sebagai catatan, nilai aktualvariabel –variabel ini dikalikan dengan suatu faktor dan nilai variabel keadaan hanya merupakan nilai perkiraan.
Persamaan model sistem evaporator flash tank 2 adalah sebagai berikut (1), (2):
1 1 1 1 1 2 2 1 2 2 2 2 0 2 1 2 1 1 2 2 2 2 2 2 2 1 2 2 − − + − = − − − = − − = E Q Q m E T C dt dT Q E A h dt d E Q Q A dt dh w P P V V P w w P P ρ ρ ρ ρ ρ ρ ρ ρ ρ D dengan
(
)
(
) (
) (
)
1 . 273 1 . 273 58 . 1 77 . 105 58 . 1 1 . 273 2 2 2 2 2 2 2 2 2 0 2 2 2 2 2 2 2 2 4 3 2 2 2 2 2 2 2 2 1 1 1 1 2 − + − − + − = − = − + = = + = + − = BPE T BPE T R M h A V T C T P BPE T R MP E m m m m m T c Q T c Q E V V V V V S V S S P P ρ ρ λ λ ρ ρ D D D D DLaju evaporasi E2 dalam persamaan (2.4) tergantung pada jumlah uap yang
terkondensasi dalam HT#2 yang besarnya sama dengan jumlah uap dari FT#3 dan FT#4 (persamaan 2.5). Jumlah uap yang meninggalkan FT#2 (
m
D
v2) sama dengan jumlah vaporisasi air dalam FT#2 (E2). Persamaan matematik untuk flash tank 1, 3(2.1) (2.2) (2.3) (2.4) (2.5) (2.6) (2.7) (2.8) (2.9)
dan 4 dapat dilihat dalam appendiks. Nilai-nilai konstanta dalam model evaporator ditunjukkan dalam tabel 2.2.
Tabel 2.1. Variabel state, input dan output
State Input (u) dan
Output (y) x1 h1 1.5 u1 QP1 32.736 x2 h2 2.25 u2 QP2 27.713 x3 h3 2.25 u3 QP3 23.850 x4 h4 2.25 u4 QP4 21.642 x5 ρ4 1.54 u5
m
D
s4 2.3814 x6 T1 66.0 x7 T2 90.6 y1 h1 1.5 x8 T3 129 y2 h2 2.25 x9 T4 135 y3 h3 2.25 x10 ρ1 1.357 y4 h4 2.25 x11 ρ2 1.422 y5 ρ4 1.54 x12 ρ3 1.49Tabel 2.2. Nilai konstanta pada model evaporator
Kuantitas Nilai Kuantitas Nilai
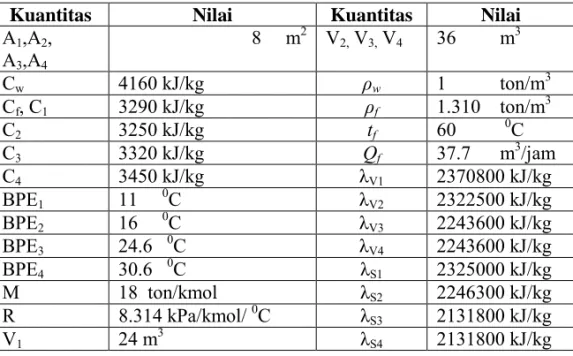
A1,A2, A3,A4 8 m2 V 2, V3, V4 36 m3 Cw 4160 kJ/kg ρw 1 ton/m3 Cf, C1 3290 kJ/kg ρf 1.310 ton/m3 C2 3250 kJ/kg tf 60 0C C3 3320 kJ/kg Qf 37.7 m3/jam C4 3450 kJ/kg λV1 2370800 kJ/kg BPE1 11 0C λV2 2322500 kJ/kg BPE2 16 0C λV3 2243600 kJ/kg BPE3 24.6 0C λV4 2243600 kJ/kg BPE4 30.6 0C λS1 2325000 kJ/kg M 18 ton/kmol λS2 2246300 kJ/kg R 8.314 kPa/kmol/ 0C λ S3 2131800 kJ/kg V1 24 m3 λS4 2131800 kJ/kg
PERANCANGAN DECOUPLER
Linierisasi
Model linier dari sistem evaporator non linier dalam bab 2 dapat diperoleh dengan linierisasi lokal di sekitar titik operasi steady state seperti yang ditunjukkan dalam tabel 2.1. Model linier dinyatakan dalam bentuk state space sebagai berikut:
Cx
y
d
Bu
Ax
x
=
Γ
+
+
=
• (3.1)dengan state x = [h1, h2, h3, h4, ρ4, T1, T2, T3, T4, ρ 1, ρ 2, ρ 3]T, input u = [QP1, QP2,
QP3, QP4, mS4
•
]T dan disturbance d = [Q
f, ρf, Tf]T. Output y yang akan dikendalikan adalah [h1, h2, h3, h4, ρ4]T. Vektor state, input dan output dinyatakan
dalam bentuk deviasi dari kondisi steady state Matriks A, B dan Г merupakan matriks Jacobian untuk variabel state, input dan disturbance yang diperoleh dari linierisasi lokal model evaporator non linier. Dari hasil linierisasi di atas diperoleh nilai eigen (λk) sebesar: -2.535577651±0.3392069476i, -0.9979157112±0.67223i,
0.1118535155±0.023266263i, -0.00737602591±0.067703230i, -0.004773518139± 0.0004633332204i, -0.004210084218, -0.0003709942977.
Beberapa nilai eigen sistem evaporator bernilai positif. Hal ini menunjukkan bahwa model evaporator mempunyai sifat open loop unstable.
Tanggapan Open-loop
Dalam gambar 3.1 ditunjukkan simulasi tanggapan open-loop sistem evaporator linier dan non-linier dengan masukan aliran uap ke heater #4 (mS4
•
) ditingkatkan sebesar 20%. Dalam gambar tersebut tampak bahwa model linier untuk h1, h2, h3, h4, ρ4 mendekati proses nonlinier, dengan penguatan model
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4 1.5 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 1.6 1.7 1.8 1.9 2 2.1 2.2 2.3 2.4 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 1.6 1.7 1.8 1.9 2 2.1 2.2 2.3 2.4 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 2.05 2.1 2.15 2.2 2.25 2.3 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 1.54 1.55 1.56 1.57 1.58 1.59 1.6 1.61 1.62 : nonlininer : linier
Gambar 3.1. Simulasi tanggapan open-loop sistem evaporator linier dan non-linier Tinggi cairan tingkat 1 (m) Tinggi cairan tingkat 2 (m)
Tinggi cairan tingkat 3 (m) Tinggi cairan tingkat 4 (m)
Densitas cairan tingkat 4 (ton/m3)
t (jam) t (jam)
t (jam) t (jam)
Tanggapan Close-loop
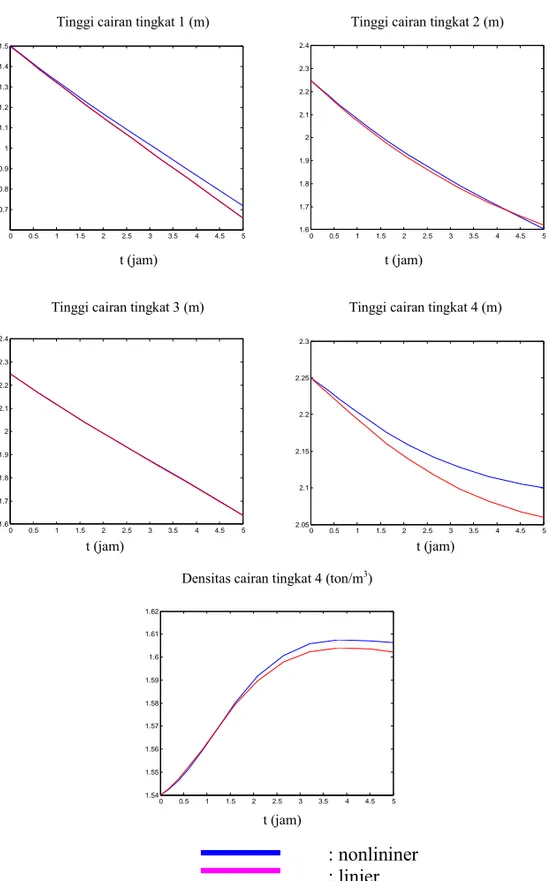
Dalam gambar 3.2 ditunjukkan simulasi tanggapan close-loop model evaporator linier untuk masing pasangan seperti yang ditunjukkan dalam tabel 3.1. Parameter yang digunakan diambil dari referensi [2], hanya untuk tujuan stabilisasi dan bukan untuk tujuan optimasi. Dari simulasi tersebut ditunjukkan bahwa sistem mempunyai sifat closed-loop stable.
Tabel 3.1 Parameter pengendali PI
Variabel Output Manipulated Variable Kp Ti
h1 QP1 -10 20 h2 QP2 -10 20 h3 QP3 -10 20 h4 QP4 -10 20 ρ4 Rho4 0.6 3 0 20 40 60 80 100 120 140 160 180 200 1.1 1.15 1.2 1.25 1.3 1.35 1.4 1.45 1.5 1.55 0 20 40 60 80 100 120 140 160 180 200 2.16 2.18 2.2 2.22 2.24 2.26 2.28 2.3 0 20 40 60 80 100 120 140 160 180 200 2.15 2.2 2.25 2.3 2.35 2.4 2.45 2.5 2.55 2.6 2.65 0 20 40 60 80 100 120 140 160 180 200 2.1 2.15 2.2 2.25 2.3 2.35 2.4 2.45 2.5 2.55 2.6 0 20 40 60 80 100 120 140 160 180 200 1.25 1.3 1.35 1.4 1.45 1.5 1.55 1.6
Gambar 3.2. Simulasi tanggapan close-loop sistem evaporator linier Tinggi cairan tingkat 1 (m) Tinggi cairan tingkat 2 (m)
Tinggi cairan tingkat 3 (m) Tinggi cairan tingkat 4 (m)
Densitas cairan tingkat 4 (ton/m3)
t (jam) t (jam)
t (jam) t (jam)
Perancangan Decoupler
Dalam proses Multi Input Multi Output (MIMO), masing-masing input mempunyai interaksi dengan masing-masing output. Untuk mengurangi interaksi antar loop, maka dirancang suatu decoupler.
Jika suatu proses (plant) dengan n variabel terkontrol dan n variabel termanipulasi dipasang suatu decoupler, maka hubungan antara variabel terkontrol
C(s) dan output kontroler M(s) dapat ditulis dalam bentuk matriks:
( )
( )
( )
( )
( )
( )
( )
( )
( )
• • • • • • • • • • • • • • • • • • = • • • s M s M s M s N s N s N s C s C s C n n n 2 1 2 1 2 1 0 0 0 0 0 0 (3.2)dengan
N
1( ) ( )
s
,
N
2s
,...,
N
n( )
s
merupakan fungsi yang diinginkan, yaitu matriks identitas (I), dengan ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • = • • • • • • • • • • • • • • • s D s D s D s D s D s D s G s G s G s G s G s G s N s N s N nn n n n Pnn Pn n P P n P P n 1 2 21 1 11 1 2 21 1 11 2 1 0 0 0 0 0 0 (3.3) atau, I D G N = P⋅ = (3.4)dengan GP merupakan steady state gain matrix dan D merupakan matriks
decoupler. Jika kedua ruas dikalikan dengan GP−1 maka diperoleh matriks
decoupler :
1
− =GP
Steady state gain matrix GP dapat dihitung dari model state space proses dinamik yang dilinearisasi [8]. Model non linier dapat dilinierkan di sekitar titik operasi steady state membentuk persamaan state space dengan A, B, C, D merupakan matriks konstan. Dengan transformasi Laplace diperoleh fungsi alih antara y dan u sebagai berikut:
( )
( )
s
C
(
sI
A
)
B
D
u
s
y
=
−
−1+
(3.6)Steady state gain matrix antara y dan u dapat diperoleh dengan memberi nilai
s=0, sehingga diperoleh:
( )
CA
B
D
G
0
=
−
−1+
(3.7)Matriks G(0) dan matriks decoupler, yang merupakan invers dari G(0), dapat dilihat pada apendiks.
PERANCANGAN PENGENDALI FUZZY
Bentuk logika fuzzy dasar adalah arsitektur Mamdani, di mana pengendali secara langsung mengubah spesifikasi kinerja eksternal dan sifat plant ke dalam bahasa berbasis aturan (rule). Paradigma dasar kendali logika fuzzy Mamdani yang berbasis aturan memetakan controlled variable (CV1, CV2, ...) dari plant dengan
manipulated variable (MV1, MV2, ...). Dalam setiap CV bisa secara langsung
menjadi variabel terukur atau beda antara variabel terukur tersebut dengan suatu nilai referensi yang telah ditentukan yang merupakan error. Selain error juga diperlukan masukan lain seperti perubahan error (
dt de
) yang digunakan dalam
premise aturan. Selain perubahan error, dalam kasus sistem kendali fuzzy untuk
implementasi waktu diskret digunakan
CV
≡
e
( ) (
t
−
e
t
−
T
)
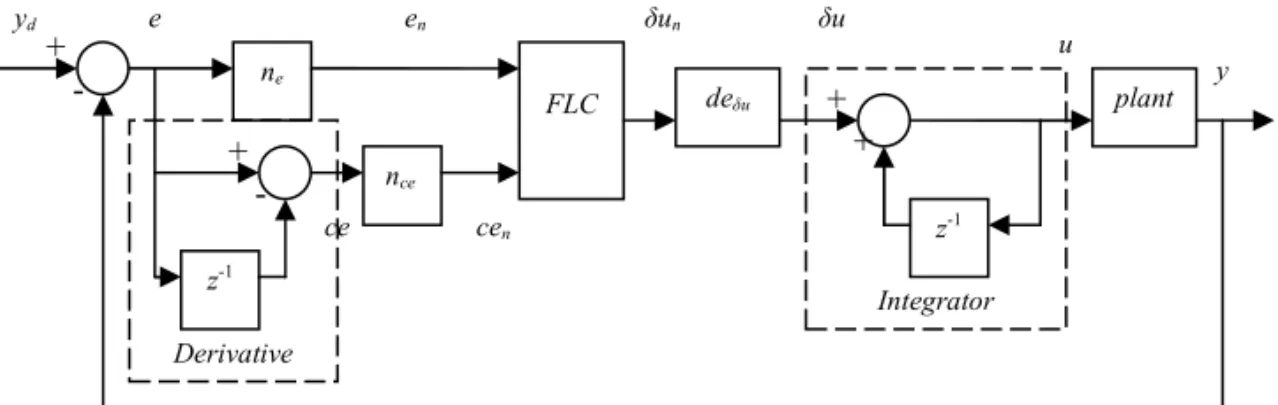
dengan T merupakan periode cuplik sistem.Secara umum, arsitektur sistem kendali fuzzy ditunjukkan dalam gambar 4.1 yang memetakan error, e = yd – y ke dalam aksi pengendali, u. Pengendalian dilakukan oleh FLC yang memetakan nilai error, en(t), dan perubahan error ternormalisasi, cen(t), yang dinyatakan sebagai
( )
( )
( )
t
n
(
e
( ) (
t
e
t
T
)
)
ce
t
e
n
t
e
ce n e n−
−
=
=
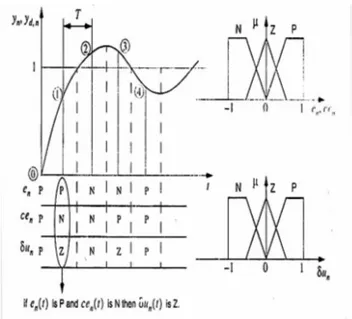
(4.1)dengan T adalah time step, ne dan nce adalah faktor normalisasi, ke dalam perubahan aksi pengendali δun(t) melalui aturan dalam bentuk: If en(t) is P and
cen(t) is N then δun(t) is Z.
P, N, Z merupakan kependekan dari positive, negative dan zero, yang didefinisikan sebagai fuzzy set melalui variabel-variabel yang relevan seperti yang ditunjukkan dalam gambar 4.2.
Keluaran dari FLC adalah perubahan dari aksi kontrol. Untuk memperoleh aksi kontrol u, perlu diintegralkan dan didenormalisasikan dengan menggunakan faktor denormalisasi deδu, sehingga diperoleh nilai aksi kontrol saat t, dimana nilai perubahan aksi kontrol ditambah dengan nilai u sebelumnya, melalui rumus:
( ) (
t
u
t
T
)
de
u
( )
t
u
=
−
+
δuδ
n (4.2)Aturan-aturan secara efektif menyatakan skenario operasi dari suatu sistem, seperti yang ditunjukkan dalam gambar 4.2. Aturan-aturan tambahan ditentukan dari inspeksi dan dapat dilihat dalam tabel 4.1.
Seperti pada pengendali PI yang telah dijelaskan dalam bab 3, pengendali
fuzzy juga dirancang untuk masing-masing pasangan input-output. Masing-masing
pengendali fuzzy menggunakan tiga fungsi keanggotaan (membership) dan sembilan aturan seperti yang disebutkan dalam tabel 4.2.
Bagian yang penting dalam perancangan pengendali adalah menyelaraskan (tune) parameter-parameter pengendali untuk memperoleh kinerja kendali yang baik. Parameter-parameter yang diselaraskan dalam pengendali fuzzy adalah faktor normalisasi, faktor denormalisasi dan rentang nilai fungsi keanggotaan.
Gambar 4.2 Arsitektur umum sistem pengendali fuzzy ne nce z-1 FLC deδu plant z-1 en ce cen δun δu u e yd y Derivative Integrator + - + - + +
Gambar 4.3. Aturan-aturan kendali untuk pengendali fuzzy sederhana secara umum Tabel 4.2 Aturan-aturan kendali fuzzy secara umum
error, en Atribut yang diamati
perubahan error, cen Atribut yang dikendalikan perubahan input, δun
Kondisi aturan aksi I. Mulai, input dalam tanggapan
diubah ke perubahan setpoint
If en is P and cen is P then δun is P
If en is N and cen is N then δun is N
If en is P and cen is Z then δun is P
II. Plant tidak merespon; input
disesuaikan If en is N and cen is Z then δun is N If en is P and cen is N then δun is Z III. Tanggapan plant normal, input
dijaga tetap If en is N and cen is P then δun is Z IV. Mencapai kesetimbangan If en is Z and cen is Z then δun is Z If en is Z and cen is N then δun is N
V. Error nol, tetapi ada perubahan,
lakukan aksi If en is Z and cen is P then δun is P
Setelah melalui beberapa kali percobaan, maka diperoleh fungsi keanggotaan seperti yang ditunjukkan dalam gambar 4.1 – 4.3. Faktor normalisasi yang digunakan adalah 1 dan faktor denormalisasi untuk masing-masing pengendali adalah: deδu1 = 0.05, deδu1 = 3, deδu1 = 3, deδu1 = 2 dan deδu1 = 0.25. Output yang
dikendalikan adalah lima output (H1-H4 dan ρ4) sedangkan ketujuh output yang lain
HASIL SIMULASI DAN ANALISA
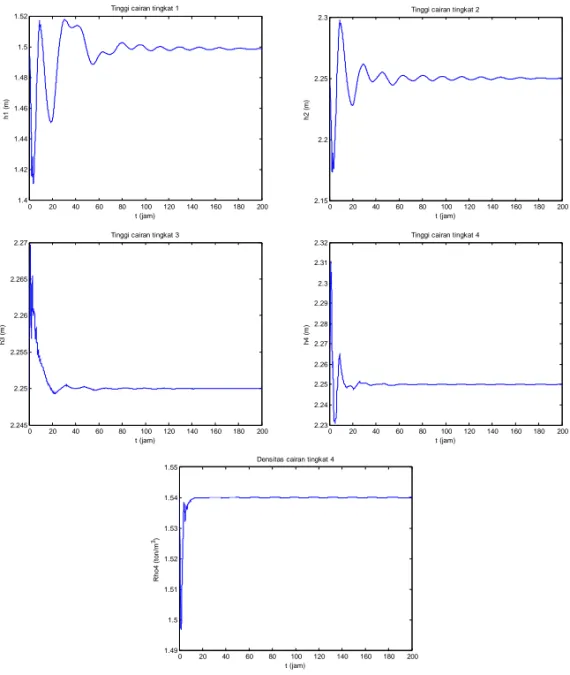
Dalam gambar 5.1 ditunjukkan hasil simulasi dari perancangan pengendali
fuzzy untuk sistem evaporator industri. Secara umum, jika dibandingkan dengan
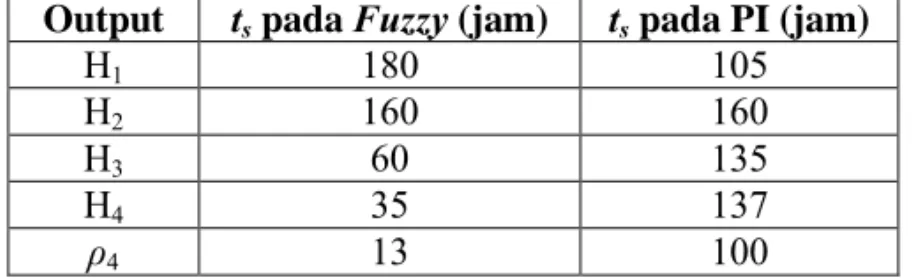
hasil simulasi pengendali PI yang ditunjukkan dalam gambar 3.2, waktu tanggapan pengendali fuzzy untuk mencapai kondisi steady state (settling time) lebih cepat, kecuali pada output tinggi cairan tangki pertama. Besar settling time tanggapan pada kedua pengendali dapat dilihat dalam tabel 5.1. Hanya saja, pada output H4
dan ρ4 terdapat riak-riak kecil (ripple). Ripple ini terjadi karena pengaruh FLC
yang mempunyai fungsi keanggotaan zero dengan rentang nilai tertentu. Overshoot
yang terjadi pada pengendali fuzzy, pada output H3 dan H4 lebih kecil daripada
overshoot pengendali PI, dapat dilihat dalam tabel 5.2.
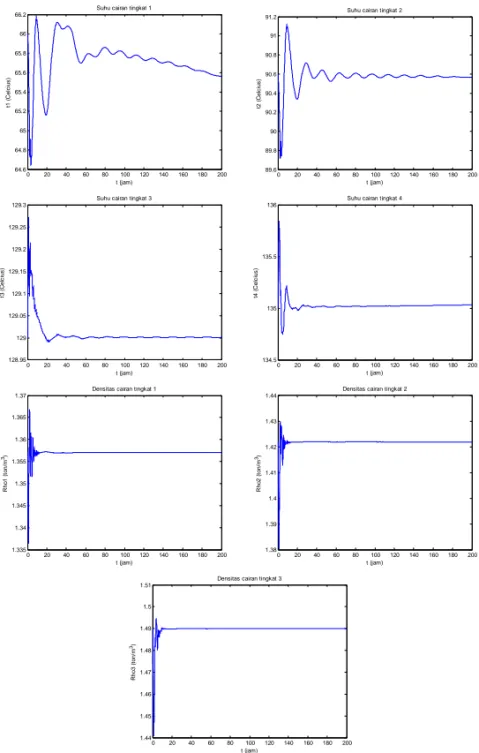
Dalam gambar 5.2 ditunjukkan hasil simulasi sistem evaporator dengan menggunakan pengendali fuzzy untuk tujuh state termonitor yang tidak dikendalikan, yaitu suhu pada keempat tangki (T1-T4) serta densitas ketiga tangki
pertama (ρ1-ρ3). Tampak bahwa dengan pengendalian lima output, ketujuh state
yang lain juga dapat terkendali, terbukti dengan stabilnya ketujuh state tersebut setelah pengendalian, kecuali pada output T1, dimana tanggapan plant bersifat
open-loop unstable (gambar 3.1).
Tabel 5.1 Settling time (ts) tanggapan pada pengendali fuzzy dan PI
Output ts pada Fuzzy (jam) ts pada PI (jam)
H1 180 105
H2 160 160
H3 60 135
H4 35 137
ρ4 13 100
Tabel 5.2 Persen overshoot tanggapan pada pengendali fuzzy dan PI
Output %OS pada Fuzzy %OS pada PI
H1 1.267 0.667
H2 2.22 0.533
H3 0.711 16.67
H4 2.667 14.67
Jika dibandingkan antara hasil simulasi untuk tujuh state termonitor yang tidak dikendalikan antara pengendali fuzzy (gambar 5.2) dan pengendali PI (gambar 5.3), tampak bahwa pada pengendali PI terdapat steady state error (SSE) pada T1, T2, T4
dan ρ3 yang lebih besar daripada hasil pada pengendali fuzzy, dapat dilihat dalam tabel
5.3. Tanggapan pada suhu tangki pertama semakin menurun sejalan dengan bertambahnya waktu, sama dengan tanggapan T1 pada pengendali fuzzy, bahkan
SSE-nya lebih besar.
0 20 40 60 80 100 120 140 160 180 200 1.4 1.42 1.44 1.46 1.48 1.5 1.52 t (jam) h1 ( m )
Tinggi cairan tingkat 1
0 20 40 60 80 100 120 140 160 180 200 2.15 2.2 2.25 2.3 t (jam) h2 ( m )
Tinggi cairan tingkat 2
0 20 40 60 80 100 120 140 160 180 200 2.245 2.25 2.255 2.26 2.265 2.27 t (jam) h3 ( m )
Tinggi cairan tingkat 3
0 20 40 60 80 100 120 140 160 180 200 2.23 2.24 2.25 2.26 2.27 2.28 2.29 2.3 2.31 2.32 t (jam) h4 ( m )
Tinggi cairan tingkat 4
0 20 40 60 80 100 120 140 160 180 200 1.49 1.5 1.51 1.52 1.53 1.54 1.55 t (jam) R ho4 ( to n /m 3)
Densitas cairan tingkat 4
Gambar 5.1. Hasil simulasi pengendalian sistem evaporator dengan menggunakan pengendali fuzzy
Tabel 5.3 Steady State Error (SSE) tanggapan tujuh state tak terkendali T1 T2 T3 T4 ρ1 ρ2 ρ3 SSE (%) Fuzzy -0.6 -0.011 - 0.0148 - - - SSE (%) PI -1.5384 -0.6 - -0.44 - - -0.067
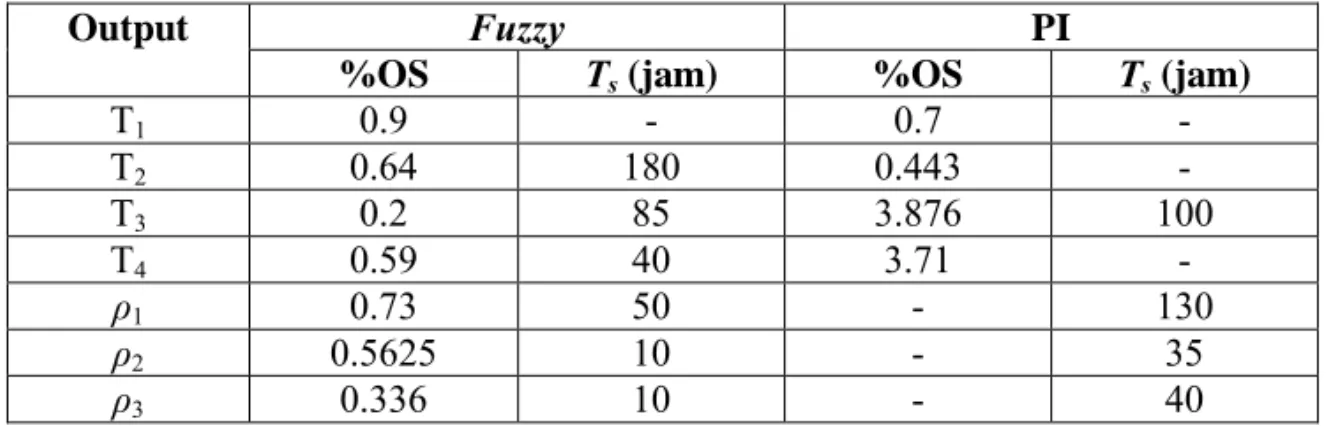
Tabel 5.4. Perbandingan persen overshoot (%OS) dan settling time (Ts) tanggapan tujuh state tak terkendali
Fuzzy PI
Output
%OS Ts (jam) %OS Ts (jam)
T1 0.9 - 0.7 - T2 0.64 180 0.443 - T3 0.2 85 3.876 100 T4 0.59 40 3.71 - ρ1 0.73 50 - 130 ρ2 0.5625 10 - 35 ρ3 0.336 10 - 40
Dalam tabel 5.4 ditunjukkan perbandingan persen overshoot dan settling time
antara pengendali fuzzy dan PI, dengan catatan, persen oversoot dan settling time
dihitung pada kondisi steady state, , karena adanya steady state error pada variabel
state tertentu. Dari tabel tersebut tampak bahwa kinerja pengendali fuzzy lebih baik
daripada pengendali PI, khususnya untuk T3 dan T4. Tidak hanya tanggapan suhu
pada tangki pertama, tanggapan suhu pada tangki kedua dan keempat pada pengendali PI pun semakin menurun, yang menunjukkan bahwa tanggapan bersifat tidak stabil.
0 20 40 60 80 100 120 140 160 180 200 64.6 64.8 65 65.2 65.4 65.6 65.8 66 66.2 t (jam) t1 ( C el c ius )
Suhu cairan tingkat 1
0 20 40 60 80 100 120 140 160 180 200 89.6 89.8 90 90.2 90.4 90.6 90.8 91 91.2 t (jam) t2 ( C el c ius )
Suhu cairan tingkat 2
0 20 40 60 80 100 120 140 160 180 200 128.95 129 129.05 129.1 129.15 129.2 129.25 129.3 t (jam) t3 (C el c ius )
Suhu cairan tingkat 3
0 20 40 60 80 100 120 140 160 180 200 134.5 135 135.5 136 t (jam) t4 ( C el c ius )
Suhu cairan tingkat 4
0 20 40 60 80 100 120 140 160 180 200 1.335 1.34 1.345 1.35 1.355 1.36 1.365 1.37 t (jam) R h o 1 ( ton/ m 3)
Densitas cairan tingkat 1
0 20 40 60 80 100 120 140 160 180 200 1.38 1.39 1.4 1.41 1.42 1.43 1.44 t (jam) R h o 2 ( ton/ m 3)
Densitas cairan tingkat 2
0 20 40 60 80 100 120 140 160 180 200 1.44 1.45 1.46 1.47 1.48 1.49 1.5 1.51 t (jam) R ho3 ( ton /m 3)
Densitas cairan tingkat 3
Gambar 5.2. Hasil simulasi sistem evaporator dengan menggunakan pengendali fuzzy
0 20 40 60 80 100 120 140 160 180 200 60 61 62 63 64 65 66 67 t (jam) t1 ( C el c ius )
Suhu cairan tingkat 1
0 20 40 60 80 100 120 140 160 180 200 89.6 89.8 90 90.2 90.4 90.6 90.8 91 t (jam) t2 (C el c ius )
Suhu cairan tingkat 2
0 20 40 60 80 100 120 140 160 180 200 127 128 129 130 131 132 133 134 135 t (jam) t3 ( C el c ius )
Suhu cairan tingkat 3
0 20 40 60 80 100 120 140 160 180 200 133 134 135 136 137 138 139 140 t (jam) t4 ( C el c ius )
Suhu cairan tingkat 4
0 20 40 60 80 100 120 140 160 180 200 1.24 1.26 1.28 1.3 1.32 1.34 1.36 t (jam) R ho1 ( ton /m 3)
Densitas cairan tingkat 1
0 20 40 60 80 100 120 140 160 180 200 1.25 1.3 1.35 1.4 1.45 t (jam) R ho2 ( ton /m 3)
Densitas cairan tingkat 2
0 20 40 60 80 100 120 140 160 180 200 1.25 1.3 1.35 1.4 1.45 1.5 1.55 t (jam) R ho3 ( ton/ m 3)
Densitas cairan tingkat 3
Gambar 5.3. Hasil simulasi sistem evaporator dengan menggunakan pengendali PI untuk tujuh state yang tidak dikendalikan
KESIMPULAN
Dari hasil simulasi dan analisa perancangan pengendali untuk sistem evaporator yang merupakan sistem MIMO open-loop unstable dapat disimpulkan bahwa:
1. Apabila tidak ada gangguan pada gangguan pada laju alir dan temperatur feed, untuk pengendalian tinggi cairan pada tangki ketiga dan keempat serta densitas cairan pada tangki keempat, pengendali fuzzy yang dirancang mempunyai kinerja yang lebih baik daripada pengendali Proportional Integral (PI), dengan persen overshoot dan waktu tanggapan untuk mencapai kondisi steady state
(settling time)yang lebih kecil daripada pengendali PI
2. Pemilihan parameter-parameter input dan output sudah tepat, terbukti dengan adanya tujuh state lain yang tidak dikendalikan juga terpantau memberikan tanggapan yang baik.
DAFTAR PUSTAKA
1. K.M. KAM, P. SAHA, M.O. TADẻ and G.P. RANGAIAH, Models of an Industrial Evaporator System for Education and Research in Process Control,
http://www.iitg.ac.in/engfac/chemeng/public_html/pksaha.html, 2002.
2. K.M. KAM and B. ENG (HONS), Dynamic Modelling and Differential
Geometric Analyses of an Industrial Five-effect Evaporator,
http://adt.curtin.edu.au/theses/ available/ adt-WCU20020506.132319/, Februari 2000.
3. G.P.RANGAIAH, P.SAHA and M.O. TADẻ, Nonlinear Mode Predictive
Control of an Industrial Four-stage Evaporator System Via Simulation,
Chemical Engineering Journal 87, (2002) page 285-299, http://www.iitg.ac.in/engfac/chemeng/ public_html/pksaha.html
4. ESTIYANTI EKAWATI, Controllability Assessment of an Industrial
Five-effect Evaporator Process, http://wwwlib.murdoch.edu.au/adt/pubfiles/
adt_MU20040820.113446/ 08Chapter7.pdf, Desember 2003.
5. BEQUETTE, B. WAYNE, Process Dynamics Modelling, Analysis, and
Simulation, Prentice Hall International Series in the Physical and Chemical
6. CARLOS A. SMITH and ARMANDO B. CORRIPIO, Principles and Practice
of Automatic Process Control, John Wiley & Sons, Singapore, 1985.
7. HARI WIBAWANTO, Pengendali Berbasis Logika Fuzzy.htm, ELEKTRO INDONESIA edisi ke empatbelas, Agustus 1998, http://www.elektroindonesia.com/elektro/kend14b.html
8. Exercise_8.pdh, Plant Wide Process Control Design, Assessing Interaction
Using RGA on A Linearized State Space Dynamic Model,
http://www.glue.umd.edu/~mcavoy/Exercise_8/Exercise_8.pdf
9. JOHN, REZA LANGARI, Fuzzy Logic Inteligence, Control and Information, Prentice Hall, 1999.
Apendiks
1. Model matematika sistem evaporator
a. Flash tank 1 1 1 1 1 1 1 1 1 1 1 1 0 1 1 1 1 1 1 1 1 1 1 1 − − + − = − − − = − − = E Q Q m E T C dt dT Q E A h dt d E Q Q A dt dh w P f V V f f f w w P f ρ ρ ρ ρ ρ ρ ρ ρ ρ C dengan 1 1 2 1 1 1 1 1 1 1 1 1 = = + − = E m m m m T c Q T c Q E V V S V S S P f f f f λ λ ρ ρ C C C C
(
)
(
) (
) (
)
1 . 273 1 . 273 75 . 0 96 . 33 75 . 0 1 . 273 1 1 1 1 1 1 1 1 1 0 1 1 1 1 1 1 − + − − + − = − = − + = BPE T BPE T R M h A V T C T P BPE T R MP V V ρ ρM merupakan massa molekul air dan R merupakan konstanta gas. b. Flash tank 3 1 1 1 1 1 3 3 2 3 3 3 3 0 3 2 3 2 2 3 3 3 3 3 3 3 2 3 3 − − + − = − − − = − − = E Q Q m E T C dt dT Q E A h dt d E Q Q A dt dh w P P V V P w w P P ρ ρ ρ ρ ρ ρ ρ ρ ρ
dengan
(
)
(
)
(
) (
) (
)
1 . 273 1 . 273 09 . 4 38 . 410 09 . 4 1 . 273 38 . 2 / 76 . 5 3 3 3 3 3 3 3 3 3 0 3 3 3 3 3 3 3 3 4 3 3 3 3 3 3 3 3 2 2 2 2 3 − + − − + − = − = − + = = = + − = BPE T BPE T R M h A V T C T P BPE T R MP E m m m m T c Q T c Q E V V V S S V S S P P ρ ρ λ λ ρ ρ c. Flash tank 4 1 1 1 1 3 4 3 3 4 4 4 4 4 4 4 3 4 4 − − − = − − = Q E A h dt d E Q Q A dt dh P w w P P ρ ρ ρ ρ ρ ρ ρ 1 4 4 3 4 4 4 4 0 4 − − + − = E m Q Q E T C dt dT w P P V V ρ ρ dengan(
)
(
) (
) (
)
1 . 273 1 . 273 09 . 4 95 . 434 09 . 4 1 . 273 4 4 4 4 4 4 4 4 4 0 4 4 4 4 4 4 4 4 4 4 4 4 4 4 4 3 3 3 3 4 − + − − + − = − = − + = = + − = BPE T BPE T R M h A V T C T P BPE T R MP E m m T c Q T c Q E V V V V S S P P ρ ρ λ λ ρ ρd. Matriks G(0) + = 003 -0104397e 4.42008245 -002 -9728001e 2.32156493 -004 -5657163e 1.42654839 004 -6007060e 2.98081552 -003 -5542995e 4.77013378 2916915 5.38390807 -001 -8319628e 3.57030127 003 -7571993e 1.05643349 003 -1611469e 2.35444522 -5489721 1.77901415 000 3336191e 3.67232279 -2927899 1.61118791 0786661 1.29401573 -003 -6067564e 2.10720967 -2485155 1.71411235 -009 -0752518e 2.60181031 -4579049 1.77704392 012 -6545539e 6.69849042 0988454 1.53708827 2886511 1.88650528 -007 -1955245e 1.00046233 -009 -6272760e 7.64867991 012 -9969549e 6.70299330 3951512 1.22048578 0357986 2.35093973 -) 0 ( G e. Matriks Decoupler
DISKUSI
FAIZAL RIZA
1. Apakah juga merancang pengendali fuzzy untuk evaporator tidak bertingkat? 2. Mengapa hanya menggunakan variabel tinggi cairan dan densitas, sedangkan
variabel kecepatan aliran, temperature dan sifat fluidanya. Mohon dijelaskan
WURI B. HARINI
1. Saya tidak merancang pengendali fuzzy untuk single evaporator karena sudah diteliti oleh peneliti lain.
2. Karena dari eigen vector diperoleh bahwa hanya lima output tersebut yang penting untuk dikendalikan, dan terbukti bahwa dengan pemilihan lima output tersebut, ketujuh state yang lain juga menghasilkan keluaran yang diinginkan
TOPAN
Lebih efektif mana counter-current atau con-current ?
WURI B. HARINI
Secara research, saya belum pernah meneliti mana yang lebih efektif. Jika dilihat dari steam yang masuk, jika menggunakan counter current, untuk efek ke-2, diperlukan masukan energi dari uap hasil tangki ke-3 dan 4 guna melakukan proses evaporasi. Untuk mode con-current, uap hasil flash tank bisa digunakan untuk sumber energi flash tank selanjutnya.
DAFTAR RIWAYAT HIDUP
1. Nama : B. Wuri Harini, S.T
2. Tempat/Tanggal Lahir : Sleman, 11 Oktober 1976
3. Instansi : Universitas Sanata Dharma, Yogyakarta 4. Pekerjaan / Jabatan : Staf Pengajar
5. Riwayat Pendidikan : (setelah SMA sampai sekarang)
• Teknik Elektro, Fakultas Teknik, Universitas Gadjah Mada, Yogyakarta (1995 – 1999)
• Pasca Sarjana Teknik Elektro, Fakultas Teknik, Universitas Indonesia kekhususan Teknik Kontrol Industri (2004-2006)
6. Pengalaman Kerja :
• Staf Pengajar Teknik Elektro, Fakultas Teknik, Universitas Sanata Dharma, Yogyakarta (2000-sekarang)
7. Publikasi (Makalah) :
• Pengendalian Motor Stepper Berbasis PC, Media Teknika Universitas Sanata Dharma, Yogyakarta, Vol 1 No 1, Desember 2001
• Teknik Adaptif dalam Sistem Kontrol, Media Teknika Universitas Sanata Dharma, Yogyakarta, Vol 4 No. 1, Juni 2004
• Perkembangan Smart Card dalam Era Teknologi Informasi, Industrial
Information Technology, Universitas Sanata Dharma, Yogyakarta, 2004.