28
BAB III
PERANCANGAN DAN PEMBUATAN ROBOT
3.1 Umum
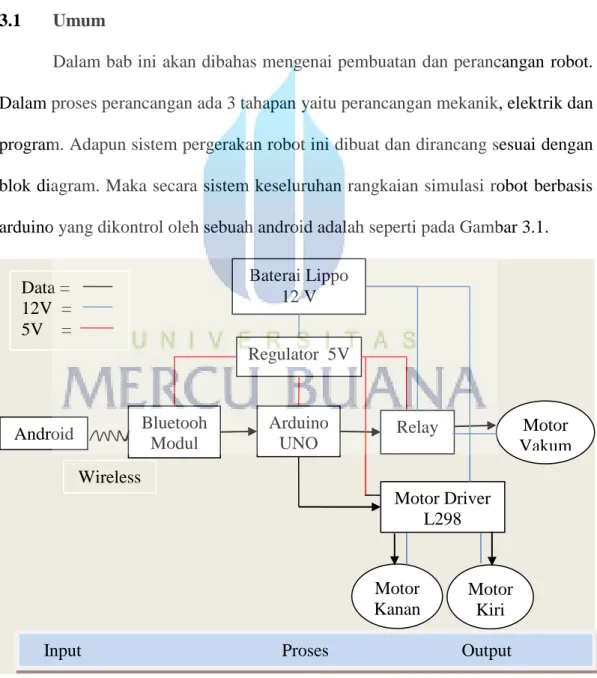
Dalam bab ini akan dibahas mengenai pembuatan dan perancangan robot. Dalam proses perancangan ada 3 tahapan yaitu perancangan mekanik, elektrik dan program. Adapun sistem pergerakan robot ini dibuat dan dirancang sesuai dengan blok diagram. Maka secara sistem keseluruhan rangkaian simulasi robot berbasis arduino yang dikontrol oleh sebuah android adalah seperti pada Gambar 3.1.
Gambar 3.1 Blok Diagram
Baterai Lippo 12 V Arduino UNO Bluetooh Modul Android Motor Driver L298 Motor Kiri Motor Kanan Motor Vakum Relay Regulator 5V Data = 12V = 5V = Wireless
Penjelasan Blok Diagram:
Untuk menggerakan atau menjalankan robot tersebut, penulis menggunakan sistem kendali dengan android. Komunikasi antara sistem kendali dengan robot menggunakan Bluetooth.
Dalam robot tersebut terdapat tiga buah motor dc yang memiliki fungsi berbeda, dua motor DC utama digunakan untuk sistem penggerak robot. Dimana kedua motor DC ini diatur kecepatan dan arah putarnya menggunakan Driver Motor. Sedangkan motor DC lainnya digunakan sebagai Vacuum yang disambungkan dengan relay 1 chanel yang berfungsi sebagai saklar (Switch).
3.2 Perancangan Mekanik
Untuk mendapatkan hasil perencanaan dan perancangan mekanik yang baik diperlukan beberapa tahap. Adapun tahap-tahap tersebut adalah sebagai berikut.
3.2.1 Desain Mekanik
Dalam proses pembuatan suatu alat / robot desain mekanik sangatlah penting. Dengan mendesain terlebih dahulu penulis dapat menentukan bentuk serta ukuran robot sesuai dengan yang diinginkan, selain itu juga untuk mengurangi tingkat kesalahan yang nantinya terjadi apabila dalam pembuatan mekanik tidak diperhitungkan terlebih dahulu. Dalam tahapan ini penulis menggunakan software desain AutoCAD. Selain mudah dalam penggunaan, software ini juga bisa mendesain secara 3 dimensi.
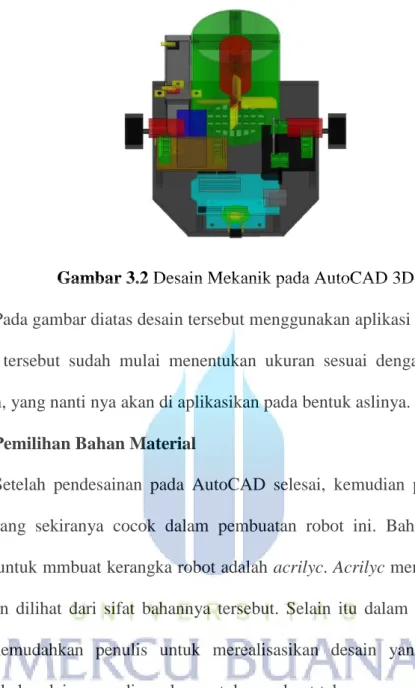
Gambar 3.2 Desain Mekanik pada AutoCAD 3D
Pada gambar diatas desain tersebut menggunakan aplikasi AutoCAD, pada tahapan tersebut sudah mulai menentukan ukuran sesuai dengan yang penulis inginkan, yang nanti nya akan di aplikasikan pada bentuk aslinya.
3.2.2 Pemilihan Bahan Material
Setelah pendesainan pada AutoCAD selesai, kemudian penulis memilih bahan yang sekiranya cocok dalam pembuatan robot ini. Bahan yang dipilih penulis untuk mmbuat kerangka robot adalah acrilyc. Acrilyc mempunyai banyak kelebihan dilihat dari sifat bahannya tersebut. Selain itu dalam pembuatan juga lebih memudahkan penulis untuk merealisasikan desain yang telah dibuat. Adapun bahan lain yang digunakan untuk membuat tabung penyedot debu adalah paralon.barulah membuat atau merealisasikann satu persatu bagian dari robot itu sendiri sesuai dengan bentuk serta ukuran yang telah ditentukan.
3.2.2.1 kerangka Robot
Kerangka robot adalah bentuk dasar pada suatu robot dimana yang nantinya akan diletakkan komponen-komponen di atasnya. Bahan yang digunakan penulis untuk membuat kerangka robot ini adalah akrilik. Dimana akrilik ini dipotong secara manual dengan menggunakan gergaji besi sesuai dengan bentuk
desain dan ukuran yang sudah ditentukan.
Gambar 3.3 Kerangka Robot 3.2.2.2 Tabung Penyedot Debu (Vacuum)
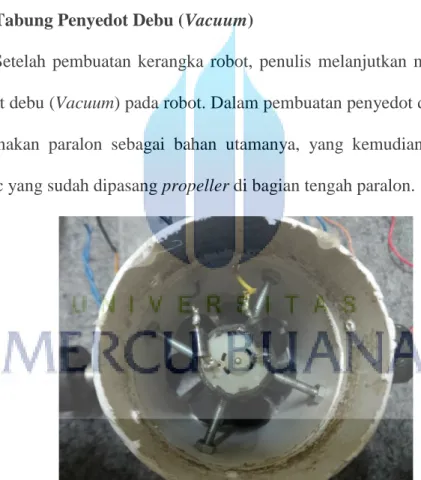
Setelah pembuatan kerangka robot, penulis melanjutkan membuat sistem penyedot debu (Vacuum) pada robot. Dalam pembuatan penyedot debu ini penulis menggunakan paralon sebagai bahan utamanya, yang kemudian menempatkan motor dc yang sudah dipasang propeller di bagian tengah paralon.
Gambar 3.4 Tabung Penyedot Debu (Vacuum)
3.3 Perancangan Elektrik
Dalam pembuatan sebuah robot tentunya tidak terlepas dari adanya ssistem elektrikal. Oleh karena itu untuk mendapatkan system elektrikal sesuai
kebutuhan maka perlu dilakukan perancangan. Adapun perancangan disini adalah pembuatan regulator, pembuatan motor driver, pembuatan relay, pemasangan motor DC, pemasangan baterai, serta komponen komponen pendukung lainya seperti kabel saklar, dll. Berikut adalah blok diagram sistem elektrikal pada robot penyedot debu.
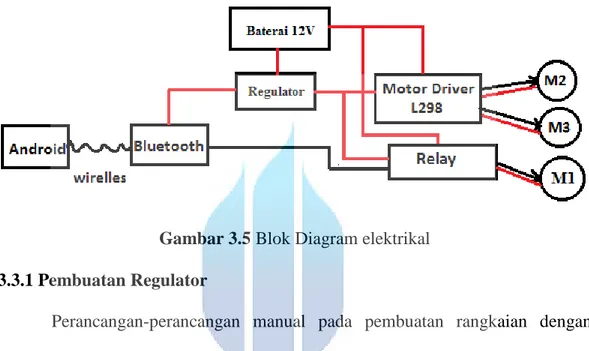
Gambar 3.5 Blok Diagram elektrikal 3.3.1 Pembuatan Regulator
Perancangan-perancangan manual pada pembuatan rangkaian dengan menggunakan bantuan perangkat lunak “ISIS proteus” sebagai langkah awal atau simulasi sebelum dilakukan rancangan diatas PCB (Printed Circuit Board) dan pengujian dalam bentuk rangkaian.
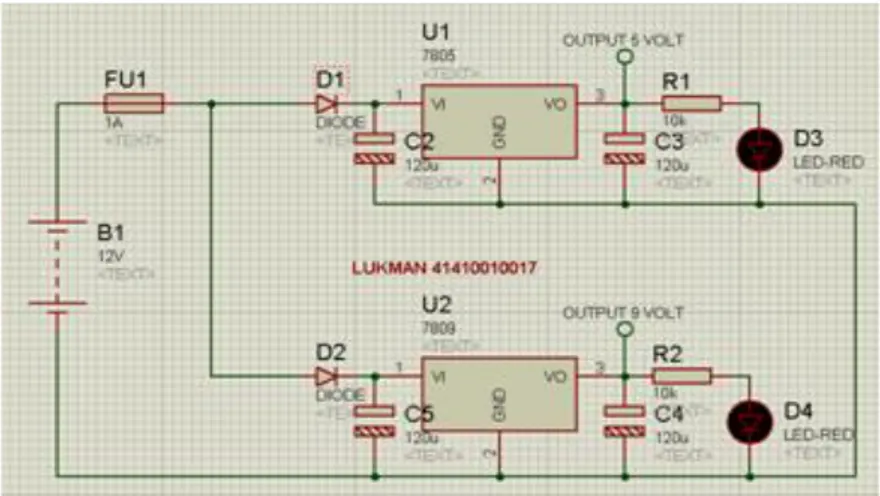
Pada perancangan ini dimulai dari pemilihan beberapa komponen penyusun regulator seperti IC 7805, IC 7809, yang digunakan sebagai pemotong tegangan, kapasitor elektrolit sebagai penyimpan tegangan sementara serta penstabil keluaran, diode sebagai pencegah arus balik (feed back), fuse yang digunakan sebagai proteksi ketika adanya hubung singkat yang melebihi arus tamping pada diode dan resistor, serta led sebagai dua omponen indikator.
Gambar 3.6 Simulasi Regulator 5V pada “ISIS-Proteus”
Tegangan awal yang berasal dari baterai sebesar 12 volt yang kemudian ditampung sementara pada kapasitor elektrolit sebelum melewati 7805 untuk dipotong menjadi 5 volt dan keluarannya diperhalus oleh kapasitor elektrolit.
Selain penggunaan IC 7805, pada rangkaian regulator ini digunakan juga IC 7809, sesuai jenis nya IC 7809 ini memotong tegangan menjadi 9 volt yang dan keluarannya diperhalus dengan kapasitor elektrolit.
Sebagai proteksi pada regulator ini menggunakan peranan dari diode yang dapat menahan arus balik dengan besar arus tertentu saat terjadi gangguan seperti hubung singkat. Pemilihan diode yang digunakan dilihat berdasarkan kemungkinan arus balik yang besarnya melebihi besar sumber arus dengan toleransi sekecil mungkin. Selain diode proteksi pada regulator ini ada juga penggunaan fuse pada titik awal keluaran baterai sebagai proteksi terakhir saat terjadi gangguan sepert hubung singkat.
Sedangkan untuk keluaran yang sebesar 5 volt menggunakan indikator berupa led yang sebelumnya tegangannya telah dibagi oleh resistor, karena led tidak dapat menerima tegangan sebesar 5 volt yang akan mengakibatkan kerusakan pada led itu sendiri.
Setelah simulasi pada ISIS Proteus berikutnya adalah tahap pembuatan jalur rangkaian sebelum dicetak di atas lembaran PCB (Printed Circuit Board).
Gambar 3.7 Regulator 5V pada perangkat lunak “ARES”
Kemudian dari jalur rangkaian tersebut dicetak pada lembar transparan sebagai perantara untuk mencetak jalur pada papan PCB (Printed Circuit Board).
Gambar 3.8 Rangkaian Regulator 5V pada Lembar Transparan
Setelah itu menggosoknya menggunakan setrika di atas papan PCB (Printed Circuit Board) dengan sendirinya akan memindahkan jalur ke papan PCB. Terakhir setelah jalur menempel pada papan PCB, papan PCB tersebut di aduk pada larutan flerit clorit dengan tujuan untuk menghilangkan bagian tembaga yang tidak diperlukan dan menyisakan tembaga yang merupakan jalur dari rangkaian. Pada tahap inilah akan didapatkan sebuah rangkaian yang siap untuk di bor sebelum penempatan komponen-komponen yang diperlukan seperti, kapasitor, IC(Integrated Circuit) 7805, resistor, indikator berupa LED(Light Emitting Diode) dan beberapa terminal block dipasang.
Gambar 3.9 Regulator 5 volt
Regulator disini dibuat dimaksudkan untuk membatasi tegangan. Dikarenakan ada beberapa komponen yang hanya memerlukan tegangan kecil yaitu 5 volt atau yang biasa disebut dengan “vcc”. Untuk mendapatkan tegangan tersebut dibutuhkan suatu IC(integrated circuit) pembatas tegangan. Pada badan komponen biasanya tertera nilai daripada suatu IC(integrated circuit) tersebut. Pada umumnya nilai tersebut adalah 78xx untuk nilai positif dan 79xx untuk nilai negativnya. Kode “xx” diatas disesuaikan dengan nilai pembatasan tegangan yang dapat dilakukan oleh IC tersebut. Sebagai missal 7805 untuk pembatasan tegangan 5 volt, kemudian ada juga 7809 untuk tegangan 9volt begitupula seterusnya seperti 7812,7818,7824 dan lain –lain. Dibawah ini adalah IC(integrated circuit) yang digunakan pada rangkain regulator untuk robot ini.
Dalam penggunaan IC(integrated circuit) tersebut penulis memasang pada sebuah rangkain regulator. IC(integrated circuit) tersebut dapat langsung digunakan dengan input DC(Direct current) diatas 5 volt ataupun dengan dilengkapi komponen- komponen pendukung seperti kapasitor , resistor maupun LED(Light Emitting Diode). Kapasitor penulis gunakan untuk mendapatkan tegangan DC(Direct current) yang stabil. Resistor digunakan untuk mengurangi tegangan yang biasanya untuk menyesuaikan kebutuhan tegangan LED(Light Emitting Diode). LED(Light Emitting Diode) disini penulis gunakan sebagai indicator untuk mengetahui ada tidaknya tegangan tanpa harus dilakukkan pengukuran. Indikator ini berupa cahaya sehingga mata kita akan lebih peka dalam mengetahui adanya tegangan output.
3.3.2 Pembuatan Motor Driver
Motor DC tidak dapat dikendalikan secara langsung oleh mikrokontroler, karena kebutuhan arus listrik yang besar pada motor DC sedangkan arus keluaran pada mikro sangat kecil. Motor driver merupakan pilihan alternatif yang digunakan untuk mengendalikan motor DC pada robot ini yang notabene untuk grakanya menggunakan roda. Ada beberapa motor driver yang sering digunakan pada aplikasi robotika, yaitu menggunakan rangkaian Bridge transistor, H-Bridge Mosfet, dan IC driver motor. Pada kali ini penulis akan coba membuat tentang rangkaian IC driver motor L298.
Kecepatan motor DC dapat diatur dengan beberapa cara, yaitu dengan mengatur fluks medan, dengan mengatur tahanan jangkar, dan dengan mengatur tegangan sumber. Cara yang ketiga ini merupakan pengaturan yang sering digunakan karena penggunaannya yang relatif mudah. Pengaturan tegangan
sumber biasanya menggunakan metode PWM (Pulse Width Modulation).
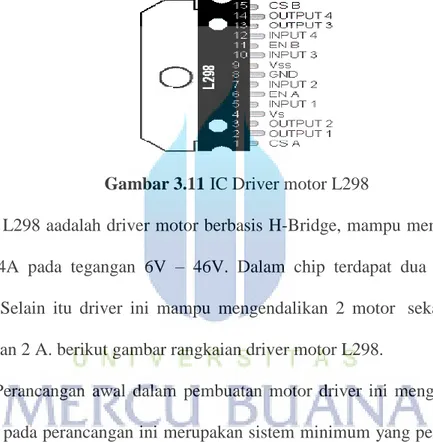
Selanjutnya penulis akan membuat driver motor. Driver motor yang mudah digunakan yaitu menggunakan IC driver motor DC seperti L293D atau L298N. IC driver motor yang penulis gunakan yaitu L298 hal ini dikarenakan kemampuan IC tersebut yang lebih baik dibandingkan IC L293D. Berikut adalah gambar IC driver motor L298.
Gambar 3.11 IC Driver motor L298
L298 aadalah driver motor berbasis H-Bridge, mampu menangani beban hingga 4A pada tegangan 6V – 46V. Dalam chip terdapat dua rangkaian H-Bridge. Selain itu driver ini mampu mengendalikan 2 motor sekaligus dengan arus beban 2 A. berikut gambar rangkaian driver motor L298.
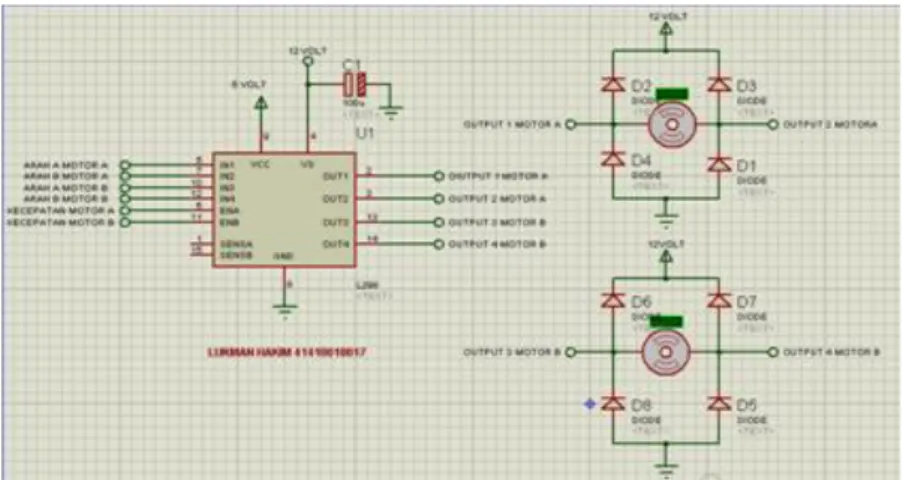
Perancangan awal dalam pembuatan motor driver ini menggunakan ISIS Proteus, pada perancangan ini merupakan sistem minimum yang penulis gunakan sebagai actuator penggerak robot dalam bentuk dua buah roda. Pada motor driver L298 ini terdapat 6 masukan untuk tiga buah motor yang masing-masingnya dua pasang masukan sebagai pengendali arah dan satu masukan untuk nilai kecepatan dengan maksimumm 8 bit.
Gambar 3.12 Simulasi Motor Driver pada ISIS Proteus
Berdasarkan perancangan awal pada ISIS Prtoteus diatas, motor driver dirancang untuk “motor A” dan “motor B” yang keduanya mempunya masukan baik arah maupun kecepatan untuk masing-masing motor. Untuk “motor A” dikendalikan dengan dua buah masukan sebagai pengendali arah yaitu “arah A motor A” dan “arah B motor A”yang keduanya harus saling berlawanan untuk menghasilkan arah putaran. Selain itu pada motor A dibutuhkan juga sebuah masukan untuk kecepatan putar motor yaitu “kecepatan motor A”. Adapun maksud dari logika masukan “arah A motor A” dan “arah B motor A” yang berbeda atau berlawanan adalah untuk memberikan keadaan rising dan volling, karena apabila keadaannya sama maka tidak aka nada awal untuk akhir. Karena pada perancangan motor ini menggunakan prinsip H-Bridge yang mempunyai dua keadaan berbeda, yaitu adanya awal dan akhir sebagai arah putar (adanya beda potensial).
Sama seperti hal nya motor A, motor B pun demikian. Pada motor B dikendalikan dengan dua buah masukan sebagai pengendali arah yaitu “arah A motor B” dan “arah B motor B” yang keduanya harus saling berlawanan untuk menghasilkan arah putaran. Selain itu pada motor B dibutuhkan juga sebuah
masukan untuk kecepatan putar motor yaitu “kecepatan motor B”.
Baik motor A mapun motor B menggunakan 4 diode yang dirangkai menyerupai huruf H (H-Bridge) yang masing-masing dua diantaranya terhubung pada motor adalah berguna untuk mencegah adanya arus balik (feed back) yang dapat merusak IC L298.
Perancangan kedua, merupakan perancangan elektrik yang menghubungkan motor driver dengan motor penggerak sesuai dengan sistem minimum. Selain itu juga menghubungkan motor driver dengan Arduino sebagai sistem kontrol serta menghubungkan sumber tegangan yang berasal dari regulator maupun baterai untuk suplai tegangan.
Pada perancangan elektrik motor driver diatas terdapat dua buah supply yang berbeda besar tegangannya, satu 5 volt dari regulator sedangkan satunya berasal dari baterai sebesar 12 volt. Hal ini ditujukan untuk mengaktifkan motor driver serta menggerakkan 2 buah motor penggerak, dengan 5 volt sebagai tegangan pengaktif motor driver sedangkan 12 volt ssebagai suplai kedua motor penggerak yang seolah-olah terangkai parallel.
Gambar 3.13 Motor Driver L298 3.3.3 Perancangan Modul Relay
Pada robot penghisap debu modul ini digunakan untuk mengontrol gerak motor DC (Direct Current) yang terhubung dengan propeller. Propeller sendiri
digunakan untuk penghisap debu dengan harapan dapat menghisap debu / kotoran saat propeller ini berputar. Berdasarkan kebutuhan arus yang besar untuk menghasilkan hisapan angin pada propeller mendasari digunakannya relay karena kemampuannya yang dapat menampung arus yang cukup besar.
Penggunaan relay disesuaikan dengan dua keadaan umum yang ada pada relay yaitu NO (normally Open) dan NC (Normally Close). Sehingga dengan memanfaatkan keadaan salah satunya yaitu NO (Normally Open) maka perancangan relay ini akan memberikan prinsip kerja seperti saklar dengan cukup memberikan tegangan 5V pada elemen untuk menutupnya “terhubung pada beban” yaitu motor DC (Direct Current).
Gambar 3.14 Modul Relay 3.4 Pemrograman
Pemrograman robot pada umumnya dilakukan pada tahap akhir, setelah perancangan mekanik dan elektrik terselesaikan. Karena dalam proses pemrograman pada umumya programer melakukkan dengan cara uji coba. Sehingga untuk melakukkanya komponen perangkat robot harus dapat dioprasikan. Pemrograman adalah memasukkan suatu informasi atau kode-kode (coding) kedalam suatu mikrokontroler. Dimana diharapkan suatu robot dapat
beroperasi sesuai dengan kemauan pemiliknya atau perencanaan awal sebelum suatu robot dibuat. Begitu pula dengan robot ular ini, diharapkan robot ini dapat beroperasi secara otomatis tanpa kendali pemilikknya. Sehingga robot ini mempunyai kemandirian yang tinggi akan tugasnya.
Dengan memanfaatkan suatu mikrokontroler Arduino Uno. Robot ini diprogram sedemikian rupa sehingga menjadi suatu robot yang dengan kecerdasan yang mandiri. Dalam proses pemrograman terlebiih dahulu penulis melakukkan pemrograman tiap- tiap perangkat penunjang robot. Dalam arti pemrograman keseluruhan robot dilakukkan setelah dilakukan pemrograman perangkat penunjangnya.
3.4.1 Pemrograman Motor DC pada motor driver L298
Dengan menggunakan motor driver kita akan lebih mudah dalam menggerakkan ataupun mengontrol putaran motor DC. Karena dengan adanya motor driver akan memudahkan dalam proses pemrograman yaitu cukup dengan memberikan kode biner 1 (high) atau 0 (low) pada eneable motor driver sehingga dengan cara itu kita akan dapat menggerakkan ataupun menghentikkan motor dengan pemrograman. Kemudian untuk mengontrol gerak putaran motor baik dalam kecepatan maupun arah putar kita perlu memasukkan pulsa pada kedua pin motor driver. Dengan cara mencacah tegangan menjadi kode bit analog yang terdapat pada mikrokontroler Arduino ini. Sehingga akan menghadirkan tegangan yang beragam.
Berikut adalah kode bit dari PWM (Pulse widh Modulation) untuk mengatur kecepatan motor.
Gambar 3.15 Pulse widh modulation
Dengan mengatur pulsa tersebut kita akan dapat mngendalikan kecepatan motor brgitu pula untuk menentukan arah putaran motor
Gambar 3.16 Pemograman Motor DC Dengan Motor Driver L298
Untuk menggerakan satu buah motor dc, ic L298 membutuhkan 3 pin pengontrol. Ketiga pin itu adalah, dua buah pin untuk arah putaran motor, dan sati pin untuk kecepatan motor. Program diatas menjelaskan fungsi untuk menggerakan satu buah motor. Dengan fungsi program ini penulis dapat dengan mudah mengontrol satuh buah motor karena hanya mengisi nilai pwm (kecepatan) dan arah motor.
3.4.3 Pemrograman Bluetooth HC-06
Pada Tugas Akhir ini komunikasi bluetooth digunakan untuk komunikasi dua arah antara robot dengan telepon genggam. Penggunaan komunikasi bluetooth
untuk kedua perangkat ini kurang lebih sama. Pada telepon genggam untuk memulai suatu koneksi, maka pertama yang harus dilakukan adalah mengaktifkan fasilitas bluetooth terlebih dahulu. Kemudian dilanjutkan dengan pencarian (inquiry) sinyal bluetooth dari perangkat lain. Apabila telepon genggam berada dalam jangkauan pancaran sinyal bluetooth oleh perangkat lain dan perangkat tersebut memiliki layanan (service) yang diinginkan, maka dapat dibangun koneksi ke perangkat tersebut. Berikut adalah gambar pemrograman Bluetooth HC-06.
Gambar 3.17 Pemrograman Bluetooth HC-06 3.5 Eclipse Software (ADT Software)
Aplikasi yang digunakan untuk sistem kendali robot menggunakan program yang dibuat pada software eclipse. Terdapat 3 bagian penting dalam program eclipse yaitu file yang berkestensi .java pada folder src, file yang berkestensi .xml pada folder layout dan android manifest (sebagai pendukung module seperti launcher, koneksi Bluetooth dan lainnya). R.java adalah file penghubung antara file yang yang berekstensi .java (pada folder src) dengan file
yang berekstensi .xml (pada folder layout). R.java yang terdapat pada folder gen. apabila R.java tidak ada maka aplikasi yang dibuat tidak akan berjalan karena penghubung antara file .java dengan file.xml tidak ada. Semua interface yang telah dibuat pada folder .xml akan dipanggil pada file .java.
Pada program sistem kendali ini dibuat beberapa buah file .java yaitu; ActivityMain.java, yang kemudian memanggil file main.xml sebagai menu utama yang ditampilkan sebagai berikut.
Gambar 3.18 Program ActivityMain.java
File ActivityMain.java akan memanggil file activitymain.xml sebagai interfacenya. Seperti yang ditunjukan pada gambar 3.18 dibawah ini.