M. NAUFAL RAUF IBRAHIM
DEPARTEMEN TEKNIK MESIN DAN BIOSISTEM FAKULTAS TEKNOLOGI PERTANIAN
INSTITUT PERTANIAN BOGOR BOGOR
2015
DESAIN SISTEM KONTROL OTOMATIK LARUTAN NUTRISI
BERBASIS ELECTRICAL CONDUCTIVITY UNTUK BUDIDAYA
PERNYATAAN MENGENAI SKRIPSI DAN
SUMBER INFORMASI SERTA PELIMPAHAN HAK CIPTA
Dengan ini saya menyatakan bahwa skripsi berjudul Desain Sistem Kontrol Otomatik Larutan Nutrisi Berbasis Electrical Conductivity untuk Budidaya Hidroponik Menggunakan Logika Fuzzy adalah benar karya saya dengan arahan dari Dosen Pembimbing Akademik dan belum diajukan dalam bentuk apa pun kepada perguruan tinggi mana pun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir skripsi ini.Dengan ini saya melimpahkan hak cipta dari karya tulis saya kepada Institut Pertanian Bogor.
Bogor, Januari 2015
M. Naufal Rauf Ibrahim
ABSTRAK
M. NAUFAL RAUF IBRAHIM. Desain Sistem Kontrol Otomatik Larutan Nutrisi Berbasis Electrical Conductivity untuk Budidaya Hidroponik Menggunakan Logika Fuzzy. Dibimbing oleh MOHAMAD SOLAHUDIN dan SLAMET WIDODO.
Nilai electrical conductivity (EC) larutan nutrisi pada budidaya hidroponik sangat menentukan tingkat pertumbuhan dan kualitas panen tumbuhan. Maka dari itu dibutuhkan sistem kontrol larutan nutrisi yang mampu mengontrol nilai EC yang sesuai. Tujuan dari penelitian ini adalah merancang sistem kontrol nutrisi yang mampu mempertahankan dan mengontrol nilai EC dengan menggunakan teknologi Ardunio sebagai microcontroller. Model budidaya tomat berdasarkan referensi disimulasikan dengan masa budidaya yang dipercepat 1:1440 dan volume larutan nutrisi yang diperkecil 1:25. Rancangan simulasi penurunan nilai EC dengan penambahan air dapat mengikuti pola penurunan nilai EC penyerapan nutrisi oleh model. Simulasi matematis dengan penggunaan inferensi fuzzy
menunjukkan sistem mampu mengontrol nilai EC pada setpoint referensi. Hasil simulasi matematis digunakan sebagai sebagai acuan untuk simulasi aktual. Hasil simulasi aktual mampu mengikuti pola kecenderungan penurunan EC simulasi matematis dengan lag 24 detik ketika perubahan setpoint dari 1.7 mS/cm ke 1.6 mS/cm dan lag 35 detik ketika perubahan setpoint dari 1.6 mS/cm ke 1.9 mS/cm. Metode MAPE digunakan untuk memvalidasi simulasi. Hasil validasi MAPE memperlihatkan nilai error simulasi sebesar 0.336% dan menunjukkan bahwa hasil simulasi dapat diterima.
Kata kunci: EC, fuzzy, MAPE, simulasi, sistem kontrol
ABSTRACT
M NAUFAL RAUF IBRAHIM. Design of Automatic Control System for Hydroponic Culture Based on Electrical Conductivity using Fuzzy Logic. Supervised by MOHAMAD SOLAHUDIN and SLAMET WIDODO.
Electrical conductivity (EC) of nutrient solution on hydroponic culture is a crucial point that determines the growth rate of the plants and quality of the products. The purpose of this research is to design the control system for nutrient solution to maintain and control the EC of nutrient solution using Arduino technology as a microcontroller. Model of tomato cultivation based on certain reference from the previous research was simulated with scale 1:1440 for cultivation time and 1:25 for initial nutrient solution. The result of EC declining rate simulation by adding water compared to the EC declining rate due to nutrient uptake of the model is showing good agreement. The result of the mathematical simulation of control system using fuzzy inference shows that the system can control EC of the nutrient solution based on the setpoints from the reference. Based on this mathematical simulation the performance of the actual simulation is measured. The result of the actual simulation can follow the mathematical simulation as expected. The actual simulation has lag 24 seconds when the
setpoint changes from 1.7 mS/cm to 1.6 mS/cm and 35 seconds lag when setpoint changes from 1.6 mS/cm to 1.9 mS/cm. Using MAPE validation the simulation has error 0.336% and the result of simulation can be accepted.
Skripsi
sebagai salah satu syarat untuk memperoleh gelar Sarjana Teknik
pada
Departemen Teknik Mesin dan Biosistem
M. NAUFAL RAUF IBRAHIM
DEPARTEMEN TEKNIK MESIN DAN BIOSISTEM FAKULTAS TEKNOLOGI PERTANIAN
INSTITUT PERTANIAN BOGOR BOGOR
2015
DESAIN SISTEM KONTROL OTOMATIK LARUTAN NUTRISI
BERBASIS ELECTRICAL CONDUCTIVITY UNTUK BUDIDAYA
PRAKATA
Puji dan syukur penulis panjatkan kepada Allah subhanahu wa ta’ala atas segala karunia-Nya sehingga skripsi ini berhasil diselesaikan. Tema yang dipilih dalam penelitian yang dilaksanakan sejak bulan Februari 2014 sampai September 2014 ini ialah sistem kontrol, dengan judul Desain Sistem Kontrol Otomatik Larutan Nutrisi Berbasis Electrical Conductivity Untuk Budidaya Hidroponik Menggunakan Logika Fuzzy.
Terima kasih penulis ucapkan kepada Bapak Dr Ir Mohamad Solahudin, MSi dan Bapak Dr Slamet Widodo, STP, MSc selaku pembimbing, serta Supriyanto, STP, MKom dan Dr Liyantono STP, MAgr yang telah banyak memberi saran dan bantuan. Ungkapan terima kasih juga disampaikan kepada ayah, ibu, serta seluruh keluarga, atas segala doa dan kasih sayangnya, dan rekan-rekan yang telah membantu dalam penyelesaian penelitian dan penulisan skripsi ini.
Semoga tulisan ini bermanfaat.
Bogor, Januari 2015
DAFTAR ISI
DAFTAR TABEL vi DAFTAR GAMBAR vi DAFTAR LAMPIRAN v PENDAHULUAN 1 Latar Belakang 1 Tujuan Penelitian 1Ruang Lingkup Penelitian 2
TINJAUAN PUSTAKA 2
Nutrient Film Technique (NFT) 2
Larutan Nutrisi dan Konduktivitas Listrik (EC) 3
Nutrient Uptake (Serapan Nutrisi) pada Tanaman Tomat 4
Logika Fuzzy 5
METODE PENELITIAN 8
Alat dan Bahan Penelitian 8
Prosedur Penelitian 8
HASIL DAN PEMBAHASAN 13
Perancangan Simulasi 13
Simulasi 21
SIMPULAN DAN SARAN 27
Simpulan 27
Saran 27
DAFTAR PUSTAKA 28
LAMPIRAN 30
DAFTAR TABEL
1 Kandungan nutrisi AB mix 3
2 Hasil pengamatan debit pompa 14
3 Lama penyalaan pompa untuk simulasi penurunan nilai EC 16 4 Matriks keputusan untuk output waktu penyalaan pompa 19
DAFTAR GAMBAR
1 Skema sistem NFT untuk budidaya tanaman 3
2 Nilai EC yang diatur selama masa budidaya 4
3 Model fungsi keanggotaan (kiri) segitiga (kanan) trapesium 5 4 Pendekatan crisp (kiri) dan fuzzy (kanan) dalam membedakan usia 6
5 Fungsi implikasi Min 6
6 Proses defuzzifikasi dengan metode centroid 7 7 Skema sistem kontrol simulasi fuzzy aktual 11
8 Diagram alir prosedur penelitian 12
9 Hasil kalibrasi sensor EC 13
10 Hubungan konsentrasi larutan dengan nilai EC 14 11 Model penurunan nilai EC akibat serapan kadar NO3 15 12 Air yang dibutuhkan per menit untuk simulasi 16
13 Simulasi penurunan nilai EC dengan pompa 17
14 Sistem inferensi fuzzy untuk sistem kontrol 18
15 Himpunan fuzzyerror EC (mS/cm) 18
16 Himpunan fuzzy volume (liter) 18
17 Himpunan fuzzy lama waktu penyalaan pompa (detik) 20
18 Proses defuzzifikasi dengan MATLAB 20
19 Diagram alir proses perhitungan pada simulasi kontrol fuzzy
matematis sistem 21
20 Hasil simulasi kontrol fuzzy matematis sistem 22 21 Skema aliran data pada simulasi kontrol fuzzy aktual 23 22 Tampilan serial monitor ketika pengamatan 23 23 Hasil pengamatan simulasi aktual yang dibandingkan dengan
referensi dan simulasi matematis 24
24 Nilai error EC simulasi aktual terhadap simulasi matematis 24 25 Nilai inferensi fuzzy selama simulasi aktual 25 26 Lama penyalaan pompa AB mix selama simulasi aktual 25 27 Lama penyalaan pompa air selama simulasi aktual 25
DAFTAR LAMPIRAN
1 Hasil dan contoh perhitungan 30
2 Gambar alat dan bahan 33
3 Model penurunan nilai EC dan penambahan air untuk simulasi
penurunan nilai EC 34
PENDAHULUAN
Latar Belakang
Menurut Pusat Kajian Hortikultura Tropika (2013) saat ini permintaan produk hortikultura semakin meningkat. Konsumsi sayur dan buah Indonesia mengalami peningkatan yakni pada tahun 2005 sebesar 60.50 kg per kapita per tahun, tahun 2008 sebesar 71.38 kg per kapita per tahun dan tahun 2011 sebesar 145.44 kg per kapita per tahun. Salah satu cara untuk menghasilkan produk holtikultura yang berkualitas tinggi secara berkelanjutan dengan kuantitas yang tinggi per tanamannya adalah budidaya dengan sistem hidroponik. Nutrient Film Technique (NFT) adalah salah satu teknik budidaya pada sistem hidroponik. Larutan nutrisi dialirkan ke akar tanaman yang terekspos ke dalam bak dan larutan tersebut disirkulasi pada teknik budidaya NFT.
Konsentrasi larutan nutrisi merupakan salah satu parameter yang menentukan kualitas dan hasil panen tanaman (Trejo-Téllez dan Gómez-Merino 2012). Konsentrasi larutan menyatakan jumlah larutan nutrisi yang terkandung dalam air dan nilai tersebut berubah-ubah diakibatkan perbedaan serapan nutrisi dan air oleh tanaman. Konsentrasi larutan nutrisi tersebut direpresentasikan dengan nilai electrical conductivity (EC) (Arif 2008). Menurut Whipker dan Cavins (2000) nilai EC larutan nutrisi yang terlalu tinggi mengakibatkan tanaman tumbuh lambat dan biaya produksi yang tinggi. Sebaliknya, konsentrasi larutan nutrisi yang terlalu rendah akan menyebabkan produktivitas tanaman menurun. Maka dari itu, perlu adanya usaha dalam mengontrol konsentrasi larutan tersebut agar hasil budidaya dari teknik NFT dapat mencapai tingkat maksimal.
Penggunaan teknologi microcontroller Arduino dipilih karena mempunyai keunggulan tertentu yang tidak dimiliki microcontroller lain. Salah satu keunggulannya adalah harganya yang lebih murah, koneksi dengan komputer yang menggunakan USB, cross-platform yaitu dapat digunakan di berbagai
operating system (Windows, Macintosh OSX, Linux, Raspbian, dll), dan open source (software maupun hardwarenya) sehingga dengan menggunakan Arduino, sistem dapat diarahkan menjadi sistem yang fleksibel dan murah(Hirzel 2011).
Sistem kontrol otomatik yang dirancang pada penelitian ini mempunyai kemampuan mengatur konsentrasi nutrisi pada teknik budidaya hidroponik NFT secara kontinu berdasarkan model penyerapan nutrisi tanaman. Nilai konsentrasi yang dipertahankan pada tingkat optimum diharapkan mampu memberikan produktivitas tanaman yang maksimal.
Tujuan Penelitian
Tujuan dari penelitian ini adalah:
1. Mendesain suatu sistem kontrol otomatik berbasis nilai electrical conductivity (EC) yang mampu mengatur konsentrasi larutan pada
setpoint yang telah ditentukan menggunakan microcontroller Arduino. 2. Mensimulasikan penyerapan nutrisi pada tanaman tomat dengan masa
budidaya 9 minggu.
2
Ruang Lingkup Penelitian
Penelitian ini memiliki ruang lingkup pada perancangan sistem kontrol otomatik larutan nutrisi berbasis nilai EC untuk budidaya NFT dengan
microcontroller Arduino. Sistem kontrol ini dirancang berdasarkan model laju penyerapan nutrisi pada masa budidaya tanaman tomat selama 9 minggu yang kemudian disimulasikan dengan masa budidaya dipercepat menjadi 1 jam. Logika pengambilan keputusan dari sistem ini menggunakan logika fuzzy dengan input
nilai perbedaan antara nilai EC setpoint dengan nilai EC aktual dan volume tangki nutrisi. Output dari sistem ini adalah lama penyalaan pompa air dan pompa larutan nutrisi AB mix.
TINJAUAN PUSTAKA
Budidaya Hidroponik Nutrient Film Technique (NFT)
Budidaya hidroponik adalah metode penanaman tanaman tanpa menggunakan media tumbuh dari tanah (Rosliani dan Sumarni 2005). Menurut Prihmantoro dan Indiriani (2005) hidroponik mulai dilirik dan berkembang sejak tahun 1925 setelah didapati bahwa sistem ini mempunyai potensi untuk digunakan oleh industri tanaman karena dapat mengatasi masalah keterbatasan lahan, kesuburan tanah, dan serangan hama penyakit.
Salah satu metode budidaya hidroponik adalah Nutrient Film Technique
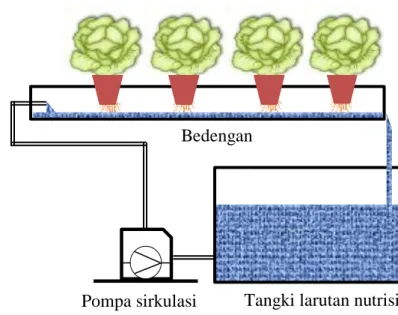
(NFT). Budidaya hidroponik NFT pertama kali dikembangkan oleh Allen Cooper pada tahun 1970 di Inggris dengan tujuan untuk meningkatkan produktivitas sayuran sepanjang tahun (Winsor et al. 1979). Lapisan tipis larutan nutrisi mengalir melalui bedengan atau talang yang berisi akar-akar tanaman pada sistem ini. Larutan bersirkulasi secara terus menerus selama 24 jam atau diatur pada waktu-waktu tertentu dengan pengatur waktu. Sebagian akar tanaman terendam dalam larutan nutrisi tersebut, sebagian lagi berada di atas permukaan larutan. Lingkungan akar yang ideal merupakan faktor penting dalam peningkatan produksi tanaman (Rosliani dan Sumarni 2005).
Menurut Suhardiyanto (2010) NFT memiliki karakteristik, bahwa akar tanaman berada di udara dan larutan nutrisi sekaligus. Sebagian akar berada pada ruang udara dalam saluran sehingga dapat menyerap oksigen, sebagian yang lain terendam dalam larutan nutrisi sehingga dapat menyerap nutrisi dan air yang diperlukan tanaman. Saluran yang diletakkan dengan kemiringan tertentu memungkinkan larutan nutrisi mengalir sampai ujung saluran dan ditampung kembali dalam tangki. Larutan nutrisi disirkulasikan terus menerus secara tertutup pada sistem ini.
3
Larutan Nutrisi dan Konduktivitas Listrik (EC)
Konsentrasi larutan nutrisi yang sesuai dengan tanaman sangat diperlukan untuk mencapai tingkat pertumbuhan dan produksi tanaman maksimal. Sistem hidroponik tertutup seperti NFT, larutan nutrisi disirkulasikan ke akar tanaman dan pada saat itulah terjadi penyerapan air dan nutrisi oleh tanaman. Penyerapan nutrisi tanaman pada setiap sirkulasi akan mempengaruhi tingkat konsentrasi larutan nutrisi. Salah satu hara yang digunakan dalam hidroponik adalah AB mix
(fertimix). AB mix dikemas dalam bentuk paket yang terbagi menjadi 2 jenis, yaitu A dan B dalam bentuk padat (kristal dan bubuk) (Mairusmianti 2011). Sebelum diaplikasikan ke tanaman, pupuk tersebut harus dicampurkan ke air dan diaplikasikan sebagai larutan nutrisi. Kandungan nutrisi AB mix terdapat pada Tabel 1.
Tabel 1 Kandungan nutrisi AB mix
Nutrisi (Ion) Kandungan nutrisi (%) Kalsium (Ca) Nitrogen (NO3) Kalium (K2O) Fosfat (P2O5) Sulfat (S) Magnesium (Mg) Fe EDTA Boron (B) Mangan (Mn) Zinc (Zn) Copper (Cu) Molybdate (Mo) 8.300 9.900 16.500 9.900 6.600 2.800 0.040 0.010 0.010 0.010 0.009 0.009 Sumber: CV. Agrifam, tertera dalam kemasan AB mix
Gambar 1 Skema sistem NFT untuk budidaya tanaman Tangki larutan nutrisi Pompa sirkulasi
4
Salah satu metode untuk mengukur konsentrasi larutan nutrisi adalah dengan mengukur konduktivitas elektrik (EC) (Roberto 2003). Nilai EC menyatakan konsentrasi nutrisi atau nutrisi dalam air juga menyatakan kecocokan larutan nutrisi untuk tanaman. Unsur-nutrisi yang terlarut dalam air berupa ion bermuatan positif (kation) dan ion bermuatan negatif (anion). Keberadaan ion-ion tersebut yang memungkinkan konduktivitas listrik dalam larutan nutrisi dapat terukur oleh sensor EC. Satuan EC yang digunakan adalah mili-Siemens per centimeter atau mS/cm (Sutiyoso 2008).
Nilai EC pada Budidaya Tanaman Tomat
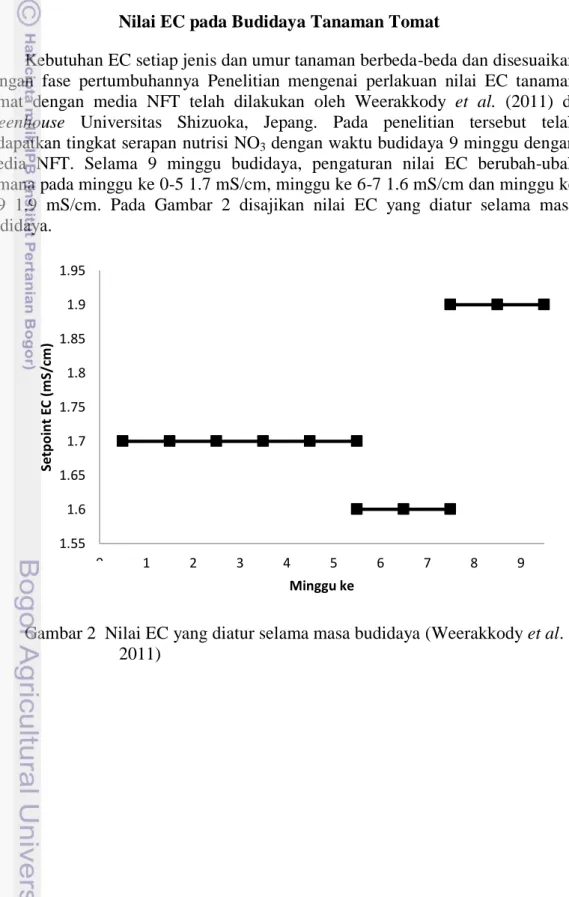
Kebutuhan EC setiap jenis dan umur tanaman berbeda-beda dan disesuaikan dengan fase pertumbuhannya Penelitian mengenai perlakuan nilai EC tanaman tomat dengan media NFT telah dilakukan oleh Weerakkody et al. (2011) di
greenhouse Universitas Shizuoka, Jepang. Pada penelitian tersebut telah didapatkan tingkat serapan nutrisi NO3 dengan waktu budidaya 9 minggu dengan media NFT. Selama 9 minggu budidaya, pengaturan nilai EC berubah-ubah dimana pada minggu ke 0-5 1.7 mS/cm, minggu ke 6-7 1.6 mS/cm dan minggu ke 8-9 1.9 mS/cm. Pada Gambar 2 disajikan nilai EC yang diatur selama masa budidaya.
Gambar 2 Nilai EC yang diatur selama masa budidaya (Weerakkody et al. 2011) 1.55 1.6 1.65 1.7 1.75 1.8 1.85 1.9 1.95 0 1 2 3 4 5 6 7 8 9 Se tp oi n t EC ( m S/ cm ) Minggu ke
5
Logika Fuzzy
Logika fuzzy adalah suatu cara yang tepat untuk memetakan suatu ruang
input ke dalam suatu ruang output, mempunyai nilai kontinu. Fuzzy dinyatakan dalam derajat dari suatu keanggotaan dan derajat dari kebenaran. Oleh sebab itu sesuatu dapat dikatakan sebagian benar dan sebagian salah pada waktu yang sama dalam logika fuzzy (Kusumadewi 2002).
Sistem inferensi fuzzy merupakan suatu proses pengambilan keputusan dengan menggunakan logika fuzzy. Proses yang terjadi yaitu memetakan nilai
input ke dalam nilai output. Metode-metode yang dapat digunakan dalam sistem inferensi fuzzy antara lain Metode Tsukamoto, Mamdani dan Sugeno. Metode Mamdani disebut juga Metode Min-Max. Metode ini diperkenalkan oleh Ebrahim Mamdani pada tahun 1975 (Kusumadewi dan Purnomo 2004). Logika fuzzy
memerlukan 4 tahapan untuk mendapatkan output, yaitu fuzzifikasi, fungsi implikasi, komposisi aturan, dan defuzzifikasi.
Fuzzifikasi
Fuzzifikasi adalah proses penentuan sebuah bilangan input masing-masing himpunan fuzzy. Himpunan fuzzy merupakan suatu grup yang wewakili suatu kondisi atau keadaan tertentu dalam suatu variable fuzzy. Variabel fuzzy
merupakan variabel yang hendak dibahas dalam suatu sistem fuzzy. Fungsi keanggotaan adalah suatu kurva yang menunjukan pemetaan titik-titik input data ke dalam nilai keanggotaannya. Nilai dari fungsi keanggotaan disebut dengan derajat keanggotaan yang memiliki interval antara 0 sampai 1. Derajat keanggotaan diperoleh melalui pendekatan fungsi. Beberapa fungsi yang dapat digunakan yaitu representasi linier, kurva segitiga, dan trapesium. Representasi kurva dapat dibedakan berdasarkan fungsi keanggotaan yaitu linier dan
polynomial, seperti pada Gambar 3.
Himpunan fuzzy memiliki 2 atribut yaitu linguistik dan numerik. Linguistik adalah penamaan suatu grup yang mewakili suatu keadaan atau kondisi tertentu dengan menggunakan bahasa alami. Numeris yaitu suatu nilai (angka) yang menunjukan ukuran dari suatu variabel. Nilai keanggotaan suatu x dalam suatu himpunan A pada himpunan crisp (himpunan yang memiliki batas yang jelas), yang sering ditulis dengan µA(x), hanya memiliki 2 kemungkinan menjadi anggota himpunan tersebut atau tidak sama sekali anggota himpunan tersebut. Perbedaan pendekataan crisp dengan fuzzy dapat dilihat pada Gambar 4.
µ(x) 1 0 x µ(x) 0 1 x Gambar 3 Model fungsi keanggotaan (kiri) segitiga (kanan) trapesium
6
Fungsi Implikasi
Tiap-tiap aturan pada basis pengetahuan fuzzy akan berhubungan dengan suatu relasi fuzzy. Basis pengetahuan fuzzy terdiri dari basis data dan basis aturan. Basis data berisi nilai linguistik dan derajat keanggotan variabel input yang diperoleh melalui proses fuzzifikasi. Basis aturan terdiri dari aturan kendali fuzzy
yang digunakan untuk mencapai tujuan dari objek pengendalian. Basis aturan pengendalian dibuat berdasarkan proses penalaran operator atau ahli dengan melibatkan unsur pengalaman. Aturan kendali fuzzy mengekspresikan hubungan antara variabel input dengan variabel output (Subrata 2009).
Bentuk umum aturan kendali fuzzy yang digunakan dalam fungsi implikasi adalah IF x is A THEN y is B dengan x dan y adalah skalar, A dan B adalah himpunan fuzzy. Aturan yang mengikuti IF disebut sebagai anteseden, sedangkan proposisi yang mengikuti THEN disebut sebagai konsekuen. Aturan ini dapat diperluas dengan menggunakan operator fuzzy dalam bentuk logika IF THEN di bawah ini
IF (x1 is A1) and (x2 is A2) and… and (xn is An) THEN y is B
Salah satu fungsi implikasi yang dapat digunakan adalah implikasi Min
(minimum). Fungsi ini akan memotong output himpunan fuzzy (Irfani 2011). Gambar 5 merupakan contoh bagaimana fungsi implikasi Min berjalan.
µ(x) 1 0 x µ(x) 1 0 x Muda Parobaya Tua Muda Parobaya Tua
Gambar 4 Pendekatan crisp (kiri) dan fuzzy (kanan) dalam membedakan usia
Gambar 5 Fungsi implikasi Min Aplikasi operator AND Fungsi implikasi Min A1 A2 B x1 x2 y
7
Komposisi Aturan
Komposisi aturan berisi aturan-aturan yang berhubungan dan dinyatakan dalam bentuk matriks keputusan. Komposisi aturan merupakan formulasi yang mendasari pengambilan keputusan apabila sistem terdiri dari beberapa aturan, maka inferensi diperoleh dari korelasi antar aturan (Kusumadewi dan Purnomo 2004).
Defuzzifikasi
Defuzzifikasi merupakan suatu proses yang mengkombinasikan seluruh
fuzzy output menjadi sebuah hasil spesifik. Proses ini merupakan kebalikan dari
fuzzifikasi, dimana nilai keanggotaan dari suatu himpunan fuzzy dikonversikan ke dalam suatu bilangan real. Pada komposisi aturan Mamdani, salah satu metode yang dapat digunakan adalah metode centroid (Irfani 2011). Proses defuzzifikasi
dijelaskan pada Gambar 6.
Metode ini menghasilkan solusi dengan mengambil titik pusat daerah fuzzy. Secara umum dapat dirumuskan:
Z =
∑n (
∑n ( (1)
Keterangan:
Z = Keputusan (solusi fuzzy)
Zj = Interval diskrit pada himpunan semesta Z atau posisi pusat sistem
output
µ(Zj) = Nilai keanggotaan solusi fuzzy atau luasan tiap fuzzy output
Gambar 6 Proses defuzzifikasi dengan metode centroid
Daerah fuzzy output M Daerah fuzzy output N Daerah fuzzy output gabungan Centroid (nilai keputusan)
8
METODE PENELITIAN
Waktu dan Tempat Penelitian
Penelitian dilaksanakan pada bulan April – September 2014 di Laboratorium Teknik Bioinformatika dan Laboraturim Manufaktur, Departemen Teknik Mesin dan Biosistem, Fakultas Teknologi Pertanian, Institut Pertanian Bogor.
Alat dan Bahan Penelitian
Alat yang digunakan pada penelitian ini adalah 2 unit microcontroller
Arduino, seperangkat komputer untuk proses pemrograman, sensor EC Atlas Scientific K1, sensor ultrasonik HC-SR04, rangkaian relay 4 channel, EC meter, gelas ukur, 4 pompa air, 4 tangki air (nutrisi A dan B, air, campuran). Software
yang digunakan meliputi Arduino IDE 1.0.5, MATLAB R2014a, dan Microsoft Excel. Bahan yang digunakan adalah nutrisi yang berupa campuran larutan nutrisi AB mix. Gambar alat dan bahan dapat dilihat pada Lampiran 2.
Prosedur Penelitian
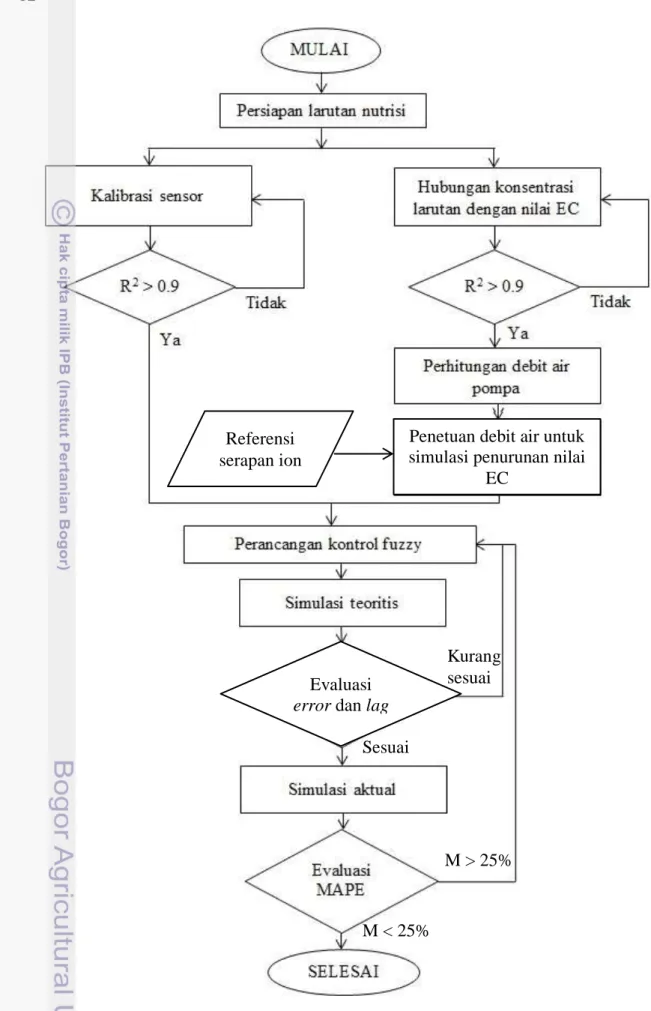
Penelitian dilakukan dengan tiga tahap, yaitu tahap penyiapan larutan nutrisi, tahap perancangan simulasi dan simulasi. Perancangan simulasi meliputi kalibrasi sensor, mencari hubungan konsentrasi larutan dengan nilai EC, penentuan debit air untuk simulasi penurunan nilai EC, perhitungan debit pompa dan perancangan kontrol fuzzy sedangkan pada simulasi meliputi simulasi matematis sistem dan simulasi aktual sistem.
Persiapan Larutan Nutrisi
Larutan nutrisi yang digunakan di penelitian ini sebelumnya dalam bentuk padatan sehingga perlu dilarutkan dengan air untuk menjadi larutan nutrisi. Pencampuran dilakukan dengan 2 tahap:
1. Tahap I
Padatan A dan B masing-masing dilarutkan ke dalam air sampai 1 liter sehingga total AB mix menjadi 2 liter larutan.
2. Tahap II
Larutan A dan B yang telah dibuat pada tahap I masing-masing diencerkan ke dalam air sampai 10 liter sehingga total menjadi 20 liter larutan. Larutan AB
mix inilah yang digunakan pada perancangan simulasi dan simulasi.
Perancangan Simulasi
1. Kalibrasi sensor
Metode kalibrasi sensor yang digunakan adalah membandingkan nilai keluaran sensor (sensor EC) dengan alat ukur (EC meter). Larutan AB mix
dengan nilai EC yang berbeda-beda diukur masing-masing dengan sensor dan alat ukur, kemudian hubungan antara nilai keluaran sensor dengan alat ukur dapat diketahui dengan membuat regresi linear dengan sumbu y-nya adalah
9 nilai keluaran alat ukur dan sumbu x-nya adalah nilai keluaran sensor. Persamaan tersebut layak dipakai jika koefisien determinasi (R2) lebih besar dari 0.9
(2)
Keterangan:
y = Nilai keluaran alat ukur sebagai acuan (µS/cm)
x = Nilai keluaran sensor (µS/cm)
a, b = Konstanta
2. Hubungan konsentrasi larutan dengan nilai EC
Hubungan konsentrasi larutan dengan nilai EC dapat diketahui dengan dengan membandingkan konsentrasi larutan dengan nilai EC dan membuat regresi linear dengan sumbu y adalah nilai EC dan sumbu x adalah nilai konsentrasi larutan. Persamaan hubungan konsentrasi larutan dengan nilai EC menggunakan Persamaan 2.
3. Perhitungan debit pompa
Pompa yang digunakan pada penelitian ini mempunyai 2 tujuan, yaitu pompa untuk penurunan nilai EC dan pompa untuk pengendalian nilai EC dalam larutan. Debit pompa dapat dihitung dengan rumus:
(3)
Keterangan:
Q = Debit pompa (ml/s)
V = Volume pada saat t (ml)
t = Waktu bukaan pompa (s)
4. Penentuan debit air untuk simulasi penurunan nilai EC
Penurunan nilai EC dari serapan unsur oleh tanaman dapat direpresentasikan dalam penurunan konsentrasi larutan nutrisi AB mix. Penurunan konsentrasi terjadi akibat berkurangnya nutrisi dapat dimodelkan dengan penambahan air. Sebelum menentukan debit air untuk simulasi penurunan nilai EC, perlu diketahui serapan kadar nutrisi tertentu dalam ml/hari agar penurunan nilai EC dimodelkan. Persamaan untuk mendapatkan nilai serapan nutrisi dalam ml/hari dapat dilihat pada Persamaan 4.
Um
=
( x )( xp )
x (4)
Keterangan:
Um = Serapan nutrisi (ml/hari)
U = Serapan nutrisi (mg/tanaman/hari)
N = Jumlah tanaman model
m = Massa padatan AB mix (mg)
p = Persentase ion dalam AB mix (%)
10
Penambahan air yang dibutuhkan setiap kali waktu penyerapan dapat ditentukan dengan Persamaan 5.
n - -
n
(5)
Keterangan:
Vnm = Volume AB mix model (ml) Vu = Volume serapan (ml) Vtm = Volume total model (ml)
Vns = Volume AB mix simulasi (ml)
Vts = Volume total simulasi (ml)
Vi = Volume air yang ditambahkan (ml)
5. Perancangan kontrol fuzzy
Pada perancangan kontrol fuzzy (fuzzy control), digunakan sistem inferensi Mamdani dan fungsi implikasi Min. Sistem inferensi Mamdani dipilih berdasarkan penelitian sebelumnya oleh Suprijadi et al. (2009) yang mampu mengatur volume nutrisi hidroponik berdasarkan ketinggian larutan dengan menggunakan sistem inferensi Mamdani. Perancangan kontrol fuzzy
dilakukan dengan menggunakan software MATLAB.
Simulasi
1. Simulasi fuzzy matematis sistem
Simulasi matematis dilakukan untuk mengevaluasi sistem kontrol fuzzy
yang telah dibangun dengan perhitungan matematis. Perhitungan simulasi dilakukan dengan menggunakan software Ms. Excel dan MATLAB. Jika simulasi fuzzy matematis sistem telah dianggap baik secara kuantitatif dengan membandingkan hasil simulasi terhadap referensi, maka sistem layak dilakukan simulasi aktual sistem. Nilai parameter yang dilihat adalah nilai
error dan lag selama simulasi. 2. Simulasi fuzzy aktual sistem
Simulasi aktual dilakukan untuk mengetahui respon sistem kontrol
f zzy secara aktual. Evaluasi simulasi dilakukan secara kualitatif dan kuantitatif. Evaluasi secara kualitatif melihat apakah respon sistem menyerupai respon sistem matematis dan evaluasi secara secara kuantitatif dilakukan dengan metode MAPE (Mean Ab ol e Percen age Error). Metode MAPE cocok digunakan untuk mengevaluasi akurasi dari foreca ng dan lebih mudah dipahami karena hasil disajikan dalam persentase (Hyndman dan Koehler 2006).
11 M = n
∑
|
A −F A|
n x 100% (6) Keterangan: M = Nilai MAPE (%) n = Jumlah dataA = Nilai aktual atau simulasi aktual (µS/cm)
F = Nilai foreca ng atau simulasi matematis (µS/cm)
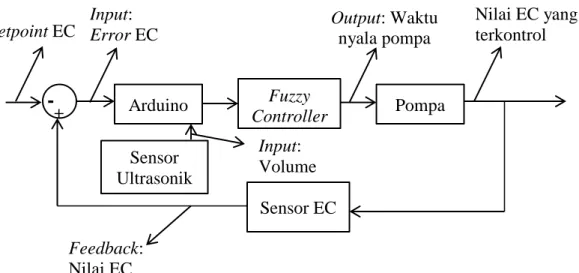
Foreca ng yang dimaksud adalah menvalidasi sistem kontrol dengan membandingkan model sistem yang telah dibuat (Abraham dan Ledolter 2005). Menurut Makridakis et al. (1983), jika nilai MAPE < 25%, maka hasil simulasi dapat diterima secara memuaskan. Skema kontrol f zzy pada simulasi f zzy aktual dapat dilihat pada Gambar 7. Diagram alir kegiatan penelitian keseluruhan dapat dilihat pada Gambar 8.
Gambar 7 Skema sistem kontrol simulasi fuzzy aktual
Arduino Fuzzy Controller Pompa Sensor EC +
-Setpoint EC Input: Error EC Output: Waktu nyala pompa Nilai EC yang terkontrol Feedback: Nilai EC Input: Volume Sensor Ultrasonik
12
Gambar 8 Diagram alir prosedur penelitian Referensi serapan ion Sesuai Kurang sesuai M > 25% M < 25% Evaluasi
error dan lag
Penetuan debit air untuk simulasi penurunan nilai
13
HASIL DAN PEMBAHASAN
Perancangan Simulasi
Kalibrasi sensor
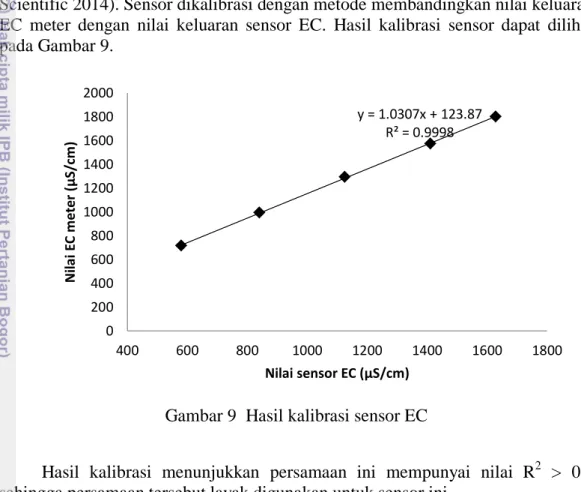
Sensor yang digunakan pada penelitian ini adalah sensor tipe K 1.0 Atlas Scientific dengan jangkauan pembacaan sensor antara 0.5 mS/cm sampai 200 mS/cm dan sensor perlu dikalibrasi terlebih dahulu sebelum digunakan (Atlas Scientific 2014). Sensor dikalibrasi dengan metode membandingkan nilai keluaran EC meter dengan nilai keluaran sensor EC. Hasil kalibrasi sensor dapat dilihat pada Gambar 9.
Gambar 9 Hasil kalibrasi sensor EC
Hasil kalibrasi menunjukkan persamaan ini mempunyai nilai R2 > 0.9 sehingga persamaan tersebut layak digunakan untuk sensor ini.
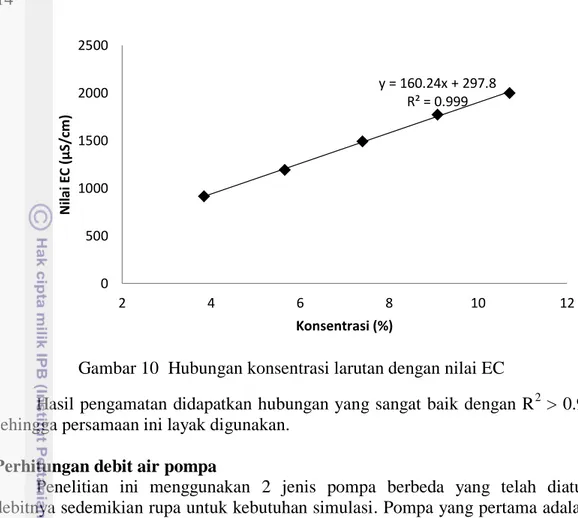
Hubungan konsentrasi larutan dengan nilai EC
Hubungan konsentrasi larutan dengan nilai EC diperlukan dalam penentuan debit air untuk simulasi, perancangan kontrol fuzzy, dan evaluasi simulasi. Nilai EC diterjemahkan ke dalam nilai konsentrasi sehingga dapat diketahui jumlah larutan AB mix yang harus ditambahkan ke dalam larutan nutrisi. Nilai konsentrasi yang dibandingkan adalah yang mencapai sekitar nilai EC 1.7 mS/cm. Hubungan nilai konsentrasi larutan dengan nilai EC dapat dilihat di Gambar 10.
y = 1.0307x + 123.87 R² = 0.9998 0 200 400 600 800 1000 1200 1400 1600 1800 2000 400 600 800 1000 1200 1400 1600 1800 Ni la i E C m e te r (µ S/ cm ) Nilai sensor EC (µS/cm)
14
Gambar 10 Hubungan konsentrasi larutan dengan nilai EC
Hasil pengamatan didapatkan hubungan yang sangat baik dengan R2 > 0.9, sehingga persamaan ini layak digunakan.
Perhitungan debit air pompa
Penelitian ini menggunakan 2 jenis pompa berbeda yang telah diatur debitnya sedemikian rupa untuk kebutuhan simulasi. Pompa yang pertama adalah pompa air Amara P1200 yang digunakan untuk simulasi penurunan nilai EC dan pompa air Aquila P1000 yang digunakan untuk kontrol kadar nutrisi. Debit kedua pompa ini dapat ditentukan dengan Persamaan 3. Hasil pengamatan debit pompa dapat dilihat pada Tabel 2.
Tabel 2 Hasil pengamatan debit pompa Jenis pompa Volume
pengamatan (ml) Waktu pengamatan (detik) Debit (ml/s) AquilaP1000 500 42 11.63 AmaraP1200 500 33 15.15
Penentuan debit air untuk simulasi penurunan nilai EC
Sistem kontrol pada penelitian ini diarahkan untuk dapat mengendalikan tingkat penurunan nilai EC dari budidaya tanaman tomat 9 minggu. Penurunan nilai EC akibat penyerapan oleh tanaman dapat disimulasikan dengan penambahan air, sehingga dapat mempresentasikan penyerapan nutrisi dalam satuan konsentrasi (%).
Simulasi pada penelitian ini menggunakan model budidaya tomat dari referensi dengan 1 tanaman tomat dan larutan nutrisi total (larutan AB mix dan air) 100 liter dengan masa budidaya 60 hari. Referensi nilai EC larutan nutrisi di awal budidaya dimulai dengan nilai EC 1 700 µS/cm atau 1.7 mS/cm. Menggunakan persamaan hubungan konsentrasi dengan nilai EC pada Gambar 10,
y = 160.24x + 297.8 R² = 0.999 0 500 1000 1500 2000 2500 2 4 6 8 10 12 Ni la i E C ( µ S/ cm ) Konsentrasi (%)
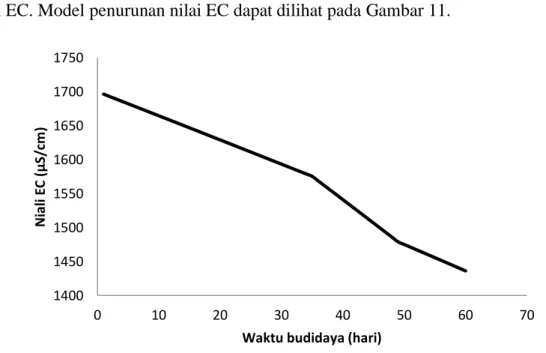
15 dapat ditentukan konsentrasi yang dibutuhkan agar nilai EC larutan mencapai 1.7 mS/cm. Menggunakan persamaan pada Gambar 10, didapatkan nilai konsentrasi yang dibutuhkan sebesar 8.75%. Penurunan nilai EC dapat dimodelkan berdasarkan serapan nutrisi ion tertentu dan untuk model ini dipilih ion NO3. Model penurunan nilai EC akibat serapan kadar NO3 dapat dibuat dengan mengetahui serapan nutrisi referensi dari hasil penelitian Weerakkody et al.
(2011) dalam ml/hari. Proses perhitungan untuk mendapatkan serapan nutrisi AB mix ml/hari dapat dilihat pada Lampiran 1.
Model mempunyai larutan nutrisi total 100 liter dengan konsentrasi AB mix
sebesar 8.75%, sehingga larutan AB mix yang terlarut sebesar 8.75 liter atau 8 750 ml. Penurunan nilai konsentrasi setiap penyerapan dikonversi menjadi penurunan nilai EC. Model penurunan nilai EC dapat dilihat pada Gambar 11.
Grafik pada Gambar 11 digunakan sebagai pembanding apabila larutan nutrisi yang tidak dikontrol dengan larutan nutrisi yang dikontrol oleh sistem kontrol. Serapan nutrisi pada simulasi penurunan EC dianggap sebagai gangguan pada larutan nutrisi yang jika dibiarkan maka nilai EC akan menurun terhadap waktu. Model ini disimulasikan dengan skala waktu yang dipercepat dan larutan nutrisi total yang diperkecil. Skala model:simulasi berturut-turut adalah 1440:1 dengan waktu budidaya 60 hari dipercepat menjadi 60 menit dan 25:1 dengan larutan nutrisi 100 liter diperkecil menjadi 4 liter. Menggunakan Persamaan 5, dapat diketahui air yang dibutuhkan untuk merepresentasikan penurunan nilai EC per menit simulasi. Gambar 12 menunjukkan air yang dibutuhkan per menit dalam simulasi ini. 1400 1450 1500 1550 1600 1650 1700 1750 0 10 20 30 40 50 60 70 Ni al i E C ( µ S/ cm )
Waktu budidaya (hari)
16
Simulasi yang dirancang menggunakan pompa air sebagai alat untuk menyalurkan air yang dibutuhkan per menitnya. Lama waktu penyalaan pompa per menitnya dapat diatur sesuai kebutuhan dengan menggunakan relay. Waktu penyalaan pompa per menit dibuat sama untuk mempermudah pengaturan pompa, dengan pengaturan untuk menit 1-35 (minggu 1-5), menit 36-49 (minggu 6-7), dan menit 50-60 (minggu 8-9) simulasi. Waktu penyalaan pompa didapatkan dari rata-rata debit per menitnya dengan debit pompa AmaraP1200 sebesar 15.15 ml/s. Waktu 0.1 detik ditambahkan pada lama penyalaan pompa untuk mengatasi keterlambatan penyalaan pompa. Lama penyalaan pompa untuk simulasi pada tahap ini dapat dilihat pada Tabel 3.
Tabel 3 Lama penyalaan pompa untuk simulasi penurunan nilai EC
Air yang ditambahkan tersebut merepresentasikan serapan nutrisi yang kemudian menurunkan nilai EC. Simulasi penurunan nilai EC yang dilakukan dengan pompa diuji apakah mampu menyamai tingkat penurunan nilai EC sesuai dengan kecenderungan penurunan pada Gambar 11. Hasil pengujian pompa dapat dilihat pada Gambar 13.
0 5 10 15 20 25 30 0 10 20 30 40 50 60 A ir y an g d ib u tu h ka n ( m l)
Waktu simulasi (menit)
Waktu simulasi (menit) Air yang dibutuhkan (ml/menit) Lama penyalaan pompa (detik) 1-35 11.13 0.835 36-49 25.58 1.788 50-60 16.21 1.170
17
Gambar 13 Simulasi penurunan nilai EC dengan pompa
Atlas Scientific (2014) menyatakan bahwa dibutuhkan 15-25 kali pembacaan untuk sensor membaca yang stabil dengan satu kali pembacaan dibutuhkan waktu 1 detik. Setiap penambahan air per menit, nilai EC larutan mengalami penurunan dan sensor membutuhkan waktu paling cepat 15 detik untuk stabil, sehingga mengakibatkan grafik simulasi tidak stabil. Pengaturan pompa simulasi penurunan nilai EC dapat dikatakan baik karena mampu mengikuti pola dan kecenderungan penurunan EC yang seharusnya.
Perancangan kontrol fuzzy
Sistem kontrol fuzzy pada penelitian dirancang untuk mampu menjaga nilai EC pada setpoint yang di kontrol dari penurunan EC akibat penyerapan nutrisi oleh tanaman. Kontrol fuzzy ini memiliki output nilai penyalaan pompa air atau larutan AB mix dengan 2 jenis input yaitu error EC dan volume larutan pada tangki dalam satuan liter. Pemilihan himpunan fuzzy pada error EC berdasarkan
trial and error, sedangkan pada volume berdasarkan kapasitas tangki simulasi. Gambar 14 menjelaskan tentang sistem inferensi fuzzy yang telah dirancang untuk sistem kontrol dan Gambar 15 dan 16 merupakan batas-batas himpunan fuzzy
untuk error EC dan volume.
1.4 1.45 1.5 1.55 1.6 1.65 1.7 1.75 0 1000 2000 3000 4000 Ni la i E C ( m S/ cm )
Waktu simulasi (detik)
18
Nilai input EC didapatkan dari sensor EC K1.0 Atlas Scientific dan input
volume didapatkan dari sensor ultrasonik. Nilai volume dapat ditentukan jika diketahui penampang alas dari tangki tersebut dan ketinggian sensor ultrasonik terhadap permukaan air. Tangki yang digunakan menyerupai kerucut terpenggal atau corong dengan penampang atas lebih luas dari penampang bawah, sehingga dengan menggunakan prinsip integral dapat ditentukan persamaannya (Anonim 2014).
Gambar 14 Sistem inferensi fuzzy untuk sistem kontrol
Gambar 15 Himpunan fuzzyerror EC (mS/cm)
Gambar 16 Himpunan fuzzy volume (liter) Fungsi implikasi Min Komposisi aturan Mamdani Himpunan fuzzy volume Himpunan fuzzy error EC Fuzzifikasi Himpunan fuzzy
lama nyala pompa
Defuzzifikasi metode centroid 0 0.5 1 -0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5 LN N Z P LP 0 0.5 1 3 4 5 6 7 8 9 10 E M F
19 ∫ ( ( )) (7) Keterangan:
V = Volume (cm3)
b = Tinggi titik muka air (cm)
a = Tinggi permukaan tangki terhadap tanah (cm)
f(x) = Persamaan gradient
Menggunakan perhitungan di atas, didapatkan persamaan mencari volume dalam satuan liter dari ketinggian muka air adalah π[(0.005x3 + 1.334x2 + 110.25x – 66.63)/1 000] dalam liter dengan x adalah nilai jarak dari sensor ultrasonik sampai permukaan air. Implikasi yang digunakan berbentuk IF error EC „x mS/cm‟ AND volume „y liter‟ THEN penyalaan pompa „z detik‟. Proses fungsi implikasi sistem menggunakan sistem Min dan dipilih derajat keanggotaan yang paling rendah dari derajat keanggotaan error EC dan volume.
Komposisi aturan dibuat berdasarkan tujuan yang ingin dicapai yaitu waktu penyalaan pompa yang sesuai. Terdapat 13 aturan untuk pengambilan keputusan waktu penyalaan pompa berdasarkan error EC dan volume larutan pada tangki. Komposisi aturan sistem disajikan pada Tabel 5.
Tabel 4 Matriks keputusan untuk output waktu penyalaan pompa
Keterangan:
EEC = Error EC E = Empty
VOL = Volume M = Medium
LN = Large Negative F = Full
N = Negative QAB = Quick AB
Z = Zero MAB = Moderate AB
P = Positive LAB = Long time AB
LP = Large Positive QW = Quick Water MW = Moderate Water LW = Long time Water
Hasil aturan komposisi tersebut diterjemahkan dalam bentuk output yang terpilih. Himpunan output sistem kontrol fuzzy dapat dilihat pada Gambar 17.
EEC
E M F
LN QAB MAB LAB
N QAB QAB MAB
Z Z Z Z
P QW QW MW
LP QW MW LW
20
Gambar 18 Proses defuzzifikasi dengan MATLAB Gambar 17 Himpunan fuzzy lama waktu penyalaan pompa (detik)
Metode yang dipilih untuk proses defuzzifikasi adalah metode titik pusat luasan (centroid of area). Hasil yang dihasilkan dari proses defuzzifikasi adalah lama waktu penyalaan pompa dalam detik. Bagaimana proses defuzzifikasi
dilampirkan pada Gambar 18.
Hasil rancangan kontrol fuzzy ini kemudian diaplikasikan ke dalam program Arduino.
0 0.5 1
-12 -10 -8 -6 -4 -2 0 2 4 6 8 10 12
21
Simulasi
Simulasi kontrol fuzzy matematis
Simulasi kontrol fuzzy matematis dilakukan dengan menggunakan MATLAB dan Microsoft Excel. Simulasi dilakukan dengan perhitungan matematis. Software Microsoft Excel berisi input nilai EC dan perhitungan perubahan konsentrasi larutan, sedangkan MATLAB mengeksekusi perhitungan
fuzzy dan menghasilkan output hasil fuzzy dari input Microsoft Excel. Bagan simulasi kontrol fuzzy matematis dilampirkan pada Gambar 19.
Simulasi ini mengikuti perubahan setpoint dan volume penambahan air pada waktu simulasi 60 menit. Berdasarkan Gambar 2 dan Tabel 4, pada waktu simulasi 1-35 menit EC yang diatur sebesar 1.7 mS/cm dan penambahan air 11.13 ml/menit, pada masa budidaya 36-49 menit EC yang diatur sebesar 1.6 mS/cm dan penambahan air 25.58 ml/menit, dan pada masa budidaya 50-60 menit EC yang diatur sebesar 1.9 mS/cm dan penambahan air sebesar 16.21 ml/menit. Volume larutan total awal pada simulasi matematis adalah 4 liter. Data-data
setpoint EC, volume penambahan air, dan volume larutan total merupakan input
data. Menggunakan input data tersebut dan persamaan yang telah ditulis di Microsoft Excel, kemudian simulasi matematis ini diproses. Khusus pada perhitungan volume AB mix, hasil perhitungan fuzzy ketika penambahan air dikali faktor pengali 10 dan penambahan AB mix dikali faktor pengali 1. Hasil simulasi kontrol fuzzy matematis sistem dapat dilihat pada Gambar 20.
22 1.4 1.5 1.6 1.7 1.8 1.9 2 0 10 20 30 40 50 60 EC ( m S/ cm )
Waktu simulasi (menit)
Referensi Simulasi Matematis Tidak Dikontrol
Waktu pembacaan dan penambahan air atau AB mix pada simulasi matematis ini dilakukan tiap menit. Evaluasi simulasi matematis dilakukan secara kuantitatif dengan batas apakah sistem mampu mempertahankan nilai EC dan mampu segera mencapai setpoint yang diharapkan ketika terjadi perubahan
setpoint selama kontrol. Berdasarkan grafik hasil simulasi matematis, dapat dilihat sistem mampu mempertahankan nilai EC tanpa error dan mampu mencapai
setpoint yang diharapkan dengan lag (selang waktu) yang tidak lama. Jika dibandingkan dengan referensi, simulasi ini memiliki lag 2 menit untuk menurunkan nilai EC dari 1.7 mS/cm ke 1.6 mS/cm dan lag 6 menit untuk menaikkan nilai EC dari 1.6 mS/cm ke 1.9 mS/cm. Berdasarkan acuan pola grafik kontrol pada Gambar 20, menjadi dasar evaluasi MAPE pada simulasi kontrol
fuzzy aktual.
Simulasi kontrol fuzzy aktual
Simulasi kontrol fuzzy aktual dilakukan untuk melihat kinerja sistem kontrol secara langsung. Input dari sensor EC dan ultrasonik dibaca oleh Arduino, kemudian dari input tersebut dibaca, lalu dilakukan perhitungan fuzzy oleh Arduino, dan hasil perhitungan berupa lama waktu penyalaan pompa dikirim ke
relay, dimana relay tersebut telah terhubung ke 4 pompa. Tiga pompa digunakan untuk kontrol EC larutan dan satu pompa lagi untuk simulasi penurunan nilai EC. Penambahan air sebagai gangguan akibat serapan nutrisi diaplikasikan sesuai dengan simulasi penurunan nilai EC menggunakan pompa pada Gambar 13. Tangki larutan yang digunakan mengacu pada tangki larutan nutrisi pada Gambar
23 1. Sistem aerasi sebagai pengaduk digunakan pada saat simulasi untuk proses pencampuran yang lebih cepat. Keluaran selang pompa diarahkan ke pengaduk sehingga diharapkan terjadi pengadukan yang lebih cepat. Sensor EC diletakkan agak jauh dari pengaduk agar yang nilai EC yang terbaca oleh sensor merupakan yang teraduk sempurna dan larutan dengan aliran yang tenang agar pembacaan lebih stabil. Sensor ultrasonik diletakkan tegak lurus dengan permukaan air sebagai pembaca ketinggian muka air larutan. Skema aliran data simulasi kontrol
fuzzy aktual dilampirkan pada Gambar 21
Hasil pengamatan dicatat dengan microcontroller. Hasil pengamatan Arduino dapat dilihat dengan serial monitor pada program Arduino IDE. Gambar 22 memperlihatkan bagaimana data ditampilkan pada serial monitor.
Sensor membaca 35 kali sebelum mengeksekusi perhitungan fuzzy untuk hasil pengamatan yang lebih stabil. Dapat dilihat dari gambar di atas bahwa pada pembacaan sensor ke 1-3 data yang masuk masih belum stabil dan akan memulai
Gambar 22 Tampilan serial monitor ketika pengamatan Gambar 21 Skema aliran data pada simulasi kontrol fuzzy aktual
24
perhitungan fuzzy apabila data yang masuk adalah data pembacaan yang ke 36. Pengamatan lag yang dimaksud adalah waktu pengamatan dimulai dari awal pembacaan sensor dalam milidetik. Waktu yang dibutuhkan sistem untuk mencapai setpoint tertentu dan waktu selesainya simulasi dapat diketahui dengan adanya pengamatan lag.
Hasil simulasi aktual disimpan di Microsoft Excel kemudian hasil simulasi tersebut ditampilkan dengan grafik bersama dengan hasil simulasi matematis dan referensi, sehingga dapat dibandingkan secara visual hasil simulasi aktual terhadap simulasi matematis dan referensi. Gambar 23 menunjukkan perbandingan referensi, hasil simulasi matematis dan simulasi aktual. Gambar 24 menunjukkan menunjukkan nilai error EC simulasi aktual terhadap simulasi matematis simulasi dan Gambar 25 menunjukkan nilai inferensi fuzzy selama simulasi aktual.
Gambar 23 Hasil pengamatan simulasi aktual yang dibandingkan dengan referensi dan simulasi matematis
Gambar 24 Nilai error EC simulasi aktual terhadap simulasi matematis
-0.12 -0.1 -0.08 -0.06 -0.04 -0.02 0 0.02 0.04 0.06 0 10 20 30 40 50 60 Er ror E C ( m S/ cm )
Waktu simulasi (menit)
1.4 1.5 1.6 1.7 1.8 1.9 2 0 10 20 30 40 50 60 EC ( m S/ cm )
Waktu simulasi (menit)
Referensi Simulasi Matematis Simulasi Aktual Tidak Dikontrol
25
Gambar 27 Lama penyalaan pompa air selama simulasi aktual
-4 -3 -2 -1 0 1 2 0 10 20 30 40 50 60 Ni la i i n fe re n si fu zz y
Waktu simulasi (menit)
Gambar 25 Nilai inferensi fuzzy selama simulasi aktual
0 1 2 3 4 5 6 7 8 9 10 0 10 20 30 40 50 60 La m a p e n ya la an p om p a A B mi x ( d e ti k)
Waktu simulasi (menit)
Gambar 26 Lama penyalaan pompa AB mix selama simulasi aktual
0 1 2 3 4 5 6 7 8 9 10 0 10 20 30 40 50 60 La m a p e n ya la an p om p a ai r (d e ti k)
26
Nilai inferensi fuzzy pada Gambar 25 menyatakan lama penyalaan pompa air atau AB mix. Nilai inferensi fuzzy kurang dari nol menyatakan lama penyalaan pompa AB mix kemudian dikalikan dengan faktor pengali -1 sedangkan nilai lebih dari nol menyatakan lama penyalaan pompa air kemudian dikalikan dengan faktor pengali 10. Gambar 26 dan 27 menunjukkan lama penyalaan pompa AB mix dan air selama simulasi aktual.
Berdasarkan Gambar 23, dapat dilihat bahwa performansi sistem kontrol dapat mengikuti pola perubahan EC simulasi matematis dan terdapat error selama masa steady state error dan adanya lag ketika terjadi perubahan setpoint dari 1.7 mS/cm ke 1.6 mS/cm dan 1.6 mS/cm ke 1.9 mS/cm. Error yang dihasilkan oleh simulasi ini diakibatkan oleh sensor, gangguan, dan sistem kontrol dengan pompa.
Pembacaan 1 sampai 3 oleh sensor tercatat nilai EC yang lebih rendah dari seharusnya ketika proses penambahan AB mix atau air seperti pada Gambar 22, sehingga terlihat nilai EC turun cukup signifikan yang kemudian mengikuti pola kembali sehingga terjadi error. Error berupa overshoot (error di atas setpoint) maupun undershoot (error di bawah setpoint) pada pengamatan diakibatkan oleh kontrol pompa menggunakan sistem ON-OFF walaupun waktu lama penyalaan pompa ditentukan dengan inferensi fuzzy. Menurut Siegenthaler (2011) karakteristik sistem ON-OFF adalah adanya overshoot dan undershoot saat kontrol.
Simulasi fuzzy aktual terlihat dapat mengikuti pola kontrol EC simulasi
fuzzy matematis walaupun terjadi overshoot. Selama masa steady state error, nilai
error terbesar mencapai 0.02 mS/cm ketika di awal pengamatan. Hal ini terjadi akibat ketidakstabilan sensor ketika di awal pengamatan seperti pada hasil pengamatan simulasi penurunan nilai EC pada Gambar 13. Selama masa perubahan nilai setpoint simulasi fuzzy aktual dapat mengikuti penurunan nilai EC simulasi matematis dengan lag sebesar 24 detik ketika perubahan setpoint dari 1.7 mS/cm ke 1.6 mS/cm namun dapat lebih cepat mencapai 1.6 mS/cm dibandingkan simulasi matematis. Hal yang sama terjadi pada perubahan setpoint dari 1.6 mS/cm ke 1.9 mS/cm dengan lag sebesar 35 detik saat memulai peningkatan nilai EC. Perubahan nilai EC yang lebih cepat oleh simulasi fuzzy aktual diakibatkan oleh eksekusi hasil inferensi fuzzy pada sistem fuzzy aktual lebih cepat dibandingkan dengan simulasi fuzzy matematis. Eksekusi inferensi fuzzy pada simulasi fuzzy aktual dilakukan setelah pembacaan sensor ke 35, sedangkan pada simulasi fuzzy matematis eksekusi inferensi fuzzy dilakukan per menit. Keterlambatan pada perubahan setpoint dari 1.6 mS/cm ke 1.9 mS/cm juga disebabkan oleh hal yang sama. Simulasi aktual masih pada proses pembacaan sensor pada saat simulasi matematis mulai mengeksekusi hasil inferensi fuzzy.
Berdasarkan Gambar 24, nilai error yang cukup besar pada menit ke 35 dan 50 menunjukkan terlambatnya sistem kontrol memulai penurunan EC. Osilasi error
terjadi akibat simulasi aktual lebih cepat mencapai setpoint dibandingkan dengan simulasi matematis.
Evaluasi hasil simulasi dilakukan dengan metode MAPE menunjukkan bahwa sistem mempunyai error sebesar 0.336%, dengan nilai MAPE kurang dari 25% maka dapat dikatakan simulasi berhasil dan mempunyai hasil yang memuaskan.
27
SIMPULAN DAN SARAN
Simpulan
Pembuatan desain sistem kontrol otomatik berbasis nilai EC menggunakan logika fuzzy telah selesai dilakukan. Model tanaman budidaya pada penelitian ini adalah tanaman tomat dengan masa budidaya 60 hari dan larutan nutrisi awal 100 liter. Model ini mempunyai 3 masa budidaya yang memiliki setpoint EC yang berbeda-beda, yaitu 1-5 minggu dengan EC 1.7 mS/cm, 6-7 minggu dengan 1.6 mS/cm dan 8-9 minggu dengan 1.9 mS/cm. Sistem kontrol yang telah dibuat mampu mempertahankan nilai EC dengan masa budidaya yang dipercepat 1440 kali dan larutan nutrisi awal yang diperkecil 25 kali dari model. Persamaan regresi linear kalibrasi sensor dan hubungan nilai EC dengan konsentrasi larutan nutrisi menunjukkan nilai R2 > 0.9 sehingga persamaan tersebut layak digunakan. Model penurunan nilai EC sebagai gangguan dengan penambahan air yang telah dibuat berdasarkan referensi sesuai dengan penurunan nilai EC akibat penyerapan nutrisi. Debit air yang dibutuhkan pada model penurunan EC 1-35 menit, 36-49 menit, dan 8-9 minggu berturut-turut adalah 11.13 ml/menit, 25.58 ml/menit, dan 16.21 ml/menit. Rancangan kontrol fuzzy dibuat dengan metode Mamdani dengan input error EC dan ketinggian larutan nutrisi dalam tangki dan output lama penyalaan pompa. Simulasi ini menggunakan 4 pompa, dengan 3 pompa untuk kontrol nutrisi dan 1 pompa untuk model penurunan nilai EC.
Simulasi matematis menggunakan MATLAB menunjukkan sistem mampu mempertahankan nilai EC dan mampu mengontrol nilai EC ketika terjadi perubahan setpoint. Simulasi aktual menunjukkan mampu menyamai hasil simulasi matematis dengan lag sebesar 24 detik ketika memulai perubahan
setpoint dari 1.7 mS/cm ke 1.6 mS/cm dan lag sebesar 35 detik ketika memulai perubahan setpoint dari 1.6 mS/cm ke 1.9 mS/cm. Evaluasi dengan metode MAPE menunjukkan simulasi aktual mempunyai nilai error sebesar 0.336%.
Saran
Simulasi penurunan nilai EC dapat dikembangkan dengan menggunakan unsur selain NO3 seperti K, Na, PO3, atau kombinasi unsur tersebut. Simulasi ini akan lebih akurat di kondisi nyata apabila memperhitungkan penyerapan tiap nutrisi dalam larutan AB mix serta serapan air oleh tanaman. Nilai error pada simulasi aktual dapat dikurangi dengan menggunakan kontrol fuzzy berbasis kontrol pompa selain ON-OFF seperti PWM (Pulse Width Modulation). Proses simulasi membutuhkan sensor yang lebih stabil. Sensor EC dapat diperbaiki logika pembacaannya agar pembacaan yang lebih stabil atau dapat diganti dengan sensor yang lebih stabil jika ada.
28
DAFTAR PUSTAKA
Abraham B, Ledolter J. 2005. Statistical Method for Forecasting. New Jersey (US): J Wiley.
Anonim. 2014. Volume by rotation using integration [internet]. [diacu pada 2014 Oktober 13]. Tersedia dari: http://www.wyzant.com /resources/lessons/math/calculus/integration/finding_volume.
Arif C. 2008. Optimasi nilai konduktivitas listrik larutan nutrisi pada sistem hidroponik tanaman tomat [tesis]. Bogor (ID): Institut Pertanian Bogor.
Atlas Scientific. 2014. EC circuit 3.0 [internet]. [diacu pada 2014 Maret 17]. Tersedia pada: http://dlnmh9ip6v2uc.cloudfront.net/datasheets/Sensors /Biometric/EC_Circuit_3.0.pdf.
Dermawati. 2006. Substitusi hara mineral organik terhadap inorganik untuk produksi tanaman pakchoy (Brassica rapa L.) secara hidroponik [tesis]. Bogor (ID): Institut Pertanian Bogor.
Havlin JL, Tisdale SL, Nelson WL, Beaton JD. 2005. Soil Fertility and Fertilizer: An Introduction to Nutrient Management. New Jersey (US): Pearson Prentice Hall. Ed-ke 7.
Hirzel T. 2011. Arduino – introduction [internet]. [diacu pada 2014 Oktober 13]. Tersedia pada: http://arduino.cc/en/Guide/Introduction.
Hyndman RJ, Koehler AB. 2006. Another look at measures of forecast accuracy.
International Journal of Forecasting. 22(1): 679-688.
Irfani MH. 2011. Logika Fuzzy. Palembang (ID): Jurusan Teknik Informatika Sekolah Tinggi Manajemen Informatika dan Komputer Multi Data Palembang. Kusumadewi S. 2002. Artificial Intelligence (Teknik dan Aplikasi). Yogyakarta
(ID): Graha Ilmu.
Kusumadewi S, Purnomo H. 2004. Aplikasi Logika Fuzzy untuk Pendukung Keputusan. Yogyakarta (ID): Graha Ilmu.
Mairusmianti. 2011. Pengaruh konsentrasi pupuk akar dan pupuk daun terhadap pertumbuhan dan produksi bayam (Amaranthus hybridus) dengan metode
Nutrient Film Technique (NFT) [skripsi]. Jakarta (ID): Universitas Islam Negeri Syarif Hidayatullah.
Makridakis S, Wheelwright SC. McGee VE. Forecasting (Methods and Applications). New York (US): J Wiley.
[PKHT] Pusat Kajian Holtikultura Tropika. 2013. Konsumsi Perkapita Holtikultura. Bogor (ID): PKHT
Prihmantoro, Indriani YH. 2005. Hidroponik Tanaman Buah: untuk Hobi dan Bisnis. Jakarta (ID): Penebar Swadaya.
Roberto K. 2003. How To Hydroponic. New York (US): Futuregarden Inc. Ed-ke 4.
Rosliani R, Sumarni N. 2005. Budidaya Tanaman Sayuran dengan Sistem Hidroponik. Lembang (ID): Balai Penelitian Tanaman Sayuran.
29 Siegenthaler J. 2011. Modern Hydronic Heating: For Residential and Light
Commercial Buildings. New York (US): Cengage Learning. Ed-ke 3.
Subrata IDM. 2009. Instrumentasi dan Kontrol Otomatik. Bogor (ID): Departemen Teknik Mesin dan Biosistem.
Suhardiyanto H. 2010. Teknologi Hidroponik untuk Budidaya Tanaman. Bogor (ID): IPB Pr.
Suprijadi, Nuraini N, Yusuf M. 2009. Sistem kontrol nutrisi hidroponik dengan menggunakan logika fuzzy. Jurnal Otomasi, Kontrol, dan Instrumentasi. 1(1):31-35.
Sutiyoso Y. 2008. Hidroponikala Yos. Jakarta (ID): Penebar Swadaya.
Trejo-Téllez LI, Gómez-Merino FC. 2012. Nutrient Solutions for Hydroponic Systems, Hydroponics - A Standard Methodology for Plant Biological Researches. Asao T, editor. Rijeka (HR): Croatia.
Weekakkody WAP, Wakui K, Nukaya A. 2011. Plant nutrient uptake in recirculation culture of tomato under growth stage based electrical conductivity adjustment. Journal of National Science of Sri Lanka. 39(2):139-147.
Whipker dan Cavins. 2000. Electrical conductivity (EC): units and conversions [internet]. [Diacu pada 2014 Desember 2]. Tersedia pada: http://www.ces.ncsu.edu/depts/hort/floriculture/Florex/EC%20Conversion.pdf Winsor GW, Hurd RG, Price D. 1979. Nutrient Film Technique – Grower’
30
Lampiran 1 Hasil dan contoh perhitungan
1. Nilai serapan kadar NO3 (Weekakkody et al. 2011) Masa budidaya (minggu) Serapan kadar NO3 (mg/tanaman/hari) 1-5 75 6-7 143 8-9 80
2. Perhitungan serapan kadar NO3 dalam ml AB mix
Um
=
()
(
)
x
Massa padatan A = 371.2 gram Massa padatan B = 256.9 gram
Massa total (m) = 628.1 gram = 628 100 miligram Kadar NO3 (P) = 9.9%
Jumlah tanaman (N) = 1
Volume larutan (V) = 2 liter (pencampuran tahap I) = 2 000 mililiter Perkalian dengan konstanta 1/10 merupakan proses titrasi tahap II
Untuk masa budidaya 1-5 minggu U = 75 mg/hari
Um = ( )
( )
x = 24.12 ml/hari
Untuk masa budidaya 6-7 minggu U = 143 mg/hari
Um = ( )
( )
x = 45.99 ml/hari
Untuk masa budidaya 8-9 minggu U = 80 mg/hari
Um = ( )
31 3. Perhitungan nilai konsentrasi jika nilai EC = 1.7 mS/cm atau 1 700 µS/cm
EC (µS/cm) = 160.24*Konsentrasi (%) + 297.8 1700 = 160.24*Konsentrasi (%) + 297.8 Konsentrasi = (1700 – 297.8)/160.24
Konsentrasi = 8.75 %
4. Perhitungan rumus hubungan ketinggian dengan volume menggunakan integral
Kemudian dijadikan ke bentuk planar dan diputar dengan sumbu x untuk mendapatkan persamaan volumenya
Dengan Persamaan 6, dapat diketahui rumus volume ketika ketinggian air berada pada titik tertentu
Volume = ∫ ( ) dx
Volume = ∫ dx
Volume = ( ) cm3
Volume = ( ) liter Sketsa tangki untuk simulasi fuzzy aktual
13.5 cm 0.6 cm 23 cm 10.5 cm Sensor Ultrasonik 10.5 13.5 0 0.6 23 y = 0.127x + 10.5
32
5. Contoh perhitungan penentuan debit air untuk simulasi penurunan NO3
Model Simulasi AB mix (ml) Total larutan (ml) Serapan nutrisi (ml) AB mix (ml) Total larutan (ml) Air (ml) 8 339.93 99 589.93 24.12 350.00 4 179.47 11.11 Dengan n = n Maka 8339.93 24.12 99589.93 24.12= 350.00 4179.47 i = 350.00 0.0835 4179.47 Vi = 11.11 ml 6. Contoh perhitungan MAPE
Detik ke Aktual (mS/cm) Matematis (mS/cm) Absolut error Absolut error/aktual (%)* 2151 1.64006 1.65889 0.01883 1.148 2152 1.64212 1.65766 0.01554 0.946 2153 1.64315 1.65643 0.01328 0.808 2154 1.64315 1.65520 0.01205 0.734 2155 1.63903 1.65398 0.01495 0.912 2156 1.63903 1.65275 0.01372 0.837 2157 1.63800 1.65152 0.01352 0.826 2158 1.63800 1.65029 0.01229 0.751 2159 1.64212 1.64907 0.00695 0.423 2160 1.64212 1.64784 0.00572 0.348
Total Absolut error/aktual (%) 7.732
Jumlah Data 10
MAPE (%) 0.7732
33 Lampiran 2 Gambar alat dan bahan
Pupuk AB mix padatan
EC meter
Sensor EC Sensor ultrasonik HC-SR04
Pompa air yang tersambung ke relay
Aerator
Rangkaian sistem kontrol Arduino UNO
34
Lampiran 3 Model penurunan nilai EC dan volume penambahan air untuk simulasi penurunan nilai EC
Model Simulasi Model Simulasi
Hari ke EC (µS/cm) Menit ke Air (ml) Hari ke EC (µS/cm) Menit ke Air (ml) 1 1696.37 1 10.09 31 1589.74 31 11.99 2 1692.84 2 10.15 32 1586.16 32 12.07 3 1689.31 3 10.20 33 1582.57 33 12.14 4 1685.78 4 10.26 34 1578.99 34 12.21 5 1682.24 5 10.32 35 1575.40 35 12.29 6 1678.71 6 10.37 36 1568.56 36 23.64 7 1675.17 7 10.43 37 1561.71 37 23.92 8 1671.63 8 10.49 38 1554.86 38 24.20 9 1668.09 9 10.55 39 1547.99 39 24.49 10 1664.54 10 10.61 40 1541.12 40 24.78 11 1661.00 11 10.67 41 1534.25 41 25.08 12 1657.45 12 10.73 42 1527.37 42 25.39 13 1653.90 13 10.79 43 1520.48 43 25.69 14 1650.35 14 10.86 44 1513.59 44 26.01 15 1646.80 15 10.92 45 1506.69 45 26.33 16 1643.25 16 10.98 46 1499.78 46 26.66 17 1639.69 17 11.04 47 1492.87 47 26.99 18 1636.14 18 11.11 48 1485.95 48 27.33 19 1632.58 19 11.17 49 1479.02 49 27.68 20 1629.02 20 11.24 50 1475.14 50 15.64 21 1625.46 21 11.30 51 1471.26 51 15.75 22 1621.89 22 11.37 52 1467.38 52 15.86 23 1618.33 23 11.44 53 1463.50 53 15.98 24 1614.76 24 11.50 54 1459.61 54 16.09 25 1611.19 25 11.57 55 1455.72 55 16.21 26 1607.62 26 11.64 56 1451.83 56 16.33 27 1604.05 27 11.71 57 1447.94 57 16.44 28 1600.47 28 11.78 58 1444.05 58 16.57 29 1596.90 29 11.85 59 1440.15 59 16.69 30 1593.32 30 11.92 60 1436.25 60 16.81
35 Lampiran 4 Hasil simulasi fuzzy matematis dan aktual
Menit ke EC simulasi matematis (µS/cm) EC simulasi aktual (µS/cm) Menit ke EC simulasi matematis (µS/cm) EC simulasi aktual (µS/cm) 1 1700.03 1693.66 31 1700.65 1697.78 2 1701.06 1715.30 32 1700.64 1695.72 3 1700.77 1699.84 33 1700.63 1700.87 4 1700.85 1708.09 34 1700.62 1698.81 5 1700.82 1697.78 35 1700.61 1697.78 6 1700.82 1701.90 36 1646.61 1642.12 7 1700.81 1700.87 37 1613.58 1615.32 8 1700.81 1707.06 38 1600.96 1598.83 9 1700.80 1693.66 39 1600.47 1598.83 10 1700.80 1697.78 40 1600.44 1597.80 11 1700.79 1698.81 41 1600.41 1595.74 12 1700.78 1698.81 42 1600.37 1597.80 13 1700.78 1708.09 43 1600.33 1596.77 14 1700.77 1706.03 44 1600.29 1597.80 15 1700.76 1708.09 45 1600.25 1596.77 16 1700.76 1698.81 46 1600.21 1599.86 17 1700.75 1698.81 47 1600.17 1599.86 18 1700.74 1699.84 48 1600.12 1598.83 19 1700.74 1702.93 49 1600.08 1596.77 20 1700.73 1699.84 50 1752.88 1691.60 21 1700.72 1697.78 51 1807.76 1793.63 22 1700.72 1703.96 52 1847.83 1878.15 23 1700.71 1698.81 53 1878.74 1893.61 24 1700.70 1700.87 54 1894.22 1892.58 25 1700.69 1698.81 55 1899.15 1896.70 26 1700.69 1698.81 56 1899.74 1896.70 27 1700.68 1692.63 57 1899.77 1897.74 28 1700.67 1699.84 58 1899.76 1898.77 29 1700.66 1698.81 59 1899.74 1897.74 30 1700.66 1697.78 60 1899.72 1898.77
36
RIWAYAT HIDUP
Penulis dilahirkan di Pekanbaru pada tanggal 4 September 1993 dari ayah Ir. Aji Ibrahim dan ibu Ir. Anna Juliarti, M.Si. Penulis adalah putra pertama dari dua bersaudara. Penulis menyelesaikan pendidikan akademik di SD Islam As-shofa Pekanbaru, SMPN 4 Pekanbaru, SMAN 8 Pekanbaru, dan diterima di IPB pada tahun 2010 melalui jalur Ujian Seleksi Masuk IPB (USMI) di Fakultas Teknologi Pertanian, Departemen Teknik Mesin dan Biosistem.
Selama mengikuti perkuliahan, penulis pernah menjadi asisten praktikum Lingkungan dan Bangunan Pertanian pada tahun ajaran 2013/2014. Selain itu, penulis juga aktif mengikuti kegiatan organisasi kemahasiswaan dan kepanitiaan. Kegiatan tersebut diantaranya adalah divisi keilmuan pada Forum Bina Islam FATETA periode 2012-2013 dan tim medis pada Masa Perkenalan Departemen Teknik Mesin dan Biosistem tahun 2012. Penulis juga aktif mengikuti lomba karya tulis ilmiah dengan mengikuti Program Kreativitas Mahasiswa (PKM) sebanyak dua kali yaitu pada tahun 2013 dan 2014.
Pada bulan Juni-Agustus 2013 penulis melaksanakan Praktik Lapangan di PTPN V Sei Pagar, Riau dengan Judul “Mempelajari Aspek Informatika Pertanian pada Kegiatan Budidaya dan Pengolahan Sawit di PKS Sei Pagar”. Sebagai tugas akhir, penulis melakukan penelitian dengan judul “Desain Sistem Kontrol Otomatik Larutan Nutrisi Berbasis Electrical Conductivity untuk Budidaya Hidroponik Menggunakan Logika Fuzzy” di bawah bimbingan Dr. Ir. Mohamad