DESAIN DAN IMPLEMENTASI KONTROLER OPTIMAL BERBASIS
NEURO FUZZY UNTUK PENGENDALIAN SIMULATOR HYBRID
ELECTRIC VEHICLE
Galih Satrio Aji Wibowo
Jurusan Teknik Elektro – FTI, Institut Teknologi Sepuluh Nopember Kampus ITS, Sukolilo, Surabaya – 60111
e-mail : [email protected]
Abstrak - Menipisnya cadangan energi minyak bumi dan tingginya tingkat polusi udara yang disebabkan oleh pemakaian kendaraan bermotor merupakan permasalahan yang harus segera diatasi. Salah satu solusi yang paling memungkinkan untuk saat ini adalah Hybrid Electric Vehicle (HEV). HEV mengkombinasikan mesin bakar dan motor listrik untuk meminimumkan penggunaan mesin bakar sehingga akan dicapai tingkat konsumsi bahan bakar dan tingkat polusi yang rendah. Pada tugas akhir ini dibuat suatu miniatur HEV atau bisa disebut Simulator HEV. Simulator ini merepresentasikan kondisi nyata HEV namun dalam skala yang lebih kecil. Simulator ini terdiri dari mesin bakar 2 tak sebagai penggerak utama, motor DC sebagai penggerak pendukung dan beban berupa rem magnetik arus eddy. Saat mesin bakar diberi beban nominal, maka akan didapat kurva input output yang dapat digunakan untuk mencari model nominal. Model nominal ini digunakan untuk memberikan setpoint untuk simulator HEV. Saat simulator HEV diberi beban yang melebihi beban nominal, maka kecepatan putar mesin bakar akan lebih rendah dibandingkan kecepatan putar dari model nominal. Kontroler Optimal berbasis Neuro Fuzzy digunakan untuk mengatur torsi motor DC dengan energi minimum agar mampu untuk membantu mesin bakar mencapai kecepatan putar yang seharusnya.
Kata Kunci: HEV, Kontrol Optimal Neuro Fuzzy, Radial Basis Function Network
1. Pendahuluan
Pada masa sekarang ini, cadangan energi berupa gas dan minyak bumi sudah semakin menipis. Semakin menipisnya cadangan energi minyak bumi sedangkan permintaan semakin meningkat maka harga bahan bakar pun meningkat. Padahal di jaman modern ini, kebutuhan untuk mobilisasi sangat tinggi terutama di sektor kendaraan pribadi. Dengan makin tingginya harga bahan bakar maka biaya untuk melakukan mobilisasi akan semakin tinggi pula.
Salah satu solusi adalah dengan mengembangkan kendaraan yang memiliki tingkat efisiensi yang tinggi yaitu Hybrid Electric Vehicle (HEV). HEV pada dasarnya merupakan kombinasi dari mesin dan motor listrik. Motor
listrik berperan membantu mesin mencapai torsi dan akselerasi sesuai dengan yang diinginkan. Sehingga untuk torsi dan akselerasi yang sama, HEV menggunakan mesin dengan kapasitas yang lebih kecil dibandingkan kendaraan konvensional. Atau dengan kata lain bahan bakar lebih irit. Dengan prinsip kerja yang sangat mempertimbangkan tingkat efisiensi maka HEV mampu menjawab semua tantangan dan persoalan yang muncul terkait dengan makin menipisnya cadangan energi minyak, mahalnya harga bahan bakar minyak, dan tingkat polusi udara yang tinggi.
Simulator Hybrid Electric Vehicle (Simulator HEV) dibuat untuk mereduksi kompleksitas dari HEV tanpa mengurangi inti kerjanya. Untuk mengatur distribusi torsi motor listrik yang membantu mesin bakar untuk menanggung beban kerja yang diberikan pada suatu nilai tertentu maka dirancang suatu kontroler optimal berbasis Neuro-Fuzzy.
Masalahnya adalah bagaimana cara mengatur torsi yang diberikan oleh motor listrik sehingga mampu membantu mesin bakar untuk menanggung beban yang diberikan, dengan menggunakan energi mínimum. Oleh karena itu dirancang sebuah kontroler Neuro-Fuzzy untuk mengatur torsi motor listrik.
2. Teori Penunjang
2.1 Konfigurasi Hybrid Electric Vehicle
Secara umum, perbedaan konfigurasi antara HEV dan kendaraan bermotor konvensional terletak pada motor listrik, baterai (sumber energi motor listrik), dan sistem transmisi. Penambahan perangkat-perangkat tersebut bertujuan untuk meningkatkan efisiensi aliran energi pada kendaraan. Salah satu langkah efisiensi tersebut adalah mengubah energi pengereman atau deselerasi( yang biasanya diubah menjadi panas oleh gaya gesek kampas rem) untuk diubah menjadi energi listrik yang disimpan di dalam baterai. Energi yang tersimpan dalam baterai inilah yang nantinya akan digunakan motorlistrik untuk membantu mesin bakar untuk menanggung beban. Dengan demikian maka kerja dari mesin bakar akan lebih ringan sehingga meminimalkan konsumsi bahan bakar.
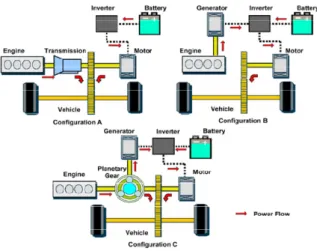
Berdasarkan arsitektur mekanik, HEV bisa dibagi menjadi 3 kategori, yaitu : konfigurasi parallel (gambar 2.1(A)), konfigurasi seri (gambar 2.1(B)), konfigurasi memanfaatkan power-split (gambar 2.1(C))
Gambar 2.1 (a). Konfigurasi Parallel. (b).Konfigurasi Seri.
(c). Konfigurasi dengan power-split
Pada konfigurasi parallel, terdapat dua jalur aliran daya, aliran mekanik dan aliran elektrik. Setiap aliran daya bisa menjalankan kendaraan secara individu maupun bersama. Motor listrik bisa difungsikan sebagai motor maupun generator. Pengaturan kerja motor listrik sangat penting sehingga tidak memboroskan energi yang tersimpan di dalam baterai. Kelemahan konfigurasi ini adalah kapasitas charge baterai tidak terlalu besar dan bersifat diskontinyu.
Pada konfigurasi seri, motor listrik berfungsi penuh sebagai alat untuk menjalankan kendaraan. Daya motor diberikan oleh bateerai ataupun generator yang mengubah energi gerak dari mesin bakar, menjadi energi listrik. Karena operasi mesin bakar tidak tergantung dari kecepatan kendaraan dan beban, maka mesin bakar bisa beroperasi di kondisi optimal sepanjang waktu. Kekurangan dari konfigurasi ini adalah respon yang tidak terlalu cepat bila diiniginkan akselerasi tiba-tiba.
Pada konfigurasi dengan menggunakan power – split device, maka kelemahan konfigurasi parallel dan seri bisa diatasi. Sistem ini dikembangkan oleh Toyota dan diimplementasikan pertamakali pada Toyota Prius generasi pertama.
Berikut adalah perbandingan kapasitas konfigurasi parallel, seri, dan power split device (seri-parallel)
Tabel 2.1 Perbandingan kapasitas konfigurasi HEV
Dengan melihat data tabel diatas, maka konfigurasi menggunakan power split device (seri-parallel) adalah yang terbaik karena mampu mengeliminasi kelemahan kelemahan konfigurasi seri atau parallel dan memiliki kelebihan kelebihan konfigurasi seri dan parallel.
2.2 MotorDC
Syarat yang diperlukan agar motor DC dapat bekerja adalah sumber magnet yang menghasilkan medan magnet, kawat dialiri arus yang memotong medan magnet, dan komutator. Apabila syarat syarat tersebut terpenuhi maka motor DC akan mampu untuk mengubah tenaga listrik menjadi tenaga gerak.
Secara fisik, motor listrik memiliki bagian yang berputar dan yang diam. Rotor adalah bagian yang berputar dan stator adalah bagian yang diam. Pada motor DC, stator seringkali digunakan untuk kumparan medan yang berfungsi untuk menghasilkan medan magnet. Sedangkan rotor digunakan untuk kumparan jangkar (armature) yang menghasilkan gaya putar. Kumparan jangkar pada dasarnya adalah kawat yang dialiri arus sehingga menimbulkan gaya lorentz. Karena jumlah kawatnya banyak maka disebut kumparan. Dengan semakin banyaknya kawat maka gaya lorentz yang dihasilkan akan semakin besar dan kontinyu. Torsi yang terbentuk mengikuti persamaan berikut :
τ = Torsi yang dibangkitkan = fluks magnet
= Arus jangkar K = Konstanta mesin
Saat motor berputar, maka timbul ggl induksi. Tegangan ini melawan tegangan sumber motor. Tegangan ini disebut juga EMF balik (Back Electromotive Force). EMF balik ini mengikuti persamaan sebagai berikut :
Dimana c = konstanta n = kecepatan putar
= fluks magnet
maka tegangan jangkar adalah
Karena = V dan c = K maka kecepatan putar yang dihasilkan adalah
Dimana
n = kecepatan sudut rotor (rad/s) K= Konstanta mesin
V= Tegangan jangkar (V) = Arus jangkar (A)
= tahanan jangkar (ohm) Φ= fluks magnet
3. Perancangan Sistem
Blok diagram simulator HEV dapat dilihat pada gambar di bawah:
Gambar 3.1 Blok diagram simulator HEV
3.1 Model Nominal
Model nominal dirancang dengan mesin bakar
bekerja secara individu tanpa diberi bantuan oleh motor DC , dan diberi beban nominal. Rem magnetik diberi tegangan sebesar 80 V untuk membuat beban nominal. Model nominal digunakan untuk membuat output target yang harus dicapai oleh simulator HEV. Jadi saat mesin bakar dijalankan dan diberi beban yang melebihi nilai beban nominal sehingga kecepatan putar berada di bawah kecepatan putar target maka kontroler akan memerintahkan motor DC untuk memberi tambahan torsi sampai output aktual sama dengan output target.
Untuk mencari nilai K maka diperlukan respon output steady state
Dimana Kecepatan putar sumbu = y = output Dan Pedal = x = input
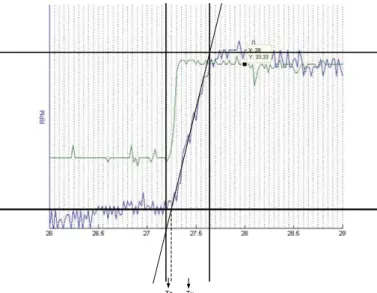
Dari pengambilan data pedal dan kecepatan putar, ternyata respon output tidak linier pada semua bukaan pedal. Namun untuk daerah kerja 1000-2000 rpm respon output terhadap input menunjukkan hubungan yang mendekati linier. Grafik respon output terhadap input dapat dilihat pada gambar di bawah
Gambar 3.2 Respon kecepatan putar aktual terhadap persen
bukaan pedal
Sehingga untuk mempermudah perhitungan maka dilakukan linierisasi sehingga didapatkan
1320 30 44 Sedangkan kemiringan=K sehingga
44
Gambr 3.3 Respon output yang digunakan untuk melakukan
identifikasi statis model nominal
didapatkan 0.05 0.4 Sehingga 0.125
Dari tabel Strejc nilai akan sesuai dengan n=2 , sehingga • 2.718 maka .. 0.147
• . 0.104 . 0.4 0.0416
• 0.05 0.0416 0.0084
Didapatkan fungsi alih model nominal 44
0.00018173 0.024098 0.3052 1 Fungsi alih model nominal didiskritkan, dengan time
sampling=0.05 s sehingga menjadi
2.418 7.253 7.253 2.418 0.2967 0.4286 0.1648
3.2 Kontroler Neuro-Fuzzy
Kontroler optimal berbasis neuro fuzzy diimplementasikan untuk mengendalikan simulator HEV agar mampu mengembalikan kecepatan putar di poros utama saat diberi beban yag melebihi beban nominal. Struktur neuro fuzzy yang digunakan mengacu pada struktur Radial Basis Function Network (RBFN) dengan dua input dan satu output. Gambar struktur kontroler Neuro Fuzzy dapat dilihat pada gambar di bawah ini.
Gambar 3.4 Struktur Kontroler Neuro Fuzzy Radial Basis Network
30 1320
Dari gambar struktur neuro fuzzy RBFN di atas nilai u akan sama dengan
Kriteria optimal yang ingin dipenuhi adalah 1 2 Dengan ∆ 0 0
Maka fungsi kriteria menjadi 1
2 1 2
Bila dinyatakan dalam bentuk diskrit akan menjadi seperti berikut:
2 ∆
Dinyatakan persamaan sebagai berikut: ∆
, , ,
, , , Sehingga berlaku metode Gradient • Untuk memperbarui | | 2 ∆ 2 ∆ ∆ 2 2 1 1 2 1 2 ∆ 1 1 1 1 2 1 Dimisalkan : 2 1 1 2 2 ∆ 1 1 1 2 1
Maka akan didapatkan: 2 1 2 1 2 1 2 1 2 2 1 1 2 2 ∆ 1 1 1 2 1
Nilai akan diperbarui dengan persamaan berikut: |
• Untuk memperbarui
| Dengan menggunakan nilai
Dan dimisalkan
Maka | dapat diturunkan sbb : | 2 ∆ 2 ∆ ∆ 2 2 1 1 2 2 ∆ 1 1 1 2 Dimisalkan : 2 1 1 2
2 ∆ 1 1 1 2
Maka akan didapatkan: 2 1 2 1 2 1 2 1 2 2 1 1 2 2 ∆ 1 1 1 2
Nilai akan diperbarui dengan persamaan berikut: |
• Untuk memperbarui
Dari gambar struktur Neuro Fuzzy di atas, dapat diamati nilai Y dan Z seperti berikut
√
Dengan memberikan perambatan error proporsional , maka proses learning dan akan meminimumkan kriteria sebagai berikut:
1 2
|
1 2 ∑
Nilai akan diperbarui dengan persamaan berikut: |
• Untuk memperbarui
Dengan memberikan perambatan error proporsional , maka proses learning dan akan meminimumkan kriteria sebagai berikut:
1 2
|
1 12 1
Nilai akan diperbarui dengan persamaan berikut: |
4. Pengujian kontroler dan analisa
Pengujian kontroler optimal Neuro Fuzzy dilakukan setelah kontroler optimal Neuro-Fuzzy di learning bobotnya secara on-line dengan learning rate sebesar 0.000000001 selama 3 x 5 menit. Proses learning yang dilakukan, menghasilkan bobot- bobot kontroler sebagai berikut:
0.0008673 1.2 0.3 0 2.2847 6.5493
Kriteria minimum yang digunakan untuk proses learning adalah : 2 ∆ Dengan nilai 1 100 1
Sehingga kriteria minimum menjadi
2 100∆
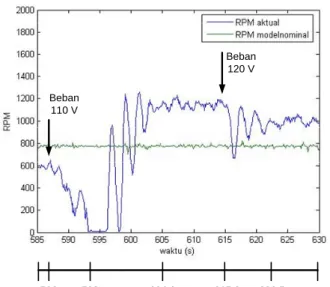
Kontroler diuji dengan memberikan variasi beban dengan nilai di atas beban nominal. Yaitu beban 90 V, 110V, dan 120V.
586 593 604.6 615.2 622.5 Beban
110 V
Beban 120 V
Gambar 4.1 Respon kecepatan putar aktual terhadap kecepatan
putar model nominal
• Pada saat t=585s :
Bukaan pedal diatur pada kondisi 16 % dan diberi beban sedikit diatas beban nominal (90 V). Kontroler Optimal Neuro-Fuzzy belum diaktifkan. Kecepatan putar model nominal mempunyai nilai 775 rpm. Sedangkan kecepatan putar aktual berada pada nilai 600 rpm.
• Pada saat t = 586 s :
Beban di tambah menjadi 110 V. Mesin bakar tidak mampu mengatasi pertambahan beban sehingga mengakibatkan kecepatan putar actual mulai mengalami penurunan yang signifikan hingga berhenti.
• Pada saat t = 593 s sampai 604.6 s :
Kontroler optimal Neuro-Fuzzy diaktifkan. Motor segera bekerja untuk membantu mesin bakar menanggung beban. Kontroler memerintahkan motor DC untuk mengejar
setpoint. Dapat diamati bahwa kecepatan putar actual
mengalami osilasi yang sangat besar namun konvergen hingga menuju pada titik steady state di 1130 rpm. Osilasi mungkin disebabkan oleh beban yang permukaannya tidak rata. Sehingga menimbulkan gaya gesek yang tidak kontinyu dan tidak stabil. Beban yang tidak kontinyu ini membuat kontroler sedikit luput untuk mencapai setpoint.
• Pada saat t = 604.6 s sampai t = 615.2 s :
Kecepatan aktual berada di titik steady state. Namun terjadi
error antara kecepatan putar model nominal dengan
kecepatan putar aktual sebesar 355 rpm. Error yang terjadi bisa dikatakan sangat besar. Hal ini kemungkinan disebabkan karena proses learning bobot yang kurang mencukupi. Sehingga bobot – bobot yang merupakan parameter dari kontroler optimal Neuro – Fuzzy belum sesuai untuk menghasilkan nilai indeks performansi yang ditentukan agar mencapai nilai minimum.
• Pada saat t = 615.2 s sampai t = 630 s :
Beban ditambah menjadi 120 V. Penambahan beban ini menyebabkan kecepatan putar aktual menurun. Kontroler berusaha membantu agar penurunan kecepatan putar actual tidak terus terjadi. Sehingga kontroler mengeluarkan aksi control untuk membantu mesin bakar menanggung beban. Kecepatan putar actual mengalami osilasi sebelum mencapai
titik steady state yang baru. Setelah tercapai nilai steady state yang baru, ternyata masih terdapat error antara kecepatan putar aktual dengan kecepatan putar model nominal. Error cukup besar kemungkinan terjadi karena proses learning bobot yang kurang mencukupi.
5. Kesimpulan
Performansi kontroler Neuro-Fuzzy yang belum mendapat proses learning yang cukup, belum mampu untuk memberikan respon output yang sesuai. Namun dengan kondisi learning yang prematur kontroler Neuro-Fuzzy yang dirancang mampu memberikan bantuan torsi untuk mesin bakar sehingga mampu menanggung beban. Sehingga kecepatan putar aktual mencapai kecepatan putar model nominal .
DAFTAR PUSTAKA
[1] Agustinah, Trihastuti, Sistem Pengaturan Optimal, Surabaya, 2006
[2] Kusumadewi, Sri, “Neuro-Fuzzy” , Graha Ilmu, Yogyakarta, 2006
[3] Jang, JSR ; Sun, CT; dan Mizutani, E. Neuro-Fuzzy and Soft Computing. Prentice Hall. London. 1997
[4] Scherz, Paul, “Practical Electronic for Inventors” ,
Mc-Graw Hill, New York. 2000.
[5] Bejo, Agus, “C&AVR : Rahasia Kemudahan Bahasa C dalam MIkrokontroler ATMega8535” , Graha Ilmu,
Yogyakarta, 2008
[6] Heryanto, Ary,” Pemrograman Bahasa C untuk Mikrokontroler ATMEGA8535”, Penerbit ANDI,
Yogyakarta, 2008
[7] Iswanto, “ Antarmuka Port Parallel dan Port Serial dengan Delphi”, Penerbit Gava Media, Yogyakarta, 2008
[8] Wahana Komputer, “ Pemrograman Borland Delphi 7.0”, Penerbit ANDI, Yogyakarta, 2003.
[9] Niels J. Schouten, Mutasim A. Salman, and Naim A. Kheir,” Fuzzy Logic Control for Parallel Hybrid Vehicles”, IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 10, NO. 3, mei, 2002
RIWAYAT PENULIS
Galih Satrio Aji Wibowo dilahirkan di Purworejo, Jawa Tengah. Putra dari Bapak Ir.Taryadi dan Ibu Dra. Foriyani Subiyatningsih , MHum. Penulis memulai pendidikan formal di SD Al-Hikmah, Surabaya. Kemudian melanjutkan ke SLTPN 1 Surabaya. Setelah itu, penulis melanjutkan pendidikan di SMU 8 Yogyakarta. Pada tahun 2004 penulis berhasil melanjutkan ke pendidikan tinggi di jurusan Teknik Elektro Institut Teknologi Sepuluh Nopember, Surabaya. Penulis memilih konsentrasi Bidang Studi Teknik Sistem Pengaturan.