i
PEMODELAN DAN SIMULASI KECEPATAN MOTOR DC
BERBASIS FUZZY LOGIC CONTROLLER DENGAN 5
FUNGSI KEANGGOTAAN (BEBAN TETAP)
TUGAS AKHIR
Untuk memenuhi sebagian persyaratan
Untuk mencapai derajat Sarjana S-1
Program Studi Teknik Elektro
DISUSUN OLEH :
ANTON DWI MARDANI
E11.2004.00122
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS DIAN NUSWANTORO SEMARANG
2014
iii
LEMBAR PERNYATAAN KEASLIAN SKRIPSI
Saya yang bertanda tangan dibawah ini : Nama : Anton Dwi Mardani NIM : E11.2004.00122 Juruan : Teknik Elektro S1
Judul Skripsi : Pemodelan dan Simulasi Kecepatan Motor DC Berbasis Fuzzy Logic Controller Dengan 5 Fungsi Keanggotaan (Beban Tetap).
Menyatakan dengan sebenarnya bahwa penulisan Skripsi berdasarkan hasil penelitian, pemikiran dan pemaparan asli dari penulis sendiri, baik untuk naskah laporan maupun kegiatan yang tercantum sebagai bagian dari Skripsi ini. Jika terdapat karya orang lain, penulis akan mencantumkan sumber secara jelas.
Demikian pernyataan ini saya buat dengan sesungguhnya dan apabila dikemudian hari terdapat penyimpangan dan ketidak benaran dalam pernyataan ini, maka saya bersedia menerima sanksi lain sesuai dengan norma yang berlaku diperguruan tinggi ini.Demikian pernyataan ini saya buat dalam keadaan sadar tanpa paksaan dari pihak manapun.
Semarang, 25 Agustus 2014 Yang membuat pernyataan,
iv ABSTRAK
Motor DC sekarang-sekarang ini sudah banyak digunakan di kehidupan sehari-harI. Seperti di rumah motor dc digunakan untuk mixer, bor listrik, fan angina. Sedangkan di dunia industry, motor DC kadangkala disebut juga “kuda kerja” nya industri sebab diperkirakan bahwa motor-motor menggunakan sekitar 70% beban listrik total di industri. Motor DC itu sendiri adalah motor yang digerakkan dengan arus searah (DC). Dalam pengaturan arah putaran menggunakan pengendali (controller). Tetapi Dalam penggunaannya, motor dc baik untuk rumahan atau industry pasti akan menemui masalah, masalah yang sering dihadapi adalah tidak stabilnya kecepatan putaran motor dc yang dapat mengakibatkan ketidakstabilan system. Sehingga diperlukan penelitian-penelitian yang dibutuhkan untuk membuat kecepatan putaran motor dc menjadi stabil. Ada beberapa cara untuk mengendalikan kecepatan motor dc yaitu dengan PID, PWM, dan Fuzzy Logic Controller. Dalam penelitian ini penulis mencoba mengendalikan kecepatan motor dengan Fuzzy Logic Controller dengan dua fungsi keanggotaan 3 dan 5 fungsi keanggotaan. Tapi peneliti lebih menganjurkan menggunakan 5 fungsi keanggotaan karena hasil yang di dapat lebih bagus karena membutuhkan waktu yang relative sebentar untuk mendapatkan kecepatan putaran motor DC yang stabil lebih cepat daripada menggunakan 3 fungsi keanggotaan. Dalam penelitian ini penulis menguraikan bagaimana mengendalikan motor dengan Fuzzy Logic Controller, yang mana dilakukan dengan pendekatan pemodelan dan simulasi. Adapun Fuzzy Logic Contoller dalam penelitian ini dibangun dari blok pada simulink Matlab dan menggunakan 2 tipe membership function, yaitu tipe segitiga dan tipe trapezium. Dengan menggunakan membership function yang berbeda hasil yang didapat juga berbeda, dimana kecepatan untuk mencapai kestabilan lebih baik menggunakan membership function tipe segitiga karena kecepatan menuju stabil yang sempurna atau 1. Tapi untuk menghasilkan kecepatan putaran yang stabil kita juga perlu mengatur aturan-aturan fuzzy logic agar menghasilkan putaran motor dc yang stabil.
v ABSTRACT
DC motors these days are already widely used in daily life. Such as at home, dc motor is used for mixer, electric drill, fan. Whereas in the industrialized world, dc motor is sometimes called the “work horse” industry because it is estimed that motors used about 70% of the total electrical load in the industry. DC motor itself is motor driven with direct current (DC). In setting the direction of rotation using the controller (the controller). But in its used, either dc motor for home or industry will inevitably encounter a problem, a problem often encountered is not stable dc motor speed can result in system instability. So that the necessary studies required to make a dc motor rotation speed becomes stable. There are several ways to control the speed of dc motor, with PID, PWM and Fuzzy Logic Controllers. In this study the authors tried to control the motor speed with a Fuzzy Logic Controller with two membership functions 3 dan 5 membership functions. But researchers further recommend using 5 membership functions because the results are better because it takes a relatively briefly to get dc motor rotation speed is stabilized more quickly than using 3 membership functions. In this study the authors describe how to control motors with Fuzzy Logic Controller, which is performed by modeling and simulation approach. As for the Fuzzy Logic Controller in this study was built from blocks in Simulink matlab and use 2 types of membership functions, namely the type of triangle and trapezoid type. By using different membership functions are also different results obtained, in which the speed in order to achieve better stability using a triangle-type membership function for perfect speed toward steady or 1. But to produce a steady rotation speed we also need to set the rules of fuzzy logic in order to produce a stable dc motor rotation.
vi
KATA PENGANTAR
Puji syukur penulis panjatkan kehadirat Tuhan atas berkat, rahmat, dan penyertaannya-Nya, penyusunan skripsi yang berjudul “ Pemodelan dan Simulasi
Kecepatan Motor DC Berbasis Fuzzy Logic Controller Dengan 5 Fungsi Keanggotaan (Beban Tetap) ”dapat diselesaikan dengan baik.
Penulis menyadari bahwa dalam proses penulisan skripsi ini banyak mengalami kendala, namun berkat bantuan, bimbingan, kerjasama dari berbagai pihak sehingga kendala-kendala yang dihadapi tersebut dapat diatasi. Untuk itu penulis menyampaikan ucapan terima kasih dan penghargaan kepada :
1. Bapak Dr. Ir. Edi Noersasongko, M.Kom, selaku Rektor Universitas Dian Nuswantoro Semarang.
2. Bapak Dr. Eng. Yuliman Purwanto, M.Eng, selaku Dekan Fakultas Teknik Universitas Dian Nuswantoro Semarang.
3. Ibu Dr.Dian Retno Sawitri,Ir.MT, selaku Ketua Program Studi Teknik Elektro S1 Universtas Dian Nuswantoro dan Dosen pembimbing 1 yang telah memberikan dorongan dan semangat untuk segera menyelesaikan penyusunan skripsi ini.
4. Bapak Herwin Suprijono, MT selaku dosen pembimbing 2.
5. Bapak dan Ibu Dosen serta Staf di Fakultas Teknik yang telah memberi bekal ilmu pengetahuan sehingga penulis dapat menyelesaikan studi dan menyelesaikan penulisan skripsi ini.
6. Om Ari Djoko Santoso, SH dan tante Titik Rustianingsih yang selalu memberikan bantuan materiil dan tempat berteduh untuk mengerjakan laporan.
vii
7. Teman-teman angkatan 2004 seperjuangan, yang masih penuh semangat.
8. Serta semua pihak yang tidak dapat penulis sebut satu persatu yang telah membantu dalam penyelesaian penulisan skripsi ini.
Akhirnya, dengan segala kerendahan hati penulis menyadari masih banyak terdapat kekurangan-kekurangan, sehingga penulis mengharapkan adanya saran dan kritik yang bersifat membangun demi kesempurnaan skripsi ini.
Semarang, 25 Agustus 2014 Penulis
viii
DAFTAR ISI
HALAMAN JUDUL ... i
HALAMAN PENGESAHAN ... ii
SURAT KETERANGAN KEASLIAN SKRIPSI ... iii
ABSTRAK ... iv
KATA PENGANTAR ... v
DAFTAR ISI ... vii
BAB I PENDAHULUAN 1.1 Latar Belakang Masalah ... 1
1.2 Rumusan Masalah ... 2
1.3 Tujuan penelitian ... 3
1.4 Batasan masalah ... 3
1.5 Manfaat penelitian………... 3
1.6 Sistematika pemulisan ... .3
BAB II LANDASAN TEORI 2.1 Motor DC……… …. ... 5
2.2 Fuzzy Logic Controller ... 7 BAB III PERANCANGAN SISTEM
3.1 Tahap Perancangan Model Kecepatan Motor DC Berbasis Fuzzy Logic Controller.
ix
3.1.1 Perancangan Model Blok Motor DC Dengan Matlab Simulink ... 15 3.1.2 Perancangan Model Subsystem Dengan Matlab Simulink………….. ... 19
3.1.3 Perancangan Model Fuzzy Logic Controller (FLC) Berkorespondensi dengan Motor DC.. ... 19
3.1.4 Perancangan Model Fuzzy Logic Controller (FLC) Berkorespondensi dengan Motor DC dan Workspace……….. ... .20
3.2 Perancangan Software Kecepatan Motor DC Berbasis Fuzzy Logic Controller. 21
3.2.1 Perancangan Input dan Output FIS Editor Pada Fuzzy Logic Controller.. 22
3.2.1.1 Perancangan Input FIS editor pada Fuzzy Logic Controller ... 22 3.2.1.1.1 Perancangan Membership function Input Pada FIS editor ... 23 3.2.1.2 Perancangan Output FIS editor Pada Fuzzy Logic Controller ... 25
3.2.1.2.1 Perancangan Membership function Output Pada FIS editor 26 3.2.2 Perancangan Rules pada FIS Editor.. ... 27
x
BAB V
5.1 Kesimpulan ... 37 5.2 Saran ... 38
1
BAB I PENDAHULUAN
1.1 Latar Belakang
Sebelum kita membahas mengenai bagaimana cara mengendalikan kecepatan Motor DC dengan menggunakan fuzzy logic, pertama-tama kita harus mengetahui apa itu Motor DC. Motor DC merupakan perangkat elektromagnetis yang mengubah energy listrik menjadi energy mekanik. Energi mekanik ini digunakan untuk, misalnya memutar impeller pompa, fan atau blower, menggerakkan kompresor, mengangkat bahan dll. Motor DC digunakan juga di rumah( mixer, bor listrik, fan angin ) dan di industri. Motor DC kadangkala disebut juga “kuda kerja” nya industri sebab diperkirakan bahwa motor-motor menggunakan sekitar 70% beban listrik total di industri.
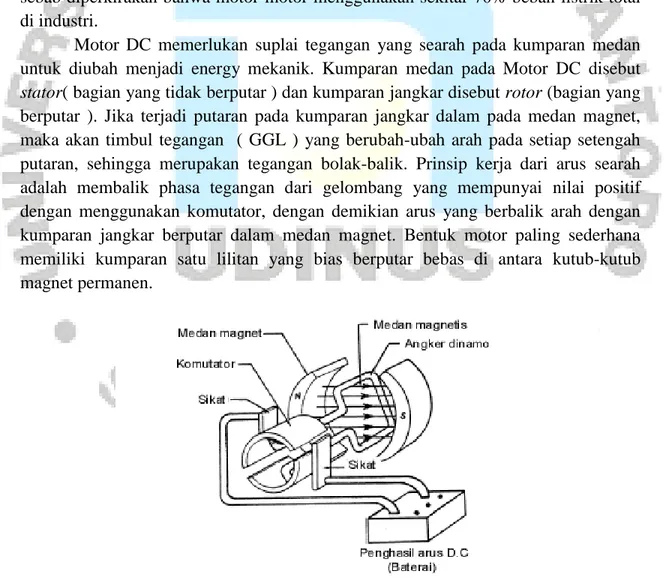
Motor DC memerlukan suplai tegangan yang searah pada kumparan medan untuk diubah menjadi energy mekanik. Kumparan medan pada Motor DC disebut stator( bagian yang tidak berputar ) dan kumparan jangkar disebut rotor (bagian yang berputar ). Jika terjadi putaran pada kumparan jangkar dalam pada medan magnet, maka akan timbul tegangan ( GGL ) yang berubah-ubah arah pada setiap setengah putaran, sehingga merupakan tegangan bolak-balik. Prinsip kerja dari arus searah adalah membalik phasa tegangan dari gelombang yang mempunyai nilai positif dengan menggunakan komutator, dengan demikian arus yang berbalik arah dengan kumparan jangkar berputar dalam medan magnet. Bentuk motor paling sederhana memiliki kumparan satu lilitan yang bias berputar bebas di antara kutub-kutub magnet permanen.
2
Catu tegangan DC dari baterai menuju ke lilitan melalui sikat yang menyentuh komutator, dua segmen yang terhubung dengan dua ujung lilitan. Kumparan satu lilitan pada gambar di atas disebut angker dinamo. Angker dynamo adalah sebutan untuk komponen yang berputar di antara medan magnet.
Stabilitas sistem tenaga telah menjadiperhatian utama dalam sebuah sistem operasi. Perhatian itu muncul dari fakta bahwa pada kondisi mantap ( steady-state ). Kecepatan rata-rata generator harus sama. Kondisi tersebut dinamakan operasi sarsinkron dari suatu system interkoneksi. Gangguan kecil atau besar pada system tenaga berdampak pada operasi sinkron. Sebagai contoh dalam pendistribusian tenaga listrik, yaitu berupa perubahan frekuensi dan daya listrik yang tidak stabil akibat perubahan beban yang tidak teratur, baik berupa gangguan dinamis, maupun gangguan transient. Ketidakstabilan tersebut merupakan salah satu jenis gangguan yang signifikan pada system yang berdampak pada putaran primemover di pusat pembangkit. Apabila hal tersebut dibiarkan maka selain dapat merusak peralatan yang dicatu juga akan merusak primemover itu sendiri.
Untuk mengatasi permasalahan tersebut diperlukan suatu kontroler yang mempunyai performansi yang tinggi supaya putaran primemover konstan walaupun terjadi perubahan parameter pada beban. Kontrol konvensional sudah mampu mengatasi, namun rancangan dan model matematis sistemnya rumit, sehingga semakin tinggi tingkat presisi yang dimiliki maka akan semakin mahal. Untuk mendapat sebuah kontroler yang tidak terlalu memerlukan model system matematis, namun mempunyai biaya dan perawatan yang murah maka dikembangkan jenis kontroler yang berbasis Fuzzy Control.
Perkembangan system fuzzy semakin meningkat dengan beragam algoritma fuzzy yang ditawarkan, baik yang masih murni maupun yang telah dikombinasikan dengan algoritma system yang lain. Perkembangan ini tidak lepas dari keinginan untuk memperoleh pengendali dengan keandalan yang lebih tinggi dengan peralatan yang lebih minimal disbanding dengan pengendali sebelumnya ( mis. PID ). Logika fuzzy juga telah sukses diterapkan pada beberapa aplikasi kontrol. Pengontrol logika fuzzy menggunakan hubungan heuristic input-output untuk menangani sesuatu yang kompleks dan tidak menentu. Pengontrol logika fuzzy dapat bekerja pada situasi dimana variasi parameter dan struktur dari plant memiliki ketidakpastian yang besar.Pengontrol adaptif merupakan suatu pengontrol yang dapat mengubah parameter yang dimiliki dan mempunyai suatu mekanisme untuk penyetelan parameter- parameter tersebut.
3
1.2 Perumusan Masalah
Kestabilan dalam system daya listrik ditentukan oleh kemampuan berbagai komponen pembangkit dalam merespon setiap perubahan yang terjadi pada beban. Perubahan beban yang terjadi secara periodic seringkali tidak dapat direspon secara baik oleh primeover generator sehingga dapat mempengaruhi kestabilan sistem. Untuk mengatasi masalah tersebut dapat diatasi dengan mendesain sebuah kontroler, salah satunya dapat dikendalikan dengan fuzzy logic yang berbasis MATLAB.
1.3 Batasan Masalah
Agar penelitian menjadi terarah dan dapat member kejelasan terhadap permasalahan yang dibahas, maka perlu dilakukan pembatasan masalah. Dalam penelitian ini pembatasan masalah yang diberikan adalah :
1. Nilai set point tetap, dan beban juga tetap.
2. Membership function yang diujikan membership function 3 dan 5. 3. Tipe membership function yang dipakai tipe segitiga dan tipe trapezium.
4. Model system control disimulasikan dengan menggunakan software Simulink dari MATLAB versi 7.10.
1.4 Tujuan Penelitian
Tujuan yang ingin dicapai dalam penelitian ini yaitu, untuk :
1. Mendapatkan algoritma fuzzy logic controller yang tepat digunakan untuk mengatur putaran primeover
2. Membandingkan hasil simulasi dengan kinerja prototype kontroler primeover generator.
1.5 Manfaat Penelitian
Penelitian ini diharapkan dapat membantu menstabilkan perputaran primeover dari generator dengan cara yang lebih sederhana. Dan juga sebagai bukti bahwa fuzzy logic juga bisa digunakan untuk membantu mengatur putaran primeover generator.
1.6 Sistematika Penulisan
Pada penelitian ini pembahasan laporan terbagi menjadi 5 BAB dengan sistematika sebagai berikut :
4
BAB 1 :Pendahuluan
Berisi tentang latar belakang, perumusan masalah, batasan masalah, tujuan dan manfaat penelitian, metode penelitian dan sistematika penulisan
BAB 2 : Kajian Pusataka dan Dasat Teori
Berisi tentang dasar-dasar teori yang akan digunakan dalam penelitian.
BAB 3 : Metode Penelitian
Bab ini menjelaskan langkah-langkah penelitian dan diagram blok system kontrol motor DC yang diatur kecepatannya menggunakanFuzzy Logic Controller.
BAB 4 : Analisis Hasil
Bab ini menjelaskan tentang hasil implementasi dari desain kontroller motor DC dengan menggunakan Fuzzy Logic Controller yang disimulisikan menggunakan MATLAB versi 7.10.
BAB 5 : Penutup
Bab ini berisi tentang kesimpulan dan saran yang dapat membuat penelitian ini menjadi lebih baik.
5
BAB II
Tinjauan Pustaka
2.1 Motor DC
Motor DC merupakan motor listrik yang disuplai dari catu daya tegangan searah atau tegangan DC. Motor DC merupakan suatu perangkat elektromagnetis yang mengubah energi listrik menjadi energi mekanik. Energi mekanik dari motor ini seringkali digunakan di rumah - rumah pada penggunaan mixer, bor listrik, kipas angin, dll. Sedangkan pada industri, motor listrik digunakan untuk menggerakan kompresor, mengangkat material, dll. Motor listrik dalam dunia industri juga disebut “kuda kerja”, sebab penggunaan beban listriknnya yang cukup besar yaitu sekitar 70% dari penggunaan beban total [1].
Bagian- bagian motor DC berupa kumparan medan menerima energi listrik dari catu daya untuk diubah menjadi energi mekanik. Kumparan medan pada motor dc disebut stator (bagian yang tidak berputar) dan kumparan jangkar disebut rotor (bagian yang berputar). Jika terjadi putaran pada kumparan jangkar dalam pada medan magnet, maka akan timbul tegangan (GGL) yang berubah-ubah arah pada setiap setengah putaran, sehingga merupakan tegangan bolak-balik. Prinsip kerja dari arus searah adalah membalik phasa tegangan dari gelombang yang mempunyai nilai positif dengan menggunakan komutator, dengan demikian arus yang berbalik arah dengan kumparan jangkar yang berputar dalam medan magnet. Bentuk motor paling sederhana memiliki kumparan satu lilitan yang bisa berputar bebas di antara kutub-kutub magnet permanen.
6
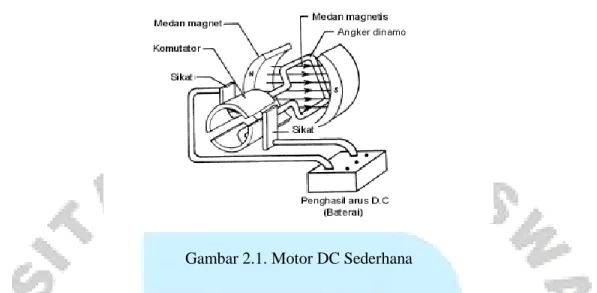
Gambar 2.1. Motor DC Sederhana
Catu tegangan dc dari baterai menuju ke lilitan melalui sikat yang menyentuh komutator, dua segmen yang terhubung dengan dua ujung lilitan. Kumparan satu lilitan pada gambar di atas disebut angker dinamo. Angker dinamo adalah sebutan untuk komponen yang berputar di antara medan magnet.
Agar proses perubahan energi mekanik dapat berlangsung secara sempurna, maka tegangan sumber harus lebih besar daripada tegangan gerak yang disebabkan reaksi lawan. Dengan memberi arus pada kumparan jangkar yang dilindungi oleh medan maka menimbulkan perputaran pada motor.
Sebuah motor menghasilkan keluaran berupa tenaga putar atau torque yang dipengaruhi oleh kecepatan motor tersebut, atau yang disebut juga dengan beban motor. Adapun beberapa kategori beban diantaranya:
1. Beban torque konstan adalah beban dimana permintaan keluaran energinya
bervariasi dengan kecepatan operasinya namun torquenya tidak bervariasi. Contoh beban dengan torque konstan adalah corveyors, rotary kilns, dan pompa displacement konstan.
7
2. Beban dengan variabel torque adalah beban dengan torque yang bervariasi
dengan kecepatn operasi. Contoh beban dengan variabel torque adalah pompa sentrifugal dan fan (torque bervariasi sebagai kuadrat kecepatan).
Peralatan Energi Listrik : Motor Listrik.
3. Beban dengan energi konstan adalah beban dengan permintaan torque yang
berubah dan berbanding terbalik dengan kecepatan. Contoh untuk beban dengan daya konstan adalah peralatan-peralatan mesin.
2.2 Fuzzy Logic Controller
Logika fuzzy atau logika kabur merupakan merupakan cara baru untuk menyelesaikan persoalan dunia nyata yang mengandung banyak ketidakpastian. Logika fuzzy ditemukan oleh Lotfi A. Zadeh. Logika fuzzy memiliki dasar seperti logika klasik, namun lebih umum dan lebih luas penerapannya karena menyediakan cara alami untuk mengatasi masalah ketidakpastian dalam ketiadaan kriteria yang ditetapkan berdasarkan keanggotaan kelas dari variable acak [2]. Himpunan fuzzy memetakan sebuah nilai yang merupakan anggota dari suatu himpunan yang bernilai atau memiliki derajat antara nol dan satu. Derajat keanggotaan nol, artinya nilai tersebut tidak termasuk dalam himpunan dan derajat keanggotaan satu berarti nilainya secara lengkap merepresentasikan himpunan tersebut. Fungsi keanggotaan digambarkan sebagai kurva yang melewati nilai dari nol sampai satu [3].
Dalam system kendali, logika fuzzy telah secara luas diaplikasikan. Sebagai contoh, sebuah system kendali fuzzy sederhana diperlihatkan pada Gambar 2.12. Langkah-langkah dalam pengendali fuzzy menurut Gambar 2.12, adalah sebagai berikut [2]
8
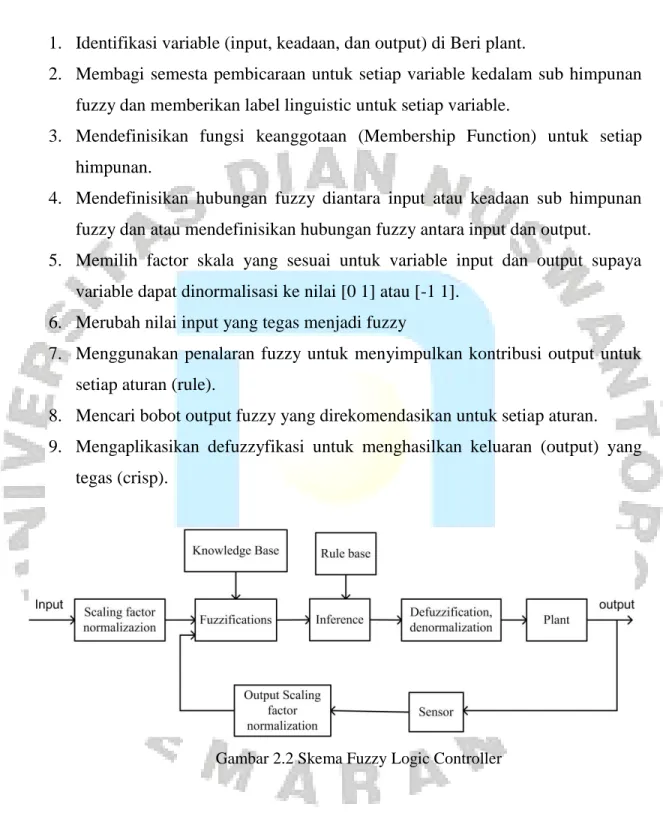
1. Identifikasi variable (input, keadaan, dan output) di Beri plant.
2. Membagi semesta pembicaraan untuk setiap variable kedalam sub himpunan fuzzy dan memberikan label linguistic untuk setiap variable.
3. Mendefinisikan fungsi keanggotaan (Membership Function) untuk setiap himpunan.
4. Mendefinisikan hubungan fuzzy diantara input atau keadaan sub himpunan fuzzy dan atau mendefinisikan hubungan fuzzy antara input dan output. 5. Memilih factor skala yang sesuai untuk variable input dan output supaya
variable dapat dinormalisasi ke nilai [0 1] atau [-1 1]. 6. Merubah nilai input yang tegas menjadi fuzzy
7. Menggunakan penalaran fuzzy untuk menyimpulkan kontribusi output untuk setiap aturan (rule).
8. Mencari bobot output fuzzy yang direkomendasikan untuk setiap aturan. 9. Mengaplikasikan defuzzyfikasi untuk menghasilkan keluaran (output) yang
tegas (crisp).
Gambar 2.2 Skema Fuzzy Logic Controller
Berikut ini adalah contoh aplikasi pengendali logika fuzzy (fuzzy logic controller). Pengendali logika fuzzy digunakan untuk otomasi mesin industry. Sebagai contoh, aplikasi logika fuzzy untuk mengendalikan proses tekanan. Pengendali dibentuk
9
melalui sejumlah aturan fuzzy (fuzzy rules) seperti; IF “error tekanan” adalah “Positive Big” atau “Positive Medium” dan laju perubahan eror tekanan adalah “Negative Small” THEN perubahan input panas adalah “Negative Medium”. Contoh ini diilustrasikan dalam 4 langkah berikut.
Langkah 1. Menentukan nilai input fuzzy dan variable output
Misalkan variable error (e) didefinisikan dengan 8 variabel linguistic, diberi nama A1, A2, …, A8, dibagi sebagai ruang error {-em +em] dan laju error (é atau de/dt)
yang didefinisikan oleh 7 variabel yang diberi nama B1, B2, …, B7, dibagi atas ruang laju arror dari [-ém + ém]. Jika di normalisasi rentang ini memiliki interval yang sama
[-a +a] oleh:
( ) (2.6)
́ ( ́ ) ́ (2.7)
Untuk error, delapan variable fuzzy Ai,(i=1,2,…,8) dengan variable PB (Positive Big), PM (Positive Medium), PS (Positive Short), P0 (Positive Zerro), N0 (Negative Zerro), NS (Negative Short), NM (Negative Medium), NB (. Negative Big). Untuk laju eror é, tujuh variable fuzzy, Bj, (j=1,2,3, …,7) dengan variebl linguistic PB, PM, PS, 0, NS, NM, NB. Fungsi keanggotaan untuk jumlah ini berada pada rentang [-a a], dimana a =6(a=6).
Variabel output fuzzy, kuantitas kontrol (z), akan menggunakan tujuh variable fuzzy pada semesta yang di normalisasi, z={-7, -6, -5, … , +7}. Variabel kontrol akan dideskripsikan oleh kuantitas kontrol linguistic fuzzy Ck, (k= 1,2, …, 7) yang merupakan bagian dari kontrol semesta.
Langkah 2. Ringkasan dari aturan – aturan kendali. Berdasarkan pengalaman oleh operator manusia, aturan kontrol dibentuk sebagai berikut :
10
If e adalah A1 dan é adalah B1,Then z adalah C11 If e adalah A1 dan é adalah B2,Then z adalah C12 If e adalah A1 dan é adalah Bj,Then z adalah C1j
Setiap aturan diterjemahkan kedalam relasi fuzzy R. Jika diketahui sin() = , dimana
diukur dalam radians. Relasi ini digunakan untuk linearisasi persamaan state space dan diperoleh:
( ) ( )
Jika dalam derajat dan dalam derajat / sekon, dengan memilih dan , linearisasi dan persamaan state space waktu diskret dapat di sajikan dalam bentuk matriks.
Untuk permasalahan ini diasumsikan semesta pembicaraan untuk dua variable menjadi dan , dps= degree per second.
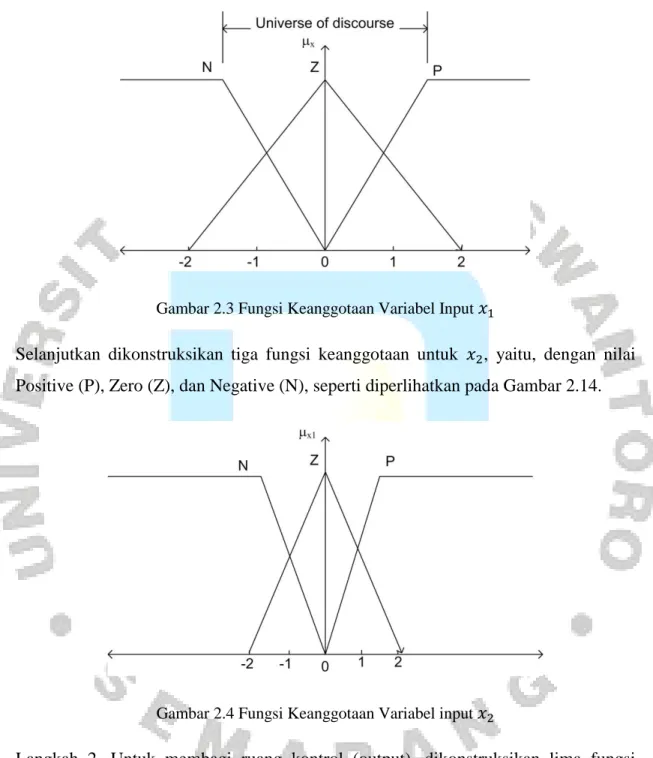
Langkah 1. Pertama-tama dikonstruksikan 3 fungsi keanggotaan untuk pada semestanya, yaitu, untuk nilai positive (P), Zero (Z), dan Negative (N), seperti terlihat pada Gambar 2.13.
11
Gambar 2.3 Fungsi Keanggotaan Variabel Input
Selanjutkan dikonstruksikan tiga fungsi keanggotaan untuk , yaitu, dengan nilai Positive (P), Zero (Z), dan Negative (N), seperti diperlihatkan pada Gambar 2.14.
Gambar 2.4 Fungsi Keanggotaan Variabel input
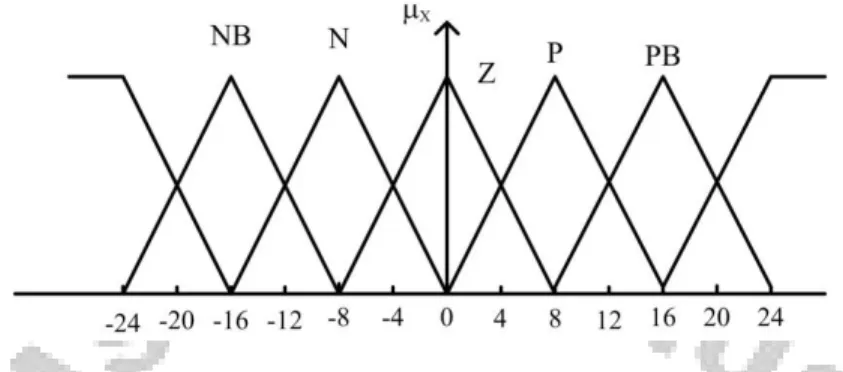
Langkah 2. Untuk membagi ruang kontrol (output), dikonstruksikan lima fungsi keanggotaan untuk , dimana , seperti diperlihakan pada Gambar 2.15. (Catatan, gambar memiliki 7 bagian namun hanya digunakan 5 untuk kasus ini).
12
Gambar 2.5 Tujuh Bagian Fungsi Keanggotaan (Yang digunakan hanya lima)
Langkah 4. Dengan menggunakan aturan yang disajikan pada Tabel 2.2, akan dilakukan simulasi untuk persoalan kendali. Dalam simulasi akan digunakan metode grafis untuk operasi fuzzy. Simulasi dimulai dengan kondisi awal tegas sebagai berikut :
dan
Simulasi dilakukan 4 siklus menggunakan persamaan matriks untuk step diskrit . Setiap siklus simulasi akan menghasilkan fungsi keanggotaan untuk dua variable input. Tabel Fuzzy Associative Memory (FAM) akan menghasilkan sebuah fungsi keanggotaan untuk kegiatan pengendalian, . Fungsi keanggotaan akan di defuzz menggunakan metode centroid dan kemudian digunakan persamaan diferensial rekursif untuk mendapatkan nilai dan . Setiap siklus simulasi setelah akan dimulai dengan nilai dan sebelumnya sebagai kondisi input untuk siklus selanjutnya dari persamaan deferensial rekursif.
13 Tabel 2.2 Fuzzy Associative Memory (FAM)
\ P Z N
P PB P Z
Z P Z N
N Z N NB
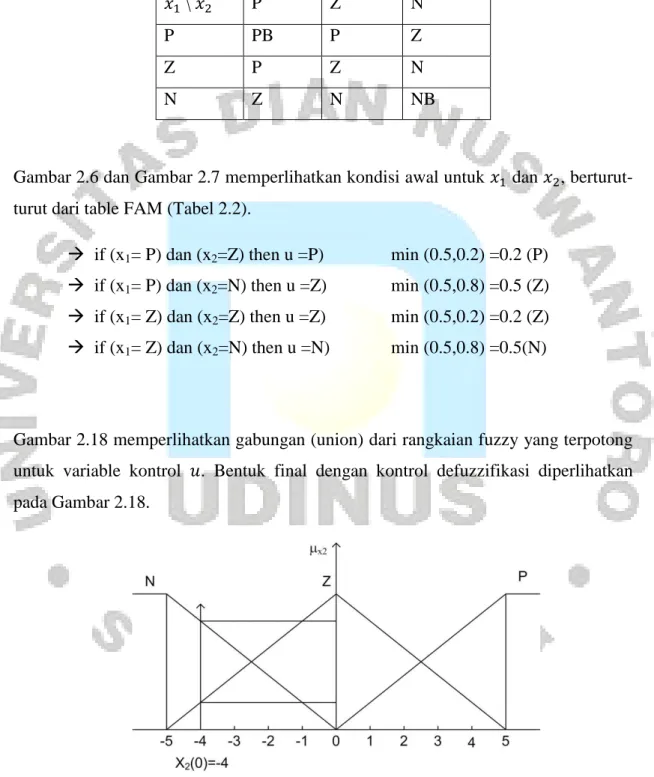
Gambar 2.6 dan Gambar 2.7 memperlihatkan kondisi awal untuk dan , berturut-turut dari table FAM (Tabel 2.2).
if (x1= P) dan (x2=Z) then u =P) min (0.5,0.2) =0.2 (P)
if (x1= P) dan (x2=N) then u =Z) min (0.5,0.8) =0.5 (Z)
if (x1= Z) dan (x2=Z) then u =Z) min (0.5,0.2) =0.2 (Z)
if (x1= Z) dan (x2=N) then u =N) min (0.5,0.8) =0.5(N)
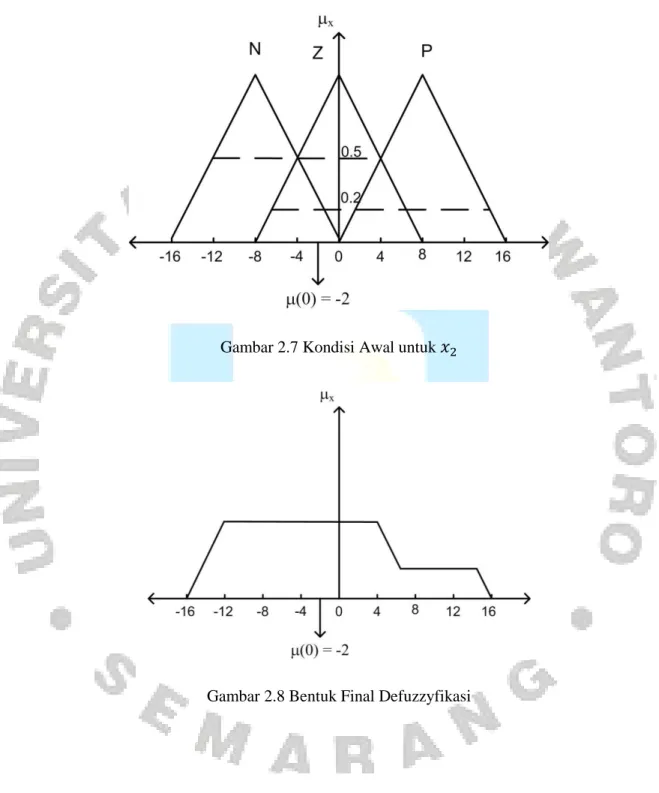
Gambar 2.18 memperlihatkan gabungan (union) dari rangkaian fuzzy yang terpotong untuk variable kontrol . Bentuk final dengan kontrol defuzzifikasi diperlihatkan pada Gambar 2.18.
14
Gambar 2.7 Kondisi Awal untuk
15
BAB III
PERANCANGAN SISTEM
3.1 Tahap Perancangan Model Kecepatan Motor DC Berbasis Fuzzy Logic
Controller.
3.1.1 Perancangan Model Blok Motor DC Dengan Matlab Simulink
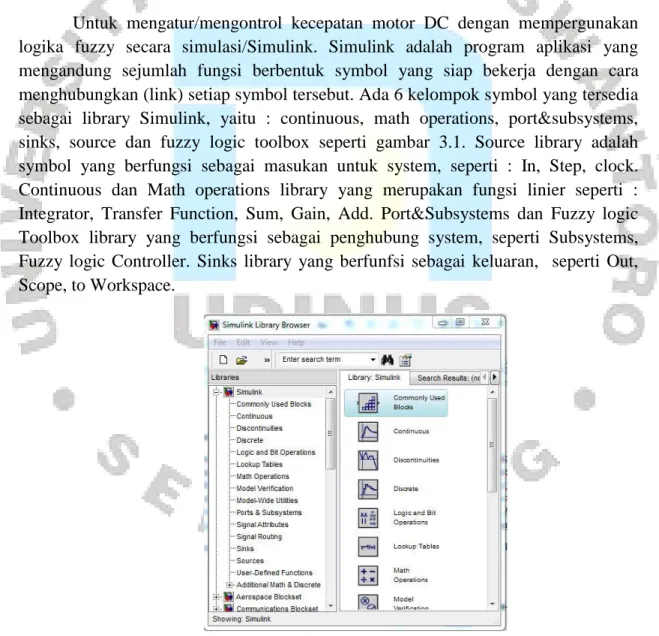
Untuk mengatur/mengontrol kecepatan motor DC dengan mempergunakan logika fuzzy secara simulasi/Simulink. Simulink adalah program aplikasi yang mengandung sejumlah fungsi berbentuk symbol yang siap bekerja dengan cara menghubungkan (link) setiap symbol tersebut. Ada 6 kelompok symbol yang tersedia sebagai library Simulink, yaitu : continuous, math operations, port&subsystems, sinks, source dan fuzzy logic toolbox seperti gambar 3.1. Source library adalah symbol yang berfungsi sebagai masukan untuk system, seperti : In, Step, clock. Continuous dan Math operations library yang merupakan fungsi linier seperti : Integrator, Transfer Function, Sum, Gain, Add. Port&Subsystems dan Fuzzy logic Toolbox library yang berfungsi sebagai penghubung system, seperti Subsystems, Fuzzy logic Controller. Sinks library yang berfunfsi sebagai keluaran, seperti Out, Scope, to Workspace.
16
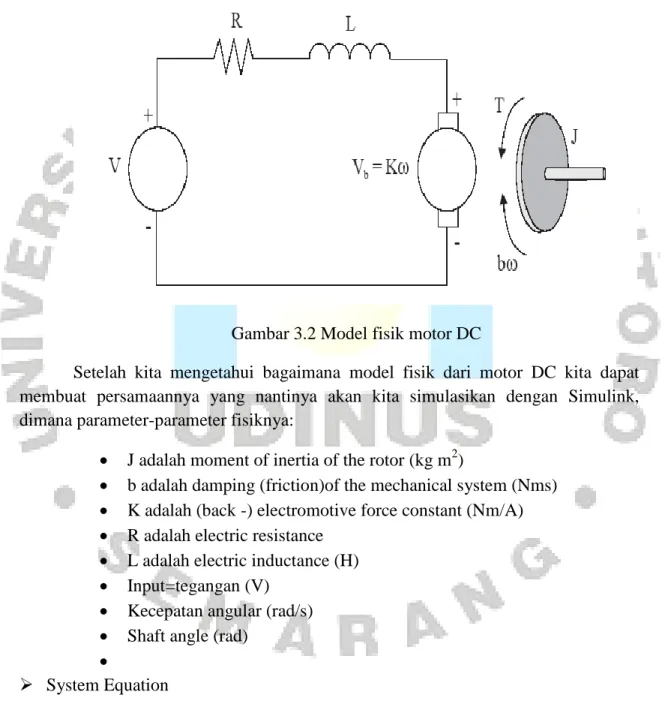
Untuk memulai simulasi pertama-tama kita harus membuat rangkaian motor DC seperti Gambar 3.3 yang nantinya akan dimasukkan ke dalam subsystems. Dimana model motor DC tersebut didapat dari persamaan matematika. Berikut adalah model fisik motor DC.
Gambar 3.2 Model fisik motor DC
Setelah kita mengetahui bagaimana model fisik dari motor DC kita dapat membuat persamaannya yang nantinya akan kita simulasikan dengan Simulink, dimana parameter-parameter fisiknya:
J adalah moment of inertia of the rotor (kg m2)
b adalah damping (friction)of the mechanical system (Nms)
K adalah (back -) electromotive force constant (Nm/A)
R adalah electric resistance
L adalah electric inductance (H)
Input=tegangan (V)
Kecepatan angular (rad/s)
Shaft angle (rad)
System Equation
Torka motor berhubungan dengan arus armatur i dan faktor konstanta K.
17 Ki T (1) dt d K Kw Vb (2)
Persamaan Berdasar Hk Newton dan Kirchoff
Ki dt d b dt d J 2 2 , (3) dt d K V Ri dt di L , (4) Transfer Function Dari (3) dan (4) ) ( ) ( ) ( 2 s KI s bs s Js , (5) ) ( ) ( ) ( ) (s RI s V s Ks s LsI , (6) Transformasi Laplace dr (6) Ls R s Ks s V s I ( ) ( ) ) ( , (7)
Substitusikan (5) sehingga menjadi:
Ls R s Ks s V K s bs s Js ( ) ( ) ( ) ) ( 2 . (8)
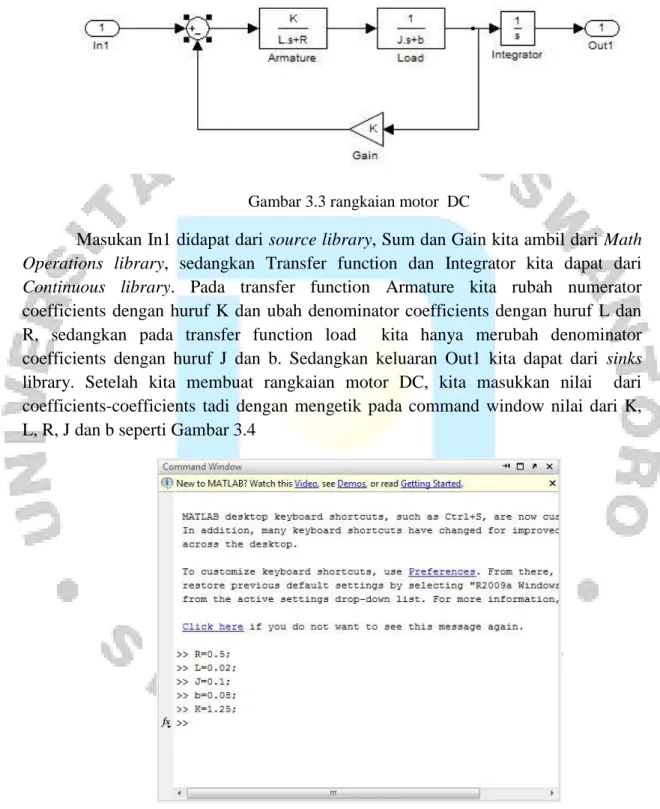
Dari persamaan diatas nantinya akan dibuat simulasi rangkaian motor DC dengan Simulink seperti Gambar 3.3.
18
Gambar 3.3 rangkaian motor DC
Masukan In1 didapat dari source library, Sum dan Gain kita ambil dari Math Operations library, sedangkan Transfer function dan Integrator kita dapat dari Continuous library. Pada transfer function Armature kita rubah numerator coefficients dengan huruf K dan ubah denominator coefficients dengan huruf L dan R, sedangkan pada transfer function load kita hanya merubah denominator coefficients dengan huruf J dan b. Sedangkan keluaran Out1 kita dapat dari sinks library. Setelah kita membuat rangkaian motor DC, kita masukkan nilai dari coefficients-coefficients tadi dengan mengetik pada command window nilai dari K, L, R, J dan b seperti Gambar 3.4
19
3.1.2 Perancangan Model Subsystem Dengan Matlab Simulink
Setelah itu Copy paste semua rangkaian motor DC diatas kedalam subsystems seperti Gambar 3.5, dengan langkah-langkah sebagai berikut :
Buka Simulink Library Browser. Pilih Port & Subsystem.
Setelah itu Pilih Subsystem seperti Gambar 3.5.
Kemudian Kita copy semua diagram blok rangkaian motor DC pada Gambar 3.3.
Paste semua diagram blok rangkaian motor DC pada Blok subsystem.
Gambar 3.5 Tampilan Simulink subsystem
3.1.3 Perancangan Model Fuzzy Logic Controller (FLC) Berkorespondensi dengan Motor DC
Setelah kita copy rangkaian motor DC dalam subsystems kemudian kita buat rangkaian untuk mengendalikan motor DC dengan Fuzzy logic controller seperti Gambar 3.6, dengan langkah-langkah sebagai berikut :
Cari Fuzzy Logic Controller pada Simulink Library browser, pilih Fuzzy Logic Toolbox, kemudian pilih Fuzzy Logic Controller.
Cari fungsi Add pada Simulink Library browser, Math Operations, ganti salah satu “+” dengan “-“.
Hubungkan output Add dengan inputan Fuzzy Logic Controller, dan outputan Fuzzy Logic Controller dengan inputan Subsystem.
Hubungkan outputan Subsystem dengan input negative pada fungsi Add. Input positif pada fungsi Add kita beri inputan Step yang di ambil dari
Simulink Library browser, sources, kemudian pilih Step.
Masukkan juga blok Scope yg kita ambil dari Simulink Library browser, sinks, pilih Scope, hubungkan dengan outputan Subsystem.
20
Gambar 3.6 Simulasi rangkaian Motor DC berkorespondeensi dengan fuzzy logic controller
3.1.4 Perancangan Model Fuzzy Logic Controller (FLC) Berkorespondensi dengan Motor DC dan Workspace
Untuk mendapatkan outputan berupa sinyal yang jelas kita harus menambahkan blok Workspace dan Clock. Adapun cara yang dilakukan adalah sebagai berikut :
Pada Gambar 3.6 kita menambahkan blok workspace dan blok clock.
Blok workspace kita ambil dari Simulink Library browser, sinks, kemudian pilih workspace.
Blok clock kita ambil dari Simulink Library browser, sources, kemudian pilih clock.
Buat 2 workspace, yang pertama hubungkan dengan outputan subsystem, yang kedua hubungkan dengan clock (seperti gambar 3.7).
Kemudian ubah nama workspace yang terhubung dengan output subsystem pada variable name dengan nama angular 1, dan ubah save format menjadi array (seperti gambar 3.8).
Ubah workspace yang terhubung dengan clock dengan nama t1, dan ubah save format menjadi array.
Gambar 3.7 simulasi rangkaian Motor DC berkorespondensi dengan fuzzy logic controller dan workspace
21
Gambar 3.8 Sink block parameter : To workspace
3.2 Perancangan Software Kecepatan Motor DC Berbasis Fuzzy Logic
Controller
Sebelum kita menjalankan / RUN system diatas, pertama-tama kita harus membuat FIS editor dengan cara mengetik Fuzzy pada command window kemudian enter. Akan muncul tampilan seperti Gambar 3.9 di bawah ini.
22
3.2.1 Perancangan Input dan Output FIS Editor Pada Fuzzy Logic Controller 3.2.1.1 Perancangan Input FIS Editor Pada Fuzzy Logic Controller
Pada penelitian ini kita membutuhkan 2 inputan, karena itu kita tambahkan input dengan klik pada tulisan edit, kemudian pilih add variable pilih input. Tampilan akan berubah dengan ada 2 inputan pada FIS editor seperti Gambar 3.10 di bawah ini.
Gambar 3.10 Tampilan FIS editor
Setelah itu kita dapat mengganti nama pada input dengan mengklik 1 kali pada input, dan ganti nama input pada kolom current variable name. Pada input 1 kita beri nama error dan input 2 kita beri nama derror, hasilnya akan tampak seperti Gambar 3.11.
23
Gambar 3.11 Tampilan Input
3.2.1.1.1 Perancangan Membership Function Input pada FIS Editor
Kita dapat menambah fungsi keanggotaan ( membership function), biasanya membership defaultnya adalah 3 membership function seperti Gambar 3.12. Dalam penelitian ini penulis menggunakan 5 membership function. Adapun cara untuk mengubah membership function dengan cara sebagai berikut :
Hapus terlebih dahulu membership function defaultnya.
Klik edit kemudian pilih add Mfs tampilan akan seperti Gambar 3.13. kita dapat menambah fungsi keanggotaan sesuai yang kita butuhkan
24
Gambar 3.12 Tampilan membership function Input editor 3mfs (default)
25
Pada percobaan ini penulis menggunakan 5 fungsi keanggotaan, jadi pada number of MFs dirubah menjadi 5 kemudian OK. Membership function pada input error kan berubah seperti Gambar 3.14.
Gambar 3.14 Tampilan 5 membership functions Input
Pengaturan untuk membuat membership function inputan derror sama seperti langkah-langkah membuat membership function inputan error. Kita juga dapat merubah tipe dari membership function Input dengan mengganti pada kolom current membership function type, dimana type yang digunakan dalam penelitian ini menggunakan type trimf ( segitiga) dan trapmf (trapezium).
3.2.1.2 Perancangan output FIS Editor Pada Fuzzy Logic Controller
Perancangan output pada FIS editor hampir sama dengan perancangan pada input, tetapi output yang dibutuhkan dalam penelitian ini hanya satu. Seperti pada Gambar 3.8 kita ganti nama output 1 dengan cara mengklik 1 kali pada output 1 dan ganti nama pada kolom current variable name dengan nama kecepatan, hasilnya akan seperti Gambar 3.15.
26
Gambar 3.15 Tampilan Output
3.2.1.2.1 Perancangan Membership Function Output pada FIS
Editor
Sama seperti halnya dengan input, kita juga dapat menambah membership function pada output sesuai dengan yang kita kehendaki. Biasanya membership function default pada output adalah 3 membership function seperti pada input (lihat Gambar 3.16)
Gambar 3.16 Tampilan membership function Output editor dengan 3mfs (default)
27
Dalam penelitian ini penulis menggunakan 5 membership function. Adapun cara untuk mengubah membership function dengan cara sebagai berikut :
Hapus terlebih dahulu membership function defaultnya.
Klik edit kemudian pilih add Mfs tampilan akan seperti Gambar 3.13. kita dapat menambah fungsi keanggotaan sesuai yang kita butuhkan
pada number of MFs.
Sehingga output akan tampak seperti Gambar 3.17 di bawah.
Gambar 3.17 Tampilan 5 membership functions Output
Seperti halnya sama dengan input, kita dapat merubah type dari output dengan mengganti type pada kolom current membership function type. Dimana type yang digunakan adalah type trimf (segitiga) dan trapmf (trapezium).
28
3.2.2 Perancangan Rules pada FIS Editor
Setelah kita buat Input, Output, dan Membership function, kita harus membuat rules atau aturan yang akan digunakan dengan cara sebagai berikut :
Klik edit kemudian pilih rules tampilan akan seperti Gambar 3.18. Kita akan membuat rules dengan 5 fungsi keanggotaan yaitu sangat
lambat, lambat, zero,cepat, sangat cepat
Gambar 3.18 Rules editor
Setelah kita membuat rules atau aturan kita save FIS editor yang telah kita buat tadi dengan klik file kemudian pilih export-to file, kita beri nama FIS editor sesuai kehendak kita. Selain export-to file kita juga harus menyimpan FIS editor tadi dalam bentuk work space. Caranya sama dengan langkah pertama tapi pada pilihan export kita pilih to work space- OK. Kemudian kita kembali menuju ke diagram rangkaian Fuzzy logic controller pada Gambar 3.7, dimana kita akan menjalankan
29
program tersebut. Tetapi kita harus memanggil terlebih dahulu FIS editor yg telah kita buat tadi. Klik dua kali pada Fuzzy logic controller sehingga muncul tampilan seperti Gambar 3.19, kemudian ketikkan nama FIS editor yang telah kita buat tadi pada FIS file or structure di sini penulis mengetik MOTORCR2 sesuai dengan nama FIS editor yang disimpan tadi. Setelah semua langkah-langkah diatas selesai kita tinggal menjalankan atau RUN program.
Gambar 3.19 Function block parameters : Fuzzy logic controlle
Jika tidak ada error kita bisa langsung melihat sinyal output dari blok rangkaian motor DC diatas apakah bisa stabil atau tidak.
30
ANALISIS HASIL
Pada penelitian ini penulis melakukan beberapa percobaan dengan menggunakan variasi beban tetap, dengan nilai R, L, J, b, K yang sudah ditentukan dan tetap. Dimana nilai R=0,5; L=0,02; J=0,1; b=0,08; K=1,25, dengan menggunakan beberapa membership function (fungsi keanggotaan) 3, 4, 5, dan 7. Disini penulis mencoba membanding hasil yang terbaik dari beberapa membership function yang telah dicoba. dalam penelitian ini penulis menggunakan 2 tipe pada membership function, tipe segitiga dan tipe trapezium. Berikut adalah hasil dari beberapa penelitian dengan membership function yang berbeda-beda :
1. Pemodelan dan simulasi kecepatan motor DC berbasisi Fuzzy logic controller dengan 3 Membership function ( Fungsi Keanggotaan) dimana pada penelitian menggunakan 2 tipe.
a) 3mfs dengan tipe segitiga menghasilkan grafik kecepatan sudut seperti Gambar 4.1 berikut :
Gambar 4.1 Grafik kecepatan sudut tipe segitiga 3mfs
Dimana kecepatan motor DC stabil pada kecepatan 0,999rad/s dan membutuhkan waktu 275.1s untuk mencapai kestabilan. Bisa dikatakan butuh waktu yang tidak terlalu cepat untuk mendapatkan titik stabil dari motor DC. Berikut adalah Tabel kecepatan sudut dan waktu dari motor dc sampai menuju kestabilan. Lihat Tabel 4.1
31
Tabel 4.1 Tabel kecepatan motor DC menuju stabil tipe sgitiga dengan 3mfs Kecepatan Sudut Motor DC (rad/s) Waktu
(s) 0 0 0,145 1,37 0,2 1,547 0,3 1,965 0,4 2,551 0,5 3,394 0,6 4,672 0,7 6,79 0,8 10,91 0,9 22,35 0,9592 50,05 0,97 63,87 0,9839 100 0,999 275,1
b) 3mfs dengan tipe trapezium menghasilkan grafik kecepatan sudut seperti Gambar 4.2:
32
Seperti terlihat pada grafik kecepatan sudut diatas, dimana kecepatan mengalami kestabilan saat kecepatan 0,9rad/s dan membutuhkan waktu 79,88s untuk mendapatkan kecepatan putaran yang stabil. Berikut Tabel hasil grafik kecepatan sudut dengan 3 membership function tipe trapezium. Lihat Tabel 4.2
Tabel 4.2 Tabel kecepatan motor DC menuju stabil tipe trapezium dengan 3mfs Kecepatan sudut Motor DC (rad/s) Waktu
(s) 0 0 0,12 1,25 0,2 1,423 0,3 1,733 0,4 2,187 0,5 2,864 0,6 3,933 0,7 5,805 0,8 9,937 0,9 79,88
Dari dua hasil grafik kecepatan sudut dengan 3 membership function pada Gambar 4.1 dan Gambar 4.2 diatas dapat dilihat bahwa membership function dengan tipe segitiga untuk mencapai titik stabil terjadi pada saat kecepatan sudut 0,999rad/s dan waktu 275,1s, sedangkan tipe trapezium pada saat kecepatan sudut 0,9rad/s dan waktu 79,88s. Dengan ini dapat dilihat bahwa membership function dengan tipe segitiga lebih baik untuk mencapai titik stabil. Yaitu pada saat kecepatan 0.999rad/s (mendekati 1) dalam waktu 275,1s.
2. Pemodelan dan simulasi kecepatan motor DC berbasisi Fuzzy logic controller dengan 5 Membership function ( Fungsi Keanggotaan) dimana pada penelitian menggunakan 2 tipe.
a) Simulasi dengan menggunakan Fuzzy logic controller dengan 5 membership function dengan tipe segitiga menghasilkan grafik seperti pada Gambar 4.5.
33
Gambar 4.5 Grafik kecepatan sudut tipe segitiga 5mfs
Grafik yang dihasilkan dari simulasi dengan 5 membership function tipe segitiga dapat dilihat bahwa motor DC mencapai titik stabil yang sempurna pada saat kecepatan 1rad/s dan waktu 10,69s. Seperti terlihat pada Tabel 4.3 dibawah.
Tabel 4.3 Tabel kecepatan motor DC menuju stabil tipe segitiga dengan 5mfs Kecepatan sudut Motor DC
(rad/s) Waktu (s) 0 0 0,1 1,192 0,2 1,394 0,3 1,618 0,4 1,86 0,5 2,114 0,6 2,401 0,7 2,779 0,8 3,286 0,9 4,057 1 10,69
b) Simulasi dengan menggunakan Fuzzy logic controller dengan 5 membership function dengan tipe trapesium menghasilkan grafik seperti pada Gambar 4.6.
34
Gambar 4.6 Grafik kecepatan sudut tipe trapezium 5mfs
Dari simulasi kecepatan motor DC Pada Gambar 4.6 diatas untuk menghasilkan kecepatan motor yang stabil pada posisi kecepatan 0,95rad/s membutuhkan waktu 9,218s untuk stabil, seperti terlihat pada Tabel 4.4 dibawah.
Tabel 4.4 Tabel kecepatan motor DC menuju stabil tipe trapezium dengan 5mfs Kecepatan sudut Motor DC (rad/s) Waktu
(s) 0 0 0,1 1,18 0,2 1,366 0,3 1,583 0,4 1,824 0,5294 2,154 0,6 2,339 0,7 2,688 0,8 3,195 0,95 9,218
Dilihat dari hasil grafik simulasi kecepatan motor DC berbasis Fuzzy logic controller dengan 5 membership function dengan tipe segitiga dan tipe trapezium pada Gambar 4.5 dan 4.6. Pada tipe segitiga kecepatan sudut saat stabil adalah pada kecepatan 1rad/s dan membutuhkan waktu 10,69s dan tipe trapezium stabil pada kecepatan sudut 0,95 dan waktu 9,218s. Jadi dapat dilihat bahwa simulasi kecepatan motor DC berbasis Fuzzy logic controller dengan 5 membership function dengan tipe segitiga dan tipe trapezium, hasil yang didapat lebih bagus
35
dengan tipe segitiga karena mencapai kestabilan yang sempurna pada kecepatan sudut 1rad/s dalam waktu 10,69s.
Dari membership function Fuzzy logic controller yang sudah dicoba, 3 membership function dan 5 membership function dapat menghasilkan kecepatan stabil.
Selain tipe kita juga harus menentukan rules ( Aturan- aturan Fuzzy ) yang akan kita pakai dalam penelitian, dan rules yang kita buat sebagai berikut (Gambar 4.9 dan Gambar 4.10 ) :
1. Rules (Aturan-aturan Fuzzy) untuk 3 membership function
error derror
Negatif Zerro Positif Negatif Lambat Lambat Zerro
Zerro Lambat Zerro Cepat Positif Zerro Cepat Cepat
Gambar 4.9 Rules (Aturan-aturan Fuzzy) 3 membership function 1. If(error is Negatif) and (derror is Negatif) then (kecepatan is Lambat) 2. If(error is Negatif) and (derror is Zerro) then (kecepatan is Lambat) 3. If(error is Negatif) and (derror is Positif) then (kecepatan is Zerro) 4. If(error is Zerro) and (derror is Negatif) then (kecepatan is Lambat) 5. If(error is Zerro) and (derror is Zerro) then (kecepatan is Zerro) 6. If(error is Zerro) and (derror is Positif) then (kecepatan is Cepat) 7. If(error is Positif) and (derror is Negatif) then (kecepatan is Zerro) 8. If(error is Positif) and (derror is Zerro) then (kecepatan is Cepat) 9. If(error is Positif) and (derror is Positif) then (kecepatan is Cepat)
36
2. Rules (Aturan-aturan Fuzzy) untuk 5 membership function error
derror
Big Negatif
Negatif Zerro Positif Big Positif
Big Negatif Sangat lambat Sangat lambat Sangat lambat Lambat Zerro Negatif Sangat lambat
Lambat Lambat Zerro Cepat Zerro Sangat
lambat
Lambat Zerro Cepat Sangat cepat Positif lambat Zerro Cepat Cepat Sangat
cepat Big Positif Zerro Cepat Sangat
cepat
Sangat cepat
Sangat cepat
Gambar 4.10 Rules ( Aturan-aturan Fuzzy ) 5 membership function
1. If(error is Big_Negatif) and (derror is Big_Negatif) then (kecepatan is sgt_lbt) 2. If(error is Big_Negatif) and (derror is Negatif) then (kecepatan is sgt_lbt) 3. If(error is Big_Negatif) and (derror is zerro) then ( kecepatan is sgt_lbt) 4. If(error is Big_Negatif) and (derror is Positif) then (kecepatan is lbt)
5. If(error is Big_Negatif) and (derror is Big_Positif) then (kecepatan is zerro) 6. If(error is Negatif) and (derror is Big_Negatif) then (kecepatan is sgt_lbt) 7. If(error is Negatif) and (derror is Negatif) then (kecepatan is lbt)
8. If(error is Negatif) and (derror is zerro) then (kecepatan is lbt) 9. If(error is Negatif) and (derror is Positif) then (kecepatan is zerro) 10. If(error is Negatif) and (derror is Big_Positif) then (kecepatan is cpt) 11. If(error is zerro) and (derrror is Big_Negatif) then (kecepatan is sgt_lbt) 12. If(error is zerro) and (derror is Negatif) then (kecepatan is lbt)
13. If(error is zerro) and (derror is zerro) then (kecepatan is zerro) 14. If(error is zerro) and (derror is Positif) then (kecepatan is cpt)
15. If(error is zerro) and (derror is Big_positif) then (kecepatan is sgt_cpt) 16. If(error is Positif) and (derror is Big_Negatif) then (kecepatan is sgt_lbt) 17. If(error is Positif) and (derror is Negatif) then (kecepatan is zerro) 18. If(error is Positif) and (derror is zerro) then (kecepatan is cpt)
37
19. If(error is Positif) and (derror is Positif) then (kecepatan is cpt)
20. If(error is Positif) and (derror is Big_Positif) then (kecepatan is sgt_cpt) 21. If(error is Big_Positif) and (derror is Big_Negatif) then (kecepatan is zerro) 22. If(error is Big_Positif) and (derror is Negatif) then (kecepatan is cpt) 23. If(error is Big_Positif) and (derror is zerro) then (kecepatan is sgt_cpt) 24. If(error is Big_Positif) and (derror is Positif) then (kecepatan is sgt_cpt) 25. If(error is Big_Positif) and (derror is Big_Positif) then (kecepatan is sgt_cpt)
Setelah kita membuat rules yang akan digunakan dalam penelitian / simulasi kita dapat melihat bentuk rules yang sudah kita buat / View rules seperti Gambar 4.10
38
BAB V PENUTUP
5.1 Kesimpulan
Berdasarkan dari Pemodelan dan simulasi kecepatan motor DC berbasis Fuzzy Logic Controller dengan beberapa membership function yaitu 3 dan 5 membership function ( fungsi keanggotaan ) dengan variasi beban tetap maka dapat disimpulkan :
1. Fuzzy logic controller dengan 3 dan 5 membership function dapat digunakan untuk menstabilkan kecepatan motor DC. Pada Fuzzy logic controller dengan 3 membership function untuk mencapai kestabilan kecepatan motor DC pada tipe segitiga terjadi saat kecepatan sudut 0,999rad/s dan nmembutuhkan waktu 275,1s dan pada tipe trapezium terjadi saat kecepatan sudut 0,9rad/s dan membutuhkan waktu 79,88s, sedangkan pada fuzzy logic controller dengan 5 membership function dengan tipe segitiga untuk mendapatkan kecepatan stabil sempurna terjadi saat kecepatan sudut 1rad/s dan membutuhkan waktu 10,69s, pada tipe trapezium untuk mendapatkan kecepatan yang stabil terjadi pada saat kecepatan sudut 0,95rad/s dan waktu 9,218s.
2. Pada membership function 3 dan 5 dapat dilihat bahwa membership function dengan tipe segitiga yang paling bagus mencapai kecepatan stabil yang bagus, dan jika dibandingkan antara 3 membership function dengan 5 membership function bisa dikatakan fuzzy logic controller dengan 5 membership function dengan tipe segitiga yang paling bagus kestabilannya dan membutuhkan waktu yang cepat. Untuk mencapai kecepatan sudut 1rad/s membutuhkan waktu 10,69s.
Jadi Pemodelan dan Simulasi kecepatan motor DC berbasis Fuzzy logic controller dengan 5 fungsi keanggotaan (membership function) bisa menghasilkan kestabilan kecepatan yang bagus (sempurna) dan dalam waktu yang relatif lebih cepat.
39
5.2 Saran
Setelah melakukan penelitian, penulis memberikan saran untuk mendapatkan kecepatan motor DC yang lebih cepat mencapai titik kestabilan.Kita bisa coba dengan beberapa variasi beban sampai mencapai tingkat dan waktu kestabilan yang terbaik.
40
Daftar Pustaka
[1] Zuhal, Dasar Teknik Tenaga Listrik dan Elektronika Daya. Jakarta: Gramedia, 1998.
[2] T. J. Ross, Fuzzy logic with engineering applications, 3rd ed. Chichester, U.K: John Wiley, 2010.
[3] Yong-Hua Song and A. T. Johns, “Applications of fuzzy logic in power systems. Part 1: General introduction to fuzzy logic,” Power Eng. J., vol. 11, no. 5, pp. 219–222, Oct. 1997.