Alat Ukur Tinggi Tubuh Manusia Menggunakan Kamera
Berbasis Template Matching
Muhamad Rido
1, Rizki Dian Rahayani, S.T., M.T
2dan Wakhyu, S.T., M.T
3 1) Jurusan Teknik Elektro Telekomunikasi, Politeknik Caltex Riau, Pekanbaru 28265, email:mo c h r i d ho 1 9 @ g ma i l . c o m
2) Jurusan Teknik Elektro Telekomunikasi, Politeknik Caltex Riau, Pekanbaru 28265, email: [email protected]
3) Jurusan Teknik Elektro Telekomunikasi, Politeknik Caltex Riau, Pekanbaru 28265, email:
ABSTRAK
Alat ukur tinggi telah banyak beredar di pasaran dan kebanyakan dari alat ukur tinggi yang ada di pasaran penggunaanya masih manual. Pada tugas akhir ini dirancang sebuah alat ukur tinggi menggunakan kamera berbasis template matching. Template matching adalah salah satu teknik dalam pengolahan citra digital yang berfungsi untuk mencocokan tiap-tiap bagian dari suatu citra dengan citra yang menjadi sampel (template). Sebuah citra dapat di tentukan tingginya dengan menghitung perbandingan baris pixel background dan baris pixel objek drawing. Metode ini cocok untuk perhitungan tinggi dengan akurasi error < 5 % namun tidak bisa digunakan pada pengukuran berat karena memiliki nilai error >50%.
Kata kunci: Template maching, citra, pixel..
ABSTRACT
High measuring devices have many in the market and most of the high measuring devices on the market use is still manual . In this final project designed a high measurement tool using a camera -based template matching . Template matching is one of the techniques in digital image processing that serves to match each part of an image with the image of the sample ( template ) . An image can be determined by calculating the ratio of the high background pixel rows and rows of pixels the object drawing . This method is suitable for high accuracy calculation error < 5 % but can not be used in the measurement of weight because it has an error value > 50 % . Keywords : Template maching, citra, pixel.
1. PENDAHULUAN
Alat ukur tinggi merupakan suatu hal yang sering di gunakan untuk menentukan parameter suatu objek. Alat ukur tinggi yang beredar di pasaran telah banyak dengan berbagai merek dan ukuran namun, kebanyakan dari alat ukur tinggi yang beredar di pasaran masih bersifat manual. Artinya untuk mendapatkan data tinggi masih menggunakan cara pengukuran dengan tenaga manusia.
Pengukuran secara manual tidak efisien karena dalam proses mengukur tinggi harus ada operator untuk mengukur tinggi juga untuk melihat hasil pengukuran. Dalam pengukuran manual tingkat ketelitian dan ketepatan dalam membaca skala ukur oleh manusia biasanya bisa berubah ubah, Bahkan sering terjadi human error.
Kemajuan teknologi saat ini memungkinkan untuk membuat alat yang otomatis dan efektif sesuai kebutuhan yang di inginkan, bisa melakukan proses pengukuran tinggi, membaca hasil pengukuran, dan memberitahu hasil dari pengukuran tersebut. Sehingga tinggi tubuh dapat
di ketahui secara langsung dengan efektif dan efisien tanpa pengukuran manual.
Berdasarkan uraian di atas maka penulis ingin merancang sebuah alat ukur tinggi otomatis yang lebih efektif dan efisien dalam penggunaanya yaitu “alat ukur tinggi menggunakan kamera berbasis template matching”.
2. LANDASAN TEORI 2.1 Penelitian Terdahulu
Untuk membantu dalam pengerjaan proyek ahir ini peneliti mengumpulkan referensi dari berbagai penelitian sebelumnya di antaranya dilakukan oleh Zulkhairi dari Teknik Informatika Multimedia Politeknik Caltex Riau yang menggunakan kamera digital pada perangkat mobile dengan konsep kesebangunan segitiga. Untuk proses pengambilan gambarnya dilakukan proses perpindahan maju mundur pada kamera untuk menentukan sudut-sudut istimewa pada kamera untuk kemudian di hitung dengan metode sinar istimewa pada lensa.
Juga Ti-Ho Wang, Ming-chih, Chen-Chien Hsu, Yin Yu Li dan Tsai dari Departement of Electronikc Engineering Sf. Jhon,s University, Departement of Electronikc Engineering Tamakang
University, dan Departement of Computer Science and Information Engineering Nation Central University berisikan metode untuk menghitung ruang jarak 3D dengan menggunakan kamera digital. Dengan metode pengukuran yang di gunakan adalah mempelajari jarak shotting camera dan jarak horizontal atau vertikal pada hasil capture[zulkhairi,2012].
Pada penelitian ini akan menggunakan Template matching adalah salah satu teknik dalam pengolahan citra digital yang berfungsi untuk mencocokan tiap-tiap bagian dari suatu citra dengan citra yang menjadi sampel. Prinsip metode ini adalah membandingkan antara citra streaming yang akan dikenali dengan citra sampel (template). Citra objek yang akan dikenali mempunyai tingkat kemiripan sendiri terhadap masing-masing citra sampel (template). Pengenalan dilakukan dengan melihat nilai tingkat kemiripan tertinggi dan nilai batas ambang pengenalan dari citra objek tersebut. Bila nilai tingkat kemiripan berada di bawah nilai batas ambang maka citra objek tersebut dikategorikan sebagai objek tidak dikenal. Dan citra tidak dikenal tersebut akan di plot ke dalam objek drawing untuk di bandingkan dengan template background lalu di hitung tingginya.
2.2 Pengolahan Citra
Citra digital adalah citra dua dimensi yang dapat ditampilkan pada layar monitor komputer sebagai himpunan berhingga (diskrit) nilai digital yang disebut pixel (picture elements). Pixel adalah elemen citra yang memiliki nilai yang menunjukkan intensitas warna. Berdasarkan cara penyimpanan atau pembentukannya, citra digital dapat dibagi menjadi dua jenis. Jenis pertama adalah citra digital yang dibentuk oleh kumpulan pixel dalam array dua dimensi. Citra jenis ini disebut citra bitmap atau citra raster. Jenis citra yang kedua adalah citra yang di bentuk oleh fungsi-fungsi geometri dan matematika .Jenis citra ini di sebut grafik vektor. Citra digital (diskrit) di hasilkan dari citra analog (kontinu) melalui digitalisasi. Digitalisasi citra analog terdiri atas penerokan (sampling) dan kuantisasi (quantization) Penerokan adalah pembagian citra ke dalam elemen-elemen diskrit (pixel), sedangkan kuantisasi adalah pemberian nilai intensitas warna pada setiap pixel dengan nilai yang berupa bilangan bulat.[G. Ariyanto, 2012].
Pengolahan citra merupakan teknik manipulasi citra secara digital yang khususnya menggunakan komputer, menjadi citra lain yang sesuai untuk digunakan dalam aplikasi tertentu. Agar mudah di interpretasi oleh manusia atau komputer, pengolahan citra harus di lakukan dengan berbagai macam metode untuk mencapai citra sesuai yang di inginkan. Operasi pengolahan citra digital umumnya dilakukan dengan tujuan memperbaiki kualitas suatu gambar sehingga dapat dengan mudah diinterpretasikan oleh mata manusia dan untuk mengolah informasi yang ada pada suatu gambar untuk kebutuhan identifikasi objek secara otomatis.[D.R. Andriessen, 2012].
2.1 Thresholding
Thresholding merupakan konversi citra berwarna ke citra biner yang dilakukan dengan cara mengelompokkan nilai derajat keabuan setiap pixel kedalam 2 kelas, hitam dan putih. Pada citra hitam putih terdapat 256 level, artinya mempunyai skala “0” sampai “255” atau [0,255], dalam hal ini nilai intensitas 0 menyatakan hitam, dan nilai intensitas 255 menyatakan putih, dan nilai antara 0 sampai 255 menyatakan warna keabuan yang terletak antara hitam dan putih. Contoh operasi titik berdasarkan intensitas adalah operasi pengambangan (thresholding). Pada operasi pengambangan, nilai intensitas pixel dipetakan ke salah satu dari dua nilai, α₁ atau α₂, berdasarkan nilai ambang (threshold) T dapat ditunjukkan seperti pada persamaan berikut:[G. Ariyanto,2009].
2.2 Color Filtering
Color Filtering adalah suatu teknik pengolahan citra yang yang dipakai untuk memanipulasi suatu citra berdasarkan warna spesifik. Cara kerjanya adalah dengan membandingkan komponen warna setiap pixel citra dengan warna spesifik. Apabila warnanya sesuai dengan warna spesifik komponen warna pixel tersebut dibiarkan saja. Namun, bila warnanya tidak sesuai dengan warna spesifik maka komponen warna pixel tersebut diubah menjadi warna background, biasanya menjadi warna hitam.
Warna yang digunakan dalam Color Filtering dapat di representasikan dalam berbagai ruang warna. Ada beberapa ruang warna yang dikenal, antara lain RGB (Red, Green, Blue), HSV (Hue, Saturation, Value), YCbCr, dsb. HSV merupakan ruang warna yang sangat cocok untuk mengidentifikasi warna-warna dasar, dimana warna-warna dasar ini digunakan dalam penelitian sebagai warna identifikasi robot. Selain itu, HSV menoleransi terhadap perubahan intensitas cahaya. Inilah yang menjadi keunggulan HSV dibandingkan dengan ruang warna lainnya.[5]
2.3 Metode Template Matching
Template matching adalah salah satu teknik dalam pengolahan citra digital yang berfungsi untuk mencocokan tiap-tiap bagian dari suatu citra dengan citra yang menjadi sampel (template). Teknik ini banyak digunakan dalam bidang industri sebagai bagian dari quality control. Pada prinsipnya metode template matching memiliki karakteristik antara lain: 1. Relatif mudah untuk diaplikasikan dalam teknik pengolahan citra digital.
2. Hasilnya relatif sangat akurat karena mendeteksi kesalahan hingga ukuran pixel.
3. Metode ini cukup rentan terhadap perbedaan orientasi antara citra sampel (template) dengan citra yang akan di identifikasi, yang meliputi: ukuran, posisi dan kualitas citra.
4. Untuk mendapatkan hasil yang maksimal maka metode ini sangat tergantung pada teknik pengolahan citra digital yang lain seperti enhacement, color filtering, dan lain-lain.
2.4 OpenCV
OpenCV (Open Computer Vision) adalah sebuah API (Application Programming Interface) library yang sudah sangat familiar pada pengolahan citra menggunakan Computer Vision. Computer Vision itu sendiri adalah salah satu cabang dari bidang ilmu pengolahan citra (Image Processing) yang memungkinkan komputer dapat melihat seperti manusia. Dengan vision tersebut komputer dapat mengambil keputusan, melakukan aksi, dan mengenali terhadap suatu objek. Beberapa pengimplementasian dari Computer Vision adalah Face Recognition, Face Detection, Face/Object Tracking, Road Tracking, dll. OpenCV adalah libraryOpen Source untuk Computer Vision untuk C/C++, OpenCV didesain untuk aplikasi real-time, memiliki fungsi-fungsi akuisisi yang baik untuk image/video. [4].
3. HASIL DAN PEMBAHASAN
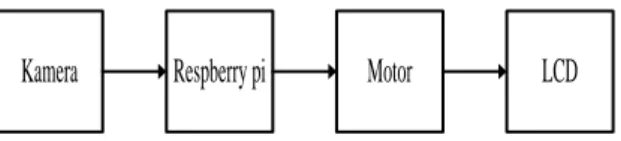
Untuk mempermudah dalam pembuatan alat tentunya perlu perancangan yang jelas karena sangat berguna untuk mempelancar proses pembuatan. Oleh karena itu, pengerjaan proyek ahir ini di kelompokkan ke dalam tiga blok yaitu kamera, raspberrry pi, dan LCD.
Kamera
Respberry pi
Motor
LCD
Gambar 3.1 Blok diagram alat
Kamera di jadikan sebagai penangkap objek yang kemudian akan di olah dengan teknik template matching.
Gambar 3.2 Posisi kamera terhadap objek Gambar 3.2 menunjukan posisi kamera terhadap objek. Posisi kamera menyamping terhadap objek ukur dan kamera tidak bisa di ubah letaknya, namun di atur supaya bisa mengikuti objek dengan tambahan motor untuk pengatur gerak kamera.
3.1 Perancangan Perhitungan Tinggi Objek
Template matching adalah salah satu teknik dalam pengolahan citra digital yang berfungsi untuk mencocokan tiap-tiap bagian dari suatu citra dengan citra yang menjadi sampel (template).Pada saat alat di aktifkan maka kamera akan menangkap frame yang akan di jadikan sebagai background atau template.
Template tersebut adalah dalam bentuk pixel yang akan di ubah tingginya ke dalam sentimeter. Lalu untuk mendeteksi objek melihat perubahan pixel dari template kamera yang di tandai dengan fokus X seperti gambar 3.3.
Gambar 3.3 Daerah drawing kamera untuk perhitungan tinggi
Frame kamera Frame objek
Perhitungan tinggi objek (X) adalah menggunakan rumus : ( ) ( ) ( ) ( ) Sehingga : ( ) ( ) ( ) ( )
3.2 Perancangan Perhitungan Berat Objek
Masih dengan menggunakan template yang sama di hitung lebar dari objek yang akan di asumsikan dan di konversi ke berat dalam satuan ons (ons). Untuk perhitungan lebar objek masih menggunakan teknik kesebangunan namun yang di hitung nilai pixel pada citra dan akan di konversi ke berat dalam satuan ons (ons) untuk lebih jelasnya perhatikan gambar 3.4 berikut:
Gambar 3.3 Daerah drawing kamera untuk perhitungan berat
Frame kamera Frame objek
Perhitungan tinggi lebar (B) adalah menggunakan rumus :
180 0
Tidak ( ) ( ) ( ) ( ) Sehingga : ( ) ( ) ( ) ( )
3.3 Perencanaan Cara Kerja Alat
Pada proyek ahir ini ada dua tahapan yang di lakukan dalam menjalankan alat. Yang pertama adalah menentukan background atau daerah tangkapan kamera. Saat kamera di aktifkan maka kamera akan menangkap area yang akan di jadikan background sesuai perencanaan awal. Lalu lakukan proses background subtraction yang bertujuan untuk memproses tangkapan kamera dan dijadikan background. Untuk lebih jelasnya proses pembuatan background dapat di lihat pada gambar 3.5 berikut.
Start Capture background Background subtraction Simpan sebagai template End
Gambar 3.5 Flowchart background
Setelah background di dapatkan maka akan di lanjutkan pada proses background subtraction. Dan background tersebut akan di simpan sebagai template yang akan menjadi sebuah acuan untuk proses selanjutnya baik perhitungan tinggi maupun lebar dari objek. Pada gambar 3.6a menunjukan flowchat perhitungan objek oleh mikro. Saat background berubah maka itu akan di deteksi sebagai objek, sehingga saat objek terdeteksi maka akan di lakukan lagi proses background subtraction untuk mejadikan perubahan itu sebagai objek drawing dan akan di bandingkan dengan background sebelumnya dan di hitung besar pixel perubahannya. Perubahan tersebut akan di lihat seberapa besar nilainya jika kurang dari 1% maka itu akan di asumsikan sebagai background dan kamera akan kembali menangkap objek. Namun jika perubahannya lebih besar dari 1% maka motor
aktif dan kamera mengikuti intensitas warna yang berubah tersebut dan akan di asumsikan sebagai objek sehingga objek akan di hitung tingginya dengan persamaan (3.2) : ( ) ( ) ( ) ( ) Start Capture Background Template Objek= Background- Template Objek > 1 % Hitung Tinggi Objek Hitung lebar objek B A YA Motor Aktif
Gambar 3.6a Flowchart perhitungan objek
Setelah nilai tinggi di dapatkan maka akan dilakukan perhitungan lebar objek yang nantinya akan di konversi ke berat objek tersebut dengan menggunakan persamaan (3.4):
( ) ( ) ( )
( )
3.4 Pengujian
Pada pengambilan data objek ini peneliti mengambil referensi 4 orang berbeda dan didapatkan cuplikan hasil sebagai berikut :
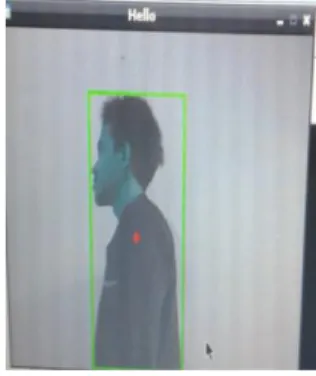
Gambar 4.6 Pengukuran tinggi rizki
Pada gambar 4.6 Pengukuran tinggi rizki di atas di lakukan berulang-ulang sehingga didapat hasil yang berbeda dan ini di jadikan referensi untuk melihat keakuratan alat dalam menentukan hasil pengukuran.
Hasil pengukuran akan muncul pada saat objek berada di tengah atau segaris lurus terhadap kamera seperti gambar 4.6 di atas, dan hasil akan di tampikan pada LCD seperti gambar 4.7 berikut.
Gambar 4.7 Tampilan hasil pengukuran pada LCD Gambar 4.7 Tampilan Hasil pada LCD merupakan hasil print yang di berikan dalam program. Pada gambar di atas dapat dilihat bahwa tinggi objek yang di ukur adalah 169 cm dengan berat 60. Dalam hal ini pengukuran berat sama seperti pengukuran benda hasil yang di dapatkan adalah lebar dari objek yang di ukur atau bisa di katakan itu bukan berat yang sebenarnya. Namun jika di aplikasikan ke wahana roler coster bisa di tambahkan dengan perumpamaan berat ideal seperti jika 20 < berat objek > 60 dan di print dalam bentuk ideal. Hal ini di maksutkan karena lebar bangku pada wahana tersebut kurang dari 60 cm dan jika lebih dari itu maka bangku tidak muat pada bangku wahana. Selain pada LCD objek juga akan terukur pada tampilan monitor raspberry seperti gambar 4.8 berikut.
Gambar 4.8 Tampilan hasil pengukuran pada monitor rasberry
Selain pada LCD peneliti juga menampilkan hasil pada monitor raspberry sebagai mana yang terlihat pada gambar 4.8 Tampilan Hasil Pengukuran pada Monitor Raspberry. Pada gambar 4.8 ini hasil dibuat dalam bentuk satu angka di belakang koma untuk melihat perbedaan yang tampil pada LCD. Pada beberapa data didapat hasil yang berbeda karena pada LCD hanya mengambil bilangan bulat. Hal ini di karenakan tidak memungkinkannya nilai tinggi dengan nilai berkoma. Sedangkan pada monitor merupakan hasil pengukuran perhitungan pixel sehingga memungkinkannya ada nilai berkoma. Untuk melihat hasil pengukuran secara keseluruhan dapat di lihat pada tabel berikut
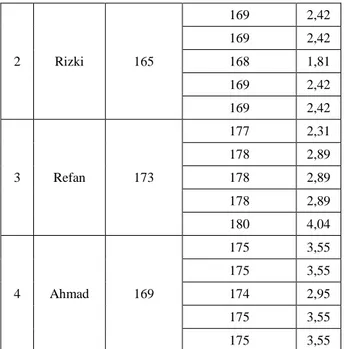
Tabel 4.3 Tabel pengukuran tinggi manusia
No Nama Tinggi sebenarnya (cm) Tinggi pengukuran (cm) Error % 1 Ridho 170 177 4,11 178 4,70 177 4,11 175 2,94 177 4,11 2 Rizki 165 169 2,42 169 2,42 168 1,81 169 2,42 169 2,42 3 Refan 173 177 2,31 178 2,89 178 2,89 178 2,89 180 4,04 4 Ahmad 169 175 3,55 175 3,55 174 2,95 175 3,55 175 3,55
Berdasarkan data yang di dapat dari tabel 4.3 Pengukuran tinggi manusia ada beberapa hal yang bisa kita lihat dan bandingkan dengan tabel 4.1 Pengukuran tinggi benda. Pada pengukuran manusia ini dilakukan berulang-ulang sehingga peneliti mendapatkan hasil yang di inginkan di karenakan ruang yang digunakan untuk mengukur pixel yang besar juga harus besar. Dan mempunyai kerataan cahaya yang cukup sehingga hasil dari pengukuran akurat dan nilai error mendekati nilai nol. Nilai error yang didapatkan begitu kecil karena pengukuran dilakukan pada saat cahaya yang merata yaitu sekitar 12.00 wib sampai 17.00 wib. Jarak kamera terhadap objek juga mempengaruhi nilai pengukuran artinya jika dalam program telah di setting nilai tertentu maka nilai tersebut harus sesuai dengan waktu pengambilan data begitu juga untuk nilai pixelnya.
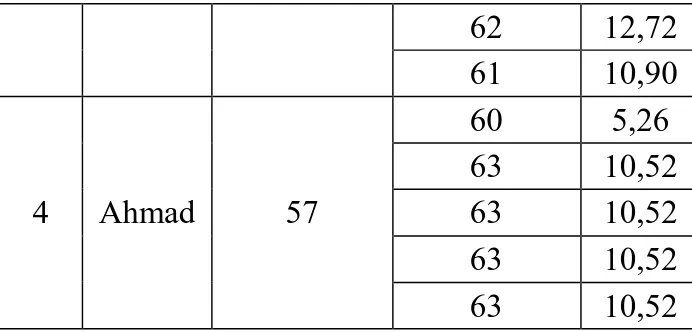
Tabel 4.4 Pengukuran berat objek
No
Nama
Berat
sebenarnya
(Kg)
Berat
pengukuran
(Kg)
Error
%
1
Ridho
55
61
10,90
62
12,72
61
10,90
61
10,90
61
10,90
2
Rizki
48
60
25
61
27,08
62
29,16
61
27,08
61
27,08
3
Refan
55
60
9,09
60
9,09
60
9,09
62
12,72
61
10,90
4
Ahmad
57
60
5,26
63
10,52
63
10,52
63
10,52
63
10,52
Tabel 4.4 di atas merupahan hasil pengukuran berat namun jika melihat hasil yang di dapatkan nilai error begitu tinggi hasil pengukuran antara data ridho dan ahmad yang mempunyai perbedaan berat yang begitu kecil namun pada pengukuran sebenarnya perbedaan besar. Dan setelah dilihat dan di analisa yang terukur adalah nilai lebar dari objek. Hal ini juga dapat kita lihat pada data ridho dan refan berat yang sebenarnya sama namun karena lebar berbeda di dapat pengukuran yang berbeda pula. Namun nilai error ini jika di aplikasikan ke wahana roler coster dengan ketentuan 20 < berat objek > 60 akan bekerja dengan baik, karena yang di ukur adalah lebar dan kita sesuaikan dengan lebar kursi pada wahana roler coster, artinya jika lebar seseorang terukur kurang dari 60 dan lebih dari 20 cm maka orang tersebut ideal untuk masuk wahana roler coster tersebut.
3.4.1 Melihat aspek pengukuran
Berdasarkan data yang di peroleh setelah pegukuran maka ada beberapahal yang dapat kita analisa berdasarkan aspek pengukuran di antaranya adalah :
1. Akurasi
Akurasi adalah derajat kedekatan pengukuran terhadap nilai sebenarnya. Akurasi mencakup tidak hanya kesalahan acak, tetapi juga bisa yang disebabkan oleh kesalahan sistematik yang tidak terkoreksi. Jika tidak ada bias kesalahan sistematik maka standar deviasi dapat dipakai untuk menyatakan akurasi. Pada data pengukuran benda dapat di lihat derjat kedekatan alat atau yang menunjukkan nilai akurasi yang tinggi yaitu pada korek api. Sedangkan pada objek manusia terjadi pada saat pengukuran refan hal ini di sebabkan kesemerataan cahaya yang merata pada background dan juga intensitas cahaya yang cocok pada alat ukur sehingga terjadi akurasi yang tinggi. Namun ini tidak berarti pada saat pengukuran yang lain alat tidak mampu menunjukan ke presisian tetapi pada saat pengukuran korek api dan refan lah presisi paling tinggi terjadi dari sekian kali pengukuran. Akurasi pada korek api terjadi karena nilai nol dibelakang koma tidak didapatkan. Sebagaimana yang diketahui bahwa angka dibelakang koma mempengaruhi nilai akurasi suatu alat ukur.
2. Presisi
Presisi juga berkaitan dengan seberapa besar penyimpangan hasil ukur suatu besaran ketika pengukuran dilakukan secara berulang-ulang. Jika dilihat pada data yang peneliti dapatkan maka nilai
presisi saat pengukuran benda terjadi saat mengukur panjang besi bahkan saat pengukuran besi tidak terjadi penyimpangan pengukuran walaupun kurang presisi karena setiap alat ukur yang presisi belum bisa dikatakan akurat. Dan jika melihat kepada data tinggi manusia makan kepresisian alat ukur saat mengukur rizki dengan nilai 169 cm dan ahmad terjadi pada nilai 175 cm. sebagai mana dikatakan tadi belum tentu setiap alat yang presisi itu akurat hal ini dapat kita lihat bahwa tidak samanya benda maupun tubuh manusia terukur presisi ataupun akurasi, hal ini bisa saja di akibatkan posisi kamera yang berubah ubah karena gerak motor servo ataupun kesalahan pada saat peletakan teknis kamera terhadap background.
3.Angka penting
Angka-angka yang berarti atau biasa kita kenal dengan angka penting. Angka penting adalah bilangan yang diperoleh dari hasil pengukuran yang terdiri dari angka-angka penting yang sudah pasti (terbaca pada alat ukur) dan satu angka terakhir yang ditafsir atau diragukan. Dan ini juga mempengaruhi nilai pengukuran seperti halnya saat pengambilan data benda tutup pena yang terukur pda monitor raspberry 4,3 cm sedangkan yang di print pada LCD 4 cm atau 4,1 cm dan metode pengambilan angka penting ini juga perlu karena bisa mempengaruhi nilai pengukuran. Dan angka penting inilah yang menyebabkan tadi nilai akurasian dari korek api tinggi karena 8 cm tidak mempunyai angka penting di belakang koma, atau nol disini di anggap angka tidak penting.
4.Kesalahan-kesalahan sistematis (systematic errors) Ketidakpastian bersistem dapat disebut sebagai sumber kesalahan karena bersumber pada kesalahan alat. Ketidakpastian ini meliputi hal-hal seperti kesalahan saat kalibrasi. Kesalahan kalibrasi terjadi karena skala nilai pada alat ukur saat kalibrasi tidak segaris lurus. Kesalahan ini dapat diketahui dengan cara membandingkan saat proses kalibrasi dengan alat lain yang standar seperti metran siku. kesalahan titik nol juga mempengaruhi nilai ukur seperti halnya yang peneliti lakukan titik nol pada kamera dan pengukuran manual itu berbeda. Jika pada saat manual dilakukan pengukuran pada bagian paling bawah sampai paling atas dari objek ukur, lain halnya pada saat menggunakan kamera bisa saja titik nol yang terukur pada kamera telah 1cm perbedaanya dari nilai nol sebenarnya dan ini juga mempengaruhi nilai pengukuran.
3.4.2 Analisis kecepatan kamera dan waktu tangkap objek
Objek tertangkap saat kamera berada tegak lurus dengan objek ukur dan waktu yang di butuhkan tergantung dari kecepatan objek yang lewat di depan kamera. Berdasarkan percobaan yang telah peneliti lakukan dengan melewatkan bola di depan kamera dengan kecepatan yang berbeda untuk jarak kamera yang berbeda pula maka peneliti mendapatkan data sebagai berikut:
No
Kecepatan
Objek
(cm/s)
Jarak
kamera
(cm)
Keterangan
Nilai error
1
0,5
20
<5%
100
<5%
300
<5%
2
1
20
<8%
100
<10%
300
<10%
3
2
20
<10%
100
>10%
300
-
4
5
20
>20%
100
-
300
-
Berdasarkan data pada tabel 4.5 maka dapat di lihat pengaruh kecepatan objek di depan kamera dan pengaruhnya terhadap nilai pengukuran tinggi objek. Secara umum waktu yang dibutuhan untuk mendapatkan hasil pada LCD adalah tergantung kecepatan objek di depan kamera namun berdasarkan pengukuran ideal kecepatannya adalah 1cm/detik. Berdasarkan tabel data 4.5 pada jarak kamera 20 cm, 100cm, 300 cm, terhadap objek nilai yang di dapatkan cukup bagus dengan ke akuratan < 5%. Namun saat kecepatan objek di naikan pengukuran pun akan menurun akurasinya dapat kita lihat saat kecepatan objek 2 cm/detik, untuk jarak 20cm saja error telah mencapai 10% dan lebih dari 10% untuk jarak kamera 100cm terhadap objek, bahkan pada jarak 300cm kamera telah tidak mampu untuk mengikuti pergerakan objek. Hal ini dikarenakan resolusi kamera yang kurang baik juga kemampuan mikro untuk mengolah citra yang masih kurang bagus.
4. PENUTUP
Kesimpulan
1. Tingkat error akan semakin berkurang jika pencahayaan pada saat pengukuran merata sehingga sistem mampu mendeteksi objek ukur (manusia) dengan baik. Error yang didapatkan bisa mendekati 0%.
2. Posisi Camera sangat mempengaruhi hasil dari penelitian ini, dimana posisi Camera lebih bagus di bagian yang mendapat pencahayaan yang lebih bagus.
3. Hasil tinggi yang didapatkan semakin akurat apabila warna background dan objek kontras minimal 30 %.
4. Metode template maching dan perhitungan kesebangunan ini cocok untuk pengukuran tinggi objek dengan akurasi 5 %.
Saran
1. Untuk pengukuran berat bisa di cobakan dengan metode lain seperti deteksi tepi.
2. Menggunakan Camera yang resolusinya lebih tinggi.
DAFTAR REFERENSI
Zulkhairi, (2012). Perancangan dan Implementasi Pengukuran Jarak dan Objek Berbasis Kamera pada Perangkat Mobile. Pekanbaru : Politeknik Caltex Riau.
Raspberry Pi Foundation, (2012). The Raspberry Pi Education Manual. New york : etnasoft. Raspberry Pi & Wiki, (2012). Quick Start Guide
Source : The Raspberry Pi-Single Board Computer. New york: etnasoft.
K. Irianto and G. Ariyanto, (2009). Motion Detection Using OpenCV with Background Subtraction and Frame Differencing Technique. pp. 74– 81.
Andriessen Daniel Richard, (2012). Pengendalian Mobile Robot Berbasis Webcam Menggunakan Perintah Isyarat Tangan. turky: Deakin University.
Emanuel Setio dewo, (2012). Menyalakan Raspberry Pi. pp.67.
Start Guide, (2012). Raspberry Pi Quick Start Guide. New york : raspberrymanual.
William David, (1999). Instrumentasi elektronik dan teknik pengukuran. Jakarta: Erlangga.