i
OTOMATISASI SISTEM PAKAN HAMSTER
BERBASIS MIKROKONTROLER
disusun oleh :
JANSEN SIMATUPANG
NIM : 055114034
PROGRAM STUDI TEKNIK ELEKTRO
JURUSAN TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
ii
AUTOMATION FEED SYSTEM FOR HAMSTER
USING MICROCONTROLLER
JANSEN SIMATUPANG
NIM : 055114034
ELECTRICAL ENGINEERING STUDY PROGRAM
ELECTRICAL ENGINEERING DEPARTMENT
SCIENCE AND TECHNOLOGY FACULTY
SANATA DHARMA UNIVERSITY
vii
Minat masyarakat akan pemeliharaan binatang marak terlihat pada akhir-akhir ini. Keadaan ini terjadi dikarenakan adanya kesibukan-kesibukan yang sering dijumpai pada era globalisasi yang menuntut agar tiap manusia dapat berkerja keras dalam memenuhi kebutuhan sehari – hari, sehingga akibat kesibukan ini banyak orang mengalihkan kepenatan dengan cara memelihara binatang tidak terkecuali dengan hamster. Ketidak teraturan pemelihara dalam memberi pangan dapat menyebabkan kelaparan maupun kegemukan pada hamster. Tujuan dari perancangan ini yaitu membuat suatu alat yang dapat memberi pangan dan mendaur ulang makanan secara otomatis.
Sensor dirancang untuk mendeteksi pakan dan akan memberi masukan pada mikrokontroler untuk mengijinkan pakan diberi atau pakan yang terdapat di dalam kandang untuk didaur ulang. Motor pembuangan berfungsi untuk membuang pakan sehingga dapat ditampung dalam wadah daur ulang dan dapat diangkat sehingga bisa ditampung pada wadah penampung. Aktuator untuk menggerakkan katup pembuangan, katup pakan, dan wadah daur ulang menggunakan motor DC.
Hasil pengamatan menunjukan bahwa alat bekerja cukup baik akan tetapi terdapat ketidak akuratan dalam pendaur-ulangan pakan yang disebabkan oleh mekaniknya. Timer yang berjalan tidak sesuai dengan dunia nyatanya sehingga pewaktuan dalam pemberia pakan menjadi tidak teratur.
viii
On this day, many people become interested to pet an animal. Its because daily activitcy on this era that force people to work to be able to live, therefore many people choose to buy or rise a pet including hamster. The undisciplined to fed cause the pet become hungry or over weight. The main idea for this plant is to make a tool that can fed the hamster and recycle the food automatically.
Sensor designed to detect the food and will give an input to microcontroller to decide whether the food will be given or will be recycled. The fuction of throwing motor are to throw the food to recycle box so that the food can be lifted to saving box. Aktuator used to move the throwing door, feding door, and recycle box using motorDC.
Observation result show that the tool work well enough but there is unacurate on recycling the food which caused by mechanic. Timer on the tool is not real time so the feding time in not right.
ix
Puji dan syukur kepada Tuhan Yesus Kristus atas karunia dan bimbingan-Nya sehingga
Penulis dapat menyelesaikan perancangan Tugas Akhir “ Otomatisasi Sistem Pakan Hamster
Berbasis Mikrokontroler” beserta penulisan laporan ini.
Tugas Akhir ini dibuat sebagai salah satu syarat untuk meraih gelar Sarjana Strata 1 (S1)
pada jurusan Teknik Elektro Fakultas Sains dan Teknologi Universitas Sanata Dharma
Yogyakarta.
Berkat dukungan dari banyak pihak, Penulis dapat menyelesaikan Tugas Akhir ini
dengan baik. Dan dengan tulus hati, Penulis menyampaikan terima kasih yang sebesar –
besarnya kepada pihak yang telah membantu demi lancarnya penyelesaian Tugas Akhir ini :
1. Ibu B. Wuri Harini S.T., M.T. selaku Pembimbing I yang telah memberikan bimbingan
dan arahan kepada Penulis dari awal hingga Tugas Akhir ini selesai.
2. Keluarga, yang telah memberikan dukungan moral dan ekonomi sehingga Tugas Akhir
ini dapat selesai.
3. Bapak Damar Widjaja, S.T., M.T., selaku Pembimbing Akademik yang telah membantu
dan memberi arahan dari awal hingga akhir masa kuliah.
4. Johfines Wijaya, yang telah membantu, dan mendukung hingga terselesaikannya Tugas
Akhir ini.
5. Rekan – rekan Teknik Elektro Angkatan 2005, terimakasih atas kebersamaan, dukungan,
dan bantuannya sehingga masa kuliah menjadi kenangan yang indah dan menyenangkan.
6. Rekan – rekan satu kontrakan, Charli Liando Saputra, Silverius Yonan Saga, Oktavianus
Ardhian Nugroho, I Putu gede Surya Wibawa, Efendi Saipin, Herman Marhindi, Adi
x
Dharma dan semua pihak yang selama ini secara tidak langsung telah banyak membantu
Penulis.
Penulis menyadari sepenuhnya akan keterbatasan, kekurangan, dan kelemahan yang
menjadikan Tugas Akhir ini masih jauh dari kesempurnaan. Penulis mengharapkan adanya kritik
dan saran dari para Pembaca, dan dengan senang hati Penulis akan menerimanya.
Kiranya demikianlah beberapa hal yang ingin Penulis sampaikan, dengan harapan
semoga bermanfaat bagi Pembaca semuanya.
Yogyakarta, 14 Desember 2010
xi
Halaman Sampul (Bahasa Indonesia)……… i
Halaman Sampul (Bahasa Inggris) ………... ii
Halaman Persetujuan………. iii
Halaman Pengesahan…….……… iv
Lembar Persetujuan Publikasi Karya Ilmiah ... v
Pernyataan Keaslian Karya……… vi
Intisari……… vii
Abstract……….. viii
Kata Pengantar………...ix
Daftar Isi……… xi
Daftar Gambar ……….. xiv
Daftar Tabel………... xvi
BAB I : PENDAHULUAN 1.1 Judul ………1
1.2 Latar Belakang ……… 1
1.3 Tujuan dan Manfaat ……… 2
1.4 Batasan Masalah ………. 2
1.5 Metodologi Penelitian ……….3
BAB II : DASAR TEORI 2.1 Hamster ……….. 4
2.2 Mikrokontroler ATMega8535………... 5
xii
2.4Light Emitting Diode(LED) ………... 7
2.4.1 Tegangan dan Arus LED……….…..7
2.5 Optocoupler ……….8
2.6 Saklar Batas (Limit Switch) ……….9
2.7Push Button Switch………..10
2.8 Aktuator Menggunakan Motor DC …..………...11
2.9 Prinsip KerjaSolenoid……….12
2.10 LCD (Liquid Crystal Display)………..……..13
2.10.1 Gambaran Umum ...13
2.10.2 Register ...14
2.10.2.1 Register Perintah ...15
2.10.2.2 Register Data ...17
2.11 ICDriverL293D ...18
BAB III : RANCANGAN PENELITIAN 3.1 Pra Penelitian...………..….20
3.2 Model Sistem………...20
3.3 Alur Perancangan Sensor .………..…….…22
3.3.1 Sensor Makan……….……….….22
3.4 Perancangan Motor DC Sebagai Aktuator………..24
3.5 Alur Perancangan Sistem Daur Ulang Pakan...25
3.5.1 Sistem Pembuangan Pakan...25
3.5.2 Sistem Pengangkatan Pakan...26
xiii
3.7.1 Diagram Alir Program Utama ………..28
3.7.2 Diagram Alir Program LCD…………..………30
BAB IV : HASIL DAN PEMBAHASAN 4.1 PengujianHardware……….34
4.1.1 Pengujian controlrelay………..35
4.1.2 Pengujian Motor Makan………. ………...36
4.1.3 Pengujian Motor Pembuangan Pakan………38
4.1.4 Pengujian Motor Daur Ulang………39
4.1.5 Pengujian Sensor………...42
4.2 PembahasanSoftware...43
4.2.1 Pembahasan Timer ...44
4.2.1 Pembahasan Subrutin Persimpangan...46
4.2.1 Pembahasan Otomatisasi Pakan...46
BAB V : KESIMPULAN DAN SARAN 5.1 Kesimpulan ...48
5.2 Saran ...48
xiv
Halaman
Gambar 2.1. KonfigurasipinATMega8535………... 6
Gambar 2.2 Simbol Rangkaian Fotodioda ……….. 7
Gambar 2.3 Simbol LED ………..……… 7
Gambar 2.4 Rangkaian LED ……….………... 8
Gambar 2.5 Rangkaian Optocoupler ………... 9
Gambar 2.6 KondisiLimit SwitchNO dan KondisiLimit SwitchNC..……… 10
Gambar 2.7Push Buttun…...……… 10
Gambar 2.8 Kontrol Motor DC Menggunakan Jembatan H ……… 11
Gambar 2.9Pulse-Width Modulation…..………. 12
Gambar 2.10 Prinsip kerjasolenoid………..13
Gambar 2.11 Konstruksi LCD …..……… 13
Gambar 2.12 LCD 4 x 1 …….………. ……… 14
Gambar 2.13 Diagram Pewaktuan Penulisan Data ke Register Perintah Mode 4-bit 13... 15
Gambar 2.14 Diagram Pewaktuan Pembacaan Data ke Register Perintah Mode 4-bit ….... 16
Gambar 2.14 Diagram Pewaktuan Penulisan Data ke Register Data Mode 4-bit... 17
Gambar 2.15 Diagram Pewaktuan Pembacaan Data dari Register Data Mode... 18
Gambar 2.16 IC L293D ... 19
Gambar 3.1 Blok Diagram Sistem Secara Umum ……… 20
Gambar 3.2. Desain jadi sistem pakan otomatis hamster ... 21
Gambar 3.3 Diagram Sistem Sensor Secara Umum……….…. 22
xv
Gambar 3.6 Rangkaian Skematik Untuk Pembuka Pintu Makan dan Pintu Daur Ulang... 24
Gambar 3.7 Rangkaian Skematik Untuk Pembuka Pintu Pembuangan Makanan dan Kipas Daur Ulang... ... 25
Gambar 3.8 Gambar Sistem Pembuangan Makanan... 26
Gambar 3.9 Interface LCD Mode 4 Bit ... 28
Gambar 3.10 Diagram Alir Perangkat Lunak Otomatisasi Sistem Pakan Hamster...30
Gambar 3.11 Diagram Alir Perangkat Lunak Display LCD Pemberian Pakan ...31
Gambar 4.1 Desain Jadi Sistem Pakan Otomatis Hamster yang Telah Diubah...33
Gambar 4.2 Gambar alat ………..………. 34
Gambar 4.3RelayPutaran Motor Pakan dan Daur Ulang... 35
Gambar 4.4 RangkaianRelayPembuangan Pakan... 36
Gambar 4.3 Gambar buka tutup pintu pakan ... 37
Gambar 4.4 Pembuangan pakan ……..………. 39
Gambar 4.5 Gambar pengangkatan pakan ... 39
Gambar 4.6 Makanan dituangkan ... 40
Gambar 4.7 Sudut Kemiringan (α) ……….……….. 41
Gambar 4.8HardwareRangkaian Sensor Makanan ... 42
Gambar 4.7 Diagram Alir Perangkat Lunak Otomatisasi Sistem Pakan Hamster Terbaru... 44
xvi
Halaman
Tabel 2.1 Konfigurasi Pin LCD………..………... 14
Tabel 2.2 Perintah-perintah LCD Jenis HD44780...16
Tabel 3.1 Karakteristik Fotodioda Hasil Pra Penelitian………...24
Tabel 4.1 Banyaknya pakan yang diberi...37
Table 4.2 Keberhasilan pembuangan pakan...38
Tabel 4.3 Data Hasil Pengujian Kinerja Mtor Daur Ulang...……….40
Table 4.4 Keberhasilan Daur Ulang………...41
Tabel 4.5 Data Perbandingan Hasil Pengukuran dengan Hasil perancangan Sensor Makanan………...42
BAB I
PENDAHULUAN
1.1.Judul
Otomatisasi sistem pangan hamster berbasis mikrokontroler ATMega8535.
1.2.Latar Belakang
Minat masyarakat akan pemeliharaan binatang marak terlihat pada akhir-akhir ini.
Keadaan ini terjadi dikarenakan adanya kesibukan-kesibukan yang sering dijumpai pada era
globalisasi yang menuntut agar tiap manusia dapat berkerja keras dalam memenuhi kebutuhan
sehari - hari, sehingga akibat kesibukan ini banyak orang mengalihkan kepenatan dengan cara
memelihara binatang tidak terkecuali dengan hamster. Akan tetapi dengan kesibukan yang
memakan dan menyita banyak waktu ini terkadang manusia mengabaikan kerutinan dalam
pemberian pangan yang baik dan juga pemeliharaan kandang yang cukup teratur. Hal ini dapat
menyebabkan kerugian bagi pemelihara dan juga binatang peliharaan tersebut. Misalnya
dengan penyakit yang bisa ditimbulkan binatang tersebut terhadap manusia. Oleh karena itu,
dengan alat yang bisa memberi dan mengatur pangan secara otomatis, pemelihara tidak
dituntut untuk tekun memelihara binatang tersebut.
Banyak kasus kematian binatang peliharaan disebabkan oleh sang pemelihara. Sang
pemelihara disibukkan oleh urusan – urusan yang lain. Hal itu menyebabkan kurang
terpeliharanya binatang tersebut. Kurang terjaganya suhu dan kurang makan sering dilupakan
oleh sang pemelihara.
Untuk memelihara hamster secara benar dalam artian sesuai dengan habitatnya
tidaklah gampang dikarenakan banyaknya faktor yang mempengaruhi pemeliharaan tersebut.
Untuk itu perlu diteliti habitat dan pola hidupya, agar alat yang akan dirancang lebih tepat
guna.
Ketidak teraturan pemelihara dalam memberi pangan dapat menyebabkan kelaparan
maupun kegemukan pada hamster. Kondisi kelaparan sangat tidak baik, karena hamster
merupakan binatang kanibal jika dirinya merasa terganggu dari dalam maupun dari luar.
Kegemukan atau nama lainnya obesitas akan mengakibatkan hamster tampak tidak menarik
dan lebih cepat terserang penyakit. Makanan kadaluarsa dapat menjamur dan basah sehingga
menjadi makanan yang tidak layak untuk dimakan, Jika hamster memakan makanan tersebut
dapat menimbulkan berbagai penyakit.
Alat yang telah ada masih jauh dari harapan yang diinginkan oleh masyarakat. Yang
diinginkan oleh masyarakat adalah alat yang lebih praktis dan bekerja secara otomoatis. Alat
yang telah ada masih sebatas tempat tinggal. Pengurusan pangan masih dilakukan secara
manual.
1
.3.Tujuan dan Manfaat
Tujuan dari penelitian ini yaitu membuat suatu alat yang dapat memberi pangan dan
mendaur ulang makanan secara otomatis.
Selama penelitian dalam merancang sistem pangan otomatis ini, diharapkan dapat diambil
manfaatnya antara lain :
a. Keteraturan pemelihara dalam memberi makan
b. Sebagai acuan untuk dapat lebih memahami fungsi dan karakteristik komponen
-kompenen elektronik maupun mekanik yang digunakan dalam perancangan sehingga
memperdalam ilmu pengetahuan.
1.4.Batasan Masalah
Agar perancangan sistem dan pembahasan laporan tentang sistem pangan otomatis
berbasis mikrokontroller ini menjadi lebih spesifik maka diberikan beberapa batasan sebagai
berikut:
a. Motor pembuka pintu adalah motor DC
b. Sensor cahaya menggunakan LED inframerah, fotodioda, dan LDR (Light Dependent
Resistor) yang kepekaan resistornya dapat diatur melalui resistor variabel (potensiometer). c. Digunakan rangkaian mikrokontroler ATMega 8535 untuk mengendalikan semua proses
yang berlangsung pada sistem pangan otomatis ini.
d. Display menggunakan LCD 4x16 untuk menampilkan waktu pemberian pakan, pengaturan
banyaknya pakan yang diinginkan, dan sebagai indicator makanan (masih ada makanan
ataukah sudah habis).
e. Terdapat tiga buah masukan yang digunakan sebagai pilihan banyaknya makanan yang
L untuk sedikit yang digunakan untuk satu ekor hamster dengan banyaknya makanan sekitar 5gram
M untuk sedang yang digunakan untuk dua ekor hamster dengan banyaknya makanan
sekitar 10gram
H untuk banyak yang digunakan untuk tiga ekor hamster dengan banyaknya makanan
sekitar 15gram
f. Luas kandang 35cmx40cmx20cm yang dapat digunakan untuk maksimal tiga ekor
hamster.
g. Makanan yang diberikan khusus makanan kering yang berukuran kecil, seperti pelet dan
kuaci.
1.5.Metodologi Penelitian
Penulisan skripsi ini menggunakan metode :
1. Studi pustaka, menggunakan buku – buku referensi dan jurnal – jurnal.
2. Perhitungan dan analisa dalam menentukan tegangan referensi untuk kepekaan sensor
optocoupler(pendeteksi makanan).
3. Perancangan alat yang didasari oleh dasar teori.
4. Implementasi hasil perancangan ke bentuk perangkat keras (hardware).
5. Pengujian alat dan mengambil data hasil pengujian dengan menggunakan alat ukur. Hal –
hal yang akan dikur atau diuji adalah:
Keberhasilan mekanisme pemberian pakan
Daya tahan alat
Ketepatan waktu pemberian pakan
Keberhasilan pengangkatan pakan dalam sistem daur ulang
Keberhasilan pembuangan pakan
6. Analisis data yang didapat dari pengujian alat.
BAB II
DASAR TEORI
2.1. Hamster
Hamster adalah binatang sejenis hewan pengerat, terdapat berbagai jenis di dunia dan
hampir ada di tiap negara. Hamster termasuk ke dalam subfamili cricetinae. Subfamili ini
terbagi ke dalam sekitar 18 spesies, yang diklasifikasikan ke dalam enam atau tujuh genus.
Hamster seringkali digunakan sebagai hewan percobaan di laboratorium (karena reproduksi
mereka yang cepat) bersama tikus dan hewan pengerat lainnya. [10]
Hamster biasanya bersifat diam dan nokturnal walaupun juga dapat dikatakan
krepuskular dan mereka terkadang aktif pada awal pagi hari atau akhir sore. Mereka adalah
penggali yang baik, membuat lubang dengan pintu masuk satu atau lebih dan dengan galeri
yang terhubung dengan kamar mereka untuk sarang, gudang makanan dan aktivitas lainnya.
Tidak ada hamster yang berhibernasi selama musim dingin, tetapi beberapa pengalaman
periode torpor terjadi selama beberapa hari sampai beberapa bulan. [10]
Hamster adalah makhluk omnivora. Makanan mereka biasanya butir padi, tetapi juga
termasuk buah segar, akar, bagian hijau tumbuhan, invertebrata dan beberapa binatang kecil
lainnya (serangga seperti belalang). Hamster membawa makanan mereka di pipi mereka yang
terdapat kantung untuk dimasukan kedalam lubang makanan mereka. Namun, tidak semua
makanan cocok untuk hamster, beberapa makanan, seperti daun beracun dari tomat, menjadi
makanan yang paling berbahaya untuk kesehatan hamster. Pendapat orang tentang makanan
tidak aman lainnya seperti memberi makan timun menyebabkan ekor mereka basah dan buah
sitrus beracun dan pada kedua pendapat ini terdapat hal yang salah. Timun memiliki sangat
sedikit nutrisi yang baik dan dapat menyebabkan masalah pada hati, dan beberapa hamster
tidak menyukai rasa dari buah sitrus, tetapi sitrus aman untuk diberikan pada hamster. Hamster
yang terkena penyakit diabetes tidak diperbolehkan mendapat makanan yang mengandung
kadar gula yang tinggi, seperti buah dan jagung. Komponen makanan hamster dibagi jadi 3
kategori: kering, segar, dan makanan binatang. [10]
2.2 Mikrokontroller ATMega8535
Mikrokontroler merupakam chip cerdas yang menjadi tren dalam pengendalian dan
otomatisasi, terutama dikalangan mahasiswa. Dengan banyak jenis keluarga, kapasitas
memori, dan berbagai fitur, mikrokontroler menjadi pilihan dalam aplikasi prosesor mini
untuk pengendaliaan skala kecil. [1]
Mikrokontroler AVR (Alf and vegard’s Risc processor) dari Atmel ini menggunakan
arsitektur RISC (Reduced Instruction Set Computer) yang artinya prosesor tersebut memiliki
set instruksi program yang lebih sedikit dibandingkan dengan MCS-51 yang menerapkan
arsitektur CISC (Complex Instruction Set Computer). [1]
Hampir semua instruksi prosesor RISC adalah instruksi dasar (belum tentu sederhana),
sehinggga instruksi-instruksi ini umumnya hanya memerlukan 1 siklus mesin untuk
menjalankannya. Kecuali instruksi percabangan membutuhkan 2 siklus mesin. RISC biasanya
dibuat dengan arsitektur Harvard, karena arsitektur ini yang memungkinkan untuk membuat
eksekusi instruksi selesai dikerjakan dalam satu atau dua siklus mesin, sehingga semakin cepat
dan handal. Proses downloading programnya relatif lebih mudah karena dapat dilakukan
langsung pada sistemnya.
Sekarang ini, AVR dapat dikelompokkan menjadi 6 kelas, yaitu keluarga ATtiny,
keluarga AT90Sxx, keluarga ATmega, keluarga AT90CAN, keluarga AT90PWM dan
AT86RFxx. Pada dasarnya membedakan masing-masing kelas dala, peripheral, dan fungsinya,
sedangkan dari segi arsitektur dan instruksi yang digunakan, mereka hampir sama. Sebagai
pengendali utama dalam pembuatan robot ini digunakan salah satu produk ATMEL dari
keluarga ATMega yaitu ATMega8535. [1]
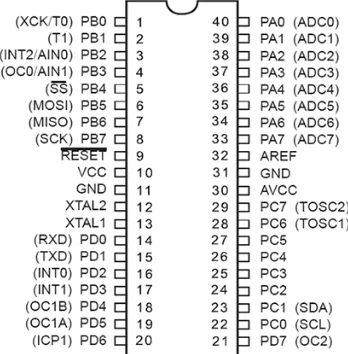
2.2.1 Arsitektur dan Konfigurasi
Pin
ATMega8535
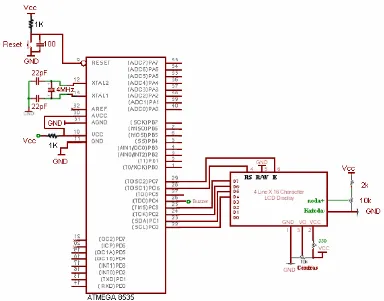
Dalam penelitian ini, mikrokontroler yang digunakan adalah ATMega8535.
Mikrokontroler ini dipilih karena spesifikasi dan fitur yang lengkap [1]. Konfigurasi lengkap
dari pin ATMega8535 dapat dilihat pada Gambar 2.1. Konfigurasi pin dan arsitektur yang
a. Pin10, merupakanpinyang berfungsi sebagaipinmasukan catu daya / VCC.
b. Pin11 dan 31, merupakanpinyang berfungsi sebagaiground.
c. Port D.0 (RXD) dan port D.1 (TXD), merupakan port USART (Universal Asyncronous
Receiver/ Transmitter) yang difungsikan untuk komunikasi serial.
Gambar 2.1. KonfigurasipinATMega8535
d. PortD (PD0..PD7) danportA (PA0..PA1), sebagaipinI/O dua arah dan ADC.
e. PortB.0 danportB.1,portini merupakanportI/O dua arah.
f. Pin9, sebagaipin resetmikrokontroler.
2.3 Fotodioda (
Photodiode
)
Fotodioda adalah salah satu alat yang dibuat untuk berfungsi paling baik berdasarkan
kepekaannya terhadap cahaya. Pada dioda ini, sebuah jendela memungkinkan cahaya masuk
melalui pembungkus dan mengenai persambungan pn. Silikon, yaitu bahan material di mana
transistor dan rangkaian terintegrasi dibuat, akan mengalami perubahan resistansi listrik saat
dikenai cahaya. Fotodioda sebenarnya tidak berbeda dari dioda biasa yang ditempatkan di
dalam material transparan, sehingga memungkinkan cahaya mengenainya (sedangkan pada
listrik, fotodioda dapat digunakan untuk menghasilkan sinyal listrik yang besarnya tergantung
pada jumlah cahaya yang mengenainya. [6]
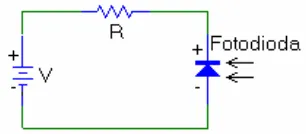
Gambar 2.2 menunjukan lambang skematis fotodioda. Panah yang mengarah ke dalam
melambangkan cahaya yang datang. Sumber dan tahanan seri memberikan prategangan balik
pada fotodioda. Bila cahaya makin cerah, arus balik naik. Dalam fotodioda yang lazim, arus
balik tersebut besarnya sedikit puluhan mikroamper. [6]
Gambar 2.2 Simbol Rangkaian Fotodioda
2.4
Light Emiting Diode
(LED)
LED adalah dioda berprategangan maju, dimana elektron bebas melintasi sambungan
dan jatuh ke dalam lubang (hole). Ketika elektron jatuh dari tingkat energi tinggi ke rendah,
elektron akan mengeluarkan energi. Pada diode biasa, energi dikeluarkan dalam bentuk panas.
Tetapi pada LED, energi dikeluarkan dalam bentuk sinar. Dengan menggunakan elemen
seperti gallium, arsenik, dan fosfor, pabrik dapat memproduksi LED berwarna merah, hijau,
kuning, biru, orange / jingga, dan inframerah / infrared (tak terlihat). Gambar 2.3
menunjukkan simbol LED. [6]
Gambar 2.3 Simbol LED
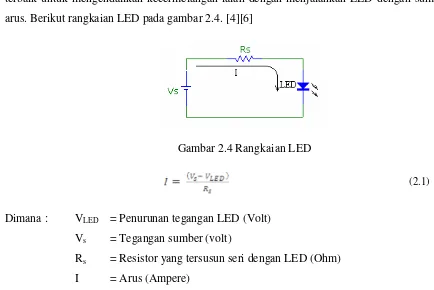
2.4.1 Tegangan dan Arus LED
LED mempunyai penurunan tegangan lazimnya dari 1,5 V sampai 2,5 V untuk arus di
kelonggaran, dan sebagainya. Kecermelangan LED tergantung dari arusnya. Idealnya, cara
terbaik untuk mengendalikan kecermelangan ialah dengan menjalankan LED dengan sumber
arus. Berikut rangkaian LED pada gambar 2.4. [4][6]
Gambar 2.4 Rangkaian LED
(2.1)
Dimana : VLED = Penurunan tegangan LED (Volt)
Vs = Tegangan sumber (volt)
Rs = Resistor yang tersusun seri dengan LED (Ohm)
I = Arus (Ampere)
Makin besar tegangan sumber, makin kecil pengaruh VLED. Dengan kata lain Vs yang besar
menghilangkan pengaruh perubahan tegangan VLED. Biasanya, arus LED ada di antara 10 mA
sampai 50 mA karena daerah ini memberikan cahaya yang cukup untuk banyak pemakai.[4][6]
2.5 Optocoupler
Optocoupler disebut juga optoisolator adalah komponen yang terdiri dari dioda
pemancar radiasi sinar infra merah (LED inframerah) dan fotodioda atau fototransistor sebagai
penerima dalam satu kemasan. Dengan LED pada sisi masukan dan fotodioda pada sisi
keluaran. Perhatikan gambar 2.5, tegangan sumber V1dan tahanan seri R1 menghasilkan arus
melalui LED. Sebagai gantinya, cahaya dari led mengenai fotodioda, dan ini menyebabkan
timbulnya arus balik I2. Dengan menambahkan tegangan – tegangan melingkari simpal
Gambar 2.5 Rangkaian Optocoupler
(2.2)
Atau
(2.3)
Perhatikan bahwa tegangan keluaran tergantung pada arus I2. Bila tegangan masukan
V1 berubah, intensitas cahayanya juga berubah. Ini berarti bahwa tegangan keluar berubah
sejalan dengan tegangan masuk. Itulah sebabnya mengapa gabungan LED dan fotodioda
disebut Optocoupler. [6]
Keuntungan utama optocoupler ialah pemisahan secara listrik antara rangkaian masuk
dan rangkaian keluarnya. Dengan optocoupler, hubungan yang ada antara masukan dan
keluaran hanya seberkas cahaya. Karena hal ini, kita dapat memperoleh resistansi penyekatan
di antara dua rangkaian itu dalam ribuan megaohm. [6]
2.6 Saklar Batas (
Limit Switch
)
Saklar batas atau lebih dikenal denganLimit switchmerupakan salah satu jenis kontak
yaitu komponen yang berfungsi untuk menghubungkan dan memutuskan arus. Sifat dari limit
switch ini yaitu kontak yang terputus atau tersambung saat ditekan dan akan kembali ke
keadaan semula saat tidak ditekan (momentary contact). Pada limit switch terdapat tiga
terminal yaitu common (COM), terminal normally open (NO) dan terminal normally closed
(NC).
Terminal NO merupakan terminal yang pada kondisi normal berupa kontak terputus
atau tidak tersambung dengan COM sedangkan terminal NC berupa kontak pada kondisi
yang tahan busur api (arc) yang disebabkan saat arus terputus atau tersambung. Simbol
keadaanlimit switchada pada gambar 2.6. [7]
Gambar 2.6 KondisiLimit SwitchNO dan KondisiLimit SwitchNC.
2.7
Push Button Switch
Swich Push Button adalah saklar tekan yang berfungsi untuk menghubungkan atau memisahkan bagian – bagian dari suatu instalasi listrik satu sama lain (suatu sistem saklar
tekan push button terdiri dari saklar tekan start. Stop reset dan saklar tekan untuk emergency.
Push button memiliki kontak NC (normally close) dan NO (normally open), yang mana
bentuk fisik jenispush buttondapat dilihat pada gambar berikut ini :
Gambar 2.7Push Buttun
Prinsip kerjaPush Buttonadalah apabila dalam keadaan normal tidak ditekan maka
kontak tidak berubah,apabila ditekan maka kontak NC aka berfungsi sebagaistop
(memberhentikan) dan kontak NO akan berfungsi sebagaistart(menjalankan) biasanya
digunakan pada sistem pengontrolan motor – motor induksi untuk menjalankan mematikan
2.8 Aktuator Menggunakan Motor DC
Motor DC merupakan salah satu penggerak (actuator) pada sistem kontrol yang mudah
diatur arah putar dan kecepatannya. Motor DC ada bermacam – macam dan pada dasarnya
dibedakan adalah voltase-nya dan jenis arah putarnya. Arah putar motor DC ada dua yaitu CW
(clock wise/ searah jarum jam) dan CCW (Counter clock wise/ berlawanan arah jarum jam). Pengaturan arah putar motor DC dilakukan dengan mengubah polaritas tegangannya
pada terminal motor DC. Untuk mengubah polaritas tegangan pada terminal motor DC
dilakukan dengan saklar, rangkaian control relay maupun rangkaian pensaklaran elektronik
dengan jembatan H.
Gambar 2.8 merupakan jembatan H yang digunakan untuk mengubah arah putar motor
DC.
Gambar 2.8 Kontrol Motor DC Menggunakan Jembatan H
Pada dasarnya motor akan berputar jika kondisi SW1 dan SW2 saling berlawanan yaitu
SW1ONdan SW2 OFFatau SW1OFFdan SW2ON. Ketika SW1ONdan SW2 OFFmaka
arus (I1) mengalir dari a melewati motor kemudian masuk d dan ke ground sehingga motor
akan berputar CW, begitu juga jika SW1 OFF dan SW2 ON maka arus (I2) mengalir dari b
melalui motor masuk ke c dan kegroundsehingga motor akan berputar CCW.
Ketika SW1 dan SW2 pada kondisiONpada saat yang bersamaan maka tidak ada arus
SW2 pada kondisiOFFpada saat yang sama maka tidak ada arus yang melewati motor yang mengakibatkan motor tidak akan berputar.
Untuk mengontrol kecepatan motor saklar penghubung antara catu daya dengan motor
dibuka dan ditutup, waktu saklar ditutup atau dibuka berbeda – beda yang bertujuan untuk
memberikan rata – rata tegangan ke motor berbeda – beda pula. Teknik ini dinamakan dengan
pulse-width modulation seperti yang diilustrasikan pada gambar 2.9. V adalah tegangan catu yang diberikan ke motor dan t adalah waktu. Kecepatan motor DC dapat diatur dengan
mengubah rasiopulse-width: [2]
(2.5)
Gambar 2.9Pulse-Width Modulation
2.9 Prinsip Kerja
Solenoid
Jika ada arus listrik mengalir pada sebuah kawat, maka di sekitar kawat tersebut akan
muncul medan magnet. Jika terjadi perubahan fluks magnet pada sebuah sirkuit tertutup, maka
dalam sirkuit tersebut akan muncul gaya gerak listrik. Arah arus GGL tersebut adalah
sedemikian hingga medan magnet yang dihasilkannya akan melawan perubahan fluks magnet
tersebut. Sehingga bila solenoid diberi arus listrik maka akan terjadi pergerakan dari tuas/inti
Gambar 2.10 Prinsip kerjasolenoid
2.10 LCD (Liquid Crystal Display)
2.10.1 Gambaran Umum
Banyak sekali kegunaan LCD dalam perancangan suatu sistem yang menggunakan
mikrokontroler. LCD (Liquid Crystal Display) adalah komponen yang berfungsi untuk
menampilkan suatu karakter pada suatu tampilan (display) dengan bahan utama yang
digunakan berupa Liquid Crystal. Apabila diberi arus listrik sesuai dengan jalur yang telah
dirancang pada konstruksi LCD, Liquid Crystal akan berpendar menghasilkan suatu cahaya
dan cahaya tersebut akan membentuk suatu karakter tertentu. Gambar konstruksi LCD dapat
dilihat pada gambar 2.11. [8]
Gambar 2.11 Konstruksi LCD
Untuk LCD 016M002A merupakan modul LCD dengan tampilan 4 x 16 (4 baris, 16 kolom)
dengan konsumsi daya rendah. Modul tersebut dilengkapi dengan mikrokontroler yang
didesain khusus untuk mengendalikan LCD. Mikrokontroler HD44780 buatan Hitachi yang
berfungsi sebagai pengendali LCD memiliki CGROM (Character General Read Only
Gambar 2.12 LCD 4 x 16
LCD bertipe ini memungkinkan pemrogram untuk mengoperasikan komunikasi data
secara 8 bit atau 4 bit. Jika menggunakan jalur data 4 bit akan ada 7 jalur data (3 untuk jalur
kontrol dan 4 untuk jalur data). Jika menggunakan jalur data 8 bit maka akan ada 11 jalur data
(3 untuk jalur kontrol dan 8 untuk jalur data). Tiga jalur kontrol ke LCD ini adalah EN
(Enable), RS (Register Select) dan R/W (Read/Write). Gambar 2.12 adalah contoh LCD (4 x 16) yang digunakan. [8]
Tabel 2.1 menunjukkan fungsi dan konfigurasi dari setiap pin LCD yang digunakan.
Tabel 2.1 Konfigurasi Pin LCD
2.10.2 Register
016M002A memiliki dua buah register yang aksesnya diatur menggunakan kaki RS.
Pada saat RS berlogika 0, register yang diakses adalah register perintah, dan pada saat RS
2.10.2.1 Register Perintah
Register tersebut adalah register di mana perintah-perintah dari mikrokontroler ke
016M002A pada saat proses penulisan data atau tempat status dari 016M002A dapat dibaca
pada saat pembacaan data. [8]
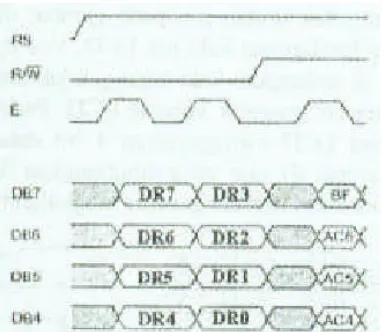
a. Penulisan Data ke Register Perintah
Penulisan data ke register perintah dilakukan dengan tujuan mengatur tampilan
LCD, inisialisasi, dan mengatur Address Counter maupun Address Data. Gambar 2.12
menunjukkan proses penulisan data ke register perintah menggunakan mode 4-bit
interface. Kondisi RS berlogika 0 menunjukkan akses data ke register perintah. RW
berlogika 0 menunjukkan proses penulisan data akan dilakukan. Nibble tinggi (bit-7
sampai bit-4) terlebih dahulu dikirimkan diawali pulsa logika 1 pada E clock. Selanjutnya
Nibble rendah (bit-3 sampai bit-0) dikirimkan diawali pulsa logika 1 pada E clock lagi.
Untuk mode 8-bitinterface, proses penulisan dapat dilakukan langsung 8-bit
(bit-7...bit-0) diawali pulsa logika 1 pada Eclock.
Gambar 2.13 Diagram Pewaktuan Penulisan Data ke Register Perintah Mode 4-bit 13
b. Pembacaan Data dari Register Perintah
Proses pembacaan data dari register perintah biasa digunakan untuk melihat status
busy dari LCD atau membaca Address Counter. RS diatur pada logika 0 untuk akses ke
Pembacaan 4-bit Nibble tinggi diawali pulsa logika 1 pada E Clock dan kemudian 4-bit
Nibble rendah dibaca diawali pulsa logika 1 pada E clock. Untuk mode 8-bit interface,
pembacaan 8-bit (nibble tinggi dan rendah) dilakukan sekaligus diawali sebuah pulsa
logika 1 pada Eclock.
Gambar 2.14 Diagram Pewaktuan Pembacaan Data ke Register Perintah Mode 4-bit
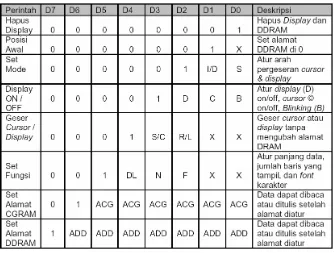
Variasi perintah-perintah yang dapat diakses pada LCD jenis 016M002A dapat dilihat pada
tabel 2.2.
Keterangan:
2.10.2.2 Register Data
Register data adalah register di mana mikrokontroler dapat menuliskan atau membaca
data dari atau ke dalam DDRAM. Penulisan data pada register akan menempatkan data
tersebut ke DDRAM sesuai dengan alamat yang telah diatur sebelumnya.
a. Penulisan Data ke Register Data
Penulisan data pada register data dilakukan untuk mengirimkan data yang akan
ditampilkan pada LCD. Proses diawali dengan logika 1 pada RS yang menunjukkan akses
ke register data, kondisi R/W diatur pada logika yang menunjukkan proses penulisan data.
Data 4-bit Nibbletinggi (bit-7 hingga bit-4) dikirimkan diawali pulsa logika 1 pada sinyal
E clock dan kemudian diikuti 4-bit Nibble rendah (bit-3 hingga bit-0) yang juga diawali
Gambar 2.14 Diagram Pewaktuan Penulisan Data ke Register Data Mode 4-bit
b. Pembacaan Data dari Register Data
Pembacaan data dari register data dilakukan untuk membaca kembali data yang
tampil pada LCD. Proses dilakukan dengan mengatur RS pada logika 1 yang menunjukkan
adanya proses pembacaan data. Data 4-bitNibbletinggi (bit-7 hingga bit-4) dibaca dengan
diawali adanya pulsa logika 1 pada E clock dan dilanjutkan dengan data 4-bit Nibble
rendah (bit-3 hingga bit-0) yang juga diawali dengan pulsa logika 1 pada Eclock.
Gambar 2.15 Diagram Pewaktuan Pembacaan Data dari Register Data Mode
2.11 IC
Driver
L293D
IC ini merupakan IC driver tegangan tinggi (high voltage) hingga mencapai 36 V.
keempat saluran driver berarus tinggi (600mA per-saluran dan 1,2A puncak arus keluaran
(non repetitive) persaluran) dirancang untuk level logika TTL atau DTL dan men-drive beban
Untuk memudahkan maka digunakan sebagai dua jembatan (bridge), setiap pasang
saluran (channel) dilengkapi dengan masukan enable. Di dalam IC ini juga sudah terdapat
dioda pengaman yang terdiri dari 4 buah. IC ini bisa digunakan untuk aplikasiswitching pada
frekuensi sampai 5kHz. Masukan untuk supply terpisah agar mudah digunakan untuk bekerja
pada tegangan yang rendah. Gambar 2.16 merupakan gambar blok diagram dan pin
connectionsdari IC L293D.[3]
BAB III
RANCANGAN PENELITIAN
3.1. Pra Penelitian
Dari hasil pengamatan hamster yang telah dilakukuan maka didapat beberapa data
tentang pola makan hamster, yaitu :
Hamter makan dua kali sehari sekitar antara jam 6 – 7 pagi dan jam 6 – 7 malam
Hamster sangat menyukai makanan yang baru diberikan meskipun itu makanan yang
telah berada sebelumnya di dalam kandang dan diberikan lagi
Jumlah makanan hamster yang dibutuhkan hamster ± 5gr / ekor
Data-data yang telah didapat di atas merupakan data yang diambil dalam pemenuhan
karakteristik hamster dalam pembuatan alat. Pengambila data ditujukan agar didapat data yang
valid tentang pola makan hamster yang tidak terdapat dalam referensi.
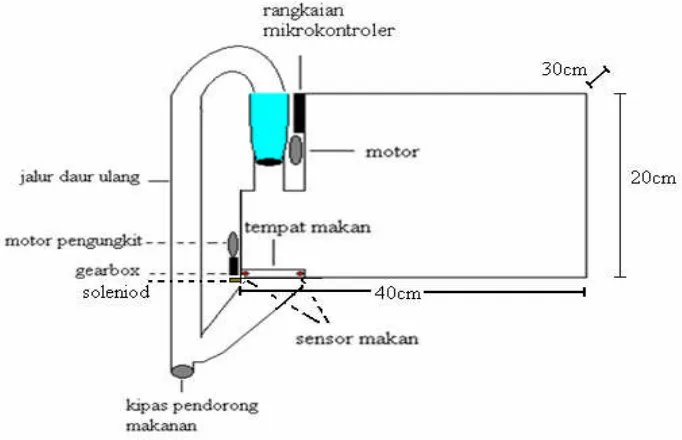
3.2. Model Sistem
Gambar 3.1 Blok Diagram Sistem Secara Umum
Gambar 3.1 merupakan diagram sistem secara umum yang akan digunakan pada
penelitian. Pada awalnya user memasukan input sesuai dengan banyaknya jumlah hamster
dalam kandang. Setelah dipilih banyaknya makanan yang kan dimasukkan (L,M,H) maka
motor makan akan bekerja. Lamanya motor bekerja untuk membuka pintu sesuai denganinput
yang dipilih. Setelah pakan terisi sesuai dengan banyak makanan yang diinginkan, motor akan
menutup pintu jalur keluar makan. Setelah 12 jam berlalu, sensor akan membaca apakah ada
makanan pada tempat makan atau tidak. Jika ada makanan, makasolenoidakan aktif dan akan
membuang makanan yang ada pada tempat makan. Setelah 1 menit berlalu, maka motor
pembuangan aktif dan akan menutup kembali pintu pembuangan tersebut. Makanan yang telah
terbuang akan diangkat kembali ke dalam botol penampungan daur ulang makanan. Daur
ulang makanan yaitu makanan yang telah ada atau sudah diberikan tidak habis dimakan dan
akan diambil kembali dan diberikan lagi pada saat pemberian makan. Hal ini dilakukan karena
dari hasil penelitian beberapa hari, hamster sangat menggemari makanan yang baru diberi
walaupun makanan itu sudah diberikan sebelumnya dan tidak dihabiskan.
Pendaur - ulangan makanan dilakukan agar dapat meminimalisir kerugian pada
makanan. Kerugian ini mencakup makanan yang terbuang sia-sia (sisa - sisa makanan) karena
tidak dimakan oleh hamster tersebut. Setelah satu setengah jam berlalu dari saatsolenoidaktif,
sensor daur ulang akan membaca apakah ada makanan dalam botol penampung daur ulang
atau tidak. Jika terdapat makanan, maka motor daur ulang akan bekerja membuka katup
pemberian makanan daur ulang. Jika tidak terdapat makanan, maka motor makan akan bekerja
membuka katup pemberian makanan baru. Pemberian pakan dilakukan dua kali sehari.
Gambar 3.2 berikut merupakan desain jadi dari alat otomatisasi sistem pakan hamster
Tampak samping
LCD dalam pemberian pakan ini digunakan untuk menampilkan waktu yang
diinginkan dalam pemberian makanan sehari - hari. LCD juga akan menampilkan tulisan
sebagai tanda bahwa stok makanan yang ada di dalam botol telah habis dan siap diberikan
makanan yang baru.
3.3. Alur Perancangan Sensor
Dalam penelitian ini akan digunakan dua sensor sebagai pendeteksi, yaitu sensor
makan dan sensor daur ulang. Sensor yang digunakan adalah LED inframerah yang digabung
dengan fotodioda dengan prinsip kerja seperti optocoupler. Keluaran sensor akan digunakan
sebagai masukan pada mikrokontroler. Gambar 3.3 merupakan diagram sistem sensor secara
umum
Gambar 3.3 Diagram Sistem Sensor Secara Umum
3.3.1 Sensor Makan
Gambar 3.4 Desain Sensor makan
Sensor makan ini terdiri atas LED inframerah sebagai sumber cahaya dan fotodioda
sebagai penerimanya sehingga bekerja seperti optocoupler. Sensor akan mendeteksi ada
makanan atau tidak. Jika terdeteksi ada makanan maka keluaran sensor berlogika 0, dan jika
terdeteksi tidak ada makanan keluaran sensor akan berlogika 1. Sensor ini terdapat satu buah
pasang sebagai pengaktif penggerak (motor DC). Keluaran sensor akan menjadi masukan
untuk mikrokontroler (ATMega 8535) padaportPA0 untuk menghidupkan motor. Gambar 3.4
Penjelasan berikut adalah penjelasan untuk sensor. Berdasarkan dasar teori dalam bab
II, arus maximum LED adalah 150 mA dan VLEDadalah 1,5 Volt. Dengan Vcc (catu daya) 5
Volt, maka dapat dicari Rsmaximum dan Rsminimum dengan persamaan 2.2 sebagai berikut
Resistor yang digunakan dalam perancangan adalah 330 Ω dikarenakan terdapat di pasaran
dan agar mendapat nilai arus yang kecil namun masih termasuk dalam nilai optimum (10m A
– 150mA), yaitu :
Berdasarkan perhitungan di atas didapat arus 10,6m A. Pengurangan arus bertujuan agar
intensitas cahaya yang dikeluarkan LED inframerah tidak terlalu besar sehingga jika terhalang
oleh benda berwarna hitam tidak akan mengaktifkan fotodioda.
Rind dapat dicari dengan menggunakan persamaan yang sama dengan Rs sehingga
memiliki besar resistansi yang sama dengan Rs. Rindmerupakan resistor pengaman untuk LED
indikator (LED berwarna merah). LED indikator akan menyala (on) jika keluaran komparator
berlogika 0 (0 volt /Ground) dan akan mati (off) jika keluaran komparator berlogika 1 (5 volt /
Vcc). Rd merupakan resistansi yang akan menentukan tegangan keluaran fotodioda. Tabel 3.1
merupakan tabel data pra penelitian untuk mengetahui karakteristik fotodioda dan Gambar 3.5
merupakan gambar rangkaian secara skematik.
Tabel 3.1 Karakteristik Fotodioda Hasil Pra Penelitian
RD
(k Ohm)
Kondisi Ruang VIR VD
1 Terbuka 1,194 V 4,48 V
Tertutup 1,194 V 4,54 V
2 Terbuka 1,194 V 3,9 V
Tertutup 1,194 V 4,38 V
3 Terbuka 1,194 V 3,78 V
Tertutup 1,194 V 4,33 V
4 Terbuka 1,194 V 133,2 mV
Tertutup 1,194 V 160 mV
Dari tabel 3.1, pada resistor RD = 3k Ohm memiliki beda tegangan ON – OFF yang cukup
tinggi saat cahaya inframerah terhalang benda dengan jarak 12 cm, yaitu:
Sehingga yang digunakan untuk RDadalah resistor 3 kΩ.
3.4. Perancangan Motor DC Sebagai Aktuator
Gambar 3.7 Rangkaian Skematik Untuk Pembuka Pintu Pembuangan Makanan dan Kipas
Daur Ulang
Motor DC dipilih sebagai aktuator dikarenakan motor DC ini mudah untuk
dikendalikan (mudah diatur kecepatannya). Motor DC yang digunakan dalam perancangan alat
ini ada tiga buah. Dua buah motor sebagai pembuka tutup botol, dan satu buah digunakan
sebagai pembuka dan penutup pintu pembuangan makanan dalam kandang. Masing – masing
motor memerlukan driver yang digunakan untuk menguatkan arus keluaran mikrokontroler.
Drivermotor yang digunakan adalah ICdriver, yaitu L293D.
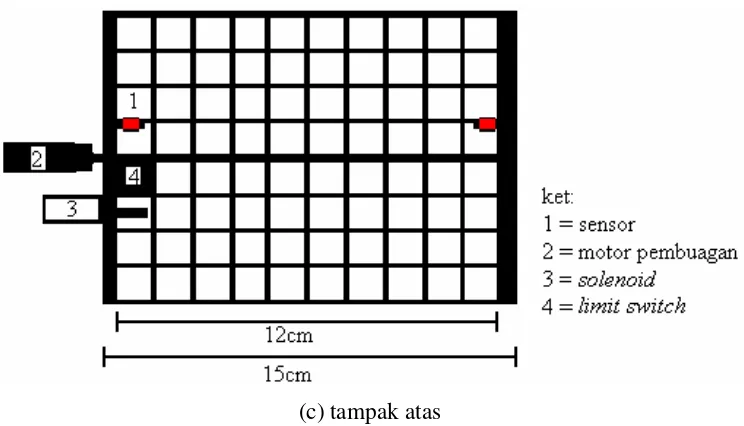
(c) tampak atas
Gambar 3.8 Gambar Sistem Pembuangan Makanan
Pakan yang masih berada dalam kandang akan dibuang agar tidak busuk dalam
kandang. Pakan dibuang dengan cara menjatuhkan makanan. Untuk lebih jelasnya dapat
dilihat pada gambar 3.8.
Saat pembuangan makanan berlangsung sensor makan akan mendeteksi makanan. Jika
ada makanan terdeteksi maka solenoid akan diaktifkan sehingga alas bawah kandang tidak
terkait. Makanan akan jatuh ke bawah. Jala-jala penampung berfungsi sebagai alat yang
menahan hamster agar tidak ikut terjatuh. Setelah 30 detik berlalu dari aktifnya solenoid, maka
motor pembuangan akan aktif mengangkat alas bawah kandang sehingga menutup kembali.
Alas bawah kandang akan diangkat sampai menyentuh limit switch. Setelah limit switchaktif
(tertekan) makasolenoiddan motor pembuangan akan dimatikan (non aktif).
3.5.2.Sistem Pengangkatan Pakan
Pengangkatan pakan hamster menggunakan sistem tembak menggunakan fan yang
bekerja sepertiblower.Outputmikrokontroller akan dihubungkan pada IC driver L923D untuk
dikuatkan arusnya terlebih dahulu sebelum dihubungkan pada kipas pengangkut (fan). Fan
tersebut digunakan sebagai alat untuk mengangkat atau mendorong makanan ke atas (botol
3.6. LCD
LCD ini digunakan sebagai penampil keluaran mikrokontroler khusus untuk mode
tampilan pesan. LCD yang digunakan adalah LCD yang menggunakan chipkontroler Hitachi
HD44780, misalnya 016M002A. LCD bertipe ini memungkinkan pemrogram untuk
mengoperasikan komunikasi data secara 8 bit atau 4 bit. Jika menggunakan jalur data 4 bit
akan ada 7 jalur data (3 untuk jalur kontrol dan 4 untuk jalur data). Jika menggunakan jalur
data 8 bit maka akan ada 11 jalur data (3 untuk jalur kontrol dan 8 untuk jalur data). Tiga jalur
kontrol ke LCD ini adalah EN (Enable), RS (Register Select) dan R/W (Read/Write).
Interface LCD merupakan sebuahparallel bus, dimana hal ini sangat memudahkan dan
sangat cepat dalam pembacaan dan penulisan data dari atau ke LCD. Kode ASCII yang
ditampilkan sepanjang 8 bit dikirim ke LCD secara 4 atau 8 bit pada satu waktu. Jika mode 4
bit yang digunakan, maka 2 nibble data dikirim untuk membuat sepenuhnya 8 bit (pertama
dikirim 4 bit MSB lalu 4 bit LSB dengan pulsa clock EN setiap nibblenya). Mengirim data
secara paralel baik 4 atau 8 bit merupakan 2 mode operasi primer. Untuk membuat sebuah
aplikasi interface LCD. Penentuan mode operasi merupakan hal yang paling penting. Mode 8
bit sangat baik digunakan ketika kecepatan menjadi keutamaan dalam sebuah aplikasi dan
setidaknya minimal tersedia 11 pin I/O (3 pin untuk kontrol, 8 pin untuk data). Sedangkan
mode 4 bit minimal hanya membutuhkan 7 bit (3 pin untuk kontrol, 4 untuk data). Karena
dalam penelitian ini kecepatan tidak sangat diutamakan, maka dipilih mode 4 bit. Interface
Gambar 3.9 Interface LCD Mode 4 Bit
3.7.Perangkat Lunak
3.7.1.Diagram Alir Program Utama
Gambar 3.10 merupakan diagram alir perangkat lunak untuk otomatisasi sistem pakan
hamster. Untuk start awal, input banyaknya makanan diberikan. Program akan membaca
apakah L=1 ataukah tidak. Jika L=1 maka motor makanondan membuka pintu penutup botol
makanan untuk menurunkan makanan ke dalam kandang. Setelah 5 detik motor aktif, maka
motor akan diberhentikan. Jika L=0 maka program akan mebaca apakah M=1. Jika M=1 maka
motor makan ondan membuka pintu penutup botol makanan untuk menurunkan makanan ke
dalam kandang. Setelah 10 detik motor aktif, maka motor akan diberhentikan. Jika M=0 maka
program akan mebaca apakah H=1. Sama halnya dengan kedua syarat di atas jika H=1 maka
motor makan ondan membuka pintu penutup botol makanan untuk menurunkan makanan ke
dalam kandang. Setelah 15 detik motor aktif, maka motor akan diberhentikan. Timer akan
apakah ada makanan dalam kandang (tempat makan) atau tidak. Jika dideteksi tidak ada
makanan lagi, maka motor makan akanondan membuka pintu penutup botol makanan sesuai
dengan input yang diberi diawal. Sistem berjalan sesuai dengan kinerja sebelumnya. Jika
dideteksi ada makanan, maka solenoid akan di-on-kan sehingga pintu pembuangan akan
terbuka. Makanan akan terbuang menuju tempat pengangkatan. Setelah 30 detik berjalan dari
saatsolenoiddi-on-kan maka motor pembuanganondan menutup pintu pembuangan makanan
sampai menyentuhlimit switch. Setelah pintu menyentuhswitchmakasolenoiddan motor DC
akan di-off-kan.Fan di-on-kan dan mengangkat makanan ke dalam botol penampungan daur
ulang Pengangkatan makanan akan berjalan selama empat menit. Setelah dua menit berlalu
dari saat fan di-on-kan maka motor daur ulang akan di-on-kan membuka pintu daur ulang.
Disaat yang samafandi-off-kan. Motor daur di-off-kan setelah 10 detik berlalu dan pintu akan
ditutup kembali. Motor makan akan di-on-kan dan mebuka pintu makan selama 10 detik
Setelah 12jam berlalu, maka sensor makan batas bawah akan mendeteksi ada tidaknya
`
Gambar 3.10 Diagram Alir Perangkat Lunak Otomatisasi Sistem Pakan Hamster
3.7.1.Diagram Alir Program LCD
Pada program LCD ini, LCD digunakan sebagai penampil waktu pemberian pakan,
makanan ataukah sudah habis). LCD akan mendapat masukan dari mikro ATMega 8535.
Gambar 3.11 di bawah merupakan gambar diagram alir perangkat lunak untuk display LCD.
Gambar 3.11 Diagram Alir Perangkat Lunak Display LCD Pemberian Pakan
Pada awalnya kondisi portpada PD0 sampai dengan PD2 masih dalam keadaan tidak
aktif atau brlogika 0. Setelah input diberikan (dimasukkan) maka port akan berlogika 1 dan
akan mengaktifkan timer yang diingikan sesuai input yang diberi. Input dalam hal ini yaitu
banyaknya makanan yang akan diberi sesuai dengan jumlah hamster dalam kandang.
masukan pada LCD untuk menampilkan kata “sedikit”. Jika tidak maka mikro akan membaca
apakah M berlogika 1, jika iya maka mikro akan member masukan pada LCD untuk
menampilkan kata “sedang”. Jika tidak maka mikro akan membaca apakah H berlogika 1, jika
iya maka mikro akan member masukan pada LCD untuk menampilkan kata “banyak”. Jika
tidak maka program akan berhenti. Hal ini berarti dianggap tidak ada masukan dan alat tidak
berjalan.
Untuk display LCD dalam penggunaannya yang berkaitan dengan penampilan waktu makan
akan di-setting langsung dari mikrokontroler untuk menampilkan waktu tiap 10jam.
BAB IV
HASIL DAN PEMBAHASAN
Untuk mengetahui suatu alat atau program dapat bekerja dengan baik diperlukan
pengujian terhadap kinerja alat atau program tersebut. Melalui pengujian-pengujian tersebut,
maka akan diperoleh data yang dapat memperlihatkan bahwa perangkat keras dan lunak yang
dirancang telah bekerja dengan baik atau tidak. Dari data tersebut dapat dilakukan analisis
terhadap proses kerja alat yang kemudian dapat digunakan untuk menarik kesimpulan dari apa
yang disajikan dalam tugas akhir ini.
Untuk menganalisis rancangan rangkaian otomatisasi sistem pakan hamster berbasis
mikrokontroler, dilakukan pengujian dari tiap-tiap unit bagian rangkaian pada pengukuran
masukan dan keluaran rangkaian. Pengujian rangkaian yang utama adalah pengujian Hardware.
Dalam penerapannya, terdapat perubahan rancangan. Gambar di bawah ini merupakan desain
jadi sistem pakan otomati sistem pakan hamster yang telah diubah.
Gambar 4.1 Desain Jadi Sistem Pakan Otomatis Hamster yang Telah Diubah
Selain pengujian utama, untuk mendukung kebenaran data – data yang diperoleh
dilakukan pengujian sebagai berikut : pengujian rangkaian sensor pendeteksi ada tidaknya
makanan dalam kandang dan pembahasan software. Gambar 4.2 merupakan gambar alat yang
telah dibuat
Gambar 4.2 Gambar alat
Gambar 4.2 di atas merupakan gabar alat yang telah dibuat. Pusat pengendali sistem
berada pada kontrol sistem (nomor 5). Pada awalnya input (L,M,H) diberikan. Sensor akan
mendeteki apakah ada makanan di dalam kandang ataukah tidak. Jika tidak, maka motor pakan
akan bekerja membuka pintu pakan (makanan diberikan). Setelah timer berjalan 12 jam, maka
sensorakan aktif dan mendeteksi kembali. Jika terdapat makanan di dalam kandang, maka motor pembuang pakan akan bekerja (sisa makanan di buang ke dalam wadah daur ulang). Motor daur
ulang akan bekerja setelah motor pembuang pakan berhenti. Pakan akan diangkat dan dituangkan
ke dalam wadah penampung makanan (makanan yang akan diberikan atau dimasukan dalam
kandang).
4.1 Pengujian
Hardware
Dalam pengujianhardwareini meliputi :
2. Pengujian keberhasilan Motor Makan
3. Pengujian keberhasilan Motor Pembuangan
4. Pengujian keberhasilan Motor Daur Ulang
5. Pengujian keberhasilan Sensor
Selain pengujian utama di atas, untuk mendukung kebenaran data-data yang diperoleh
dilakukan pengujian kontrol rangkaianrelaysebagai pengendali motor.
4.1.1 Pengujian control
relay
Gambar 4.3RelayPutaran Motor Pakan dan Daur Ulang
Pada gambar diatas memiliki masukan pada kaki-kaki J1 (conector) berupa : dua (2) buah
kaki motor yang terhubung pada kaki tiga (3) dan empat (4), dua (2) buah kaki yang digunakan
limit switchpada kaki lima (5) dan kaki enam (6), sedangkan kaki ke tujuh (7) digunakan sebagai
masukan (trigger) dari mikrokontroler. Gambar di atas merupakan rangkaian relay sebagai
pengendali putaran motor pakan dan daur ulang. Mikro akan memberi masukan sesuai dengan
input (L, M, H) yang diberikan pada mikro. Masukkan mikro berupa trigger yang mewakili banyaknya jumlah hamster di dalam kandang. PWM pada gambar sebagai catu (suplay tegangan)
untuk relay. Pada awalnyatrigger(kaki no.7 pada J1) dan mengaktifkan RL1 dan RL4 sehingga motor aktif dan berputar ccw. Setelah katup pakan (motor pakan) atau wadah daur ulang (motor
daur ulang) menyentuh limit switch (kaki 6 pada J1) maka RL3 dan RL2 akan aktif dan
menonaktifkan RL4 sehingga motor berputar berlawanan arah (cw). Setelah limit switch kedua
tersentuh (pin 5 pada J1) atau tertekan akibat putaran motor yang berlawanan arah tadi, maka
RL6 akan aktif yang menyebabkan semua relay nonaktif.
Selain sebagai pengendali putaran motor pakan dan daur ulang, terdapat juga rangkaian
relay sebagai pengendali putaran motor pembuangan pakan. Gambar 4.4 di bawah merupakan
gabar rangkaianrelaysebagai pengendali putaran motor pembuangan pakan.
Gambar 4.4 RangkaianRelayPembuangan Pakan
Mikro memberi masukan sehingga RL1 aktif. Setelah RL1 aktif secara otomatis RL2
akan aktif, maka motorpun akan aktif dan berputar (pintu pembuangan terbuka). Setelah pintu
pembuangan tertutup dan mengenailimit switch, maka RL3 akan aktif dan mematikan motor.
4.1.2 Pengujian Motor Makan
Pengujian in dilakukan dengan menggunakan picuan pada masukan motor. Motor makan
akan aktif dan pembuka pintu pakan sampai menyentuh limit switch dan akan berputar
berlawanav arah sehingga pintu akan menutup kembali. Salam penutup pintu pakan digunakan
relay. Relay ini berfungsi sebagai pembalik putaran motor DC. Pengambilan data motor makan dapat dilihat pada tabel 4.1 di bawah ini:
Tabel 4.1 Banyaknya pakan yang diberi
Input Trigger
Pengambilan data
ke-(gram) Rata-rata
1 2 3
L 1 134 137 130 133,667
M 2 228 230 260 239,333
H 3 373 381 272 375,333
Pada pengambilan data pada pengujian motor pakantriggeryang diberikan sesuai dengan
input yang dimasukkan. Adanya perbedaan hasil pada masukan dua kali trigger yang diberikan terjadi dikarenakan perbedaan besar – kecilnya pakan (pelet). Seperti yang kita ketahui bahwa
pellet (pakan hamster) memiliki ukuran berbeda tiap butirnya.
Gambar 4.3 di bawah ini merupakan gambar pengisian pakan dalam kandang yang dilakukan
oleh motor makan.
a. Saat pintu pakan tertutup b. Saat pintu pakan terbuka
Gambar 4.3 Gambar buka tutup pintu pakan
Dalam pembuatan pengisian pakan kandang hamster ini terdapat perubahan dalam
jalur pengisian pakan (dimana jalur pembuangan makanan baru dan daur ulang dijadikan satu),
sedangkan pad perancangan terdapat 2 (dua) buah jalur pengisian yaitu jalur pengisian makan
baru dan jalur pengisian makan daur ulang. Penggabungan ini dilakukan dikarenakan 2 (dua)
faktor, yaitu:
a. Tidak efektif. Dalam pengisian kembali pakan setelah sensor membaca ada makanan
dalam kandang maka banyak makanan yang akan diberikan oleh pakan baru tidak dapat
ditentukan dikarenakan jumlah makanan sisa tidak diketahui banyaknya.
b. Penghematanportpada mikrokontroler.
4.1.3 Pengujian Motor Pembuangan Pakan
Untuk dapat mengetahui keberhasilan kinerja motor pembuangan pakan dilakukan 3
(tiga) kali percobaan. Tabel 4.2 merupakan tabel pengambilan data pada 3 (tiga) kali percobaan.
Table 4.2 Keberhasilan pembuangan pakan
Percobaan Keberhasilan
1 Ya
2 Ya
3 Ya
Pada data di atas dapat dilihat bahwa motor bekerja dengan baik untuk membuka dan
menutup pintu pembuangan pakan pada alas kandang. Makanan sisa yang terbuang berhasil
dibuang keseluruhannya. Gambar 4.4 di bawah ini menunjukan gambar pembuangan pakan dari
Gambar 4.4 Pembuangan pakan
Dalam perancangan motor diletakkan di dalam kandang, sedangkan dalam implementasi
alat tersebut motor diletakkan di luar kandang. Jika motor yang digunakkan berada di dalam
kandang akan mudah dirusak oleh hamster.
4.1.4 Pengujian Motor Daur Ulang
Gambar 4.5 merupakan gambar motor daur ulang dalam mengangkat makanan yang
didaur ulang, sedangkan gambar 4.6 merupakan gambar saat makanan dituangkan pada wadah
penampung. Pada pengujian motor daur ulang ini dilakukan 3 (tiga) kali pengujian. Data-data
pengujian dapat dilihat pada tabel 4.3 di bawah ini.
Tabel 4.3 Data Hasil Pengujian Kinerja Mtor Daur Ulang
Percobaan Trigger Jumlah makanan
yang dibuang
Jumlah sisa
(gram)
1 1 Sisa 133
2 1 Sisa 134
3 1 Sisa 130
4 1 Sisa 133
5 1 Sisa 133
Sama halnya pada pengambilan data pada motor pembuangan pakan, pada pengujian
motor daur ulang ini berhasil dilakukan. Adapun penyebab sisa makanan yang tidak dapat
sepenuhnya dituangkan pada wadah penampung disebabkan oleh kurang tingginya posisi wadah
pembuangan (wadah daur ulang) saat menuagkan sisa makanan ke dalam wadah penampung
makanan. Pada gambar 4.6 dapat kita lihat wadah daur ulang (nomor 1) pada saat akan
menuangkan makanan sisa pada wadah penampung makanan (nomor 2) tidak memiliki cukup
kemiringan untuk menuangkan sisa makanan. Untuk dapat mengetahui lebih jelas kemiringan
yang dimungkinkan, dapat dilihat pada table 4.4. Gambar 4.7 merupakan gambar sudut
kemiringan yang dimungkinkan. Kemiringan diukur dari tiang penyangga (nomor 4) sebagai
vertikalnya dan wadah penampung (nomor 2) sebagai horisontalnya.
Gambar 4.7 Sudut Kemiringan (α)
Table 4.4 Keberhasilan Daur Ulang
Percobaan Sudut kemiringan /α
(drajat)
Sisa makanan
(gram)
Keberhasilan
(%)
1 90 133 0
2 115 59,62 44,83
3 130 0 100
Pada tabel keberhasilan daur ulang di atas dapat kita lihat bahwa kemiringan yang dapat
dimingkinkan untuk menuangkan makanan sisa dalam wadah penampung makanan adalah 130°.
Untuk pengaplikasiannya tidak dapat dilakukan dikarenakan pada sudut ini plant yang telah
dibuat akan berubah. Jika tiang penyangga dinaikkan, maka posisi wadah daur ulang akan lebih
tinggi daripada jalur daur ulangnya. Hal ini akan menyebabkan makanan sisa tidak dapat dibuang
ke dalam wadah daur ulang dan akhirnya jatuh ke luar kadang.Sama halnya dengan struktur
pembuangan pakan, pada struktur daur ulang ini terjadi perubahan. Perubahan pembuatan sistem
pengangkatan pakan dari wadah pembuangan sampai ke wadah penampung pakan terjadi karena
adanya kegagalan pembuatan pengangkat pakan. Pada pengangkatan menggunakan fan,
pendorongan pakan tidak dapat mencapai ketinggian 20cm. Jarak antara wadah pembuangan
4.1.5 Pengujian Sensor
Dalam pengujian rangkaian sensor makanan, alat ukur yang digunakan untuk mengukur
besaran tegangan adalah multimeter digital. Hal ini dilakukan untuk mengetahui apakah
rangkaian sensor makanan dapat menghasilkan tegangan sesuai yang diharapkan, yaitu sebesar
3,65 V untuk tegangan referensi, keluaran komparator bernilai Vcc (5 V) untuk kondisi terhalang
atau kondisi di mana terdapat makanan di antara inframerah dan photodioda (logika tinggi) dan
ground (0 V) saat tidak terhalang atau kondisi dimana photodioda menerima sinyal inframerah secara langsung tanpa ada benda lain yang menghalangi (logika rendah). Gambar 4.8 merupakan
gambar rangkaian yang sudah dibuat (hardware)
Gambar 4.8HardwareRangkaian Sensor Makanan
Dari hasil pengukuran didapat nilai tegangan referensi yang dihasilkan yaitu 3,65 V,
besar tegangan keluaran komparator saat sensor makan terhalang adalah 3,5 V, besar tegangan
keluaran komparator saat saat tidak terhalang adalah 0 V, dengan tegangan Vcc terukur 4,89 V.
Dari hasil pengukuran tersebut didapat data perbandingan dengan hasil perancangan seperti pada
tabel 4.5.
Tabel 4.5 Data Perbandingan Hasil Pengukuran dengan Hasil perancangan Sensor Makanan
Titik Ukur Hasil Pengukuran Hasil Perancangan % Error
Tegangan Referensi 3,71 V 3,75 V 1,07 %
Keluaran komparatorhigh 3,5 V 3,5 V 0 %
Keluaran komparatorLow 0 V 0 V 0 %
Vcc 4,89 V 5 V 2,2 %
Tegangan saat logika tinggi kurang dari tegangan logika tinggi pada umumnya (5 V). Hal
ini tidak menjadi masalah bagi keberhasilan alat, karena mikrokontroller masih bisa membaca
4.2 Pembahasan
Softwar
Dalam pengujian soft
kinerja masing-masing. Dalam
1. PengujianTime
2. PengujianTrig
3. Pengujian Peng
Pada pembuatan soft
perubahan hardware. Perubah
makanan dalam kandang, peng
dapat dilihat pada gambar 4.9
ware
oftware ini digunakan pembagian percobaan lam hal ini mencangkup antara lain:
imer gger
ngakifan Motor
oftware ini terdapat juga perubahan yang bahan tersebut mencakupi pengecekkan senso
engaktifan motor pakan dalam pengisian pakan
yang merupakanflowchartprogram yang tela
an menurut fungsi dan
ng disesuaikan dengan
nsor akan ada tidaknya
an. Untuk lebih jelasnya
Gambar 4.7 Diagram Alir
Pada awalnya input (L
makanan di dalam kandang a
motor makan akan diaktifkan
trigger untuk M, dan 3 trigge
berlalu maka sensor akan aktif
Jika terdapat makanan maka m
wadah daur ulang untuk di ang
aktif dan member makanan ke
4.2.1 Pembahasan
Timer
Timer ini digunakan u akan aktif dan mencacah hin
3600000 ms akan bertambah
maka pengaturan milidetik aka
bertambah 1 (satu) dan jam
mingguannya. Pada pegaturan
(tujuh). Setelah hari mencapai
(satu). Di bawah ini akan ditun
lir Perangkat Lunak Otomatisasi Sistem Pakan
(L, M, H) diberikan. Sensor akan diaktifkan
g ataukah tidak. Jika tidak terdapat makanan
an sesuai dengan input yang telah diberikan
gger untuk H). Timer akan berjalan selama 12
ktif kembali dan mendeteksi ada atau tidak mak
a motor pembuangan akan aktif dan membuan
angkat kembali. Jika tidak terdapat makanan ma
kembali.
er
n untuk menentukan pewaktuan pada otomasi
hingga mencapai 3600000 (dalam milidetik
ah 1 (satu) dan akan dideteksi sebagai jam. Se
akan di 0 (nolkan). Jika jam itu mencapai jumla
jam dinolkan kembali. Sama halnya deng
an penentuan mingguannya, hari akan bertamb
pai jumlah sama dengan 7 (tujuh), maka ming
itunjukan penggalan program untuk pengaktifan
an Hamster Terbaru
kan dan mendeteksi ada
n dalam kandang maka
n (1 trigger untuk L, 2 12 jam. Setelah 12 jam
akanan dalam kandang.
uang makanan ke dalam
maka motor makan akan
asi sistem pakan. Timer
etik). Setelah mencapai
Setelah jam bertambah,
mlah 24, maka hari akan
ngan pengaturan pada
mbah hingga mencapai 7
inggu akan bertambah 1
'---interupsiTimer1
Timer_1_int:
Milidetik = Milidetik + 1
If Milidetik = 3600000 Then
Jam = Jam + 1
Milidetik = 0
End If
If Jam = 24 Then
Hari = Hari + 1
Jam = 0
End If
If Hari = 7 Then
Minggu = 1
Hari = 0
End If
Return
Timer akan terus berjalan sampai mencapai 3600000. Setelah mencapa angka 3600000
maka angka akan mengulang kembali menjadi 0 (nol) dan mencacah kembali. Di bawah ini akan
ditampilkan tabel timer yang telah dibuat yang disesuaikan dengan waktu pada kenyataannya.
Tabael 4.6 Perbandingan Timer dengan Waktu Normal
Timer (s) Waktu Normal (s)
1 8
60 480
120 965
Dari data yang telah didapat di atas dapat dilihat perbedaan waktu yang besar, sehingga
timer tidak dapat bekerja seperti yang diinginkan. Untuk perbedaan ketiga pada tabel di atas di
sebabkan karena adanya pergeseran waktu yang disebabkan oleh perhitungan dalam mikro.
4.2.2 Subrutin Penampil LCD
Gambar 4.8 Gambar tampilan LCD
Seperti yang telah dijelaskan pada bab III (perancangan) sebelumnya, bahwa LCD disini
digunakan sebagai penampil (gambar 4.8). Dibawah ini peggalan program untuk penampil LCD.
'---tampilan lcd
Sub Penampil()
Cls
Locate 1 , 1
Lcd "jum_mkn= "
If Pilihpakandikit = 1 Then
Lcd "dikit"
Elseif Pilihpakansedang = 1 Then
Lcd "sedang"
Else
Lcd "banyak"
End If
End Sub
4.2.3 Pembahasan Otomatisasi Pakan
Dalam otomasasi sistem pakan ini sensor pakan akan digunakan sebagai input. Jika
sensor pakan bernilai 1 (satu), maka motor pembuangan akan bernilai 1 (satu). Motor
pembuangan akan membukan alas bawah kandang (pintu pembuangan pakan). Setelah alas
bawah kandang tertutup (motor pembuangan bernilai 0 atau off), maka motor daur ulang akan
aktif dan mengangkat pakan pakan sampai menuangkan pakan pada wadah penampung seperti
untuk menurunkan wadah pembuangan pakan ke keadaan semula. Berikut ini adalah penggalan
program pada subrutin otomatisasi sistem pakan.
'---otomatisasi makanan
Sub Pakan()
Delaypakan = Pilihpakandikit +(2 * Pilihpakansedang) +(3 * Pilihpakanbanyak)
For A = 1 To Delaypakan
If Sensorpakan = 1 Then
Pengisipakan = 1
Waitms 10
Pengisipakan = 0
Else
Pembukapakan = 1
Waitms 10
Pembukapakan = 0
Waitms 1000
Pengangkatpakan = 1
Waitms 10
Pengangkatpakan = 0
Waitms 10000
Pengisipakan = 1
Waitms 10
Pengisipakan = 0
End If
Next A
BAB V
KESIMPULAN DAN SARAN
5.1
Kesimpulan
Berdasarkan hasil pengamatan terhadap hasil rancangan otomatisasi sistem pakan
hamster, diambil beberapa kesimpulan antara lain:
a. Alat tidak berhasil dibuat. Hal ini dikarenakan alat tidak berjalan dengan yang
diharapkan.
b. Penentuan banyak pakan tidak dapat bekerja.
c. Timer tidak berjalan semestinya sesuai dengan keadaan normal (nyatanya).
5.2
Saran
Dengan mengacu pada kekurangan yang dimiliki oleh otomatisasi sistem pakan hamster
ini, disarankan kepada rekan yang lain jika akan merancang alat sejenis maupun lainnya :
a. Perlunya dipertimbangkan lagi nilai ambang yang masuk maupun yang keluar dari
mikrokontroler.
b. Pembuatan program pada mikrokontroler akan lebih baik apabila menggunakan bahasa
pemrograman yang lebih tinggi.
49
[1] Wardhana, L., 2006, Mikrokontroler AVR ATMega8535, Penerbit Andi, Yogyakarta.
[2] http://www.discovercircuits.com/H/hbridge.htm
[3] http://www.alldatasheet.com
[4]
http://optical-components.globalspec.com/SpecSearch/Suppliers?QID=12397578&Comp=1028&nr
=1&RegEvent=new(waktu akses 20/11/09)
[5] Joseph A. Edminister. M.S.T., Ir. Sahat Pakpahan,Teori dan Soal – Soal Rangkaian
Listrik, Edisi Keempat, Erlangga.
[6] Malvino, Albert Paul, Ph.D., 1994, Prinsip – Prinsip Elektronika. Penerjemah:
Prof.M. Barmawi, Ph.D., Jakarta: Penerbit Erlangga
[7] Hawkes. Nigel, 1986, Robot dan Otomasi Industri, Grolier Internasional, INC - PT
Widyadara
[8] http://en.wikipedia.org/wiki/LCD.
[9] http://www.wikipedia.org/hayescommand-set.html
$regfile = "m8535.dat"
$crystal = 8000000
5536 - 1000
Dim Milidetik As Long
Defbit Minggu
Defbyte Jam
Defbyte Hari
Defbyte Delaypakan
Defbyte A
Defword Adcsuhu
Milidetik = 0
Jam = 0
Hari = 0
Minggu = 0
Pakanaktif = 0
Pasiraktif = 0
Unreborn = 0
Lcd1 Alias Portc.0
Lcd2 Alias Portc.1
Lcd5 Alias Portc.4
Lcd6 Alias Portc.5
Pembukapasir Alias Portb.0
Pembukaserbuk Alias Portb.1
Pembukapakan Alias Portb.2
Pengisipasir Alias Portb.3
Pengisiserbuk Alias Portb.4
Pengisipakan Alias Portb.5
Pengangkatpakan Alias Portb.6
Pilihpakandikit Alias Porta.7
Pilihpakansedang Alias Porta.6
Pilihpakanbesar Alias Porta.5
Pembaliksuhu Alias Porta.4
Pwmsuhu Alias Porta.3
Opampsensor Alias Porta.2
Sensorpakan Alias Porta.1
Config Pilihpakandikit = Input
Config Pilihpakansedang = Input
Config Pilihpakanbesar = Input
Config Pembaliksuhu = Output
Config Sensorpakan = Input
Config Lcd = 16 * 2
Config Lcdpin = Pin , E = Lcd1 , Rs = Lcd2 , Db4 = Lcd3 , Db5 = Lcd4 , Db6 = Lcd5 , Db7 = Lcd6
Config Timer1 = Timer , Prescale = 8
Config Adc = Single , Prescaler = Auto , Reference = Avcc
Enable Adc
Enable Timer1
Enable Interrupts
!IN R16,MCUCSR
!ORI R16,&H80
!OUT MCUCSR,R16
!OUT MCUCSR,R16
On Timer1 Timer_1_int <