Abstrak - Kendaraan merupakan sarana transportasi darat yang bermanfaat sekali dalam kehidupan sehari-hari terutama pekerjaan yang menuntut mobilitas. Namun minimnya sistem peringatan dan pengawasan terhadap pengendara seringkali menjadikan kendaraan sebagai mesin pembunuh. Pada jurnal berjudul “Aplikasi Mikrokontroller AT89C51 pada Pengukur Kecepatan” yang disusun oleh Pamungkas Daud dirancang sistem pengukur kecepatan kendaraan menggunakan Light Dependent Resistor (LDR) sebagai sensor. Sistem tersebut hanya mengukur kecepatan kendaraan pada suatu titik lokasi dan tidak dilengkapi fasilitas penyimpanan data kecepatan kendaraan Oleh karena itu diperlukan suatu sistem monitoring kecepatan kendaraan secara real time untuk menekan angka kecelakaan yang diakibatkan pengendara yang mengebut. Data posisi dan kecepatan GPS yang terpasang pada kendaraan akan dikirim secara kontinyu ke PC server melalui fasilitas SMS.
Hasil pengujian data kecepatan GPS SkyNav SKM53 memberikan nilai kesalahan terkecil 3,851 km/jam dan kesalahan terbesar 9,089 km/jam. Kesalahan ini dapat diperbaiki dengan mengalikan data kecepatan GPS dengan konstanta 1,1457 yang merupakan gradien grafik perbandingan kecepatan GPS terhadap kecepatan kendaraan sehingga menghasilkan kesalahan terkecil 1,467 km/jam dan kesalahan terbesar 3,173 km/jam. Data monitoring kecepatan berhasil dikirim dengan interval waktu 1 menit melalui SMS dan sistem penerima berhasil menerima data posisi serta kecepatan sehingga dapat dijadikan referensi perilaku pengemudi sehari-hari. Kata kunci - Monitoring, Kecepatan Kendaraan, GPS, SMS.
I.PENDAHULUAN
ndonesia merupakan negara yang memiliki kepadatan penduduk terbesar ke-4 di dunia. Sebagai negara berkembang yang memiliki populasi penduduk cukup padat mengharuskan penduduknya memiliki mobilitas tinggi demi tuntutan pekerjaan ataupun aktivitas sehari-hari. Transportasi darat menjadi salah satu pilihan masyarakat untuk menunjang aktivitas sehari-hari. Namun angka kecelakaan transportasi darat di Indonesia dapat dikatakan tinggi. Data Korlantas Polri pada 2010 mencatat korban tewas akibat kecelakaan lalu lintas di Indonesia berjumlah 31.234
Dony Hendra Lesmana adalah mahasiswa program sarjana Teknik Elektro Universitas Brawijaya, Malang, Indonesia (penulis dapat dihubungi melalui email: [email protected]).
Mochammad Rif’an, ST., MT dan Ir. Nurussa’adah, MT. adalah dosen pengajar program sarjana Teknik Elektro Universitas Brawijaya, Malang, Indonesia (email: [email protected]; [email protected])
jiwa atau 85-86 jiwa terenggut nyawanya setiap hari. 60% korban berada pada usia produktif dan yang lebih memprihatinkan lagi, faktor penyebab terjadinya kecelakaan 90% diakibatkan oleh kelalaian manusia, sementara faktor lainnya seperti kondisi kendaraan, rambu lalu lintas dan infrastruktur jalan hanya 10%.[1]
Indonesia dengan tradisi mudik tiap tahunnya berpotensi menyumbang angka kecelakaan yang cukup tinggi terutama untuk transportasi masal seperti bus. Kendaraan dengan julukan singa jalan raya ini sering berbuat semaunya sehingga membahayakan pengendara lain. Kurangnya pengawasan dan tindakan yang tegas dari pihak kementrian perhubungan membuat sopir berbuat semaunya saat di jalan. Upaya untuk menekan unsafe behaviour sopir sudah dilakukan dengan menempelkan stiker peringatan yang menginstruksikan kepada pengguna jalan maupun penumpang yang merasa keselamatannya terancam akibat ulah sopir bus untuk melapor ke nomor telepon yang tercantum di stiker tersebut. Namun, hal ini sepertinya kurang efisien karena pada kenyataannya banyak yang mengabaikan peringatan ini.
Pesatnya perkembangan industri komunikasi dapat dimanfaatkan untuk sarana pengiriman data. Salah satu fasilitas pengiriman data yang terjangkau dan handal adalah SMS (Short Message Service). Berbagai macam provider telepon seluler berlomba-lomba menyediakan paket yang menarik dan semurah mungkin. Tentu hal ini dapat dimanfaatkan untuk sistem monitoring dengan SMS sebagai media transmisi.
Untuk menekan angka kecelakaan akibat pengendara yang suka melampaui batas kecepatan aman, maka diperlukan pengawasan terhadap pengendara untuk memberikan peringatan. Dengan adanya sistem ini diharapkan pihak terkait dapat mengetahui perilaku pengendara dan memberikan sanksi jika terbukti sering melanggar batas kecepatan aman yang ditetapkan oleh pemerintah ataupun pihak terkait.
II. Sistem Monitoring Kecepatan Kendaraan
Sistem monitoring kecepatan kendaraan dirancang dengan memanfaatkan data posisi dan kecepatan dari GPS. Hasil pembacaan data GPS kemudian ditransmisikan ke PC server melalui fasilitas SMS yang kemudian akan disimpan sebagai track record sehari-hari pengemudi.
A. GPS SkyNav SKM53
GPS (Global Positioning System) adalah sistem satelit navigasi dan penentuan posisi yang dimiliki dan dikembangkan oleh Departemen Pertahanan Amerika Serikat pada tahun 1970. GPS awalnya dirancang untuk keperluan militer, namun seiring berjalannya waktu GPS juga dimanfaatkan untuk keperluan sipil.[2] GPS
RANCANG BANGUN SISTEM MONITORING KECEPATAN
KENDARAAN BERBASIS GPS DENGAN SMS SEBAGAI MEDIA
PENGIRIMAN DATA
Dony Hendra Lesmana, M Rif’an, ST. MT. dan Ir. Nurussa’adah, MT.
Jurnal Dony Hendra Lesmana, Desember 2013 SkyNav SKM53 memberikan data posisi, kecepatan,
waktu, serta ketinggian secara kontinyu dengan akurasi posisi 3 m. Bentuk fisik dari GPS SkyNav SKM53 ditunjukkan dalam Gambar 1.
Gambar 1. Bentuk fisik GPS SkyNav SKM53 Sumber: SkyNav SKM53 Datasheet, 2010: 2
B. Modem Wavecom Fastrack M1306B
Modem Wavecom Fastrack M1306B adalah modul komunikasi seluler GSM yang menggunakan prinsip Plug and Play sehingga tidak memerlukan instalisasi yang rumit untuk dapat menggunakannya. Wavecom Fastrack M1306B juga menyediakan komunikasi data dengan perangkat luar melalui antarmuka serial serta yang dapat diprogram dengan menggunakan perintah-perintah AT Command. Bentuk fisik Wavecom Fastrack M1306B ditunjukkan dalam Gambar 2.
Gambar 2. Bentuk fisik modem Wavecom Fastrack M1306B Sumber: Wavecom, 2006: 1
C. Perintah AT Command untuk SMS
AT-Command merupakan standar command yang digunakan oleh komputer untuk berkomunikasi dengan modem/phone modem. AT berasal dari kata Attention. Dengan menggunakan AT-command, dapat diperoleh informasi mengenai modem, melakukan setting pada modem, mengirim SMS dan menerima SMS (untuk GSM modem), dan sebagainya.[3] Tabel 1 menunjukkan beberapa contoh perintah AT-Command yang umum digunakan dalam pengiriman dan penerimaan sms. Tabel 1. Perintah-perintah dalam AT-Command
AT Command Keterangan
AT Mengecek apakah handphone telah terhubung AT+CMGF Untuk menetapkan format mode dari terminal AT+CSCS Menetapkan jenis encoding
AT+CNMI Untuk mendeteksi pesan SMS baru masuk secara otomatis
AT+CMGL Membuka daftar SMS yang ada pada SIM Card
AT+CMGS Mengirim pesan SMS AT+CMGR Membaca pesan SMS AT+CMGD Menghapus pasan SMS
Sumber: Cahyo Rossy W, 2006:157
Setelah mengirim perintah kepada modem GSM, maka modem akan memberikan respon sebagai indikator bahwa perintah kita telah berhasil atau tidak dieksekusi. Tabel 2 menunjukkan balasan respon modem setelah diberikan perintah.[4]
Tabel 2. Respon Komunikasi Data
Respon Keterangan
OK Command execute, no error RING Ring detected
NO CARRIER Link not established or disconnected ERROR Invalid command or command line too long NO DIALTONE No dial tone, dialing impossible, wrong
mode
BUSY Remote station busy Sumber: Judis Priastono, 2011: 18
D. Sistem Minimum ATMega162
Sistem minimum merupakan suatu rangkaian minimum agar IC mikrokontroler dapat bekerja. ATMega162 merupakan seri mikrokontroler CMOS 8-bit buatan Atmel berbasis arsitektur RISC (Reduced Instruction Set Computer). Hampir semua instruksi dieksekusi dalam satu siklus clock. Pin Layout Mikrokontroler ATMega162 ditunjukkan dalam Gambar 3.
Gambar 3. Pin Layout ATMega162 Sumber: Atmel, 2013: 2
Terdapat 3 bagian penting dalam sistem minimum ATmega162, yaitu:
1) Catu Daya
Catu daya adalah sumber power/ tegangan yang akan menghidupkan system minimum ini. Catu daya yang dibutuhkan oleh system minimum ini sebesar 4,75 - 5V.
2) Clock/ Crystal
Clock / Cristal merupakan hal yang sangat perting juga dalam rangkaian sistem minimum karena bagian ini yang berfungsi memberikan clock untuk berjalannya transfer data.
3) Reset
Rangkaian reset berfungsi sebagai interrupt untuk set ke program awal. Ketika pin ini diaktifkan maka program akan berjalan lagi dimulai dari awal.
E. Komunikasi Serial
Komunikasi serial merupakan metode pengiriman data dimana data dikirim satu per satu sehingga hanya memerlukan sedikit pengkabelan dan memiliki jangkauan transmisi data cukup jauh. Terdapat 2 jenis komunikasi serial yaitu synchronous dan asynchronous Komunikasi serial synchronous memerlukan clock synchronization agar pengiriman atau penerimaan data dapat berjalan. Sedangkan pada komunikasi serial asynchronous menggunakan start bit dan stop bit untuk sinkronisasi data.
F. Borland Delphi 7
Borland Delphi merupakan Pemrograman Generasi IV yang memiliki kelebihan berupa tampilan visual yang user-friendly. Borland Delphi dikembangkan dengan
menggunakan konsep Object Oriented Programming (OOP), yaitu pemrogram memilih objek apa yang ingin dimasukkan ke dalam Form/Window, lalu tingkah laku objek tersebut saat menerima event/aksi akan dilakukan sesuai dengan program yang telah dibuat.[5]
III. METODOLOGI
Penyusunan skripsi ini didasarkan pada masalah yang bersifat aplikatif. Untuk menyelesaikan rumusan masalah dan merealisasikan tujuan penelitian yang terdapat pada pendahuluan maka diperlukan metode untuk menyelesaikan masalah tersebut.
A. Diagram Blok Sistem
Diagram blok perancangan hardware sistem secara keseluruhan ditunjukkan dalam Gambar 4.
Gambar 4: Blok Diagram Sistem
B. Spesifikasi Alat
Spesifikasi dari sistem yang dirancang adalah 1) Sistem menggunakan catu daya baterai 12V. 2) Batas aman kecepatan kendaraan dapat diatur. 3) Range kecepatan yang dipantau antara 0 hingga
120 Km/Jam dan sirine akan terpicu jika kecepatan melebihi batas aman sebagai indikator mengebut. 4) Sistem monitoring adalah real-time, pengirim akan
mengirim data setiap memperoleh data GPS. 5) Data yang disimpan pada database hanyalah posisi
kendaraan dalam lintang bujur dan kecepatan kendaraan dalam format excel.
6) GPS yang digunakan adalah GPS Skylab SKM53 dengan akurasi minimal 3m.
7) Mikrokontroler yang digunakan adalah ATMega162.
8) Modem GSM yang digunakan adalah Wavecom Fastrack M1306b.
IV.PERANCANGANDANPEMBUATANALAT
A. Perancangan Rangkaian Sumber Tegangan DC 5V
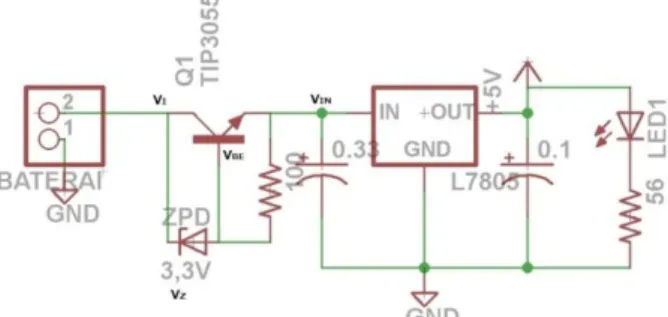
Rangkaian sumber tegangan DC 5 V digunakan sebagai sumber tegangan bagi GPS, mikrokontroler ATMega162 dan LCD 16x2 karakter. Rangkaian sumber tegangan DC 5V ditunjukkan dalam Gambar 5.
Gambar 5: Rangkaian sumber tegangan DC 5V Sumber: ST Electronics, 2012: 31
B. Perancangan Antarmuka MAX232
Agar mikrokontroler dan modem GSM dapat saling berkomunikasi maka diperlukan rangkaian antarmuka untuk mengubah level tegangan serial ke TTL atau sebaliknya. Skematik rangkaian antarmuka MAX232 ditunjukkan dalam gambar 6.
Gambar 6: Rangkaian antarmuka MAX232 Sumber: Maxim Integrated, 2010: 17
C. Perancangan Minimum Sistem Mikrokontroller ATMega162
Mikrokontroller sebagai unit pemroses data berfungsi untuk melakukan akuisisi data GPS, menampilkan data ke display LCD serta melakukan kontrol penuh terhadap transmisi data yang dilakukan via SMS. ATMega162 memiliki 2 fitur UART (Universal Asynchronous Receiver Transmitter). Fitur inilah yang digunakan mikrokontroler untuk mengakses GPS dan modem GSM. Skematik dari sistem minimum ATMega162 ditunjukkan dalam Gambar 7.
Jurnal Dony Hendra Lesmana, Desember 2013
D. Perancangan Driver Sirine
Mikrokontroler bekerja pada level tegangan TTL yaitu 5V, sedangkan sirine membutuhkan tegangan 12V. Rangkaian ini berfungsi mengintegrasikan sirine dengan mikrokontroler. Skematik dari rangkaian driver ditunjukkan dalam gambar 7.
Gambar 7. Rangkaian Driver Relay
E. Perancangan Perangkat Lunak Blok Sistem Pengirim
Blok sistem pengirim mempunyai dua tugas utama yaitu pemilahan data GPS dan pengiriman data melalui SMS ke sistem penerima yaitu PC server. Gambar 8 menunjukkan diagram alir program sistem pengirim.
Gambar 8. Diagram Alir Blok Sistem Pengirim
F. Perancangan Perangkat Lunak Parsing Data GPS
Pemilahan (parsing) data GPS ditujukan untuk mengambil data yang kita inginkan dari GPS. Algoritma pemilahan data GPS untuk header ‘$GPRMC’ dijelaskan dalam gambar 9.
Gambar 9. Algoritma Pemilahan Data GPS
G. Perancangan Algoritma Pengiriman SMS
Algoritma pengiriman SMS dirancang agar sistem mampu mentransmisikan data dengan jangkauan yang jauh. Pengiriman SMS melalui modem dapat dilakukan dengan memberikan perintah AT-Command pada modem sesuai datasheet seperti yang dtunjukkan dalam Gambar 10.
Gambar 10. Algoritma Kirim SMS melalui Modem
H. Perancangan Perangkat Lunak Blok Sistem Penerima
Blok sistem penerima bertugas menerima data SMS dan mengolahnya untuk ditampilkan ke grafik dan kemudian disimpan dalam excel. Diagram alir program sistem penerima ditunjukkan dalam Gambar 11.
Gambar 11. Diagram Alir Blok Sistem Penerima
V.PENGUJIANDANANALISISDATA
A. Pengujian Akurasi Posisi GPS
Pengujian dilakukan pada malam hari dengan mencatat koordinat bumi dari GPS pada tempat yang terlihat mencolok di google maps seperti di sudut jalan kemudian memasukkan data koordinat tersebut ke google maps. Data akurasi GPS SkyNav SKM53 ditunjukkan dalam Tabel 3.
Tabel 3: Data Akurasi Posisi GPS
No. Lokasi Pengujian Rata-Rata Kesalahan (m)
1 Bawah Pohon 11,4
2 Lapangan Rektorat
UB 3,32
3 Dalam Rumah 7,66
Kesalahan rata-rata posisi GPS diakibatkan pantulan sinyal GPS oleh keadaan sekitar (multipath error). Hasil pengujian pada lokasi terbuka memberikan hasil lebih akurat.
B. Pengujian Data Kecepatan GPS
Pengujian dilakukan dengan membandingkan hasil data kecepatan GPS yang ditampilkan pada LCD terhadap kendaraan. Kendaraan yang digunakan adalah Sepeda Motor Jupiter Z tahun 2010. Data perbandingan kecepatan GPS dengan kendaraan bermotor ditunjukkan dalam Tabel 3 dan Grafik 1.
Persamaan garis lurus untuk kecepatan sistem adalah: Vkendaraan = 1,1457 VGPS
Pengujian data kecepatan untuk yang kedua kalinya melibatkan perhitungan persamaan grafik memberikan data lebih baik. Hasil pengujian kedua ditunjukkan dalam Tabel 5.
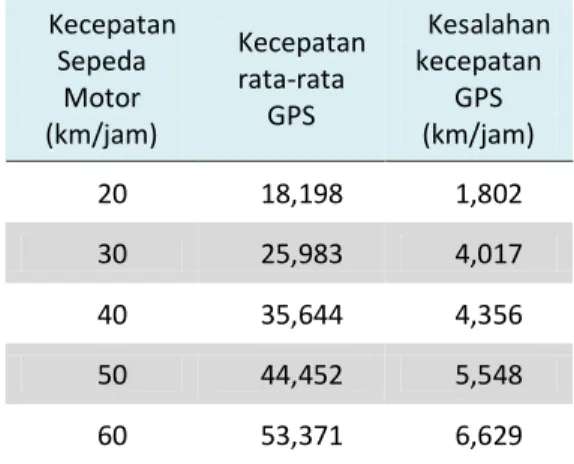
Tabel 4. Perbandingan Data Kecepatan Motor terhadap GPS
Kecepatan Sepeda Motor (km/jam) Kecepatan rata-rata GPS Kesalahan kecepatan GPS (km/jam) 20 18,198 1,802 30 25,983 4,017 40 35,644 4,356 50 44,452 5,548 60 53,371 6,629
Grafik 1. Perbandingan Kecepatan Kendaraan terhadap GPS
Tabel 5. Perbandingan Data Kecepatan Motor terhadap Sistem
Kecepatan Sepeda Motor (km/jam) Kecepatan rata-rata Sistem Kesalahan kecepatan Sistem (km/jam) 20 21,316 1,316 30 30,716 0,716 40 39,220 0,780 50 51,493 1,493 60 61,189 1,189
Hasil pengujian kedua menunjukkan hasil lebih baik dibanding pengujian pertama dengan kesalahan terkecil kecepatan sistem adalah 0,716 km/jam dan kesalahan terbesar sistem adalah 1,493 km/jam.
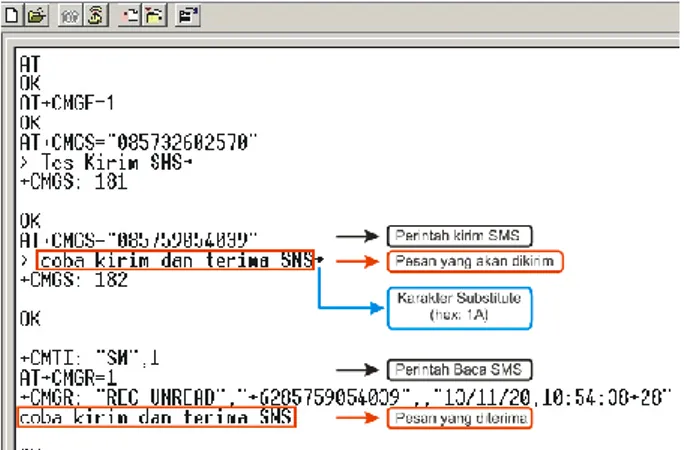
C. Pengujian Kirim dan Baca SMS Modem Wavecom M1306b
Pengujian modem GSM bertujuan untuk mengetahui apakah modem GSM bekerja dengan baik. Pengujian dilakukan dengan melakukan perintah kirim (AT+CMGS) dan baca (AT+CMGR) SMS melalui hyperterminal yang dikirim kembali ke modem GSM. Pengujian dilakukan dengan baud rate 115200 bps (bit per second), 8 data, 1 stop, no parity sesuai dengan datasheet modem Wavecom. Hasil pengujian kirim SMS menggunakan modem Wavecom ditunjukkan dalam Gambar 12. 0 10 20 30 40 50 60 70 18.457 25.983 35.644 44.452 53.371 K e ce p ata n Sep e d a Mo to r (k m /j am ) Kecepatan GPS (km/jam)
Grafik Perbandingan Kecepatan GPS terhadap Kecepatan Sepeda Motor
Jurnal Dony Hendra Lesmana, Desember 2013 Gambar 12. Pengujian Modem Wavecom melalui Hyperterminal.
Berdasarkan hasil pengujian perintah kirim dan baca SMS menggunakan modem GSM dapat diketahui bahwa modem GSM sukses mengirim dan membaca SMS dengan isi pesan SMS yang yang saling bersesuaian.
D. Pengujian Keseluruhan Sistem
Pengujian keseluruhan sistem terbagi menjadi dua tahap pengujian, yaitu pengujian penyalaan sirine terhadap perubahan kecepatan dan pengujian tampilan PC server. Pengujian penyalaan sirine dilakukan dengan nilai batas penyalaan adalah 35 km/jam. Hasil pengujian penyalaan sirine ditunjukkan dalam Tabel 5.
Tabel 6. Hasil Pengujian Sirine.
No. Data Kecepatan (km/jam) Kondisi Sirine
1 34,725 Padam 2 42,948 Nyala 3 41,151 Nyala 4 38,299 Nyala 5 29,836 Padam 6 19,928 Padam
Hasil pengujian tampilan pada sistem penerima ditunjukkan dalam Gambar 11.
Gambar 11: Tampilan pada PC Server.
Berdasarkan hasil pengujian keseluruhan sistem, sirine berhasil menyala saat melebihi batas kecepatan yang telah ditentukan dan server telah berhasil membaca dan memilah isi pesan SMS yang berisi data posisi dan kecepatan dan menampilkannya dalam bentuk grafik pada jendela aplikasi. Data kecepatan yang berhasil diterima sistem penerima kemudian dapat disimpan ke dalam format Excel, sehingga dapat dijadikan referensi kecepatan kendaraan.
VI. Kesimpulan dan Saran A. Kesimpulan
Berdasarkan hasil perancangan dan pengujian yang telah dilakukan, dapat ditarik kesimpulan sebagai berikut :
1) Data kecepatan GPS SkyNav SKM53 didapatkan dari header $GPRMC melalui komunikasi serial dengan baud rate 9600 bps (bit per second), 8 data, 1 stop, no parity. Kesalahan kecepatan GPS dapat diperbaiki dengan mengalikan data kecepatan GPS dengan konstanta yang diperoleh dari gradien grafik perbandingan kecepatan GPS terhadap kecepatan kendaraan menghasilkan kesalahan terkecil 1,467 km/jam dan kesalahan terbesar 3,173 km/jam.
2) Mikrokontroler ATMega162 dapat melakukan komunikasi dengan modem GSM melalui rangkaian antarmuka MAX232 dengan baud rate 115200 bps (bit per second), 8 data, 1 stop, no parity.
3) Algoritma pengiriman data posisi dan kecepatan GPS melalui modem GSM berjalan dengan baik menggunakan perintah AT-Command.
4) Sistem penerima berhasil melakukan pembacaan dan pemilahan data SMS yang dikirim oleh sistem pengirim dengan range kecepatan monitoring 0 – 120 km/jam serta dapat menyimpan data tersebut ke dalam format excel.
B. Saran
Saran dalam pengimplementasian maupun peningkatan unjuk kerja sistem ini dapat diuraikan sebagai berikut:
1) Sistem ini dapat diimplementaskan untuk lebih dari 1 kendaraan dengan menambahkan data kendaraan dan identitas pengemudi sehingga sistem database dapat memilah data kecepatan masing-masing pengemudi.
DAFTARPUSTAKA
[1] Anonim. 2013. Data Korlantas Polri, 60% Korban Kecelakaan Usia Produktif.
http://lampost.co/berita/data-korlantas-polri-60-korban-kecelakaan-usia-produktif. Diakses tanggal 5 Oktober 2013.
[2] El-Rabbany, Ahmed. 2002. Introduction to GPS The Global Positioning System. Boston: Artech House, Inc.
[3] Rossy W, Cahyo. 2006. Perancangan dan Implementasi Sistem Informasi Layanan Short Messaging Service (SMS).
[4] Utama, Judis Priastono. 2011. Dual Supply RTU (Remote Telemetry Unit) Pada Sistem Pemantau Banjir Terpusat Menggunakan SMS Sebagai Media Transmisi Data. Skripsi Teknik Elektro Universitas Brawijaya.
[5] Abdilla, Leon Andretti. 2005. Validasi Data Dengan Menggunakan Objek Lookup pada Borland Delphi 7.0.