BAB II
TINJAUAN TEORITIS
2.1 Mikrokontroler ATMega8535
Mikrokontroler merupakan suatu chip cerdas yang menjadi tren dalam pengendalian dan otomatisasi di zaman sekarang. Dengan banyaknya jenis, kapasitas memori dan berbagai fitur mikrokontroler menjadi pilihan dalam aplikasi prosesor mini untuk pengendalian skala kecil. Adapun nilai tambah bagi mikrokontroler adalah terdapatnya memori dan port input/output dalam suatu kemasan IC. Kemampuannya yang programmable, fitur yang lengkap seperti ADC internal, EEPROM internal, port I/O, dan komunikasi serial. Harga yang terjangkau memungkinkan mikrokontroler digunakan pada berbagai sistem elektronik, seperti pada robot, automasi industri, sistem alarm, peralatan telekomunikasi, hingga sistem keamanan[ 2].
Sekarang ini, AVR dapat dikelompokan menjadi 6 kelas, yaitu keluarga ATtiny, keluarga AT90Sxx, keluarga ATmega, keluarga AT90CAN, keluarga AT90PWM, dan AT86RFxx. Pada dasarnya yang membedakan masing-masing kelas adalah memori, peripheral, dan fungsinya, sedangkan dari segi arsitekstur dan instruksi yang digunakan, mereka hampir sama.
2.1.1 Arsitektur ATMega8535
Gambar 1. Arsitektur ATMega8535[ 2]
Dari Gambar 1 dapat dilihat bahwa ATMega8535 memiliki bagian sebagai berikut:
1. Saluran I/O sebanyak 32 buah, yaitu Port A, Port B, Port C, dan
PortD
2. ADC 10 bit sebanyak 8 saluran.
3. Tiga buah Timer/Counter dengan kemampuan pembandingan. 4. CPU yang terdiri atas 32 buah programmable.
5. Watchdog Timer dengan oscillator internal. 6. SRAM sebesar 512 byte.
7. Memori Flash sebesar 8 kb dengan kemampuan Read While Write. 8. Unit interupsi internal dan eksternal.
9. Port antarmuka SPI.
10. EEPROM sebesar 512 byte yang dapat diprogram saat operasi. 11. Antarmuka komparator analog.
12. Port USART untuk komunikasi serial.
Mikrokontroler AVR ATMega8535 merupakan mikrokontroler produksi Atmel dengan 8 Kbyte In-System Programmable-Flash, 512 EEPROM dan 512 Bytes Internal SRAM. AVR ATMega8535 memiliki seluruh fitur yang dimiliki AT90S8535. Selain itu, konfigurasi pin AVR ATMega 8535 juga kompatibel dengan AT90S8535. ATMega8535 memiliki sebuah inti prosesor (processor core) yaitu Central Processing Unit, dimana terjadi proses pengambilan instruksi (fetching) dan komputasi data. Seluruh register umum sebanyak 32 buah terhubung langsung dengan unit ALU(Arithmatic and logic Unit). Terdapat empat buah port masing-masing delapan bit difungsikan sebagai masukan maupun keluaran.
Media penyimpanan program berupa Flash Memory, sedangkan penyimpanan data berupa SRAM (Static Random Access Memory) dan EEPROM (Electrical Erasable Programmable Read Only Memory). Untuk komunikasi data tersedia fasilitas SPI (Serial Peripheral Interface), USART (Universal
Synchronous and Asynchronous serial Receiver and Transmitter), serta TWI
AC (Analog Comparator), 8 kanal 10-bit ADC (Analog to Digital Cnverter), 3 buah Timer/Counter, WDT (Watching Timer), manajememn penghematan daya (Sleep Mode), serta osilator internal 8 MHz. seluruh fitur terhubung ke bus 8 bit. Unit interupsi menyediakan sumber interupsi hingga 21 macam. Sebuah stack
pointer selebar 16 bit dapat digunakan untuk menyimpan data sementara saat
interupsi[ 3].
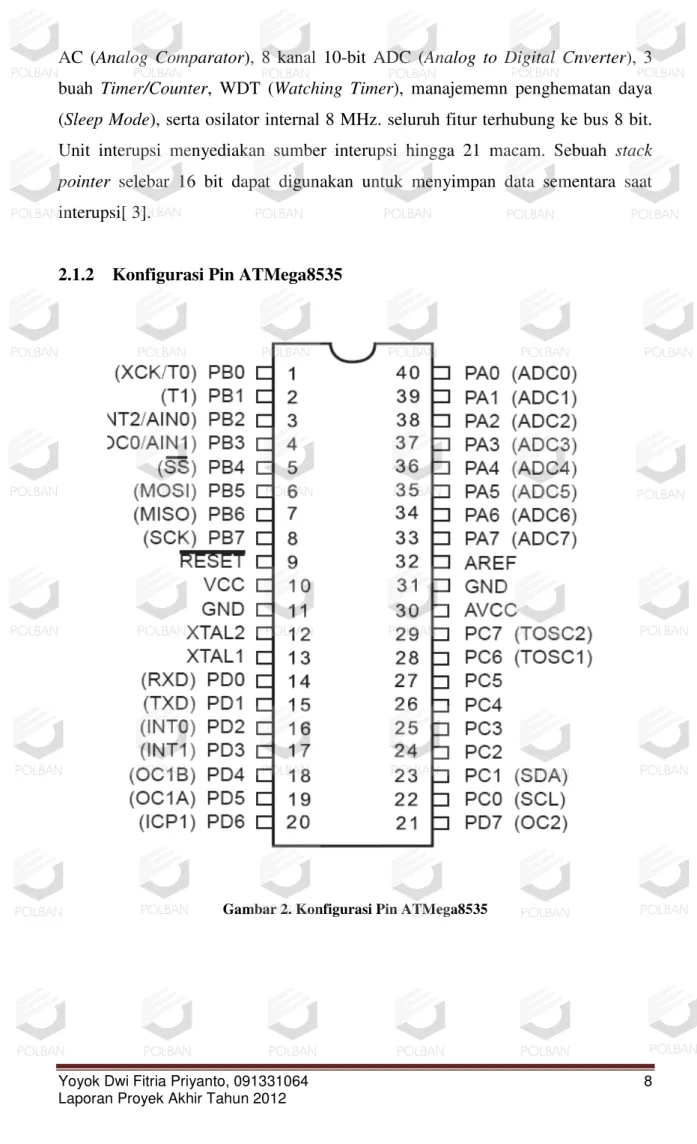
2.1.2 Konfigurasi Pin ATMega8535
Gambar 2. Konfigurasi Pin ATMega8535
Keterangan:
Dilihat pada Gambar 2, ATMega8535 memiliki 40 pin dengan konfigurasi pin sebagai berikut :
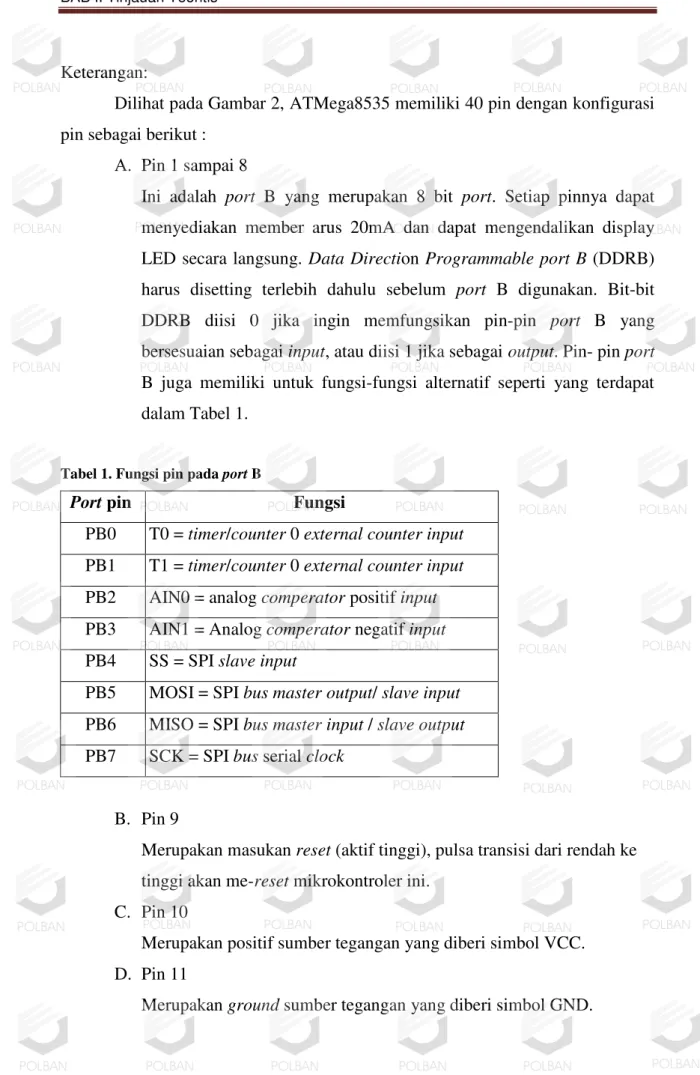
A. Pin 1 sampai 8
Ini adalah port B yang merupakan 8 bit port. Setiap pinnya dapat menyediakan member arus 20mA dan dapat mengendalikan display LED secara langsung. Data Direction Programmable port B (DDRB) harus disetting terlebih dahulu sebelum port B digunakan. Bit-bit DDRB diisi 0 jika ingin memfungsikan pin-pin port B yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Pin- pin port B juga memiliki untuk fungsi-fungsi alternatif seperti yang terdapat dalam Tabel 1.
Tabel 1. Fungsi pin pada port B
Port pin Fungsi
PB0 T0 = timer/counter 0 external counter input PB1 T1 = timer/counter 0 external counter input PB2 AIN0 = analog comperator positif input PB3 AIN1 = Analog comperator negatif input PB4 SS = SPI slave input
PB5 MOSI = SPI bus master output/ slave input PB6 MISO = SPI bus master input / slave output PB7 SCK = SPI bus serial clock
B. Pin 9
Merupakan masukan reset (aktif tinggi), pulsa transisi dari rendah ke tinggi akan me-reset mikrokontroler ini.
C. Pin 10
Merupakan positif sumber tegangan yang diberi simbol VCC. D. Pin 11
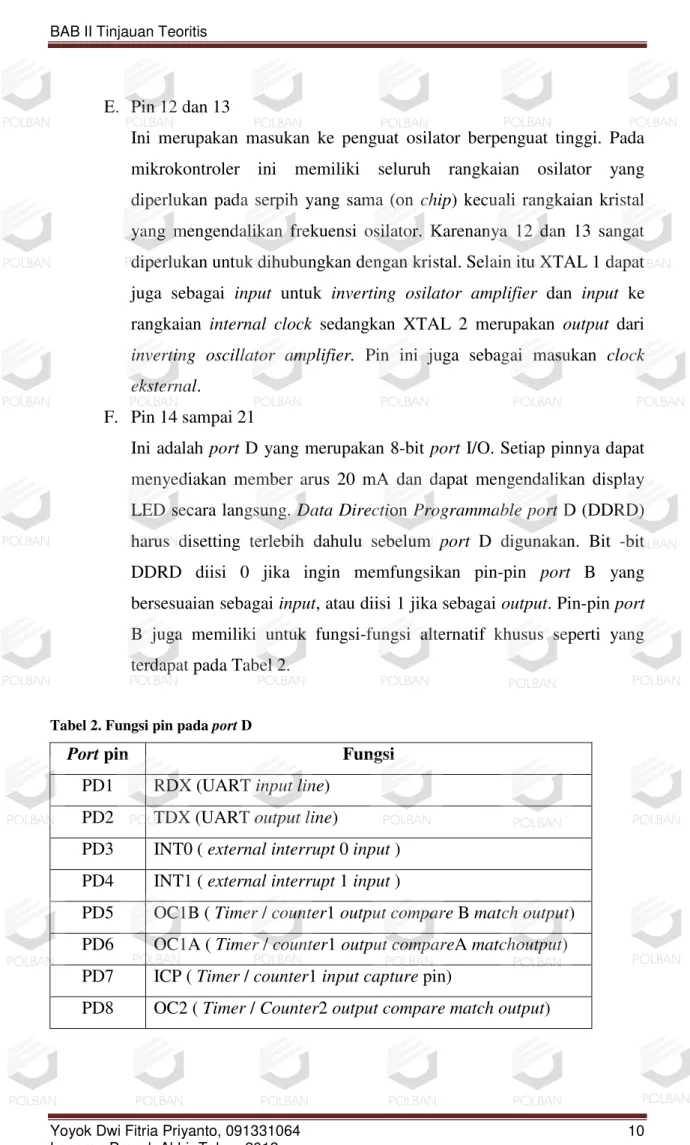
E. Pin 12 dan 13
Ini merupakan masukan ke penguat osilator berpenguat tinggi. Pada mikrokontroler ini memiliki seluruh rangkaian osilator yang diperlukan pada serpih yang sama (on chip) kecuali rangkaian kristal yang mengendalikan frekuensi osilator. Karenanya 12 dan 13 sangat diperlukan untuk dihubungkan dengan kristal. Selain itu XTAL 1 dapat juga sebagai input untuk inverting osilator amplifier dan input ke rangkaian internal clock sedangkan XTAL 2 merupakan output dari
inverting oscillator amplifier. Pin ini juga sebagai masukan clock
eksternal.
F. Pin 14 sampai 21
Ini adalah port D yang merupakan 8-bit port I/O. Setiap pinnya dapat menyediakan member arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Programmable port D (DDRD) harus disetting terlebih dahulu sebelum port D digunakan. Bit -bit DDRD diisi 0 jika ingin memfungsikan pin-pin port B yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Pin-pin port B juga memiliki untuk fungsi-fungsi alternatif khusus seperti yang terdapat pada Tabel 2.
Tabel 2. Fungsi pin pada port D
Port pin Fungsi
PD1 RDX (UART input line) PD2 TDX (UART output line)
PD3 INT0 ( external interrupt 0 input ) PD4 INT1 ( external interrupt 1 input )
PD5 OC1B ( Timer / counter1 output compare B match output) PD6 OC1A ( Timer / counter1 output compareA matchoutput) PD7 ICP ( Timer / counter1 input capture pin)
G. Pin 22 sampai 29
Ini adalah port C yang merupakan 8-bit port I/O. Setiap pinnya dapat menyediakan memberi arus 20mA dan dapat mengendalikan display LED secara langsung. Data Direction Programmable port C (DDRC) harus diatur terlebih dahulu sebelum port C digunakan. Bit-bit DDRC diisi 0 jika ingin memfungsikan pin–pin port C yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Selain itu, dua pin port C (PC6 dan PC7 ) juga memiliki fungsi alternatif sebagai osilator untuk timer / counter 2.
H. Pin 30
Merupakan masukan tegangan untuk ADC. I. Pin 31
Merupakan ground sumber tegangan yang diberi simbol GND sama dengan pin 11.
J. Pin 32
Adalah AREF yang merupakan masukan referensi bagi A/D converter. Untuk operasionalisasi ADC, suatu level tegangan antara AGDN dan Avcc.
K. Pin 33 sampai 40
Ini adalah port A yang merupakan 8-bit port I/O. Setiap pinnya dapat menyediakan internal pull-up resistor (dapat diatur per bit ). Output buffer port A dapat memberi arus 20mA dan dapat mengendalikan
display LED secara langsung. Data Direction Programmable port A
(DDRA) harus disetting terlebih dahulu sebelum port A digunakan. Bit-bit DDRA diisi 0 jika ingin memfungsikan pin-pin port A yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Selain itu, kedelapan pin port A juga digunakan untuk masukan sinyal analog bagi A/D converter[ 2].
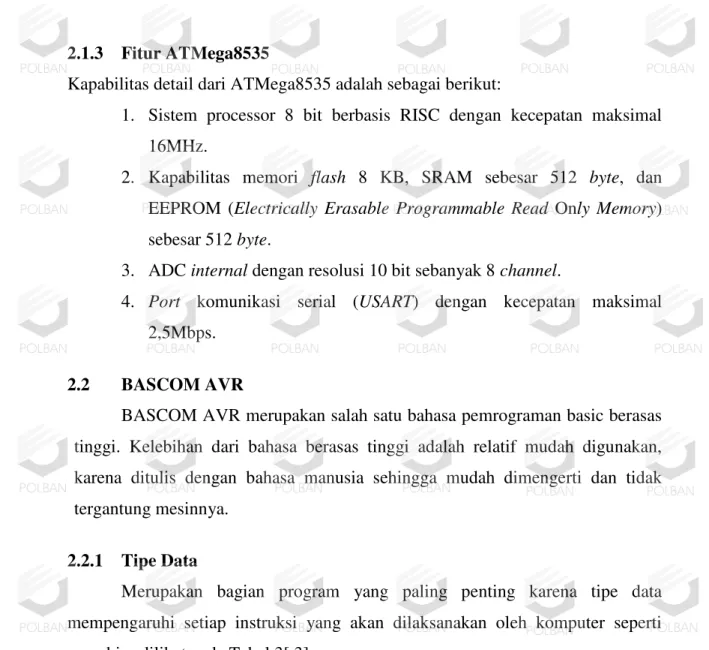
2.1.3 Fitur ATMega8535
Kapabilitas detail dari ATMega8535 adalah sebagai berikut:
1. Sistem processor 8 bit berbasis RISC dengan kecepatan maksimal 16MHz.
2. Kapabilitas memori flash 8 KB, SRAM sebesar 512 byte, dan EEPROM (Electrically Erasable Programmable Read Only Memory) sebesar 512 byte.
3. ADC internal dengan resolusi 10 bit sebanyak 8 channel.
4. Port komunikasi serial (USART) dengan kecepatan maksimal 2,5Mbps.
2.2 BASCOM AVR
BASCOM AVR merupakan salah satu bahasa pemrograman basic berasas tinggi. Kelebihan dari bahasa berasas tinggi adalah relatif mudah digunakan, karena ditulis dengan bahasa manusia sehingga mudah dimengerti dan tidak tergantung mesinnya.
2.2.1 Tipe Data
Merupakan bagian program yang paling penting karena tipe data mempengaruhi setiap instruksi yang akan dilaksanakan oleh komputer seperti yang bisa dilihat pada Tabel 3[ 3].
Tabel 3. Tipe-tipe data
2.2.2 Variabel
Variabel dalam sebuah pemrograman berfungsi sebagai tempat menyimpan atau menampung data sementara, misalnya untuk menampung hasil perhitungan, data pembacaan programmable, dan lainnya. Variabel merupakan pointer yang menunjukkan pada alamat memori fisik dan mikrokontroler. Dalam BASCOM, ada beberapa aturan dalam penamaan sebuah variabel :
1. Nama variabel maksimum terdiri atas 32 karakter. 2. Karakter biasa berupa angka atau huruf.
3. Nama variabel harus dimulai dengan huruf.
4. Variabel tidak boleh menggunakan kata-kata yang digunkan oleh BASCOM sebagai perintah, pernyataan, internal programmable, dan nama operator (AND, OR, DIM, dan lain-lain).
Sebelum digunakan, variabel harus dideklarasikan terlebih dahulu. Ada beberapa cara untuk mendeklarasikan sebuah variabel (data). Contoh kode pendeklarasian menggunakan DIM seperti pada Kode Program 1.
Kode Program 1. Pendeklarasian DIM
Dim nama as byte Dim tombol1 as integer Dim tombol2 as word
2.2.3 Konstanta
Dalam BASCOM, dikenal juga konstanta. Dengan menggunakan konstanta, kode program yang dibuat akan lebih mudah dibaca dan dapat mencegah kesalahan penulisan pada program. Misalnya, phi lebih mudah ditulis daripada menulis 3,14159867. Sama seperti variabel, agar konstanta bisa dikenali oleh program, maka harus dideklarasikan terlebih dahulu. Contoh kode program dapat dilihat pada table Kode Program 2 [ 2].
Kode Program 2. Pendeklarasian Konstanta
Dim A As Const 5
2.2.4 Operator
Operator-operator yang tersedia di BASCOM berfungsi untuk menggabungkan, memodifikasi, membandingkan, atau mendapatkan informasi tentang sebuah pernyataan. Operator yang tersedia adalah sebagai berikut:
a. Operator Aritmatika
Bahasa Basic menyediakan lima operator aritmatika, yaitu: • .* : untuk perkalian
• / : untuk pembagian
• % : untuk sisa pembagian (modulus) • + : untuk pertambahan
• - : untuk pengurangan
b. Operator Hubungan (Perbandingan)
Operator hubungan digunakan untuk membandingkan hubungan antara dua buah operand atau sebuah nilai atau variabel. Operator dalam bahasa basic:
= Equality X = Y
<> Inequality X <> Y
< Less than X < Y
> Greater than X > Y <= Less than or equal to X <= Y >= Greater than or equal to X >= Y
c. Operator Logika
Jika operator hubungan membandingkan hubungan antara dua buah
operand, maka operator logika digunakan untuk membandingkan
logika hasil dari operator-operator hubungan. Operator logika ada empat macam, yaitu :
NOT Logical complement
d. Operator Bitwise
Operator bitwise digunakan untuk memanipulasi bit dari data yang ada di memori. Operator bitwise dalam Bahasa Basic :
• Shift A, Left, 2 : Pergeseran bit ke kiri • Shift A, Right, 2 : Pergeseran bit ke kanan • Rotate A, Left, 2 : Putar bit ke kiri
• Rotate A, Riht, 2 : Putar bit ke kanan[ 3].
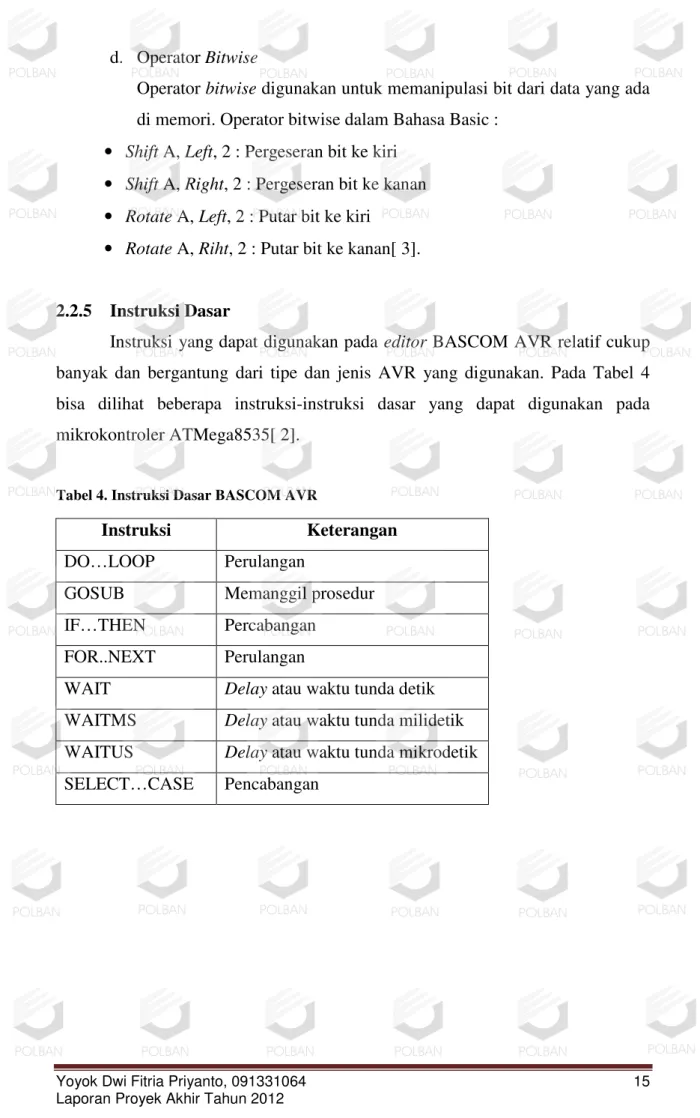
2.2.5 Instruksi Dasar
Instruksi yang dapat digunakan pada editor BASCOM AVR relatif cukup banyak dan bergantung dari tipe dan jenis AVR yang digunakan. Pada Tabel 4 bisa dilihat beberapa instruksi-instruksi dasar yang dapat digunakan pada mikrokontroler ATMega8535[ 2].
Tabel 4. Instruksi Dasar BASCOM AVR
Instruksi Keterangan
DO…LOOP Perulangan
GOSUB Memanggil prosedur
IF…THEN Percabangan
FOR..NEXT Perulangan
2.3 Bluetooth
Bluetooth adalah spesifikasi industri untuk jaringan kawasan pribadi
(personal area networks atau PAN) tanpa kabel. Bluetooth menghubungkan dan dapat dipakai untuk melakukan tukar-menukar informasi di antara peralatan-peralatan. Pada tahun 1994, di kota Lund Swedia, Ericsson mempelopori interkoneksi wireless yang lebih canggih dibandingkan dengan solusi infra merah pada waktu itu. Teknologi yang diberi nama Bluetooth ini kemudian dikembangkan secara bersama-sama dalam sebuah konsorsium yaitu Bluetooth
Special Interest Group (SIG). Dengan Bluetooth, perpindahan data antara device
tidak lagi harus tertahan pada bidang datar saja. Dengan Bluetooth juga, masalah jarak pada infra merah dapat dengan mudah dipecahkan karena cakupan jarak interkoneksi Bluetooth yang dapat mencapai hingga sepuluh meter[ 10].
2.3.1 Metode Kerja
Bluetooth bekerja dengan cara mengirimkan data melalui sinyal radio pada
frekuensi 2,4GHz. Rentang frekuensi ini telah digunakan sebagai standar dari Industrial, Scientific, and Medical devices (ISM). Bluetooth tidak sendirian dalam rentang sinyal ISM ini. Bahkan pesawat telepon wireless generasi terbarujuga menggunakan frekuensi ini. Untuk menghindari terjadinya sambungan silang dengan device lain pada frekuensi yang sama, Bluetooth bekerja dengan cara
spread spectrum frequency hopping (SSFH). Frequency hopping adalah istilah
yang menjabarkan bahwa selama Bluetooth aktif, maka device tersebut akan selalu berpindah frekuensi dalam rentang 2,42-2,48 GHz sebanyak 1.600 kali per detik. Untuk membantu menghindari terjadinya sambungan silang, sinyal yang digunakan oleh Bluetooth hanya sebesar 1 miliwatt[ 10].
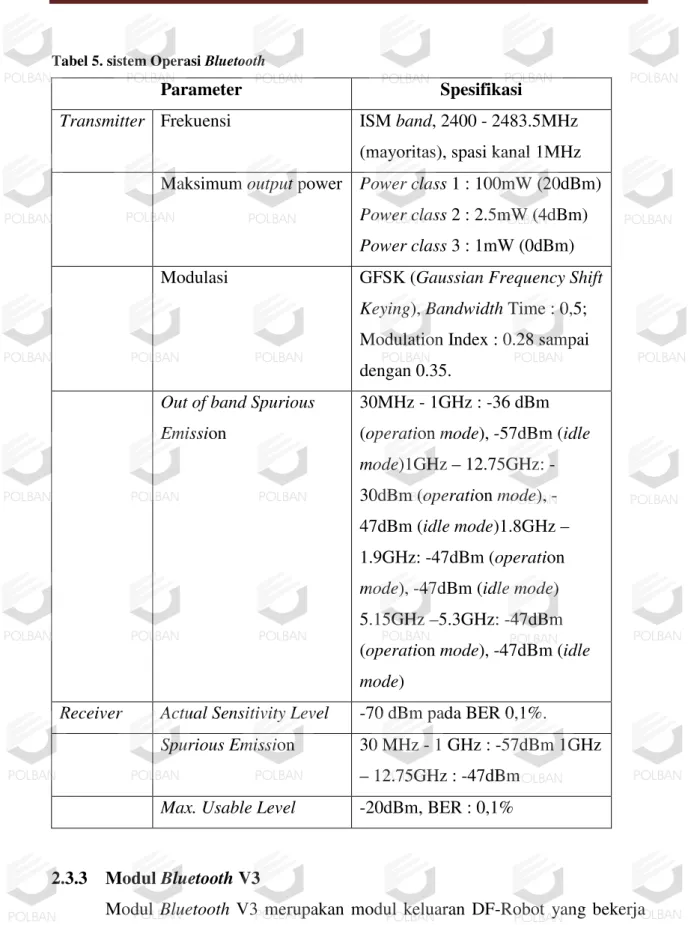
2.3.2 Sistem Operasi
Sistem Operasi yang digunakan pada Bluetooth berupa radio transceiver,
baseband link controller dan link manager. Pada Tabel 5 dapat dilihat beberapa
Tabel 5. sistem Operasi Bluetooth
Parameter Spesifikasi
Transmitter Frekuensi ISM band, 2400 - 2483.5MHz
(mayoritas), spasi kanal 1MHz Maksimum output power Power class 1 : 100mW (20dBm)
Power class 2 : 2.5mW (4dBm)
Power class 3 : 1mW (0dBm)
Modulasi GFSK (Gaussian Frequency Shift
Keying), Bandwidth Time : 0,5;
Modulation Index : 0.28 sampai dengan 0.35.
Out of band Spurious
Emission
30MHz - 1GHz : -36 dBm (operation mode), -57dBm (idle mode)1GHz – 12.75GHz: 30dBm (operation mode), -47dBm (idle mode)1.8GHz – 1.9GHz: -47dBm (operation mode), -47dBm (idle mode) 5.15GHz –5.3GHz: -47dBm (operation mode), -47dBm (idle
mode)
Receiver Actual Sensitivity Level -70 dBm pada BER 0,1%.
Spurious Emission 30 MHz - 1 GHz : -57dBm 1GHz
– 12.75GHz : -47dBm
Max. Usable Level -20dBm, BER : 0,1%
2.3.3 Modul Bluetooth V3
Modul Bluetooth V3 merupakan modul keluaran DF-Robot yang bekerja pada frekuensi 2,4-2,48GHz dengan modulasi GFSK (Gaussian Frequency Shift
Keying). Bentuk fisik Bluetooth V3 bisa dilihat pada Gambar 3.
Gambar 3. Modul Bluetooth V3
Bluetooth V3 mempunyai dua input power yang berbeda yaitu 3,5-8V DC
dan 3,3V DC. Dalam penggunanaanya, input power yang digunakan hanya satu dan bisa dipilih sesuai kebutuhan.
2.4 Relay
Relay adalah komponen yang terdiri dari sebuah kumparan berinti besi yang akan menghasilkan elektromagnet ketika kumparannya dialiri oleh arus listrik. Elektromagnet ini kemudian menarik mekanisme kontak yang akan menghubungkan kontak Open (NO) dan membuka kontak
Normally-Closed (NC).
Relay biasanya digunakan untuk menggerakkan arus atau tegangan yang besar (misalnya peralatan listrik 4 ampere AC 220 V) dengan memakai arus atau tegangan yang kecil (misalnya 0.1 ampere 12 Volt DC).
Secara sederhana relay elektromekanis ini didefinisikan sebagai berikut : • Alat yang menggunakan gaya elektromagnetik untuk menutup (atau
membuka) kontak saklar.
• Saklar yang digerakkan (secara mekanis) oleh daya/energi listrik.
Dalam pemakaiannya biasanya relay yang digerakkan dengan arus DC dilengkapi dengan sebuah dioda yang di-paralel dengan lilitannya dan dipasang terbaik yaitu anoda pada tegangan (-) dan katoda pada tegangan (+). Ini bertujuan untuk mengantisipasi sentakan listrik yang terjadi pada saat relay berganti posisi dari on ke off agar tidak merusak komponen di sekitarnya[ 9].
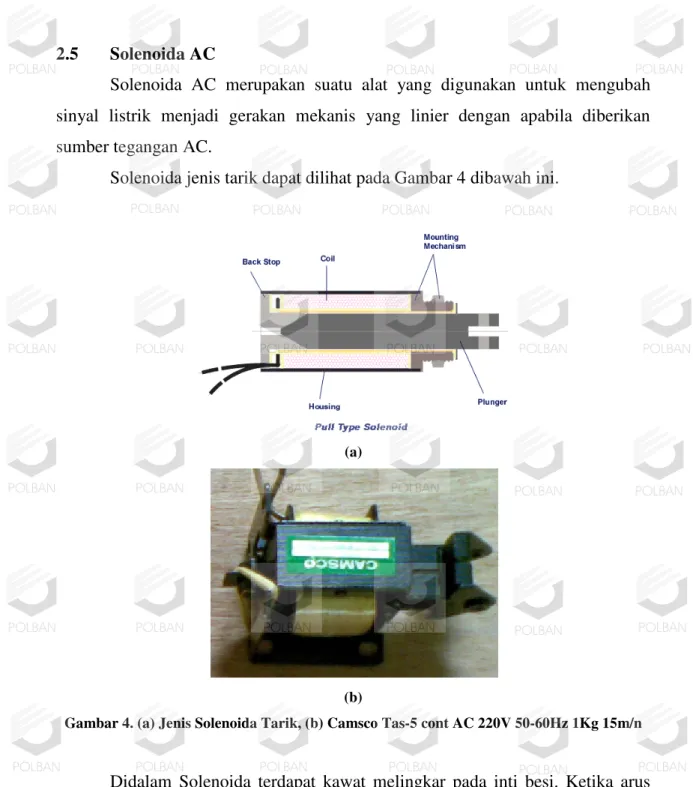
2.5 Solenoida AC
Solenoida AC merupakan suatu alat yang digunakan untuk mengubah sinyal listrik menjadi gerakan mekanis yang linier dengan apabila diberikan sumber tegangan AC.
Solenoida jenis tarik dapat dilihat pada Gambar 4 dibawah ini.
(a)
(b)
Gambar 4. (a) Jenis Solenoida Tarik, (b) Camsco Tas-5 cont AC 220V 50-60Hz 1Kg 15m/n
Didalam Solenoida terdapat kawat melingkar pada inti besi. Ketika arus listrik melalui kawat, maka terjadi medan magnet untuk menghasilkan energi yang bisa mendrong inti besi. Poros dalam dari solenoida adalah piston seperti silinder terbuat dari besi atau baja yang disebut plunger (setara dengan sebuah dimano). Medan magnet kemudian menerapkan kekuatan untuk plunger ini, baik menarik atau pun repeling (kembali posisi). Ketika medan magnet dimatikan, pegas
plunger kemudian kembali ke keadaan semula[ 11].
2.6 LCD 2x16
LCD (Liquid Crystal Display) adalah modul penampil yang banyak digunakan karena mempunyai tampilan yang menarik seperti pada Gambar 5. Modul LCD Character dapat dengan mudah dihubungkan dengan mikrokontroller seperti ATMega8535.
Gambar 5. Bentuk Fisik LCD 2x16[ 7]
LCD memanfaatkan silikon gallium dalam bentuk Kristal cair sebagai pemendar cahaya. Pada layar LCD, setiap matrik adalah susunan dua dimensi piksel yang dibagi dalam baris dan kolom. Dengan demikian, setiap pertemuan baris dan kolom adalah sebuah LED terdapat sebuah bidang latar (backplane), yang merupakan lempengan kaca bagian belakang dengan sisi dalam yang ditutupi oleh lapisan elektroda transparan. Dalam keadaan normal, cairan yang digunakan memiliki warna cerah. Daerah-daerah tertentu pada cairan akan berubah warnanya menjadi hitam ketika tegangan diterapkan antara bidang latar dan pola elektroda yang terdapat pada sisi dalam lempengan kaca bagian depan.
Beberapa keuntungan dari LCD adalah sebagai berikut:
1. Dapat menampilkan karakter ASCII, sehingga dapat mudah untuk membuat program tampilan
2. Mudah dihubungkan dengan port I/O karena hanya menggunakan 8 bit data dan 3 bit kontrol
3. Ukuran modul yang proporsional
LCD 2x16 mempunyai 16 buah pin dimana didalamnya terdapat 8 buah data bus. Tabel 6merupakan data pin dan fungsi dari LCD 2X16.
Tabel 6. Pin dan Fungsi
PIN Name Function
1 VSS Ground voltage
2 VCC +5V
3 VEE Contrast voltage
4 RS Register Select
0 = Instruction Register 1 = Data Register
5 R/W Read/ Write, to choose write or read mode
0 = Write mode 1 = Read mode
6 E Enable
0 = Start to lacht data to LCD character 1= Disable 7 DB0 Data bit 0 (LSB) 8 DB1 Data bit 0 9 DB2 Data bit 0 10 DB3 Data bit 0 11 DB4 Data bit 0 12 DB5 Data bit 0 13 DB6 Data bit 0 14 DB7 Data bit 0 (MSB)
15 BPL Back Plane Light
2.7 Keypad 4x4
Keypad matriks umumnya terdiri dari tombol / Push Button NO (Normally
Open) yang dirangkai dengan susunan baris dan kolom sehingga membentuk matriks. Susunan matriks ini menyebabkan banyak tombol dengan mengunakan sedikit pin mikrokontroller. Jika susunan matriks 4 baris dan 4 kolom maka banyak tombol yang dicapai adalah 16 buah seperti terlihat pada Gambar 6.
Gambar 6. Contoh scanning keypad
Pada Gambar 6, tombol yang ditekan adalah tombol “5”. B2 bernilai nol, sedangkan B1, B3, dan B4 adalah satu. Kemudian umpan-balik terdeteksi pada K2, maka dapat disimpulkan bahwa tombol yang ditekan adalah tombol “5”[ 5].
Metode scanning keypad adalah mendeteksi hubungan pin baris dan kolom karena tombol ditekan, secara berurutan, bergantian dan satu-persatu. Lebih jelasnya sebagai berikut :
Scanning output pin dimulai dari kolom 1 lalu deteksi :
Jika input baris 1 = 0 maka karakter ‘1’, Jika input baris 2 = 0 maka karakter ‘4’, Jika input baris 3 = 0 maka karakter ‘7’, Jika input baris 4 = 0 maka karakter ‘*’.
Setelah scanning kolom 1 selesai dilanjutkan ke kolom 2, lalu deteksi: Jika input baris 1 = 0 maka karakter ‘2’, Jika input baris 2 = 0 maka karakter ‘5’, Jika input baris 3 = 0 maka karakter ‘8’, Jika input baris 4 = 0 maka karakter ‘0’.
Setelah scanning kolom 2 selesai dilanjutkan ke kolom 3, lalu detekdi Jika input baris 1 = 0 maka karakter ‘3’, Jika input baris 2 = 0 maka karakter ‘6’, Jika input baris 3 = 0 maka karakter ‘9’ Jika input baris 4 = 0 maka karakter ‘#’.
![Gambar 1. Arsitektur ATMega8535[ 2]](https://thumb-ap.123doks.com/thumbv2/123dok/2926904.3692440/2.892.120.806.63.1170/gambar-arsitektur-atmega.webp)
![Gambar 5. Bentuk Fisik LCD 2x16[ 7]](https://thumb-ap.123doks.com/thumbv2/123dok/2926904.3692440/16.892.109.818.58.1179/gambar-bentuk-fisik-lcd-x.webp)
