SKRIPSI
Disusun oleh :
Imam Anzhor i
0834010075
J URUSAN TEKNIK INFORMATIKA
FAKULTAS TEKNOLOGI INDUSTRI
UNIVERSITAS PEMBANGUNAN NASIONAL “VETERAN” JAWA
TIMUR
ALAT PENGENDALI PEMBERI PAKAN IKAN OTOM ATIS
DENGAN SMS GATEWAY BERBASIS MIKROKONTROLER
Disusun Oleh :
IMAM ANZHORI
NPM. 0834010075
Telah disetujui untuk mengikuti Ujian Negara Lisan Gelombang VI Tahun Akademik 2011/2012
Pembimbing Utama Pembimbing Pendamping
HARIANTO S.Kom, M.Eng WAHYU S.J SAPUTRA S,Kom, M,Kom NIDN. 0722087710 NPT. 3 8608 10 0295 1
Mengetahui,
Ketua J urusan Teknik Infor matika Fakultas Teknologi Industri UPN ”Veteran” J awa Timur
DENGAN SMS GATEWAY BERBASIS MIKROKONTROLER
Disusun Oleh :
IMAM ANZHORI NPM. 0834010075
Telah dipertahankan di hadapan dan diterima oleh Tim Penguji Skr ipsi J urusan Teknik Infor matika Fakultas Teknologi Industri
Univer sitas Pembangunan Nasional ”Veteran” J awa Timur Pada Tanggal 14 Desember 2012
Pembimbing : Tim Penguji :
WAHYU S.J SAPUTRA S,Kom, M,Kom Rinci Kembang Hapsari, S.Si., M.Kom
NPT. 38608 100 2951 NPT. 3 7712 080 1681
3.
Fetty Tri Anggraeny, S.Kom, M.Kom NIP. 19611110 199103 2 001
Mengetahui,
Dekan Fakultas Teknologi Industri
Univer sitas Pembangunan Nasional ”Veteran” J awa Timur
FAKULTAS TEKNOLOGI INDUSTRI PANITIA UJ IAN SKRIPSI / KOMPREHENSIF
KETERANGAN REVISI Mahasiswa di bawah ini :
Nama : IMAM ANZHORI NPM : 0834010075 Jurusan : Teknik Informatika
Telah mengerjakan revisi/ tidak ada revisi*) pra rencana (design)/ skripsi ujian lisan gelombang VI, TA 2011/2012 dengan judul:
ALAT PENGENDALI PEMBERI PAKAN IKAN OTOM ATIS
DENGAN SMS GATEWAY BERBASIS MIKROKONTROLER
Surabaya,14 Desember 2012 Dosen Penguji yang memerintahkan revisi:
1) Pr of. Dr. Ir. Sri Redjeki, MT NIP. 19570314 198603 2 001
2) Rinci Kembang Hapsari, S.Si., M.Kom NPT. 3 7712 080 1681
3) Fetty Tri Anggraeny, S.Kom, M.Kom NIP. 19611110 199103 2 001
ii
Alhamdulillah, atas puji dan kehadirat Allah SWT, atas limpahan Rahmat serta Kasih Sayang-Nya sehingga Laporan Tugas Akhir ini dapat diselesaikan dengan baik.
Laporan Tugas Akhir ini disusun sebagai syarat untuk menempuh tugas akhir di Universitas Pembangunan Nasional “VETERAN” Jatim. Penulis membahas tentang Pembuatan Alat Pengendali Pemberi Pakan Ikan Otomatis dengan SMS Gateway Berbasis Mikrokontroler.
Pada kesempatan ini penulis banyak mengucapkan terima kasih kepada:
1. Bapak Ir. Sutiyono, MT selaku Dekan fakultas Teknologi Industri Universitas Pembangunan Nasional “Veteran” Jawa Timur Surabaya.
2. Ibu Dr. Ir. Ni Ketut Sari, MT., selaku ketua jurusan Teknik Informatika Universitas Pembangunan Nasional “Veteran” Jatim.
3. Bapak Harianto, S.Kom, M.Eng
.
sebagai Dosen pembimbing I yang telah meluangkan waktu memberikan kontribusi berupa masukan dan koreksi yang berguna dalam membimbing menyelesaikan Tugas Akhir ini.4. Bapak Wahyu S.J Saputra, S.Kom, M.Kom. sebagai Dosen pembimbing II yang telah meluangkan waktu memberikan kontribusi berupa masukan dan koreksi yang berguna dalam membimbing menyelesaikan Tugas Akhir ini.
Akhir.
7. Terima kasih kepada kedua orang tua yang telah memberikan dorongan motivasi dan do’a untuk menyelesaikan Tugas Akhir ini.
8. Kakak, Adik dan keluarga kami yang selaku memberikan dukungannya kepada kami dalam menyelesaikan Tugas Akhir ini.
9. Sahabat Grub Sempak, Joko Setiawan(jojo-jojon ibenk), Bulek Yuliana(nyemong), M. Zainudin Fitroh(Q-mon), Tante Dian Erlina(tuwek gk negai), Denny Prawidianto(Picenk), Novery A(Ahong) yang membantu memberikan support dan do’a.
10.Kepada teman – teman yang tidak dapat kami sebutkan satu-persatu atas segala bantuannya dalam menyelesaikan Tugas Akhir ini.
Penulis menyadari bahwa masih banyak kekurangan dalam menyelesaikan kerja praktek ini, namun penulis berharap semoga pelaksanaan kerja praktek ini dapat ikut menunjang perkembangan ilmu pengtahuan, khususnya Teknik Informatika, kritik dan saran yang membangun kami harapkan nntuk kesempurnaan penukisan laporan ini, semoga dapat bermanfaat.
DAFTAR ISI
ABSTRAK ...i
KATA PENGANTAR ...ii
DAFTAR ISI ...iv
DAFTAR GAMBAR ... viii
DAFTAR TABEL ...xi
BAB I : PENDAHULUAN ...1
1.1. Latar Belakang ...1
1.2. Rumusan Masalah ...2
1.3. Batasan Masalah...2
1.4. Tujuan Penelitian ...3
1.5. Manfaat Penelitian...3
1.6. Metodologi Pelaksanaan ...4
1.7. Sistematika Penulisan ...5
BAB II : TINJ AUAN PUSTAKA ...7
2.1. Kebutuhan Hardware ...7
2.2. Pengenalan Mikrokontroler ... ....7
2.2.1. Fitur Mikrokontroler ATmega16A ...10
2.2.2. Arsitektur Mikrokontroler ATmega16A ...11
2.2.3. Konfigurasi Pin ATmega16A ...12
2.2.4. Organisasi Memori ...17
2.2.6. Interupsi ...20
2.2.7. Interupsi External ...21
2.3. Solenoid ...22
2.4. Relay ...23
2.5. Infrared ...23
2.6. Sensor Photodiode ...25
2.7. Wavecom M1306B ...25
2.8. RTC DS1307 ...27
2.9. LCD 16x2 Character ... 29
2.10. ADC ... 30
2.11. Kebutuhan Software ... 31
2.12. CodeVisionAVR ... 31
2.12.1.Bagian CodeVisionAVR ... 33
2.12.2.Pemilihan Chip ... 35
2.12.3.Inisialisasi LCD port I/O ... 36
2.13. DT-HIQ AVR-51 USP ISP ... 37
2.14. Isis Proteus ... 39
2.15. AT Command ... 41
2.16. Sejarah SMS ... 42
2.17. SMS Gateway ... 43
BAB III : ANALISA DAN PERANCANGAN SISTEM ...46
3.3. Perancangan Sistem ...48
3.3.1. Alur Utama Sistem ...49
3.3.2. Rangkaian Sistem Minimum Atmega16A ...50
3.3.3. Rangkaian RTC DS1307 ...52
3.3.4. Rangkaian Photodiode ...53
3.3.5. Rangkaian Push Button ...54
3.3.6. Cara merangkai Alat ...55
3.3.7. Analisa Perancangan Perangkat Keras ...56
3.3.8. Analisa Perancangan Perangkat Lunak ...60
BAB IV : IMPLEMENTASI PERANGKAT LUNAK ...69
4.1. Alat-alat yang Digunakan ...69
4.1.1. Perangkat Keras ... 69
4.1.2. Perangkat Lunak ... 70
4.2. Implementasi Hardwere ...70
4.2.1. Rangkaian Minimum Mikrokontroler Atmega16A... 70
4.2.2. Implementasi Miniatur Pakan Ikan ... 71
4.2.3. Infrared ... 72
4.2.4. Sensor Photodiode ... 73
4.2.5. Motor Solenoid ... 74
4.2.6. Wavecom M1306B ... 75
4.2.8. RTC DS1307 ... 76
4.2.9. Push Button ... 76
4.3. Implementasi IC RTC DS1307 ... 77
4.4 Implementasi Wavecom M1306 ... 77
4.5 Implementasi Software di Mikrokontroler ... 78
BAB V : PENGUJ IAN DAN ANALISA ...83
5.1. Pengujian Alat ... ....83
5.1.1. Uji Coba ISP MKII ...83
5.1.2. Pengujian Mikrokontroler Atmega16A ...84
5.1.3. Pengujian Alat Keseluruhan...85
5.2. Pengujian Alat ... ....85
5.2.1. Inisialisasi Waktu ... 85
5.2.2. Pengujian Pemberi Pakan Ikan ...86
5.3. Tabel Hasil Pengujian Alat ... 88
BAB VI : PENUTUP ...90
6.1. Kesimpulan ...90
6.2. Saran ...90
Judul : Alat Pengendali Pemberi Pakan Ikan Otomatis dengan SMS Gateway Berbasis Mikrokontroler.
Pembimbing 1 : Harianto S.Kom. M.Eng. Pembimbing 2 : Wahyu J.S Saputra S.Kom. Penyusun : Imam Anzhori.
ABSTRAK
Pada perkembangan kebutuhan akan teknologi komputer dirasa semakin penting, dan tidak hanya dalam satu bidang saja tapi semua bidang membutuhkan teknologi. Maka dari itu muncul ide untuk mengoperasikan suatu sistem dengan menggunakan teknologi, khususnya teknologi komputer.
Sistem pengontrolan yang dilakukan oleh komputer akan menjadi lebih baik, cepat, tepat, aman, praktis, dan masih banyak lagi keuntungan lain yang didapatkan dari pada menggunakan cara manual. Beberapa keuntungan yang ada, dapat dijadikan syarat untuk mewujudkan “Alat Pengendali Pemberi Pakan Ikan Otomatis dengan SMS Gateway Berbasis Mikrokontroler”.
Pemeliharaan ikan secara otomatis oleh alat pengontrol akan memudahkan para penggemar ikan dalam pemeliharaan ikan, terutama pada saat ikan tersebut ditinggal oleh pemiliknya. Secara umum alat ini telah dilengkapi oleh fasilitas pengontrol secara hardware maupun software sehingga dengan Tugas Akhir ini diharapkan dapat memberi ide untuk mengoptimalkan penggunaan fasilitas kontrol tersebut.
PENDAHULUAN
1.1 Latar Belakang
Ikan yang di pelihara dalam aquariuam harus di perhatikan waktu
pemberian pakannya sehingga ikan tersebut membutuhkan makanan yang teratur
dan terus menerus. Memelihara ikan adalah suatu hobi masyarakat yang sangat
di gemari dari dulu hingga sekarang, karena kemudahan dalam pemeliharaan dan
perawatannya membuat semua orang ingin memelihara ikan dengan harga
jualnya yang tinggi. Ada kesulitan yang di hadapi ketika seseorang harus
bepergian hingga memakan waktu yang lama sampai berhari-hari, dan pasti akan
berpikir bagaimana dengan ikan-ikan yang di peliharanya, bagaimana caranya
bisa memberi makan ikan-ikan tersebut dengan terus menerus atau terjadwal
tanpa harus mengganggu aktivitas sehari-hari.
Alat pemberiaan pakan ikan secara otomatis ini sangat diperlukan oleh
orang yang memiliki banyak aktivitas, karena dengan pemberian makanan yang
sudah dirancang secara otomatis orang tersebut tidak perlu khawatir lupa atau
harus ada untuk memberi makan ikan peliharaannya. Alat ini dapat menjaga
pola makan ikan sehingga selalu dalam kondisi prima dan akan memberi
dampak yang bagus ketika dinikmati keindahan dari ikan peliharaannya. Untuk
mendukung perancangan alat ini maka dengan itu alat ini menarik untuk
diteliti atau dicoba pada Mikrokontroler. Dengan alat ini diharapkan lebih
efisien, sehingga tidak perlu intervensi manusia (operator manual) untuk
Sistem kerja yang dipakai dalam merancang alat pemberian pakan
ikan secara otomatis ini memerlukan orang untuk meletakkan pakan ikan
yang berupa pelet di dalam penampung pakan yang telah disediakan, alat ini
menggunakan RTC yang berguna untuk menyimpan waktu yang telah
ditentukan. Jika waktu yang ditentukan sesuai maka motor solenoid yang berada
di wadah akan membuka pintu tempat penyimpanan pakan ikan. Dengan adanya
sensor infrared dan modem wavecom apabila pakan ikan akan habis maka alat ini mengirimkan pesan melalui SMS Gateway, maka tinggal ditambahkan saja peletnya ke wadah. Pada referensi sebelumnya sensor yang digunakan RTC DS1307 dan tidak menggunakan SMS Gateway. Penelitian yang sedang saya kerjakan saat ini saya menambahkan sensor Photodiode dan sensor Infrared serta perintah AT-Command sebagai SMS Gateway.
1.2 Rumusan Masalah
Dalam Penjelasan yang telah di sampaikan pada Latar Belakang di atas, dapat dirumuskan permasalahan alat pengendali pemberi pakan ikan otomatis dengan sms gateway berbasis mikrokontroler untuk saat ini adalah sebagai berikut
a. Bagaimana alat pengenda li pe mber i pakan ika n oto mat is ini bekerja?
b. Bagaimana pemilik ikan akan tahu, ketika pakan ikan yang berada diwadah akan habis?
1.3 Batasan Masalah
a. Sistem pengendalian yang akan digunakan sebagai pengolah data berbasis Mikrokontroler ATmega16A.
b. Penggunaan Motor solenoid sebagai penggerak buka dan tutup tempat penyimpanan pakan.
c. Penggunaan software AVRCodeVision C compiler untuk pembuatan program pada mikrokontroller dengan bahasa C.
d. Penggunaan LCD untuk menampikan informasi waktu.
e. Penggunaan InfraRed dan sensor photodiode sebagai pemberitahuan apabila pakan di dalam wadah akan habis dan sensor ini akan memberi perintah ke modem agar mengirimkan peringatan melalui SMS Gateway.
f. Penggunaan modem sebagai peringatan melalui SMS Gateway.
g. Tidak menggunakan Database dalam penyimpanan SMS dalam modem.
h. Alat ini tidak bisa menerima perintah SMS dari user. 1.4 Tujuan
Merancang sebuah alat yang dapat mengendalikan makanan ikan secara otomatis.
1.5 Manfaat
Adanya penelitian ini diharapkan dapat bermanfaat :
b. Dapat digunakan untuk mempermudah pemberian pakan ikan dan memberikan peringatan kepada pemilik ikan bahwa pakan ikan akan habis melalui SMS Gateway.
c. Meningkatkan kemampuan sistem berbasis SMS Gateway dan mikrokontroler yang semakin berkembang pesat dewasa ini. 1.6 Metodologi Penelitian
Metode penelitian yang digunakan dalam pembuatan sistem mikrokontroler ini melalui percobaan langsung jika gagal maka akan terus dicoba lagi atau trayer error Dan untuk melakukan penelitian tersebut, berikut tahap - tahapanya :
a. Review Literatur
Mengumpulkan referensi baik dari internet, buku maupun sumber-sumber lainnya serta mencari tools yang diperlukan untuk membuat simulasi tersebut sebagai tambahan referensi Tugas Akhir ini.
b. Analisa Per ancangan
Tahap ini merupakan tahap yang paling banyak memerlukan waktu karena model dan rancangan alat yang telah dibuat di implementasikan dengan menggunakan media mikrokontroler
c. Pembuatan Software
d. Uji coba alat dan evaluasi
Pada tahap ini setelah selesai dibuat maka dilakukan pengujian alat untuk mengetahui apakah sistem tersebut telah bekerja dengan benar sesuai dengan konsep yang diajukan atau tidak.
e. Kesimpulan
Pada tahap ini dalam bagian akhir pembuatan Tugas Akhir. Dibuat kesimpulan dan saran dari hasil pembuatan sistem simulasi yang diperoleh sesuai dengan dasar teori yang mendukung dalam pembuatan konsep tersebut yang telah dikerjakan secara keseluruhan. f. Penyusunan buku Laporan
Pada tahap ini merupakan tahap akhir dari pengerjaan Tugas Akhir. Buku ini disusun sebagai laporan dari seluruh proses pengerjaan Tugas Akhir, dari penyusunan buku ini diharapkan dapat memudahkan pembaca yang ingin menyempurnakan dan mengembangkan sistem simulasi lebih lanjut.
1.7 Sistematika Penulisan
BAB I PENDAHULUAN
Bab ini berisi Latar Belakang, Rumusan Masalah, Batasan Masalah, Tujuan, Manfaat, Metodologi Penulisan, dan Sistematika Penulisan Skripsi.
BAB II TINJ AUAN PUSTAKA
konsep dasar mikrokontroler, konsep dasar komunikasi serial dengan komputer.
BAB III ANALISIS DAN PERANCANGAN SISTEM
Bab ini berisi tentang perancangan sistem apa saja yang perlu di analisa dan digunakan yang meliputi : kebutuhan data, kebutuhan hardware dan software, kebutuhan proses, perancangan sistem yang berbasis mikrokontroler, serta analisa dan desain sistem yang telah dibuat sebelumnya. BAB IV IMPLEMENTASI SISTEM
Bab ini menjelaskan tentang implementasi dari program yang telah dibuat sebelumnya, dan ini merupakan bagian yang paling penting untuk menjawab dari permasalahan yang terjadi.
BAB V UJ I COBA DAN EVALUASI
Bab ini menjelaskan tentang uji coba dari program yang telah dibuat dan melakukan pengevaluasian terhadap program serta cara kerja apakah sesuai dengan tujuan yang dimaksud.
BAB VI KESIMPULAN DAN SARAN
TINJ AUAN PUSTAKA
Bab ini akan menjelaskan dari bagian – bagian peralatan yang digunakan yang menyangkut kebutuhan hardware dan kebutuhan software dalam pembuatan Alat Pengendali Pemberi Pakan Ikan Otomatis dengan SMS Gateway Berbasis Mikrokontroler.
2.1 Kebutuhan Hardware
Dalam pembuatan Alat Pengendali Pemberi Pakan Ikan Otomatis dengan SMS Gateway Berbasis Mikrokontroler dibutuhkan suatu kebutuhan. Kebutuhan ini menyangkut kebutuhan hardware dan kebutuhan software untuk mendukungnya. Dan kebutuhan tersebut sangat mempengaruhi dalam pembuatan sistem pengontrol pakan ikan.
Adapun hardware yang digunakan dalam perancangan Alat Pengendali Pemberi Pakan Ikan Otomatis dengan SMS Gateway yaitu mikrokontroler tipe ATmega16A, RTC, infrared, sensor photodiode, Motor solenoid, relay, modem wavecom. Kebutuhan ini nantinya akan berpengaruh dalam sistemnya. Dan kebutuhan perangkat keras tersebut mudah di temui di pasaran.
Tanpa adanya kebutuhan ini maka sistem tidak akan berjalan dan tidak dapat difungsikan. Beberapa penjelasan tentang kebutuhan perangkat keras yang mendukung pembuatan sistem pemberi pakan ikan ini akan di jelaskan dibawah ini.
2.2 Pengenalan Mikrokontroler
microwave oven, televisi, mesin cuci, sistem keamanan rumah, PDA, dll. Mikrokontroler dapat kita gunakan untuk berbagai aplikasi misalnya untuk pengendalian, otomasi industri, telekomunikasi, dan lain-lain. Keuntungan menggunakan mikrokontroler yaitu harganya murah, dapat di program berulang kali, dan dapat kita program sesuai dengan keinginan kita. Saat ini keluarga mikrokontroler yang ada dipasaran yaitu Intel 8048 dan 8051(MCS 51), Motorola 68HC11, Microchip PIC, Hitachi H8, dan Atmel AVR.
Salah satu mikrokontroler yang banyak digunakan saat ini yaitu mikrokontroler AVR, AVR adalah mikrokontroler RISC (Reduce Instruction Set Compute) 8 bit berdasarkan arsitektur Harvard, yang dibuat oleh Atmel pada tahun 1996. AVR mempunyai kepanjangan Advanced Versatile RISC atau Alf and Vegard’sRiscproessor yang berasal dari nama dua mahasiswa Norwegia Institute of Technology (NTH), yaitu alf-EgilBogen danVegard Wollan.
berbagai keperluan lain. Secara umum mikrokontroler AVR dapat dikelompokkan menjadi 3 kelompok, yaitu TinyAVR, AVR, dan MegaAVR.
Tabel 2.1. Pebedaan Seri AVR Berdasarkan Jumlah Memori.
Microcontroller AVR Memori (byte)
Jenis Paket IC Flash EEPROM SRAM
TinyAVR 8-32 Pin 1-2K 64-128 0-128
AVR (classic AVR) 20-44 Pin 1-8K 128-512 0-1K
MegaAVR 32-64 Pin 8-128K 512-4K 512-4K
Pemrograman mikrokontroler AVR dapat menggunakan low level language (assembly) dan high level language (C, Basic, Pascal, Java, dll) tergantung compiler yang digunakan. Bahasa Assembler mikrokontroler AVR memiliki kesamaan intruksi, sehingga jika pemrograman satu jenis mikrokontroler AVR sudah dikuasai, maka akan dengan mudah menguasai pemrograman keseluruhan mikrokontroler jenis AVR, namun bahasa assembler relative lebih sulit dipelajari dari pada bahasa C, untuk pembuatan suatu proyek yang besarakan memakan waktu yang lama, serta penulisan programnya akan panjang. Sedangkan Bahasa C memilik ikeunggulan disbanding bahasa assembler yaitu independent terhadap hardware serta lebih mudah untuk menangani project yang besar. Bahasa C memiliki keuntungan-keuntungan yang dipunyai oleh bahasa mesin (assembly), hampir semua operasi yang dapat dilakukan oleh bahasa mesin, dapat dilakukan oleh bahasa C dengan penyusunan program yang lebih sederhana dan mudah.
2.2.1 Fitur-fitur Mikrokontroler ATmega16A
Mikrokontroler adalah mikroprosesor yang dirancang khusus untuk aplikasi kontrol, dan dilengkapi dengan ROM, RAM dan fasilitas I/O pada satu chip. ATmega16A adalah salah satu anggota dari keluarga ATmega. ATmega16A dirancang oleh Atmel sesuai dengan instruksi standar dan susunan pin 80C5. Fitur-fitur yang dimiliki ATmega16A sebagai berikut:
1. Sistem mikrokontroler 8 bit berbasis RISC dengan kecepatan maksimal 16 MHz.
2. Memiliki memori flash 8 KB, SRAM sebesar 1 kbyte dan EEPROM (Electrically Erasable Programmable Read Only Memory) sebesar 512 byte.
3. Memiliki ADC (Analog Digital Converter) internal dengan ketelitian 10 bit sebanyak 8 saluran.
4. Memiliki PWM (Pulse Wide Modulation) internal sebanyak 4 saluran. 5. Portal komunikasi serial (USART) dengan kecepatan maksimal 2,5
Mbps.
2.2.2 Ar sitektur mikrokontroler ATmega16A
Gambar 2.1. Blok Diagram AVR ATmega16A.
1. Saluran I/O sebanyak 32 buah, yaitu port A, port B, port C, dan port D.
2. CPU yang memiliki 32 buah register. 3. SRAM sebesar 1 kbyte.
4. Flash memory sebesar 16kb yang memiliki kemampuan Read While Write.
5. EEPROM sebesar 512 byte dapat diprogram selama beroperasi. 6. Tiga buah timer/counter dengan kemampuan pembanding. 7. Two wire serial Interface.
8. Port antarmuka SPI.
9. Unit interupsi internal dan eksternal. 10. Port USART untuk komunikasi serial. 11. ADC 10 bit sebanyak 8 saluran.
12. Watchdog Timer dengan osilator internal. 13. Antarmuka komparator analog.
2.2.3 Konfigurasi pin ATmega16A
Gambar 2.2. Konfigurasi Pin ATmega16A.
Berikut adalah penjelasan fungsi tiap kaki. a. Port A
Merupakan 8-bit directional port I/O. Setiap pinnya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer Port A dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port A (DDRA) harus disetting terlebih dahulu sebelum Port A digunakan. Bit-bit DDRA diisi 0 jika ingin memfungsikan pin-pin port A yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Selain itu, ke delapan pin port A juga digunakan untuk
masukan sinyal analog bagi A/D converter.
b. Port B
secara langsung. Data Direction Register port B (DDRB) harus disetting terlebih dahulu sebelum Port B digunakan. Bit-bit DDRB diisi 0 jika ingin memfungsikan pin-pin port B yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Pin-pin port B juga memiliki fungsi-fungsi alternatif khusus seperti yang dapat dilihat dalam Table 2.2.
Tabel 2.2. PIN port B Atmega16A.
Port Pin Fungsi Khusus
PB0 TO = Timer/counter 0 external counter input PB1 T1 = Timer/counter 0 external counter input PB2 AINO = analog comparator positive input PB3 AIN1 = analog comparator negative input PB4 SS = SPI slave select input
PB5 MOSI = SPI bus Master output/slave input PB6 MISO = SPI bus Master input/slave input PB7 SCK = SPI bus serial clock
c. Port C
jika sebagai output. Selain itu, dua pin port C (PC6 dan PC7) juga memiliki fungsi alternative sebagai oscillator untuk timer/counter 2.
Tabel 2.3. PIN port C ATmega16A.
Pin FUNGSI KHUSUS
PC7 TOSC2 (Timer Oscillator Pin2) PC6 TOSC1 (Timer Oscillator Pin1) PC5 Input/Output
PC4 Input/Output PC3 Input/Output PC2 Input/Output
PC1 SDA (Two-wire Serial Buas Data input/output line) PC1 SCL (Two-wire Serial Buas Clock Line)
d. Port D
e. VCC
Merupakan Pin yang berfungsi sebagai pin masukan catu daya.
f. RESET
RST pada pin 9 merupakan reset dari AVR. Jika pada pin ini diberi masukan low selama minimal 2 machine cycle maka system akan di-reset. g. XTAL1
XTAL1 adalah masukan ke inverting oscillator amplifier dan input ke internal clock operating circuit.
h. XTAL2
XTAL2 adalah output dari inverting oscillator amplifier. i. AVcc
Avcc adalah kaki masukan tegangan bagi A/D Converter. Kaki ini harus secara eksternal terhubung ke Vcc melalui low pass filter.
j. AREF
k. GND
AGND adalah kaki untuk analog ground. Hubungkan kaki ini ke GND, kecuali jika board memiliki anlaog ground yang terpisah.
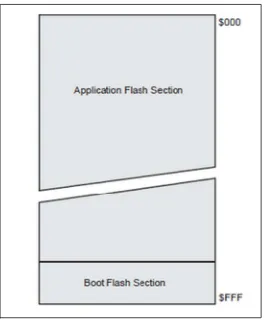
2.2.4 Organisasi Memori
ATmega16A memiliki ruang pengalamatan memori data dan memori program yang terpisah. Sebagai tambahan, ATmega16A memiliki fitur suatu EEPROM Memori untuk penyimpanan data.
1) Memori Data
Gambar 2.3. Peta Memori Data AVR ATmega16A. 2) Memori Pr ogram
Gambar 2.4. Peta Memori Program AVR ATmega16A. 2.2.5 Register
Status register adalah register berisi status yang dihasilkan pada setiap operasi yang dilakukan ketika suatu instruksi dieksekusi. SREG merupakan bagian dari inti CPU mikrokontroler.
Gambar 2.5. Status Register ATMega16A. Bit7 -- I (Global Interrupt Enable),
hardware, setelah program interrupt dieksekusi, maka bit ini harus di set kembali dengan instruksi SEI.
Bit 6 – T : Bit Copy Storage
Instruksi bit copy BLD dan BST menggunakan bit T sebagai sumber atau tujuan dalam operasi bit.
Bit 5 – H : Half Carry Flag Bit 4 – S : Sign Bit
Bit S merupakan hasil exlusive or dari Negative Flag N dan Two’s Complement Overflow Flag V.
Bit 3 – V : Two’s Complement Overflow Flag Digunakan dalam operasi aritmatika Bit 2 – N : Negative Flag
Jika operasi aritmatika menghasilkan bilangan negatif, maka bit ini akan set.
Bit 1 – Z : Zero Flag
Jika operasi aritmatika menghasilkan bilangan nol, maka bit ini akan set.
2.2.6 Interupsi
Tabel 2.4. Fasilitas Interupsi Yang Dimiliki ATmega16A.
2.2.7 Interupt External
Gambar 2.6. Register MCUCK (MCU Control Register). 2.3 Solenoid
Solenoid adalah suatu kumparan kawat panjang dengan suatu pola seperti bentuk sekrup, yang pada umumnya dikelilingi oleh suatu bingkai baja dan mempunyai suatu inti baja di dalam lilitan. Ketika ada aliran arus litrik solenoid menjadi alat elektromagnetik, di mana tenaga elektris diubah jadi pekerjaan mekanis.
Gambar 2.7. Solenoid Valve.
maka harus digunakan bahan yang baik pula. Hal tersebut penting bagi suatu solenoid untuk menghilangkan gaya magnetisnya ketika daya listrik masukan dipindahkan, ha lini untuk memungkinkan pengisap/spekulan tersebut dapat kembali lagi ke posisi aslinya. Sedangkan medan magnet sisanya disebut kemagnetan bersifat sisa. Sumber : Andi Winoto, 2010.
2.4 Relay
Transistor tidak dapat berfungsi sebagai sebagai switch (saklar) tegangan DC atau tegangan tinggi .Selain itu, umumnya tidak digunakan sebagai switching untuk arus besar (>5 A). Dalam hal ini, penggunakan relay sangatlah tepat. Relay berfungsi sebagai saklar yang bekerja berdasarkan input yang dimilikinya.
Keuntungan relay :
• Dapat switch AC dan DC, transistor hanya switch DC
• Relay dapat switch tegangan tinggi, transistor tidak dapat
• Relay pilihan yang tepat untuk switching arus yang besar
• Relay dapat switch banyak kontak dalam 1 waktu Kekurangan relay :
• Relay ukurannya jauh lebih besar daripada transistor
• Relay tidak dapat switch dengan cepat
• Relay butuh daya lebih besar disbanding transistor
• Relay membutuhkan arus input yang besar Sumber : Widodo, 2010.
2.5 InfraRed
Sinar infra merah merupakan cahaya yang tidak tampak. Jika dilihat dengan dengan spektroskop cahaya maka radiasi cahaya infra merah akan nampak pada spectrum elektromagnet dengan panjang gelombang di atas panjang gelombang cahaya merah. Dengan panjang gelombang ini maka cahaya infra merah ini akan tidak tampak oleh mata namun radiasi panas yang ditimbulkannya masih terasa/dideteksi.
Gambar 2.8. InfraRed.
2.6 Sensor Photodiode
Photodiode merupakan sensor cahaya semi konduktor yang dapat
mengubah besaran cahaya menjadi besaran listrik. Photodioda merupakan sebuah
dioda dengan sambungan p-n yang dipengaruhi cahaya dalam kerjanya. Cahaya
yang dapat dideteksi oleh photodiode ini mulai dari cahaya infra merah, cahaya
tampak, ultra ungu sampai dengan sinar-X.
Gambar 2.9. Sensor Photodiode.
Prinsip kerja, karena photodiode terbuat dari semikonduktor p-n junction
maka cahaya yang diserap oleh photodiode akan mengakibatkan terjadinya
pergeseran foton yang akan menghasilkan pasangan electron-hole dikedua sisi
dari sambungan. Ketika elektron-elektron yang dihasilkan itu masuk ke pita
konduksi maka elektron-elektron itu akan mengalir ke arah positif sumber
tegangan sedangkan hole yang dihasilkan mengalir ke arah negatif sumber
tegangan sehingga arus akan mengalir di dalam rangkaian. Besarnya pasangan
elektron ataupun hole yang dihasilkan tergantung dari besarnya intensitas cahaya
yang diserap oleh photodiode. sumber: http://ini-robot.blogspot.com/2011/11.
2.7 WAVECOM M1306B
1996 Wavecom mulai membuat desain daripada modul wireless GSM pertamanya dan diresmikan pada 1997, bentuk modul GSM pertama berbasis GSM dan pengkodean khusus yang disebut AT-command. Sulit mencari referensi module tipe apa yang pertama dibuat oleh Wavecom SA.
Modem Wavecom tipe M1306B ini merupakan modem yang dapat digunakan dalam SMS Gateway. Fisik dari Wavecom tipe M1306B ukurannya lebih kecil dan pendek dari pada wavecom tipe M1206B. Selain itu antena standar pada tipe M1306B berupa antenna l, dan adaptornya berupa colokan bulat.
Dalam Wavecom tipe M1306B ini motherboard chipset designnya standar dan tidak sedikit tahan panas. Dalam Modem wavecom M1306B ini harganya sedikit mahal dibandingkan dengan tipe wavecom M1206B. Adaptor pada modem wavecom tipe M1306B dapat diganti dengan adaptor nokia, karena pada dasarnya adaptor nokia sama dengan adaptor di modem wavecom tipe M1306B.
Di bawah ini merupakan modem Wavecom Fastrack tipe M1306B beserta perangkatnya yang ditunjukkan pada Gambar 2.10.
2.8 RTC DS1307
Real Time Clock (RTC) merupakan suatu chip (IC) yang memiliki fungsi sebagai penyimpanan waktu dan tanggal. RTC DS1307 merupakan Real Time Clock (RTC) menggunakan jalur parallel yang dapat menyimpan data-data detik, menit, jam, tanggal, bulan, hari dalam seminggu, dan tahun valid hingga 2100.
RTC DS1307 merupakan Real Time Clock (RTC) menggunakan jalur paralel yang memiliki antarmuka serial Two-wire (I2C), sinyal luaran gelombang kotak terprogram (Programmable Squarewave), deteksi otomatis kegagalannya (Power-Fail) dan rangkaian switch, konsumsi daya kurang dari 500nA menggunakan mode baterai cadangan dengan operasional osilator. Tersedia fitur industri dengan ketahanan suhu -40°C hingga +85°C. Tersedia dalam kemasan 8 pin DIP atau SOIC.
Gambar 2.11. RTC DS1307. Sedangkan daftar pin DS1307 adalah sebagai berikut 1. Vcc : Primary Power Supoly
2. X1, X2 : 32.768kHz Crystal Connection 3. VBAT : +3V baterai input
5. SDA : Serial Data 6. SCL : Serial Clock
7. SQW/Out : Square Wave/Output Driver
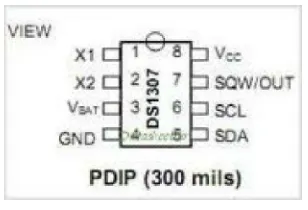
Berikut adalah Gambar diagram pin DS1307
Gambar 2.12. Pin RTC DS1307.
Untuk masing-masing pin akan dijelaskan sebagai berikut
1. X1 merupakan pin yang digunakan untuk dihubungkan dengan X2.
2. X2 berfungsi sebagai keluaran/output dari crystal yang digunakan dan terhubung juga dengan X1.
3. VBAT merupakan backup supply serial RTC dalam menjalankan fungsi
5. SDA berfungsi sebagai masukan/keluaran (I/O) untuk I2C serial interface. Pin ini bersifat open drain. Oleh sebab itu menggunakan external pull up resistor.
6. SCL berfungsi sebagai clock untuk input ke I2C dan digunakan untuk mensinkronisasi pergerakan data dalam serial interface. Bersifat open drain, oleh sebab itu membutuhkan external pull up resistor.
7. SWQ/OUT sebagai squafe wave/ outout driver. Jika diaktifkan, maka akan menjadi 4 frekuensi gelombang kotak yaitu 1kHz, 4kHz, 8kHz, 32kHz. Sifat dari pin ini sama dengan sifat pin SDA dan SCL sehingga membutuhkan external pull up resistor. Dapat dioperasikan dengan VCC maupun dengan VBAT.
8. VCC merupakan sumber tegangan utama. Jika sumber tegangan terhubung
dengan baik, maka pengaksesan data dan pembacaan data dapat dilakukan dengan baik. Namun jika backup supply terhubung juga dengan VCC,
namun besar VCC di bawah VTP, maka pengaksesan data tidak dapat
dilakukan.
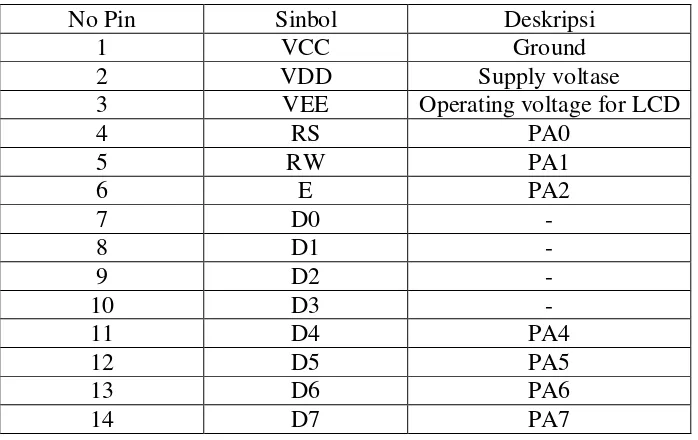
2.9 LCD 16X2 Char acter
Gambar 2.13. LCD 16x2 karakter.
Tabel 2.5. Karakteristik pin LCD.
No Pin Sinbol Deskripsi
2.10 ADC (Analaog to Digital Converter) ATmega16A
maupun defferential input. Selain itu, ADC ATMega16 memiliki konfigurasi pewaktuan, tegangan referensi, mode operasi, dan kemampuan filter sehingga dapat dengan mudah disesuaikan dengan kebutuhan dari ADC itu sendiri. Proses inisialisasi ADC meliputi proses penentuan clock, tegangan referensi, format data keluaran dan mode pembacaan. Register yang perlu diset nilainya adalah ADMUX (ADC Multiplier Selection Register), ADCSRA (ADC Control and Status Register A) dan SFIOR (Special Function IO Register). ADMUX merupakan register 8 bit yang berfungsi menentukan tegangan referensi ADC, format data keluaran dan saluran ADC yang digunakan.
2.11 Kebutuhan Software
Pada Kebutuhan software terkait dengan pemrograman banyak macamnya yang digunakan antara lain, BASCOM-AVR, BASCOM-8051, Pinneacle, dan CodeVisionAVR . Penulis menggunakan pemrograman Bahasa C yaitu software CodeVisionAVR dalam Alat Pengendali Pemberi Pakan Ikan Otomatis dengan SMS Gateway berbasis mikrokontroler, dan untuk menanamkan software yang telah dibuat dalam bahasa pemograman pada mikrokontroler adalah ISIS Proteus. Dari program yang telah dibuat yaitu dari CodeVisionAVR akan ditanamkan dalam mikrokontroler ATmega16A. Dengan kabel data serial yang digunakan untuk mendeteksi data yang masuk pada mikrokontroler.
2.12 CodeVisionAVR
CodeVisionAVR adalah sebuah compiler C yang telah dilengkapi dengan fasilitas integrated development environment (IDE) dan didesain agar dapat menghasilkan kode program secara otomatis untuk mikrokontroler Atmel AVR. Program ini dapat berjalan dengan menggunakan system operasi windows 2000, xp, vista dan windows 7. Integrated Development Environment (IDE) telah dilengkapi dengan fasilitas pemrograman chip melalui metode In-System Progamming, sehingga dapat secara otomatis mentransfer file ke dalam chip mikrokontroler AVR setelah sukses dikompilasi.
Software In-System Programmer didesain untuk bekerja ketika dihubungkan dengan development board STK500, STK600, AVRISP, AVRISP mkII, AVR Dragon, AVRProg(AVR910 (Application Note), Atmel JTAGICE mkII, kanda system SKT200+SKT300, dontronics DT006, vogel elektronik VTEC-SIP, futurlec JRAVR and microtronics ATCPU, dan mega 2000. CodeVIsionAVR dapat menghasilkan kode program secara otomatis melalui fasilitas CodeWizardAVR Automatic Program Generator.Dengan adanya fasilitas ini maka penulisan program dapat dilakukan dengan cepat dan lebih efisien. Seluruh kode dapat diimplementasikan dengan fungsi sebagai berikut:
a. Identifikasi sunber reset.
b. Mengatur akses memori eksternal, c. Inisialisasi port input/output. d. Inisialisasi interupsi eksternal.
e. Inisialisasi timer/counter dan watchdog timer.
h. Inisialisasi interface SPI dan two wire interface (TWI). i. Inisialisasi interface CAN.
j. Inisialisasi I²C Bus, sensor suhu LM75, teherometer/thermostat DS1621 dan real time clock PCF8563, PCF8583, DS1302, DS1307.
k. Inisialisasi 1 wire bus dan sensor suhu DS1820/DS18S20. l. Inisialisasi modul LCD.
Sumber: Syahban Rangkuti, 2011.
2.12.1 Bagian-bagian CodeVisionAVR C Compiler
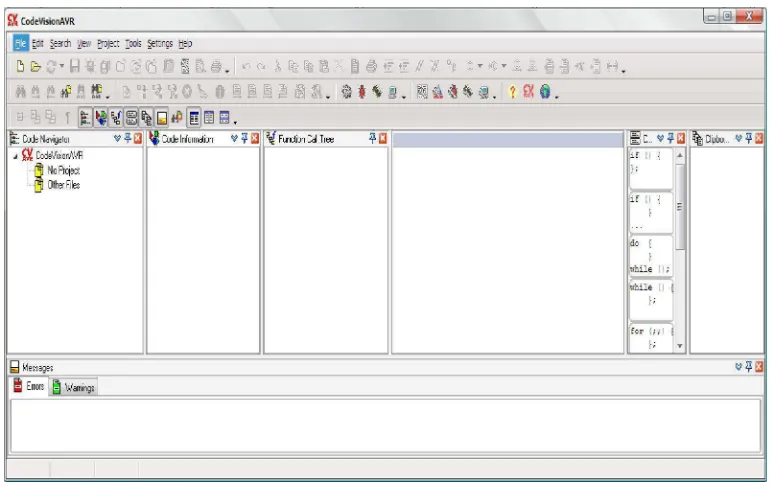
Ketika program CodeVisionAVR C Compiler dijalankan dengan klik ganda ikon CodeVisionAVR C Compiler, maka berikut akan tampil bentuk .exe tampilannya.
Gambar 2.14. Tampilan awal CodeVision AVR.
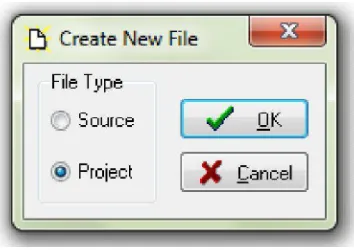
Gambar 2.15. Tampilan Project Baru.
Pilih Project kemudian tekan OK, maka akan muncul kotak dialog berikut.
Gambar 2.16. Tampilan Code Wizard AVR.
Pilih Yes untuk menggunakan CodeWizardAVR.
Gambar 2.17. Jenis Mikrokontroler Yang Dipakai. 2.12.2 Pemilihan Chip dan Frekwensi Xtall
Langkah pertama dalam menggunakan cvAVR adalah membentuk sebuah project baru, dengan click create new project maka akan muncul pertanyaan apakah anda ingin memanfaatkan bantuan code wizard, pilih saja ok maka anda akan masuk pada code wizard. Langkah pertama yang harus dilakukan pada code wizard adalah memilih jenis chip mikrokontroller yang digunakan dalam project dan frekwensi xtall yang digunakan. Pemilihan chip dan frekwensi xtall dapat dilihat seperti pada Gambar 2.18.
2.12.3 Inisialisasi LCD Port I/O
Inisialisasi LCD Port berfungsi untuk memilih fungsi port sebagai input atau sebagai output. Pada konfigurasi port sebagai output dapat dipilih pada saat awal setelah reset kondisi port berlogika 1 atau 0, sedangkan pada konfigurasi port sebagi input terdapat dua pilihan yaitu kondisi pin input toggle state atau pull-up, maka sebaiknya dipilih pull up untuk memberi default pada input selalu berlogika 1. setiap port berjumlah 8 bit, konfigurasi dari port dapat diatur sesuai dengan kebutuhan. Pengaturan konfigurasi dapat dilakukan perbit, jadi dalam satu port dapat difungsikan sebagi input dan output dengan nilai default nya berbeda-beda.
Gambar 2.19. Inisialisasi LCD Port I/O.
selanjutnya pada menu File, pilih Generate, Save and Exit dan simpan pada direktori yang diinginkan.
Sumber: http://www.musbikhin.com/codevision-avr-c-compiler. 2.13 DT-HiQ AVR-51 USB ISP
merupakan in-system programmer yang dapat dihubungkan ke komputer melalui port USB untuk memprogram mikrokontroler keluarga AVR® 8 bit RISC dan MCS-51® yang memiliki fitur ISP. Produk ini dapat bekerja dengan perangkat lunak yang mendukung protokol ATMEL AVRISP MKII seperti AVR Studio©, CodeVisionAVR©, AVRDUDE (WinAVR) dan BASCOM-AVR© untuk memprogram mikrokontroler AVR. DT-HiQ AVR-51 USB ISP [versi mkII] juga dilengkapi dengan perangkat lunak berbasis Windows® yang menyediakan antarmuka yang sederhana dan mudah untuk memprogram mikrokontroler keluarga MCS-51 seri AT89.
Dimensi pada DT-HIQ AVR-51 USB ISP panjang 6,6 cm, lebar 4,1 cm, tinggi 1,5 cm, dan panjang kabel ISP ±10 cm.
Spesifikasi :
1. Dapat digunakan untuk semua tipe AVR® 8 bit RISC dan mikrokontroler MCS-51® seri AT89 yang memiliki fitur ISP.
2. IC yang didukung : a. Keluarga AVR
AT89LP2052, AT89S2051, AT89S51, AT89S53, AT89S8252, AT89S8253, AT89LP4052, AT89S4051, AT89S52, AT89LS53, AT89LS8252
3. Antarmuka USB ke komputer.
4. Beroperasi pada tegangan target 2,7V sampai 5,5V.
5. Mengambil suplai daya dari target board dengan kebutuhan arus maksimum 50 mA @ 5,5 V, sehingga aman bagi komputer jika terjadi hubungan singkat pada target board.
6. Menggunakan protokol ATMEL AVRISP MKII untuk mikrokontroler AVR® 8 bit RISC.
7. Mendukung Flash, EEPROM, Lock Bit, Fuse Bit Programming, dan mendukung file format Intel HEX atau BIN serta dilengkapi perangkat lunak berbasis Windows® untuk keluarga mikrokontroller MCS-51 seri AT89.
8. Tersedia 2 pilihan konektor ISP (5x2) standar ATMEL untuk target board dengan mikrokontroler keluarga AVR dan MCS-51.
9. Tersedia USB driver yang kompatibel dengan Windows® XP/Vista/Win7. 10. Enclosure berbahan logam.
11. Dilengkapi indikator untuk power dan status dengan warna yang berbeda. 12. Dilengkapi soket konverter DT-HiQ AVR ISP 10 to 6 Converter untuk
menghubungkan AVR in-system programmer berkonektor 10 pin ke target board berkonektor ISP 6 pin.
Gambar 2.20. DT-HiQ AVR ISP.
2.14 ISIS PROTEUS
Proteus merupakan program ISIS. Dengan program ini maka skematik rangkaian elektronik dapat dirancang serta disimulasikan dan dibuat menjadi layout PCB. ISIS singkatan dari Intelligent Schematic Input System dan merupakan salah satu program simulasi yan terintergasi dengan Proteus dan menjadi program utamanya. ISIS dirancang sebagai media untuk menggambar skematik rangkaian elektronik yang sesuai dengan standart internasional. Dalam ISIS juga dimasukkan sebuah program ProSPICE yang berguna untuk menyimulasikan skematik rangkaian, sehingga ISIS dapat menjadi program simulator rangkaian elektonika yang interaktif. ProSPICE dirancang berdasarkan standart bahasa pemrograman SPICE3F5, sehingga mampu mensimulasikan rangkaian gabungan dari komponen analog dan digital secara interaktif yang dikenal dengan istilah Interactive Mixed Mode Circuit Simulator.
ISIS dapat mensimulasikan berbagai komponen mikroprosesor dan mikrokontroler. ISIS dapat menyimulasikan berbagai jenis mikroprosesor dan mikrokontroler, termasuk mikrokontroler keluarga AVR.
Diharapkan dengan menggunakan program simulasi ini maka perancangan rangkaian berbasis mikrokontroler dapat lebih mudah dilakukan serta mengurangi biaya produksi dan menghemat waktu. ISIS dilengkapi program compiler, sehingga dapat mengompilasi file kode sumber seperti Assembly menjasi file HEX sehingga nantinya dapat digunakan oleh mikrokontroler yang sebenarnya. Mikrokontroler AVR adalah perangkat keras yang dapat deprogram cara kerjanya dan dapat digunakan untuk berbagai keperluan. Mikrokontroler AVR mempunyai aturan-aturan serta bahasa pemrograman yang khusus, makaada baiknya dalam mempelajari cara kerja dan fungsi dari mikrokontroler ini penulis menggunakan program simulasi mikrokontroler ISIS. Syahban Rangkuti, 2011.
Gambar 2.22. ATMEGA3585 di Program Proteus. 2.15 AT Command
AT-Command adalah perintah yang dapat diberikan kepada handphone atau GSM/CDMA modem untuk melakukan sesuatu hal, termasuk untuk mengirim dan menerima SMS. Dengan memprogram pemberian perintah ini di dalam komputer/mikrokontroler maka perangkat kita dapat melakukan pengirim atau penerimaan SMS secara otomatis untuk mencapai tujuan tertentu.
Pada sistem yang dibuat untuk pengontrolan pakan ikan terdapat perintah yang digunakan yang dijelaskan pada Tabel 2.6.
Tabel 2.6. Perintah AT Command.
AT COMMAND Keterangan
AT Mengecek apakah telepon seluluer telah terhubung AT+CMGF Menetapkan format mode dari terminal
AT+CSCS Menetapkan jenis encoding
AT+CNMI Mendeteksi pesan SMS baru masuk secara otomatis AT+CPMS Menentukan pembacaan pesan di memori atau SIM Card AT+CMGS Mengirim pesan SMS
AT+CMGR Membaca pesan SMS
AT+CMGD Menghapus pesan SMS AT+CSCB Memilih broadcast message AT+CSMS Memilih tipe message service AT+CMGC Mengirim SMS command AT+CMSS Mengirim SMS dari memori
AT+CMMA Acknowledgment SMS directly output AT+CPMS Memilih memori SMS
AT+CSCA Alamat SMS service centre
AT+CMGL Membuka daftar SMS yang ada pada SIM Card
Sumber : Muhammad Resna, 2010. 2.16 Sejarah SMS
Short Message Service (disingkat SMS) atau layanan pesan singkat adalah sebuah layanan yang dilaksanakan dengan sebuah telepon seluler untuk mengirim atau menerima pesan-pesan pendek. Pada mulanya SMS dirancang sebagai bagian dari Global Sistem for Mobile communication (GSM), tetapi sekarang sudah didapatkan pada jaringan bergerak lainnya termasuk jaringan Universal Mobile Telecommunications Sistem (UMTS) Sumber : Ferdian Suria, 2011.
pelayanan komunakasi mobile yang dimulai pada awal tahun 1980-an. Para pakar dari komunitas tersebut menyumbangkan pemikiran di ajang diskusi. Sebagian besar dari mereka menginginkan SMS sebagai alat pemberitahuan, seperti pemberitahuan incoming voice mail. Tetapi ada juga yang menginginkannya sebagai telemetry. Tetapi hanya sedikit yang menyakini SMS akan dipakai sebagai alat untuk mengirim pesan teks ke antar pengguna mobile.
Pada awal bulan Februari tahun 1985, setelah didiskusikan dengan sub group dari GSM, yaitu WP3, dipimpin oleh J Audestad, SMS dipertimbangkan di grup utama GSM sebagai layanan baru di sistem seluler digital. Di dokumen GSM tentang layanan dan fasilitas yang disediakan oleh sistem GSM (GSM Doc 28/85 rev2, Juni 1985). Baik di mobile originated maupun di mobile terminated, termasuk point-to-point dan point-to-multipoint, pesan singkat hadir di teleservice sistem GSM.
SMS komersial pertama dikirim pada tanggal 3 Desember 1992 dari sebuah personal komputer (PC) oleh Neil Papworth dari Sema Group kepada Richard Jarvis di jaringan GSM Vodafone di Inggris. SMS pada mulanya dirancang untuk jaringan GSM, tetapi sekarang hadir di berbagai jaringan, termasuk jaringan 3G. Meskipun demikian, tidak semua pesan teks menggunakan SMS. Di Jepang dikenal dengan sebutan Skymail, produk J.Phone dan Short Mail produk dari NTT Docomo. Sumber : Ferdian Suria, 2011.
2.17 SMS GATEWAY
melalui SMS Gateway’s shortcode (sbg contoh 9221). SMS Gateway membolehkan UEA untuk berkomunikasi dengan Telco SMSC (telkomsel, indosat, dll) atau SMS platform untuk menghantar dan menerima pesan SMS dengan sangat mudah, Karena SMS Gateway akan melakukan semua proses dan koneksi dengan Telco. SMS Gateway juga menyediakan UEA dengan interface yang mudah dan standar.
UEA dapat berupa berbagai aplikasi yang memerlukan penggunaan SMS. Seperti berbagai aplikasi web yang telah banyak menggunakan SMS (free SMS, pendaftaran, konfirmasi melalui SMS, aplikasi perkantoran, dsb), CMS, acara pengundian di televisi, dll.UEA melakukan komunikasi dengan SMS Gateway melalui Internet menggunakan standard HTTP GET atau HTTPS (untuk komunikasi yang aman). Telco SMSC akan menghantar pesan (SMS) tersebut kepada perusahaan SMS Gateway (sesuai dengan nomor yang telah disewa) dengan menggunakan protokol yang khusus.
Dan berdasarkan keyword yang telah dituliskan pada SMS, maka sistem SMS Gateway akan menghantar SMS tersebut ke URL yang telah ditentukan. UEA dapat menghantar SMS reply kepada pelanggan melalui SMS Gateway tersebut. Dan UEA dapat menentukan besarnya biaya (charging) yang akan dikenakan kepada pelanggan. Biasanya telah ditentukan regulasi biayanya (microcharging mechanism), contoh Rp 0 (gratis); Rp 500,- ; Rp 1000,- ; Rp2000,- dst.
a. Keuntungan SMS Gateway
ke ratusan nomor secara otomatis dan cepat yang langsung terhubung dengan database nomor-nomor ponsel saja tanpa harus mengetik ratusan nomor dan pesan di ponsel anda karena semua nomor akan diambil secara otomatis dari Database tersebut.
Selain itu, dengan adanya SMS Gateway anda dapat mengustomisasi pesan-pesan yang ingin dikirim. Dengan menggunakan program tambahan yang dapat dibuat sendiri, pengirim pesan dapat lebih fleksibel dalam mengirim berita karena biasanya pesan yang ingin dikirim berbeda-beda untuk masing-masing penerimanya.
b. Kebutuhan SMS Gateway
Untuk kebutuhan SMS Gateway tidak terlalu berlebihan dan juga fleksibel karena bisa dibuat dengan
1. PC maupun Notebook. Yang mutlak dibutuhkan adalah sebuah komputer,
2. sebuah ponsel dengan
3. kabel data (Kabel berantarmuka serial yang dapat menghubungi ponsel dengan PC) atau dapat munggunakan InfraRed dan piranti lunak sebagai SMS Gateway.
Untuk menggunakan Infrared anda membutuhkan sebuah ponsel yang juga memiliki fasilitas tsb, tapi tidak dianjurkan untuk kebutuhan SMS gateway karena komunikasi dengan Infrared tidak terlalu baik (jika tergeser gampang putus).
ANALISA DAN PERANCANGAN SISTEM
Pada bab ini merupakan bagian perancangan dan bagian pembuatan perangkat lunak (software) dan perangkat keras (hardware), yang dibahas tentang langkah-langkah perencanaan dan pembuatan tugas akhir, yang merupakan pokok bahasan utama dalam pembuatan tugas akhir ini.
3.1 Perancangan
Dalam pembuatan Alat Pengendali Pemberi Pakan Ikan Otomatis dengan SMS Gateway Berbasis Mikrokontroler ini perlu diperhatikan beberapa aspek yang dibutuhkan, yaitu:
3.1.1 Miniatur Pakan Ikan
Gambar 3.1. Miniatur Pakan Ikan.
3.1.2 Pemberian Pakan Ikan
Dalam hal pemberian pakan perlu diperhatikan aspek-aspek yang dibutuhkan, yaitu :
a. Sistem ini dirancang agar dapat memberikan pakan ikan secara otomatis disaat pemilik tidak berada di rumah.
b. Sistem ini dirancang agar jadwal pemberian pakan bisa diatur oleh pemilik melalui tombol push button.
d. Sistem ini dirancang menggunakan sensor photodiode jika pakan ikan yang berada diwadah akan habis maka akan mengirimkan SMS Gateway melalui modem wavecom.
3.2 Deskr ipsi Sistem
Pada bab ini, dibuat parancangan dan pembuatan dari Alat Pengendali Pemberi Pakan Ikan Otomatis dengan SMS Gateway Berbasis Mikrokontroler. Bagian pembuatan perangkat lunak meliputi pemrograman CodeVisionAVR C Compiler pada mikrokontroler, sedangkan untuk bagian pembuatan perangkat keras yang meliputi perangkat mekanik serta perangkat elektronik. Pembuatan perangkat mekanik terdiri dari desain mengenai miniatur itu sendiri yaitu pembuatan miniatur wadah pakan ikan. Sedangkan pembuatan perangkat keras elektronik terdiri dari pembuatan rangkaian sistem mikrokontroler, rangkaian infrared, sensor photodiode, dan motor solenoid.
3.3 Peracangan Sistem
Sub bab ini menjelaskan mengenai proses desain perangkat lunak yang akan dibuat dan hardware yang digunakan. Proses desain sistem dalam sub bab ini akan dibagi menjadi beberapa tahap yaitu: alur umum sistem, spesifikasi kebutuhan sistem, alur umum, flowchart, dan perancangan hardware.
Aplikasi ini merupakan sistem yang bisa mempermudah pemilik ikan. Dimana para pemilik ikan tersebut bisa mengatur waktu pemberian pakan secara komputerisasi.Mekanisme dan Sistem pengendalian pakan ikan:
2) Inputkan nilai photodiode dan waktu yang anda inginkan melalui push button agar pakan ikan tersebut terbuka sesuai waktu yang telah ditentukan.
3) Setelah selesai menginputkan pakan ikan tersebut sudah bisa digunakan.
3.3.1 Alur Umum Sistem
Pada rancangan umum dari aplikasi ini adalah memudahkan pemberian pakan. Pembuatan alat pengendali pemberi pakan ikan otomatis ini dengan pengoperasian berbasis mikrokontroler ATmega16A terdiri dari 2 bagian yaitu: pembuatan perangkat keras (hardware) dan perangkat lunak (software).Gambar umum tugas akhir ini dapat dilihat dari Gambar 3.2.
Gambar 3.2. Diagram sistem alur pengendalian pakan ikan.
photodiode menjadi masukan untuk sistem mikrokontroler Atmega16A, sedangkan keluaran dari mikrokontroler yang tidak lain sebagai penanganan dini yaitu motor solenoid, infrared, serial dan LCD. Sistem kerja dari sistem minimum adalah memonitoring waktu untuk memberi pakan ikan yang akan ditampilkan pada LCD. Output mikrokontroler akan bekarja sebagaimana fungsinya jika waktu yang telah ditentukan pada inputan di RTC benar maka motor solenoid akan terbuka dan pakan ikan akan keluar. Jika pakan ikan yang ada pada wadah tersebut akan habis maka infrared akan menembakkan sinar ke sensorphotodiode. Setelah itu sensor photodiode akan memberi perintah ke mikrokontroler dan di teruskan ke serial.
3.3.2 Rangkaian Sistem Minimum ATmega16A
Dalam parancangan rangkaian ATmega16A memerlukan 2 tahap yaitu perancangan sistem minimum ATmega16A ada perancangan downloader. Dalam hal ini downloader dan sistem minimum dibuat secara terpisah. Hal ini bertujuan untuk menghindari kerusakan apabila salah satunya tidak bekerja.
Program ini dapat berjalan dengan menggunakan system operasi windows 2000, xp, vista dan windows 7. Integrated Development Environment (IDE) telah dilengkapi dengan fasilitas pemrograman chip melalui metode In-System Progamming, sehingga dapat secara otomatis mentransfer file ke dalam chip mikrokontroler AVR setelah sukses dikompilasi.
Software In-System Programmer didesain untuk bekerja ketika dihubungkan dengan development board STK500, STK600, AVRISP, AVRISP mkII, AVR Dragon, AVRProg(AVR910 (Application Note), Atmel JTAGICE mkII, kanda system SKT200+SKT300, dontronics DT006, vogelelektronikVTEC-SIP, futurlec JRAVR and microtronics ATCPU, dan mega 2000. CodeVIsionAVR dapat menghasilkan kode program secara otomatis melalui fasilitas CodeWizardAVR Automatic Program Generator.
Mikrokontroler ini memiliki 2 fungsi utama yaitu untuk mengkonversi data analog berupa tegangan dan mengolahannya melalui program sehingga data digital berubah biner yang menghasilkan oleh A/D converter didalam mikrokontroler di tampilkan pada LCD. Penggunaan masing-masing port I/O mikrokontroler ATmega16A dalam sistem ini adalah sebagai berikut.
a. Port A.0 >input photodiode. b. Port B.0 ...B.1 >input RTC.
c. Port B.2 > output motor solenoid. d. Port C.0 ...C.7 > output LCD 2x16.
Gambar 3.3.Rangkaian Skema ATmega16A.
3.3.3 Rangkaian RTC DS1307
Gambar 3.4.Skema RTC DS1307.
3.3.4 Rangkaian Photodiode
Photodioda merupakan sensor cahaya semikonduktor yang dapat
mengubah besaran cahaya menjadi besaran listrik. Photodioda merupakan sebuah
dioda dengan sambungan p-n yang dipengaruhi cahaya dalam kerjanya. Cahaya
yang dapat dideteksi oleh photodioda ini mulai dari cahaya infra merah, cahaya
tampak, ultra ungu sampai dengan sinar-X. Prinsip kerja, karena photodioda
terbuat dari semikonduktor p-n junction maka cahaya yang diserap oleh
photodioda akan mengakibatkan terjadinya pergeseran foton yang akan
menghasilkan pasangan electron-hole dikedua sisi dari sambungan. Ketika
elektron yang dihasilkan itu masuk ke pita konduksi maka
elektron-elektron itu akan mengalir ke arah positif sumber tegangan sedangkan hole yang
dihasilkan mengalir ke arah negatif sumber tegangan sehingga arus akan mengalir
Gambar 3.5. Photodiode.
3.3.5 Rangkain Push Button
Gambar3.6. Pushbutton.
3.3.6 Cara Merancang Alat
Merancang alat pengendali pemberi pakan ikan otomatis dengan sms Gateway berbasis mikrokontroler bukanlah suatu hal yang mudah dan tidak dapat dilakukan oleh banyak kalangan. Dalam menjalankan Tugas Akhir ini penulis ingin memaparkan bagaimana cara merancang alat atau mesin ini.
Pertama membeli semua komponen-komponen yang diperlukan dalam pembuatan alat pengendali pemberi pakan ikan otomatis ini. Setelah membeli semua komponennya, kemudian mendesain miniaturnya. Kedua setelah mendesain alat, kemudian merakit komponen-komponen yang sudah ada ke PCB (Printed Circuit Board). Setalah itu untuk menyatukan rangkaian komponen diperlukan sebuah akrilik sebagai rangka dari mesin ini.
alat pengendalipemberi pakan ikan otomatis dengan menginputkan waktu yang telah ditentukan.
3.3.7 Analisa Per ancangan Perangkat Keras
Dalam pembuatan alat pengendali pemberi pakan ikan otomatis ini dibutuhkan komponen-komponen sebagai berikut:
1) RTC DS1307
Dalam pembuatan alat pengendali pakan ikan ini menggunakan 1 buah RTC DS1307. Jenis ini dipakai karena mudah diperoleh dipasaran dengan harga yang relatif murah, Real Time Clock (RTC) merupakan suatu chip (IC) yang memiliki fungsi sebagai penyimpanan waktu dan tanggal. RTC DS1307 merupakan Real Time Clock (RTC) menggunakan jalur parallel yang dapat menyimpan data-data detik, menit, jam, tanggal, bulan, hari dalam seminggu, dan tahun valid hingga 2100. RTC DS1307 merupakan Real Time Clock (RTC) menggunakan jalur paralel yang memiliki antarmuka serial Two-wire (I2C), sinyal luaran gelombang kotak terprogram (Programmable Squarewave), deteksi otomatis kegagalannya (Power-Fail) dan rangkaian switch, konsumsi daya kurang dari 500nA menggunakan mode baterai cadangan dengan operasional osilator. Tersedia fitur industri dengan ketahanan suhu -40°C hingga +85°C. Tersedia dalam kemasan 8 pin DIP atau SOIC.
2) LCD 2x16
pergunakan mempunyai lebar display 2 baris 16 kolom atau biasa disebut sebagai LCD Character 2x16, dengan 16 pin konektor. Pada rangkaian ini menggunakan 1 buah LCD sebagai informasi.
3) Infrared
Infra merah (infrared) ialah sinar elektromagnet yang panjang gelombangnya lebih daripada cahaya nampak yaitu di antara 700 nm dan 1 mm. Sinar infra merah merupakan cahaya yang tidak tampak. Jika dilihat dengan dengan spektroskop cahaya maka radiasi cahaya infra merah akan nampak pada spectrum elektromagnet dengan panjang gelombang di atas panjang gelombang cahaya merah. Dengan panjang gelombang ini maka cahaya infra merah ini akan tidak tampak oleh mata namun radiasi panas yang ditimbulkannya masih terasa/dideteksi. Sistem sensor infra merah pada dasarnya menggunakan infra merah sebagai media untuk komunikasi data antara receiver dan transmitter. Sistem akan bekerja jika sinar infra merah yang dipancarkan terhalang oleh suatu benda yang mengakibatkan sinar infra merah tersebut tidak dapat terdeteksi oleh penerima.
4) Photodiode
Photodioda merupakan sensor cahaya semikonduktor yang dapat
mengubah besaran cahaya menjadi besaran listrik. Photodioda
merupakan sebuah dioda dengan sambungan p-n yang dipengaruhi
cahaya dalam kerjanya. Cahaya yang dapat dideteksi oleh photodioda ini
sinar-X. Prinsip kerja pada rangkaian ini sebagai penerima sinyal infrared
yang bertujuan mengirimkan perintah ke modem.
5) Motor Solenoid
Solenoid adalah suatu kumparan kawat panjang dengan suatu pola seperti bentuk sekrup, yang pada umumnya dikelilingi oleh suatu bingkai baja dan mempunyai suatu inti baja di dalam lilitan. Ketika ada aliran arus litrik solenoid menjadi alat elektromagnetik, di mana tenaga elektris diubah jadi pekerjaan mekanis. Inti suatu solenoid pada umumnya dibuat dari dua bagian, suatu pengisap yang dapat dipindahkan, dan suatu penghalang/penopang atau inti akhir yang telah ditetapkan. Efisiensisuatu solenoid adalah suatu faktor dari kekuatan mekanis alat, ketetapan magnetik dan bentuk wujud inti elektrik yang meliputi bagian-bagian dari solenoid yang berupa pengisap/ spekulan dan perubahan/ sarung. Cara kerja pada rangkain ini solenoid dibutuhkan untuk membuka dan menutup pakan ikan sesuai waktu yang telah ditentukan.
6) Mikrokontroler Atmega16A
Mikrokontroler adalah mikroprosesor yang dirancang khusus untuk aplikasi kontrol, dan dilengkapi dengan ROM, RAM dan fasilitas I/O pada satu chip. ATmega16A adalah salah satu anggota dari keluarga ATmega. ATmega16A dirancang oleh Atmel sesuai dengan instruksi standar dan susunan pin 80C5. Fitur-fitur yang dimiliki ATmega16A sebagai berikut:
b. Memiliki memori flash 8 KB, SRAM sebesar 1 kbyte dan EEPROM (Electrically Erasable Programmable Read Only Memory) sebesar 512 byte.
c. Memiliki ADC (Analog Digital Converter) internal dengan ketelitian 10 bit sebanyak 8 saluran.
d. Memiliki PWM (Pulse Wide Modulation) internal sebanyak 4 saluran.
e. Portal komunikasi serial (USART) dengan kecepatan maksimal 2,5 Mbps.
f. Enam pilihan mode sleep, untuk menghemat penggunaan daya listrik.
Dalam pembuatan alat pengendali pakan ikan ini menggunakan mikrokontroler ATmega16A. Jenis mikrokontroler ini dipakai karena mudah diperoleh dipasaran dengan harga yang relatif murah, bisa digunakan untuk berbagai macam keperluan serta mudah memrogramnya karena memiliki fitur ISP (In-System Programming).
7) Relay
8) Push Button
Pushbutton merupakan sebuah device untuk menghubungkan dan memutuskan rangkaian listrik antara 2 titik. Penggunaan pushbutton dikehidupan sehari-hari hampir menyentuh semua bidang. Di bidang komputer dengan keyboard dan mouse, dibidang otomotif dengan panel-panel kontrolnya, bahkan diperalatan rumah tangga sekalipun seperti kontrol peralatan listrik juga menggunakan push button.
9) Catu Daya
Catu daya ini menjelaskan tentang adaptor apa saja yang dapat menyalakan hardwareyang yang bersangkutan dengan sistem ini.Dalam sistem nantinya digunakan adaptor 12V, 2A yang digunakan untuk menjalankan mikrokontroler.
10)Modem WavecomM1306B
Modem wavecom tipe M1306B. Pada Wavecom ini di isi dengan simcard dengan operator seluler IM3 sebagai nomor tujuan untuk mengirimkan pesan. Dalam pembuatan sistem ini digunakan modem Wavecom tipe M1306B yang berfungsi sebagai modem pengiriman sms sebagai laporan jika pakan ikan yang berada pada wadah akan habis.
3.3.8 Analisa Per ancangan Perangkat Lunak
mana sangat diperlukan untuk mengatur kerja dari rangkaian keseluruhan. Pertama – tama yang dibuat adalah program alir (flowchart) dan kemudian akan dilakukan pembuatan program untuk menjalankan sistemnya tersebut.
Pada program ini akan diatur waktu untuk memberi pakan ikan dan mengirimkan pesan kepada pemilik ikan bahwa pakan ikan akan habis melalui modem Wavecom. Pembacaan waktu pemberian pakan ikan tersebut akan ditampilkan. Dimana nantinya akan disambungkan dengan Program yang alirannya telah ditentukan sebelumnya sehingga dapat dijalankan dengan baik. Tanpa adanya Aliran proses dalam bentuk flowchart ini maka pembuatan sistem masih kurang efisien dalam proses implementasinya.
Adapun alur dan cara kerja pada diagram alir gambar 3.7 adalah sebagai berikut yaitu
Pada Gambar 3.8 Flowchart Sistem Kerja Perangkat Lunak Interup untuk pemberitahuan jika pakan akan habis melalui kirim SMS:
Gambar 3.8. Flowchart Interup Jika Pakan Ikan Akan Habis.
Adapun alur dan cara kerja pada diagram alir gambar 3.7 adalah sebagai berikut yaitu jika nilai input daya sama dengan 1 maka melakukan inisialisasi memori, dan RTC melalui tombol push button, bila iya maka proses akan langsung ke setting waktu untuk pemberian pakan ikan jika tidak maka proses akan ke baca RTC, setalah itu proses akan dilanjutkan ke proses selenoid buka dan tutup, lalu proses terakhir adalah mengirimkan SMS ke pemilik pakan ikan untuk pemberitahuan setiap pakan ikan keluar dan akan habis, jika nilai input daya tidak sama dengan 1 maka proses pakan ikan selesai .
Dan penjelasan untuk gambar 3.8 sebagai berikut. Jika photodiode
penerima sinyal infrared dan nilainya sama dengan 1, maka sensor photodiode
akan memberi perintah pada modem untuk mengirim SMS. Dan jika nilai
Gambar 3.9 merupakan lanjutan dari Gambar 3.7 diatas yang menjelaskan tentang aliran proses pada setting waktu pemberian pakan ikan ini dari mulai proses awal hingga akhir proses tersebut.
Adapun alur dan cara kerja pada diagram alir gambar 3.9 adalah sebagai berikut yaitu melakukan setting waktu pakan ikan lalu tekan tombol select jika tombol up sama dengan 1, jika ya alat akan melakukan proses setting timer 1 dan jika tidak proses yang akan dilakukan adalah tombol down. Jika tombol down sama dengan 1, jika ya alat akan melakukan proses setting timer 3 dan jika tidak proses akan kembali ke setting pakan ikan.
Proses setting waktu pakan ikan pada timer 2 setting jam 2 tekan tombol cancel jika ya maka proses akan kembali ke settingan awal jika tidak maka proses akan ke tombol enter. Tekan tombol enter jika tidak maka proses tidak melakukan eksekusi jika ya maka proses akan ke setting menit. Pada setting menit 2 tekan tombol cancel jika ya maka proses akan kembali ke settingan awal jika tidak maka proses akan ke tombol enter. Tekan tombol enter jika tidak maka proses tidak melakukan eksekusi jika ya maka proses akan ke setting detik. Pada setting detik 2 tekan tombol cancel jika ya maka proses akan kembali ke settingan awal jika tidak maka proses akan ke tombol enter. Tekan tombol enter jika tidak maka proses tidak melakukan eksekusi jika ya maka kembali ke sistem awal pakan ikan.
Lanjutan Gambar 3.10. Flowchart Baca RTC.
Gambar 3.10 merupakan lanjutan dari Gambar 3.7 diatas yang menjelaskan tentang aliran proses pada selenoid buka ini dari mulai proses awal hingga akhir proses tersebut.
Lanjutan Gambar 3.11. Flowchart Proses Solenoid Buka dan Tutup.
Gambar 3.12. Flowchart Proses Kirim SMS.
IMPLEMENTASI SISTEM
Pada bab ini akan dibahas mengenai implementasi program dari hasil analisa dan rancangan sistem yang telah dibuat pada bab III, serta bagaimana cara sistem tersebut dijalankan.
4.1 Alat-alat yang Digunakan
Pada bagian ini akan dijelaskan mengenai implementasi program, alat-alat yang digunakan yaitu perangkat keras (hardware) dan perangkat lunak (software) yang dijabarkan sebagai berikut:
4.1.1 Perangkat Keras
Perangkat keras (hardware) yang digunakan adalah:
a. Rangkaian minimum Atmega16A. b. Miniatur pakan ikan.
c. Infrared.
d. Sensor photodiode. e. Motor solenoid. f. Wavecom M1306B. g. LCD 2x16.
h. RTC.
4.1.2 Perangkat Lunak
Perangkat lunak (software) yang digunakan adalah:
a. Windows XP.
b. CodeVisionAVR.exe.
c. Bahasa C sebagai bahasa pemrograman untuk memprogram mikrokontroler.
d. AVR studio.
4.2 Implementasi Hardware
Dalam pembuatan perangkat lunak alat pengendali pemberi pakan ikan otomatis dengan SMS Gateway berbasis mikrokontroler ini dibutuhkan suatu alat yang berguna sebagai peraga sistem yang telah dibuat agar dapat mengetahui cara kerja sistem secara keseluruhan dan untuk memastikan apakah sistem telah berjalan sesuai perancangan, agar hardware dapat bekerja harus terhubung dengan rangkaian mikrokontroler ATmega16A dan komputer. Mikrokontroler ATmega16A sebuah media penyimpanan program yang kita buat. Implementasi mikrokontroler ATmega16A tersebut dapat dilihat pada sub bab sebagai berikut:
4.2.1 Rangkaian Minimum Mikrokontroler ATmega16A
Gambar 4.1. Rangkaian Minimum ATmega16A.
4.2.2 Implementasi Miniatur Pakan Ikan
Pembuatan miniatur alat pengendali pemberi pakan ikan otomatis dengan SMS Gateway berbasis mikrokontroler ini digunakan untuk memberikan simulasi bagaimana cara kerja dari pakan ikan, sehingga dapat diketahui bagaimana kinerja dari alat tersebut jika pada keadaan yang sebenarnya.
Gambar 4.2 Miniatur Pakan Ikan.
4.2.3 Infrared