BAB I
PENDAHULUAN
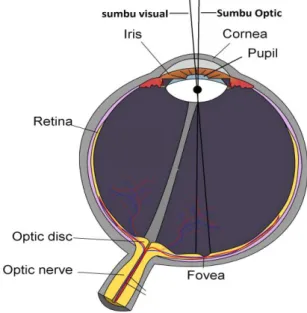
1.1 Latar BelakangDeteksi pandangan pada ruang nyata merupakan proses untuk mengestimasi koordinat 3D (x, y, z) titik pandang terhadap objek yang dilihat dalam satuan fisik. Ketika suatu objek dilihat, mata berorientasi dengan cara tertentu sehingga citra dari objek tersebut bisa jatuh pada fovea dari masing-masing mata. Fovea merupakan wilayah penglihatan yang paling tajam pada retina dan ukurannya berkisar sekitar 0.6-10 terhadap sudut penglihatan [1]. Secara umum, titik pandang merupakan titik potong antara sumbu penglihatan (visual axis) dari dua mata dengan 3D scene. Sumbu penglihatan (visual axis) merupakan garis yang didefinisikan dengan titik simpul yang berada pada tengah fovea, seperti yang ditunjukkan pada Gambar 1.1. Jika scene berupa sebuah bidang (plane), seperti proyeksi layar komputer, titik pandang bisa didefinisikan sebagai perpotongan antara sumbu penglihatan dari mata dengan bidang scene [2].
Sistem deteksi pandangan bisa digunakan dalam berbagai jenis aplikasi yang membutuhkan analisis pola penglihatan manusia. Dalam bidang periklanan dan pemasaran, sistem deteksi pandangan menjanjikan hasil yang lebih optimal dalam mendemonstrasikan fokus dan perhatian (visual attention) dari konsumen ketika melihat berbagai produk komersial [3]. Dalam bidang interaksi manusia dan komputer, sistem deteksi pandangan bisa digunakan sebagai media masukan (input) untuk menunjuk suatu objek tertentu baik di dunia virtual maupun di dunia nyata oleh orang yang tidak mampu bergerak bebas karena menderita kelainan saraf motorik atau kecelakaan pada tulang belakang [4].
Potensi kemanfaatan dari sistem analisis pola penglihatan manusia tersebut di atas membutuhkan tingkat akurasi yang tinggi dari hasil deteksi pandangan. Secara teknis, untuk mendapatkan titik pandang yang akurat, masing-masing mata perlu direpresentasi ke dalam sistem koordinat untuk mendapatkan jarak mata yang ideal sehingga arah pandang dari kedua mata akan bertemu di satu titik [5]. Beberapa penelitian sebelumnya yang masing-masing dilakukan oleh Craig Hennessey dan Peter D Lawrence [6], Lee dkk [7], dan Thomas [8] mengusulkan metode estimasi geometris titik pandang 3D berbasis remote eye
tracker. Remote eye tracker yang digunakan dalam beberapa penelitian di atas
berbasis kamera jarak jauh, sehingga kedua mata peserta eksperimen dapat dideteksi tanpa harus memasang perangkat eye tracker pada kepala peserta eksperimen.
Namun demikian, beberapa penelitian di atas masih mendasarkan penggunaan proyeksi perspective dalam merepresentasikan posisi mata dalam suatu ruang. Penerapan proyeksi perspective menyebabkan jarak antara kedua mata menjadi tidak ideal ketika partisipan berada pada jarak yang jauh dari kamera dan terlalu banyak variabel seperti model mata yang diikut sertakan dalam perhitungan untuk estimasi titik pandang. Hal tersebut bisa menurunkan akurasi pada estimasi kedalaman arah pandang [9]. Untuk mendapatkan titik pandang 3D, koordinat Z yang berhubungan dengan jarak kedalaman perlu diestimasi dengan menggunakan karakter binokuler (binocular) dari mata yakni vergence. Sifat
berada pada jarak yang ideal (disparity) [10].
Penelitian ini mengusulkan sebuah metode estimasi titik pandang 3D dengan proyeksi orthographic untuk merepresentasikan posisi masing-masing mata dalam ruang dunia nyata, sehingga diperoleh jarak antar mata yang ideal. Penelitian dilakukan dengan memanfaatkan Eye Tribe Tracker, sebuah perangkat
remote eye tracker dengan harga terjangkau yang mendukung pengembangan
sistem perangkat lunak berbasis Java atau C++. Dengan mendapatkan jarak antar mata yang ideal, pengukuran pergerakan mata dengan arah berlawanan (vergence) dapat dilakukan secara tepat, sehingga akurasi estimasi titik pandang 3D di ruang nyata meningkat [11].
1.2 Perumusan masalah
Berdasarkan latar belakang yang telah dipaparkan, permasalahan yang melatarbelakangi penelitian ini adalah pemetaan posisi mata kiri dan mata kanan pada ruang nyata dengan menggunakan remote eye tracker berbasis metode
perspective kurang akurat sehingga menurunkan akurasi titik pandang 3D.
1.3 Keaslian penelitian
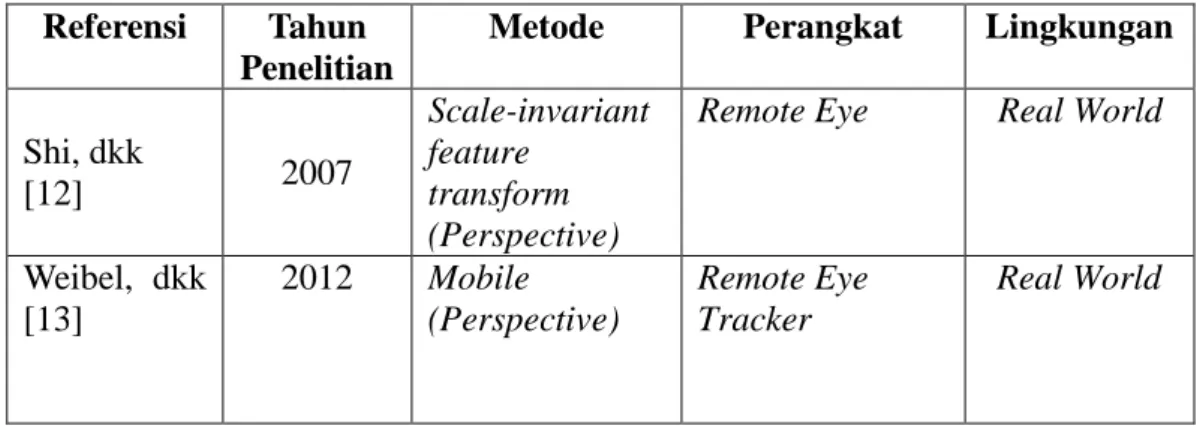
Penelitian ini diawali dengan review paper terkait dengan berbagai metode yang digunakan untuk deteksi pandangan 3D pada ruang nyata dengan perangkat remote eye tracker. Tabel 1.1 menunjukkan perbandingan antara penelitian yang dilakukan penulis dengan penelitian yang telah dilakukan sebelumnya.
Tabel 1.1 Kebaharuan Penelitian Referensi Tahun
Penelitian
Metode Perangkat Lingkungan
Shi, dkk [12] 2007 Scale-invariant feature transform (Perspective)
Remote Eye Real World
Weibel, dkk [13] 2012 Mobile (Perspective) Remote Eye Tracker Real World
Referensi Tahun Penelitian
Metode Perangkat Lingkungan Hennessey dan Jacob [14] 2012 Geometric (Perspective) Remote Eye Tracker Real World Ebisawa dan Fukumoto [15] 2013 Pupil-Corneal Reflection (Perspective) Remote Eye Tracker Real World Funes Mora dan Odobez [16] 2014 Geometic Generative (Perspective) Remote Eye Tracker Real World Penelitian ini 2016 Orthographic Remote Eye Tracker Real World
Shi, dkk [12] mengusulkan sistem deteksi pandangan dengan menggunakan dua kamera untuk mendeteksi objek di depan. metode yang digunakan yakni scale-invariant feature transform (SIFT) berdasarkan proyeksi
perspective untuk deteksi objek. Penelitian tersebut memberikan hasil yang bagus
pada bidang 2D (sumbu x dan y), namun demikian terbatas pada rentang sumbu z dimana akurasinya menurun.
Weibel, dkk [13] mengembangkan sistem eye tracking untuk penelitian observasi deck penerbangan. Metode yang digunakan yakni template matcing berdasarkan proyeksi perspective untuk mengidentifikasi objek yang berada di depan kamera. Sistem ini terbatas pada sudut pandang (viewing angle) yang kecil sehingga menyebabkan akurasi nilai deteksi pada sumbu z menurun.
Hennessey dan Jacob [14] mengembangkan sistem gaze tracking
binocular berdasarkan proyeksi perspective pertama untuk estimasi koordinat X,
Y, Z terhadap target pandangan di ruang nyata 3D. Sistem tersebut menggunakan metode geometri dan mounting kamera untuk mendapatkan vektor pandangan 3D dari masing-masing pupil mata kiri dan mata kanan. Metode tersebut kemudian dikombinasikan dengan metode pan/tilt, sehingga memungkinkan sistem untuk mengikuti pergerakan partisipan. Keunggulan dari sistem ini adalah partisipan tidak diharuskan menggunakan perangkat tertentu, sehingga partisipan merasa nyaman. Namun demikian, sistem ini terbatas pada parameter-parameter geometri
bawah kontrol.
Ebisawa dan Fukumoto [15] menerapkan metode Pupil-Corneal
Reflection (PCR) untuk mendapatkan titik pandang 3D. Kamera yang digunakan
untuk menangkap citra pupil yakni stereo video kamera berbasis perspective dengan bantuan cahaya infrared untuk menerangi mata. Metode yang digunakan mampu mengurangi jumlah kalibrasi sehingga pengguna merasa tidak terbebani (lelah). Namun demikian, rotasi matriks yang berbeda antara frame yang berada pada kamera pendeteksi mata dan frame kamera pendeteksi kepala bisa membiaskan sumbu optik dengan arah pandang sehingga menurunkan akurasi titik pandang 3D.
Mora dan odobez [16] mengusulkan metode untuk estimasi pandangan dengan menggunakan multimodal data Kinect. Arah pandang diperoleh dengan menggunakan Linier Regression (perspective) dari citra mata. Meskipun metode yang digunakan mampu mendeteksi titik pandang 3D, akan tetapi hasil akurasi yang diperoleh terhadap titik koordinat secara keseluruhan (X, Y, Z) masih rendah yakni sekitar 100.
Sebagian besar penelitian tentang deteksi pandangan 3D berdasarkan
remote eye tracker menggunakan metode geometric dan pupil center-corneal reflection untuk mendapatkan point of regard (POG). Metode tersebut masih
menggunakan proyeksi perspective dalam memetakkan posisi mata pada koordinat dunia nyata yang menjadikan ukuran objek mengecil ketika menjauh kamera. Sementara salah satu faktor terbentuknya pandangan yakni adanya proses
vergence. Vergence merupakan pergerakan mata kiri dan mata kanan dalam waktu
yang bersamaan dengan sudut yang sama pada arah yang berbeda [17]. Karena kedua mata berada pada posisi terpisah, diperlukan metode yang mampu memetakkan posisi mata pada suatu ruang dengan posisi yang sebenarnya.
Penelitian ini mengusulkan sebuah metode baru untuk meningkatkan akurasi deteksi posisi pandangan 3D di lingkungan dunia nyata (real world). Dalam hal ini, metode proyeksi orthographic digunakan dalam memetakkan posisi mata kiri dan mata kanan pada dunia nyata dengan menggunakan perangkat
remote eye tracker. Penerapan metode tersebut memungkinkan ukuran interpupilary distance (IPD) atau jarak antar pupil mata kiri dan mata kanan dari
partisipan tidak berubah ketika menjauh atau mendekati kamera, sehingga akurasi dari hasil deteksi titik pandangan 3D tetap stabil meskipun tidak menggunakan perangkat penopang dagu (chin rest).
1.4 Tujuan Penelitian
Penelitian ini bertujuan untuk meningkatkan akurasi deteksi pandangan 3D di dunia nyata dengan menggunakan metode orthographic pada sistem gaze
tracking berbasis remote eye tracker.
1.5 Manfaat Penelitian
Manfaat yang diperoleh dari penelitian ini yaitu:
1). Membantu meningkatkan performa dari aplikasi 3D gaze tracking baik dari segi kebergunaan maupun akurasi.
2). Sebagai bahan acuan untuk melakukan penelitian selanjutnya dalam bidang 3D gaze tracking.
3). Sebagai prototipe awal alat masukan (input) pengendalian kursi roda berbasis pandangan mata.