HASIL DAN PEMBAHASAN
Ekstraksi ciri
Citra yang digunakan dalam penelitian ini berukuran 150 x 150 pixel, sehingga jika divektorkan akan menghasilkan vektor berukuran 22500. Melalui tahap ekstraksi ciri dengan metode 2D-PCA diharapkan dapat memperkecil dimensi vektor yang dihasilkan dengan menghilangkan fitur-fitur citra yang tidak begitu berarti, sehingga proses klasifikasi dapat berjalan lebih cepat. Dengan cara ini juga diharapkan dapat mengurangi noise pada data sehingga klasifikasi dapat menjadi lebih akurat.
Ekstraksi 2D-PCA dilakukan dalam dua tahap dengan pengambilan nilai eigen pada masing-masing tahap sebesar 95%, 90% dan 85%. Hasil yang diperoleh dapat dilihat pada Tabel 2.
Tabel 2. Jumlah fitur/ciri yang diperoleh dengan metode 2D-PCA dua tahap Dari tabel di atas terlihat bahwa metoda 2D-PCA dua tahap yang telah dilakukan cukup berhasil mereduksi dimensi citra yang pada awalnya berukuran 22500 fitur.
Akurasi model
Model yang telah diuji dalam penelitian ini berjumlah 81 model seperti dapat dilihat dari Tabel 1. Pengujian dilakukan menggunakan perangkat lunak Matlab serta library-library nya. Hasil pengujian dan pengukuran akurasi yang telah dilakukan selengkapnya dapat dilihat pada Lampiran 1, dan dirangkum pada
PCA 2D tahap 1 PCA 2D tahp 2
Jml. Fitur Tahap 1 (%) Jml. PC Tahap 2(%) Jml. PC 95 19 95 18 342 95 19 90 10 190 90 10 95 16 160 95 19 85 7 133 90 10 90 9 90 85 6 95 14 84 90 10 85 7 70 85 6 90 8 48 85 6 85 6 36
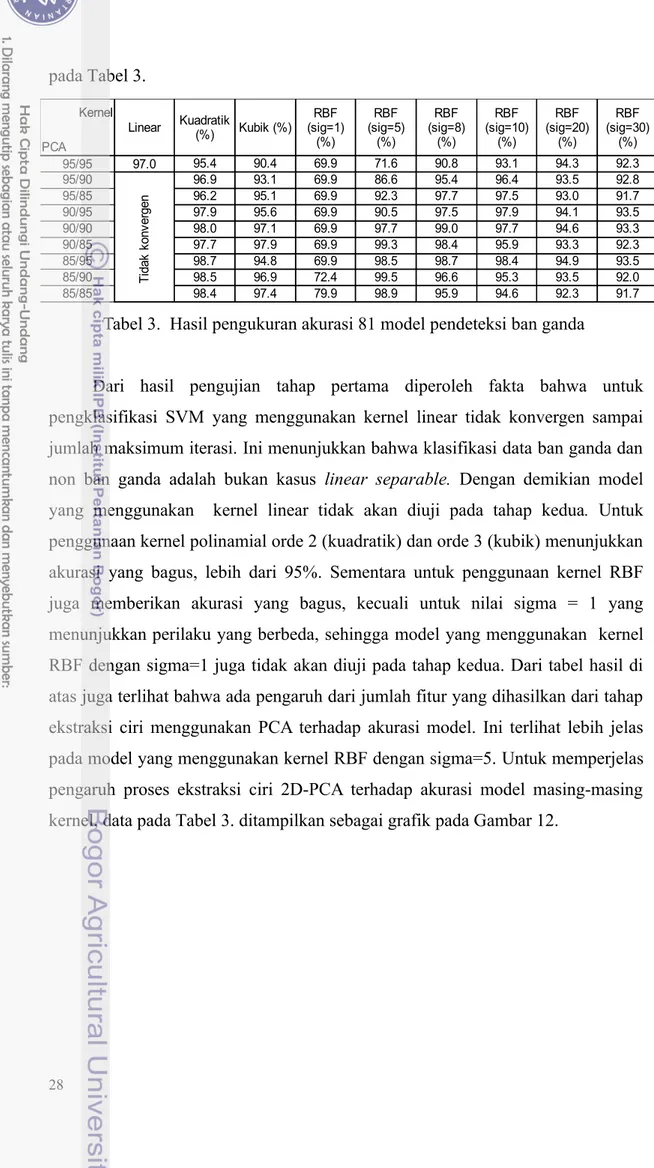
Tabel 3. Hasil pengukuran akurasi 81 model pendeteksi ban ganda
Dari hasil pengujian tahap pertama diperoleh fakta bahwa untuk pengklasifikasi SVM yang menggunakan kernel linear tidak konvergen sampai jumlah maksimum iterasi. Ini menunjukkan bahwa klasifikasi data ban ganda dan non ban ganda adalah bukan kasus linear separable. Dengan demikian model yang menggunakan kernel linear tidak akan diuji pada tahap kedua. Untuk penggunaan kernel polinamial orde 2 (kuadratik) dan orde 3 (kubik) menunjukkan akurasi yang bagus, lebih dari 95%. Sementara untuk penggunaan kernel RBF juga memberikan akurasi yang bagus, kecuali untuk nilai sigma = 1 yang menunjukkan perilaku yang berbeda, sehingga model yang menggunakan kernel RBF dengan sigma=1 juga tidak akan diuji pada tahap kedua. Dari tabel hasil di atas juga terlihat bahwa ada pengaruh dari jumlah fitur yang dihasilkan dari tahap ekstraksi ciri menggunakan PCA terhadap akurasi model. Ini terlihat lebih jelas pada model yang menggunakan kernel RBF dengan sigma=5. Untuk memperjelas pengaruh proses ekstraksi ciri 2D-PCA terhadap akurasi model masing-masing kernel, data pada Tabel 3. ditampilkan sebagai grafik pada Gambar 12.
Kernel Linear Kubik (%) PCA 95/95 97.0 95.4 90.4 69.9 71.6 90.8 93.1 94.3 92.3 95/90 T id ak k on ve rg en 96.9 93.1 69.9 86.6 95.4 96.4 93.5 92.8 95/85 96.2 95.1 69.9 92.3 97.7 97.5 93.0 91.7 90/95 97.9 95.6 69.9 90.5 97.5 97.9 94.1 93.5 90/90 98.0 97.1 69.9 97.7 99.0 97.7 94.6 93.3 90/85 97.7 97.9 69.9 99.3 98.4 95.9 93.3 92.3 85/95 98.7 94.8 69.9 98.5 98.7 98.4 94.9 93.5 85/90 98.5 96.9 72.4 99.5 96.6 95.3 93.5 92.0 85/85 98.4 97.4 79.9 98.9 95.9 94.6 92.3 91.7 Kuadratik (%) RBF (sig=1) (%) RBF (sig=5) (%) RBF (sig=8) (%) RBF (sig=10) (%) RBF (sig=20) (%) RBF (sig=30) (%)
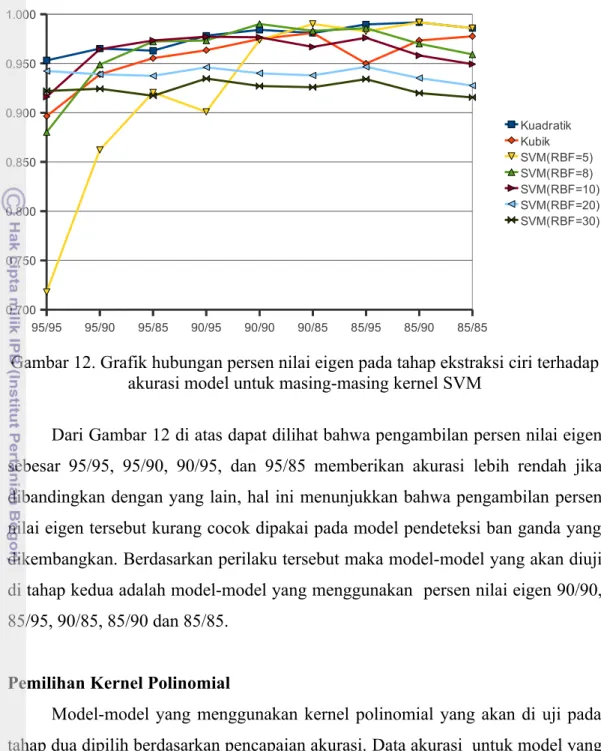
Gambar 12. Grafik hubungan persen nilai eigen pada tahap ekstraksi ciri terhadap akurasi model untuk masing-masing kernel SVM
Dari Gambar 12 di atas dapat dilihat bahwa pengambilan persen nilai eigen sebesar 95/95, 95/90, 90/95, dan 95/85 memberikan akurasi lebih rendah jika dibandingkan dengan yang lain, hal ini menunjukkan bahwa pengambilan persen nilai eigen tersebut kurang cocok dipakai pada model pendeteksi ban ganda yang dikembangkan. Berdasarkan perilaku tersebut maka model-model yang akan diuji di tahap kedua adalah model-model yang menggunakan persen nilai eigen 90/90, 85/95, 90/85, 85/90 dan 85/85.
Pemilihan Kernel Polinomial
Model-model yang menggunakan kernel polinomial yang akan di uji pada tahap dua dipilih berdasarkan pencapaian akurasi. Data akurasi untuk model yang menggunakan kernel polinomial dapat dilihat pada Tabel 4.
Tabel 4. Akurasi model yang menggunakan kernel polinomial
Dengan menggunakan data tersebut kemudian dipilih model yang
95/95 95/90 95/85 90/95 90/90 90/85 85/95 85/90 85/85 0.700 0.750 0.800 0.850 0.900 0.950 1.000 Kuadratik Kubik SVM(RBF=5) SVM(RBF=8) SVM(RBF=10) SVM(RBF=20) SVM(RBF=30) 2D-PCA Kubik (%) Tahap 1 (%) Tahap 2 (%) 90 90 98.0 97.1 85 95 98.7 94.8 90 85 97.7 97.9 85 90 98.5 96.9 85 85 98.5 97.4 Kuadratik (%)
90/90, 85/95, 85/90 dan 85/85 untuk proses 2D-PCA dua tahap. Sedangkan pada saat persen nilai eigen 90/85 kernel kubik pada klasifikasi dengan SVM memberikan akurasi lebih tinggi.
Pemilihan Kernel RBF
Data akurasi untuk model yang menggunakan kernel RBF dapat dilihat pada Tabel 5.
Tabel 5. Nilai akurasi model-model yang menggunakan kernel RBF
Dari Tabel 5 terlihat bahwa untuk PCA 90/90 akurasi tertinggi dicapai pada saat sigma=8, demikian juga saat PCA 85/95. Tetapi untuk PCA 90/85, 85/90 dan 85/85 akurasi terbaik diberikan oleh model yang menggunakan kernel RBF dengan sigma=5. Dengan demikian model-model yang menggunakan kernel RBF yang akan diuji pada tahap dua menggunakan nilai parameter sigma=5 dan sigma=8.
Pengujian Tahap Dua
Dari pemilihan model-model yang telah dilakukan, maka diperoleh sepuluh model pendeteksi terbaik seperti terlihat pada Tabel 6.
Tabel 6 : Model-model pendeteksi ban ganda terpilih
2D-PCA 90/90 69.9 97.7 99.0 97.7 94.6 93.3 85/95 69.9 98.5 98.7 98.4 94.9 93.5 90/85 69.9 99.3 98.4 95.9 93.3 92.3 85/90 72.4 99.5 96.6 95.3 93.5 92.0 85/85 79.9 98.9 95.9 94.6 92.3 91.7 RBF (sig=1) (%) RBF (sig=5) (%) RBF (sig=8) (%) RBF (sig=10) (%) RBF (sig=20) (%) RBF (sig=30) (%) PCA 2D Kernel SVM 1 90 90 Kuadratik 98.4 2 85 95 Kuadratik 99.0 3 90 85 Kubik 98.1 4 85 90 Kuadratik 99.2 5 85 85 Kuadratik 98.6 6 90 90 RBF, sig=8 99.0 7 85 95 RBF, sig=8 98.6 8 90 85 RBF, sig=5 99.0 9 85 90 RBF, sig=5 99.2 10 85 85 RBF, sig=5 98.6 No. Model Akurasi tahap 1 (%) Tahap 1 (%) Tahap 2 (%)
Kesepuluh model tersebut kemudian dicobakan untuk mendeteksi keberadaan ban ganda pada 30 citra yang diambil dengan kamera 640 x 480 pixel dengan skenario pengambilan seperti telah dipaparkan pada tahap pengambilan data. Dari 30 citra yang dicobakan, 15 citra mengandung ban ganda dan 15 citra tidak mengandung ban ganda. Gambar 30 citra uji yang dipergunakan dapat dilihat selengkapnya pada Lampiran 3.
Proses deteksi dilakukan menggunakan teknik sliding window, dimana sebuah jendela detektor berukuran 150 x 150 pixel digerakan di seluruh area yang dimungkinkan terdapat objek ban ganda. Dalam penelitian ini diambil posisi koordinat awal (1,30) dan posisi akhir di (300,170). Jendela detektor digerakkan sejauh 10 pixel, sehingga total detektor yang harus diklasifikasi oleh model berjumlah 450 jendela per citra. Pada Gambar 13 dapat dilihat area pencarian yang dilakukan pada setiap citra uji.
Gambar 13 : Area pencarian ban ganda pada citra uji
Hasil pengujian terhadap sepuluh model terpilih dapat dilihat selengkapnya pada Tabel 7.
keterangan : angka 1 menunjukkan klasifikasi benar dan 0 menunjukkan klasifikasi salah Tabel 7. Hasil pengujian sepuluh model terpilih
Model 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 Akurasi 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0 1 0 0 0 0 0 0 1 0 1 0 0 0.67 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0 0 1 0 1 0 0 1 1 0 1 0 1 1 0.77 3 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0 0 0 1 0 0 0 0 0 0 0 0 0 0 1 0.57 4 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0 0 0 1 0 0 0 0 0 0 0 0 0 1 0 0.57 5 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0.53 6 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0 0 0 1 0 0 0 0 0 1 0 1 1 1 0 0.67 7 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0 0 0 0 0 1 0 0 1 1 1 1 1 1 0.77 8 1 1 1 1 1 0 1 1 1 1 1 1 1 0 1 1 1 1 1 0 0 0 1 1 1 1 1 1 1 1 0.83 9 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0 1 0 1 0 0 1 0 0 1 1 0 0 1 1 0.73 10 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0 1 0 1 0 0 0 0 0 0 0 0 0 0 0 0.57
dihitung dengan perhitungan
Akurasi= jumlah citra yang terklasifikasi dengan baik jumlah total citra yang diklasifikasi
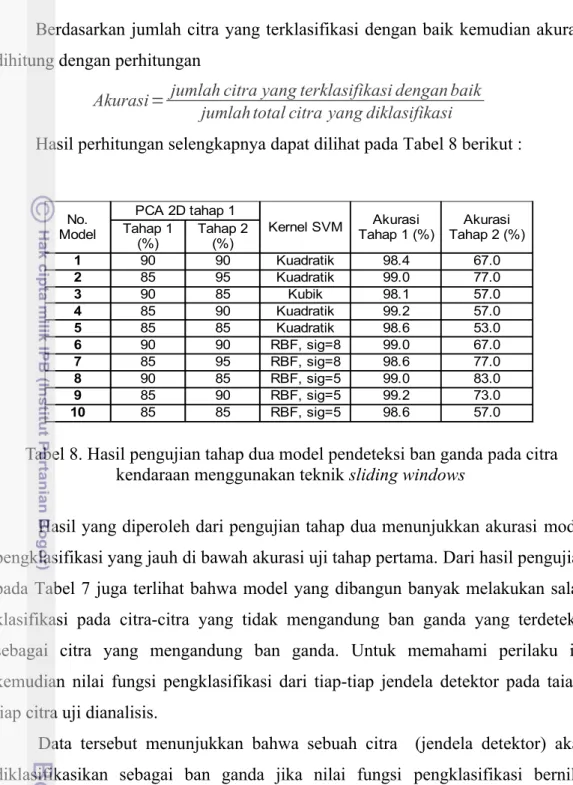
Hasil perhitungan selengkapnya dapat dilihat pada Tabel 8 berikut :
Tabel 8. Hasil pengujian tahap dua model pendeteksi ban ganda pada citra kendaraan menggunakan teknik sliding windows
Hasil yang diperoleh dari pengujian tahap dua menunjukkan akurasi model pengklasifikasi yang jauh di bawah akurasi uji tahap pertama. Dari hasil pengujian pada Tabel 7 juga terlihat bahwa model yang dibangun banyak melakukan salah klasifikasi pada citra-citra yang tidak mengandung ban ganda yang terdeteksi sebagai citra yang mengandung ban ganda. Untuk memahami perilaku ini kemudian nilai fungsi pengklasifikasi dari tiap-tiap jendela detektor pada taiap-tiap citra uji dianalisis.
Data tersebut menunjukkan bahwa sebuah citra (jendela detektor) akan diklasifikasikan sebagai ban ganda jika nilai fungsi pengklasifikasi bernilai negatif (-) dan bukan ban ganda jika positif. Semakin besar nilai negatif menandakan bahwa model semakin yakin bahwa citra tersebut adalah ban ganda. Agar semua citra uji yang tidak mengandung ban ganda diklasifikasi secara benar maka nilai fungsi pengklasifikasi dari semua jendela detektor pada citra-citra uji yang tidak mengandung ban ganda harus bernilai positif. Hal ini dapat dilakukan dengan menambahkan sebuah konstanta (threshold) bernilai positif pada fungsi pengklasifikasi dengan nilai lebih besar dari absolut nilai fungsi pengklasifikasi
PCA 2D tahap 1 Kernel SVM 1 90 90 Kuadratik 98.4 67.0 2 85 95 Kuadratik 99.0 77.0 3 90 85 Kubik 98.1 57.0 4 85 90 Kuadratik 99.2 57.0 5 85 85 Kuadratik 98.6 53.0 6 90 90 RBF, sig=8 99.0 67.0 7 85 95 RBF, sig=8 98.6 77.0 8 90 85 RBF, sig=5 99.0 83.0 9 85 90 RBF, sig=5 99.2 73.0 10 85 85 RBF, sig=5 98.6 57.0 No.
Model Tahap 1 Tahap 1 (%)Akurasi Tahap 2 (%)Akurasi (%) Tahap 2 (%)
paling kecil. Tetapi menambahkan sebuah konstanta positif pada fungsi pengklasifikasi yang terlalu besar dapat menyebabkan nilai fungsi pengklasifikasi pada citra-citra yang mengandung ban ganda semakin besar bahkan mungkin menjadi positif. Jika ini terjadi maka citra yang mengandung ban ganda akan diklasifikasi sebagai citra yang tidak mengandung ban ganda. Dengan demikian perlu dilakukan pemilihan nilai threshold yang memberikan akurasi model paling maksimum.
Pemilihan nilai threshold yang memberikan akurasi maksimum ditentukan oleh nilai fungsi pengklasifikasi paling kecil (minimum) dari jendela detektor pada 30 citra uji. Jika thresholding membuat nilai fungsi dari jendela detektor minimum pada citra uji menjadi positif dapat dipastikan ke 449 jendela detektor yang lain pun akan bernilai positif. Sehingga dipilih sedemikian agar thresholding dapat membuat nilai fungsi minimum dari jendela detektor untuk15 citra yang mengandung ban ganda tetap bernilai negatif, tapi membuat nilai fungsi minimum dari jendela detektor untuk 15 citra yang tidak mengandung ban ganda menjadi positif.
Untuk mempermudah pemilihan nilai threshold, data nilai fungsi minimum untuk 30 citra uji menggunakan masing-masing model diplot dalam sebuah grafik seperti pada Gambar 14. Grafik selengkapnya untuk 10 model pendeteksi dapat dilihat pada Lampiran 4.
Gambar 14 : Grafik nilai fungsi minimum dari masing-masing citra uji tahap 2 menggunakan pengklasifikasi model 1
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 -16 -14 -12 -10 -8 -6 -4 -2 0 2
Pemiliha Trashold Model 1
(Kudratik 90/90)
Ban Ganda Non Ban Ganda
Nomor Citra Uji
N ila i F u n g si P e n g kl a si fik a si
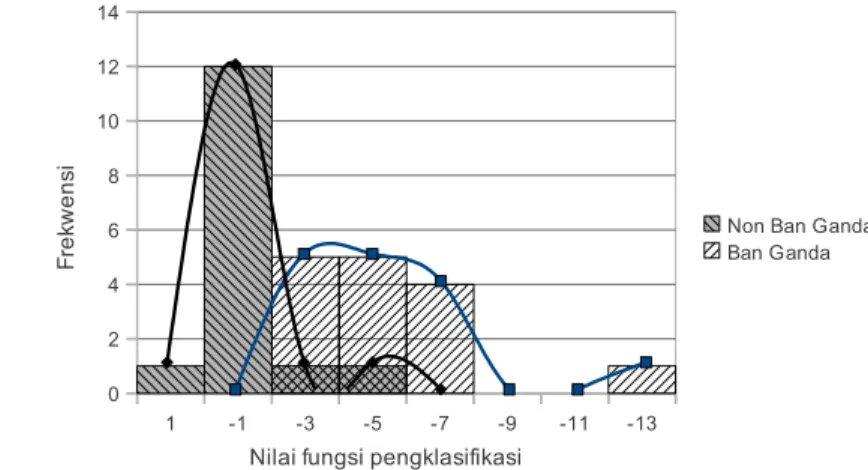
pengklasifikasi sebagai ban ganda adalah citra-citra dengan nilai fungsi pengklasifikasi negatif (nilai fungsi < 0). Tampak bahwa banyak citra non ban ganda (◊) yang diklasifikasikan sebagai ban ganda karena memiliki nilai fungsi negatif. Ini merupakan penyebab rendahnya akurasi model pada pengujian tahap dua. Rendahnya akurasi ini dapat diperbaiki dengan menambahkan sebuah tetapan kepada fungsi pengklasifikasi sehingga pemisahan data ban ganda atau non ban ganda tidak berada pada titik nol tetapi bergeser ke bawah sejauh nilai tetapan yang dipilih. Dengan demikian fungsi pengklasifikasi yang pada awalnya berbentuk f xi=signwT xib menjadi f xi=signwT xibc
dimana c adalah tetapan yang dipilih sedemikian agar akurasi menjadi maksimum. Agar lebih mudah dianalisis, data pada Gambar 14 dapat disajikan dalam bentuk grafik distribusi nilai minimum pengklasifikasi. Untuk keperluan tersebut, data di bagi ke dalam delapan bin kemudian jumlah data pada masing-masing bin dihitung (frekwensi). Hasil perhitungan untuk model 1 dapat dilihat pada Tabel 9.
Tabel 9. Frekwensi nilai fungsi pengklasifikasi dalam delapan bin
Selanjutnya Tabel 9 ditampilkan dalam bentuk grafik distribusi seperti Gambar 15.
Gambar 15 : Grafik ditribusi nila fungsi pengklasifikasi
Bins Frekwensi
Min Max Rataan
0 2 1 0 1 -2 0 -1 0 12 -4 -2 -3 5 1 -6 -4 -5 5 1 -8 -6 -7 4 0 -10 -8 -9 0 0 -12 -10 -11 0 0 -14 -12 -13 1 0 Ban Ganda Non Ban Ganda 1 -1 -3 -5 -7 -9 -11 -13 0 2 4 6 8 10 12 14
Non Ban Ganda Ban Ganda
Nilai fungsi pengklasifikasi
F re kw e n si
Grafik distribusi untuk model-model lain dapat dilihat selengkapnya pada Lampiran 4.
Pemilihan nilai tetapan “c” untuk masing-masing model dilakukan secara inspeksi dan trial-error terhadap grafik nilai fungsi minimum dari masing-masing citra uji tahap 2 untuk masing-masing model pengklasifikasi. Grafik nilai fungsi minimum dari masing-masing citra uji tahap 2 untuk masing-masing model pengklasifikasi selengkapnya dapat dilihat pada Lampiran 4.
Hasil pemilihan nilai c serta akurasi maksimum yang dicapai untuk masing-masing model dapat dilihat pada Tabel 10 berikut.
Tabel 10. Hasil pemilihan nilai threshold dan pengujian tahap dua
Dari Tabel 10 di atas terlihat bahwa kernel RBF dan kuadratik menunjukkan kinerja yang sama baiknya dengan akurasi maksimum 93.3%.
Rata-rata waktu yang diperlukan oleh masing-masing model untuk melakukan satu kali klasifikasi adalah 0.0052 detik. Sehingga untuk melakukan klasifikasi terhadap 450 jendela detektor pada satu gambar diperlukan waktu 2.34 detik. Hasil ini masih jauh dari kebutuhan waktu untuk pemrosesan secara real time. Sebagai perbandingan, untuk kamera denga kecepatan 15 fps, waktu pemrosesan satu frame citra harus lebih kecil 0.067 detik agar bisa berjalan secara real time . PCA 2D Kernel SVM 1 90 90 Kuadratik 67.0 93.3 3.15 2 85 95 Kuadratik 77.0 93.3 1.14 3 90 85 Kubik 57.0 90.0 6.2 4 85 90 Kuadratik 57.0 93.3 1.74 5 85 85 Kuadratik 53.0 86.6 3.14 6 90 90 RBF, sig=8 67.0 93.3 0.46 7 85 95 RBF, sig=8 77.0 93.3 0.64 8 90 85 RBF, sig=5 83.0 83.0 0 9 85 90 RBF, sig=5 73.0 90.0 0.547 10 85 85 RBF, sig=5 57.0 93.3 0.643 No. Model Akurasi sebelum thresholding Akurasi setelah thresholding Nilai c (threshold) Tahap 1 (%) Tahap 2 (%)