1
BAB I
PENDAHULUAN
I.1. Latar Belakang
Kadaster merupakan sistem informasi kepemilikan tanah beserta berbagai hak maupun catatan yang mengikutinya dengan melibatkan deskripsi geometrik dari persil tanah yang terkait (Stoter,2004). Di Indonesia, salah satu tujuan pelaksanaan kadaster yaitu untuk menjamin kepastian hak dari pemilik tanah. Hal tersebut mendorong pemikiran mengenai betapa pentingnya pelaksanaan kadaster di suatu negara.
Seiring pertumbuhan penduduk yang semakin besar, pembangunan semakin gencar pula dilaksanakan. Keterbatasan akan perluasan ruang dalam bentuk dua dimensi mulai beralih pada pemanfaatan ruang atas tanah dan bawah tanah. Indonesia sendiri belum mempunyai peraturan pasti yang mengatur keterkaitan antara administrasi bidang tanah dua dimensi dengan hak atas ruang di atas dan bawah bidang permukaan. Untuk mengakomodasi hal tersebut, studi mengenai kadaster tiga dimensi(3D) menjadi sebuah hal yang penting untuk dilakukan. Salah satu solusi sederhana dalam mewujudkan kadaster 3D adalah pelaksanaan kadaster hybrid, yakni integrasi situasi 3D pada data kadastral 2D yang telah terregistrasi (Stoter, 2004).
Pengukuran kadastral 3D pada prinsipnya dapat mengadopsi metode pengukuran 2D dengan memperhatikan faktor elevasi. Pekerjaan paling awal pada survei kadastral 3D adalah pengadaan titik-titik kerangka dasar pemetaan yang merata di daerah yang akan dipetakan untuk dijadikan ikatan dari detil-detil yang merupakan obyek utama dari kadaster 3D. Kerangka pemetaan kadaster 3D tersebut membutuhkan nilai tinggi yang lebih merepresentasikan bentuk nyata muka bumi yakni tinggi ortometrik dengan referensi bidang geoid untuk kepentingan integrasi database sistem yang teliti dan mempunyai cakupan luas. Salah satu solusi yang dapat memenuhi hal tersebut adalah GPS heighting. GPS heighting melibatkan pengukuran ketinggian ellipsoid dengan GPS, kemudian penerapan reduksi ke bentuk model geoid dan penyesuaian data hasil pengukuran ketinggian ortometrik ke datum vertikal yang ada (Higgins, 2011).
Indonesia mempunyai sistem CORS (Continuously Operating Reference
Station) yang dapat memenuhi kebutuhan akan akuisisi data koordinat dengan cepat.
CORS berupa stasiun base yang melakukan pengamatan selama kontinu dalam 24 jam per hari yang terletak pada kantor Badan Pertanahan Nasional di penjuru daerah. Base
station GPS (GNSS CORS) akan mengirimkan data koreksi melalui internet menuju rover yang melakukan pengamatan dengan metode RTK NTRIP (Network Transported RTCM via Internet Protocol).
Pada pengukuran menggunakan metode GPS RTK NTRIP terdapat berbagai hal yang mempengaruhi ketelitian seperti performa receiver dan transmisi data koreksi melalui jaringan internet (Qu, 2012). Pemilihan dalam penggunaan provider internet seluler dan spesifikasi receiver GPS merupakan variabel yang perlu dipertimbangkan dengan baik untuk mendapatkan hasil yang efisien. Dari banyaknya provider interenet seluler yang beredar, pemilihan provider internet seluler yang mempunyai kualitas jaringan terbaik dibutuhkan agar pengukuran menghasilkan data yang terbaik pula. Adapun mengenai receiver GPS, pemilihan receiver menjadi hal yang penting dilakukan untuk mengetahui kemampuan suatu receiver dalam menghasilkan data yang berkualitas.
Beranjak dari kebutuhan akan pengukuran yang menghasilkan ketelitian maksimal melalui optimalisasi pengukuran GPS RTK NTRIP, maka penelitian ini bertujuan melakukan kajian dari kombinasi variasi provider internet seluler dan spesifikasi receiver yang paling baik untuk keperluan kadastral 3D. Hasil dari penentuan posisi kombinasi optimal tersebut kemudian direduksi menjadi tinggi ortometrik untuk dikaji terkait implementasi keperluan praktis pada kadastral 3D.
I.2. Identifikasi Masalah
Berikut identifikasi masalah yang menjadi dasar pada kegiatan penelitian ini: 1. Belum diketahuinya besar pengaruh variasi provider internet seluler
terhadap hasil ketelitian akuisisi data pengukuran GPS RTK NTRIP pada variasi panjang baseline yang menggunakan CORS BPN Sleman sebagai stasiun base untuk area pengukuran Yogyakarta.
2. Belum diketahuinya besar pengaruh variasi spesifikasi receiver GPS tertentu terhadap hasil ketelitian akuisisi data pengukuran GPS RTK
NTRIP pada variasi panjang baseline yang menggunakan CORS BPN Sleman sebagai stasiun base untuk area pengukuran Yogyakarta.
3. Belum diketahuinya kombinasi optimal dari provider internet seluler dan spesifikasi receiver GPS pada variasi panjang baseline untuk pengukuran kadastral tiga dimensi metode GPS RTK NTRIP dalam sistem tinggi ortometrik.
I.3. Rumusan Masalah
Masalah yang dapat dirumuskan dari kegiatan penelitian ini adalah sebagai berikut:
1. Berapa ketelitian tiga dimensi pengukuran GPS RTK NTRIP terbaik dari variasi provider internet seluler pada variasi panjang baseline yang menggunakan CORS BPN Sleman sebagai stasiun base untuk area pengukuran Yogyakarta?
2. Berapa ketelitian tiga dimensi pengukuran GPS RTK NTRIP terbaik dari variasi spesifikasi receiver GPS pada variasi panjang baseline yang menggunakan CORS BPN Sleman sebagai stasiun base untuk area pengukuran Yogyakarta?
3. Bagaimana kombinasi optimal dari provider internet seluler dan receiver GPS pada variasi panjang baseline untuk pengukuran kadastral tiga dimensi menggunakan metode GPS RTK NTRIP dalam sistem tinggi ortometrik?
I.4. Cakupan Penelitian
Penelitian yang digunakan menggunakan instrumen yang telah ditentukan yakni
receiver GNSS Leica Viva GS08, Trimble Pro-XRT, dan Javad Triumph-1. Sementara provider internet seluler yang digunakan sebatas tiga provider; XL, Indosat, dan
Telkomsel. Lokasi-lokasi pengukuran dipilih secara linier pada wilayah yang berjarak sekitar 5 kilometer, 10 kilometer, 20 kilometer, dan 30 kilometer dari posisi CORS Badan Pertanahan Nasional Kabupaten Sleman.
Data penelitian menggunakan hasil pengukuran RTK NTRIP dengan syarat koreksi satelit yakni dalam kondisi terkoreksi Fixed. Metode analisis yang digunakan adalah perbandingan tingkat kepresisian data, analisis korelasi, dan analisis regresi
linier. Data kemudian dapat dianalisis dari sisi pengaruh kekuatan sinyal rerata yang diperoleh dari penyedia jasa informasi coverage cell. Data tinggi pengukuran (tinggi geometrik) yang telah diidentifikasi sebagai data dengan ketelitian terbaik kemudian direduksi menjadi data tinggi ortometrik menggunakan model geoid lokal Daerah Istimewa Yogyakarta (Wiranata,2016). Selanjutnya hasil perhitungan ketelitian tinggi undulasi diperbandingkan dengan interval kontur peta kadastral sesuai dengan Peraturan Menteri Agraria No. 3 tahun 1997 bahwa peta pendaftaran tanah di daerah pemukiman mempunyai skala 1:1000 atau lebih besar (1:500 dan 1:250).
I.5. Tujuan Penelitian
Tujuan dari dilakukannya kegiatan penelitian ini adalah sebagai berikut:
1. Diperoleh ketelitian tiga dimensi pengukuran GPS RTK NTRIP terbaik dari variasi provider internet seluler pada variasi panjang baseline yang menggunakan CORS BPN Sleman sebagai stasiun base untuk area pengukuran Yogyakarta.
2. Diperoleh ketelitian tiga dimensi pengukuran GPS RTK NTRIP terbaik dari variasi spesifikasi receiver GPS pada variasi panjang baseline yang menggunakan CORS BPN Sleman sebagai stasiun base untuk area pengukuran Yogyakarta.
3. Diperoleh kombinasi optimal terkait provider internet seluler dan spesifikasi receiver GPS untuk pengukuran kadastral 3 dimensi menggunakan metode GPS RTK NTRIP dalam sistem tinggi ortometrik.
I.6. Manfaat Penelitian
Kajian yang dilakukan dari penelitian ini dapat dimanfaatkan sebagai informasi bagi praktisi mengenai kondisi-kondisi yang perlu diperhatikan pada pengukuran GPS metode RTK NTRIP agar menghasilkan ketelitian yang baik. Kegiatan ini juga bermanfaat mengetahui setiap kemampuan dari receiver GPS dan kualitas sinyal
provider internet seluler sehingga berdasarkan hasil tersebut dapat dilakukan
perencanaan yang lebih efisien terkait pengukuran GPS RTK NTRIP. Keluaran utama dari penelitian bermanfaat sebagai salah satu dasar merumuskan SOP (Standard
Operating Procedure) untuk kegiatan kadastaral tiga dimensi dengan penggunaan
I.7. Tinjauan Pustaka
I.7.1. Pemanfaatan GPS RTK NTRIP untuk pemetaan kadastral
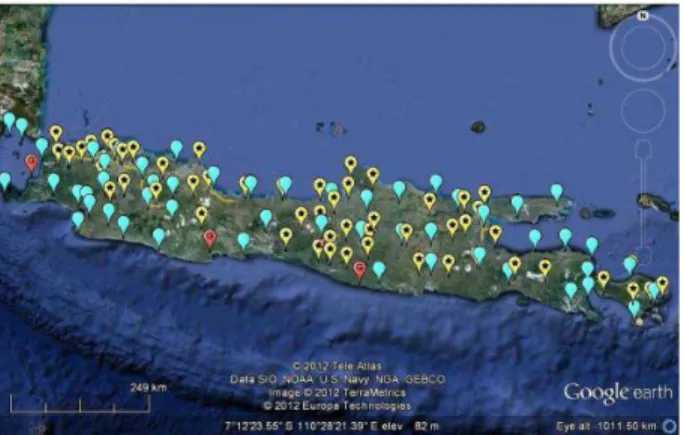
Penggunaan GPS untuk kegiatan kadaster biasanya sebatas untuk pengukuran GPS statik untuk kerangka kontrol pengukuran semata meskipun jaringan CORS telah terbentuk (Abidin, 2012). Kehandalan stasiun GPS CORS BPN sangat tergantung pada hubungan komunikasi antara stasiun base GPS kontinyu dengan pusat pengolahan data(server). Stasiun CORS GPS pada umumnya kini telah terletak di hampir seluruh kantor pertanahan kabupaten Indonesia terutama wilayah jawa. Berikut ini adalah peta persebaran CORS di Indonesia:
Gambar I. 1. Persebaran stasiun CORS di Jawa (BIG: Biru, BPN: kuning, GITEWS(merah)) (Abidin :2012)
Abidin (2012) menyatakan bahwa mengingat luasnya wilayah cakupan, sifat kepulauan Indonesia, dan pembagian ruang yang relatif tinggi dalam infrastruktur komunikasi di dalam wilayah Indonesia, aspek hubungan komunikasi dari CORS sistem harus direncanakan secara efektif dan efisien. Dengan pertimbangan berbagai kondisi geografis wilayah Indonesia dan cakupan telekomunikasi yang ada, komunikasi data BPN GPS CORS harus memanfaatkan jaringan baik GSM (3G, EDGE, HSDPA), LAN / WAN (Local Area Network / Wide Area Network) ataupun Internet broadband.
I.7.2. Kemampuan GPS RTK NTRIP
Penman (2011) melakukan penelitian untuk mengetahui ketelitian GPS RTK NTRIP dengan tiga variasi panjang baseline di Queensland, Australia. Pada panjang
±2.13mm. Sementara pada panjang baseline 4 kilometer diperoleh nilai standar deviasi Easting ±3.20mm dan Northing ±3.41mm. Dan pada titik terakhir yakni lokasi dengan panjang baseline 9 kilometer diperoleh nilai standar deviasi Easting ±2.85mm dan Northing ±3.47mm. Dari hasil tersebut dinyatakan bahwa panjang baseline hanya mempengaruhi sedikit nilai kepresisian hasil pengukuran GPS RTK NTRIP dengan penggunaan CORS yang dimiliki kantor RPS Sunshine Coast, Queensland.
Pirti (2013) melakukan analisis dari tiga tes pengukuran hasil RTK GNSS yang menunjukkan bahwa perbedaan koordinat horisontal berada pada fraksi mm sampai 1 cm di Istanbul, Turki. Perbedaan koordinat tinggi yang dihasilkan adalah beberapa mm hingga sekitar 1-2 cm. Pengukuran GPS RTK dapat mempergunakan satelit GPS maupun GLONASS yang memerlukan receiver pendukung. Ketika GPS dan GLONASS digunakan bersama-sama, receiver menggunakan satu satelit tambahan dalam untuk memperhitungkan perbedaan waktu yang digunakan oleh dua sistem (waktu GLONASS). Oleh karena itu RTK sistem gabungan GPS / GLONASS ini sangat berguna, terutama untuk koreksi ambiguitas fase pada daerah berobstruksi. Hal tersebut menyebabkan nilai ketelitian hasil pengukuran GPS RTK mampu mencapai nilai hanya beberapa sentimeter saja.
Prabowo (2014) melakukan penelitian dengan memperbandingkan 5 provider telekomunikasi untuk mengetahui ketelitian pada pengukuran GPS RTK NTRIP untuk area pengukuran wilayah Yogyakarta dengan CORS GMU 1 menggunakan receiver Leica GS08. Rerata nilai kepresisian horisontal dengan jangkauan panjang baseline 20 kilometer secara berurutan sebagai berikut; provider Three, Axis, Telkomsel, Indosat, dan XL dengan nilai 0,035m; 0,035m; 0,043m; 0,042m; dan, 0,043m. Sementara Indra (2014) melakukan penelitian GPS RTK NTRIP dengan alat dan stasiun base yang sama menghasilkan tingkat ketelitian posisi horisontal berkisar antara 0,5 cm sampai dengan 4,2 cm dan ketelitian vertikal 0,7 cm sampai dengan 14 cm pada jarak 0,25 km hingga 15 km. Sedangkan pada panjang baseline 20 km ketelitian horisontal mencapai kisaran 5,6 cm hingga 75,2 cm dan ketelitian vertikal 3,5 cm sampai dengan 67,9 cm dikarenakan hanya mendapat solusi float. Secara umum, nilai kepresisian horisontal yang dihasilkan dari pengamatan RTK NTRIP berbanding terbalik dengan panjang
I.7.3. Penggunaan GPS untuk pengukuran tinggi ortometrik
Opaluwa (2011) menjelaskan bahwa untuk menentukan tinggi ortometrik dari pengukuran GPS metode beda fase maka penggunaan geoid yang teliti sangat diperlukan. Opsi yang ada antara lain adalah geoid gravimetrik, interpolasi geometrik, maupun kombinasi dari keduanya. Penelitian yang dilakukan menggunakan model geoid global EGM 96 di Nigeria menghasilkan standar deviasi residual antar tinggi ortometrik terbesar mencapai 1,453 meter.
Sanlioglu (2009) melakukan penelitian implementasi penentuan tinggi ortometrik dengan GPS RTK NTRIP di Konya, Turkey. Penelitian tersebut menggunakan model geoid regional Konya hasil interpolasi geometrik. Penentuan tinggi ortometrik menggunakan GPS RTK NTRIP diperbandingkan dengan titik yang telah dilakukan pengukuran dengan digital levelling menghasilkan akurasi rata-rata 0,031 cm dari 29 titik. Sementara ketelitian tinggi ortometrik(H) yang dihasilkan dari pengukuran adalah sebesar 0,107 meter.
I.8 Landasan Teori I.8.1. Akuisisi data GPS
1.8.l.l. Konsep GPS. GPS atau Global Positioning System, merupakan sistem untuk menentukan posisi tiga dimensi (secara global) di permukaan bumi ya n g berbasiskan pengamatan satelit. Sistem satelit ini terdiri dari 24 satelit dengan jarak ketinggian orbit 20.200 km dari bumi. GPS terdiri dari tiga segmen utama, yaitu segmen satelit, segmen kontrol, dan segmen pemakai (Abidin, 2000). Segmen satelit terdiri dari satelit-satelit GPS. Segmen kontrol terdiri dari stasiun-stasiun pemonitor dan pengontrol satelit. Segmen pemakai terdiri dari pemakai GPS termasuk alat-alat penerima dan pengolah sinyal data GPS. Abidin (2000) menjelaskan segmen GPS lebih lanjut sebagai berikut:
1. Segmen satelit GPS merupakan stasiun radio di luar angkasa yang dilengkapi dengan antena untuk mengirim dan menerima sinyal gelombang. Sinyal dari satelit kemudian akan diterima receiver GPS yang ada di permukaan bumi dan digunakan untuk menentukan posisi, kecepatan, serta waktu.
2. Segmen kontrol merupakan stasiun pengontrol dan pemonitor satelit selain bertugas untuk mengontrol dan memonitor satelit, juga berfungsi untuk menentukan orbit dari seluruh satelit GPS.
3. Segmen pemakai harus memiliki alat penerima sinyal GPS yang berfungsi untuk menerima serta memproses sinyal dari satelit GPS untuk penentuan posisi, kecepatan, serta waktu.
Konsep dasar penentuan posisi di muka bumi dengan GPS adalah dengan perhitungan jarak (Rizos,1999). Receiver GPS telah mengetahui posisi dari setiap satelit di angkasa. Namun, penentuan posisi receiver masih membutuhkan jarak dari setiap satelit menuju receiver GPS. Jarak tersebut dihitung oleh receiver dengan melakukan perkalian dari kecepatan sinyal yang ditransmisikan dengan waktu yang dibutuhkan sinyal untuk mencapai receiver. Untuk menentukan waktu diterimanya gelombang satelit, receiver melakukan pencocokan kode satelit yang ditransmisikan dengan kode yang dimiliki oleh receiver dan melakukan perbandingan mengenai seberapa banyak dibutuhkannya selisih waktu antara kode receiver dengan kode dari satelit.
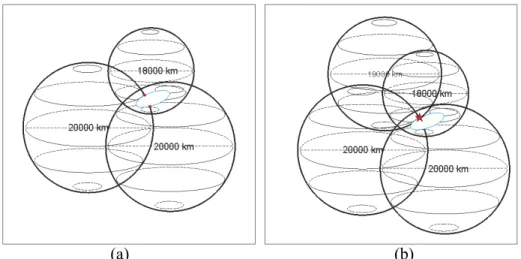
Rizos (1999) mengungkapkan bahwa penentuan posisi di atas permukaan bumi membutuhkan setidaknya 4 buah informasi posisi dari satelit. Dari posisi empat buah satelit yang diketahui maka posisi receiver dapat diketahui menggunakan metode triangulasi. Metode triangulasi ini bekerja dengan perhitungan jarak antar satelit menuju receiver. Titik pertemuan yang terbentuk dari setidaknya 4 satelit dengan posisi satelit dan jarak antara satelit menuju receiver yang telah diketahui adalah satu titik posisi receiver di atas permukaan bumi. Namun, masih terdapat permasalahan mengenai bias pengukuran seperti kesalahan jam satelit dan receiver, bias ionosfer, bias troposfer yang masih mempengaruhi penentuan posisi tersebut. Penjelasan mengenai pentingnya triangulasi menggunakan empat buah posisi satelit dapat dilihat dari gambar I.1.
(a) (b)
Gambar I. 2. Triangulasi tiga buah posisi satelit yang diketahui (a) dan Triangulasi dengan empat buah posisi satelit yang diketahui(b) ) (Dimodifikasi dari Rizos:1999) 1.8.l.2. GPS RTK NTRIP. Seeber (2003) menyatakan bahwa pengukuran menggunakan metode Real Time Kinematik adalah teknik diferensial positioning untuk menentukan koordinat titik dengan memanfaatkan pengukuran beda fase. Pengukuran dilakukan dengan penempatan receiver rover pada suatu titik untuk melakukan perekaman data dari satelit sekaligus menerima koreksi fase dari stasiun
base referensi yang telah diketahui koordinatnya. Penentuan ambiguitas fase
dilakukan secara real time, sehingga dapat memberikan angka koordinat pada tingkat sentimeter dari titik-titik yang diamati. Hasil tersebut bisa didapat saat receiver masih melakukan akuisisi data selama beberapa detik jika inisialisasi yang baik dilakukan.
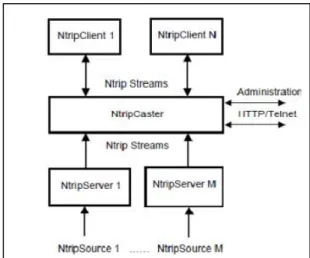
RTK NTRIP (Networked Transport of RTCM via Internet Protocol) adalah sebuah metode pengukuran dengan pengiriman koreksi data GNSS yang berformat RTCM melalui protokol internet secara real time (RTCM, 2002). Keuntungan yang paling tampak dari metode GPS RTK NTRIP ini adalah minimalisasi penggunaan jumlah instrumen. Selain itu, penggunaan metode ini dapat mempercepat kerja pengukuran, menambah jumlah atau volume pekerjaan pengukuran, dan tentu saja dapat mengurangi biaya operasional. NTRIP dikembangkan untuk aplikasi yang menggunakan transmisi protocol yang berbasis HTTP (Hyper Text Transfer Protocol) yang nantinya digunakan sebagai transfer data. Gambar I.2 menunjukkan proses pengiriman data pada pengukuran GPS metode RTK NTRIP.
Gambar I. 3. Pengiriman data pada RTK NTRIP (Weber, 2005)
Weber dkk (2005) menyatakan bahwa dalam NTRIP protocol berperan beberapa komponen sebagai berikut:
1. NTRIP source. Komponen ini terdiri dari antena GNSS, receiver GNSS dan kabel penghubung. Antena GNSS didirikan di atas monumen atau tugu yang dapat ditempatkan di atas bangunan maupun permukaan tanah, sementara kabel penghubung menghubungkan antena dengan receiver maupun receiver dengan server. NTRIP source berfungsi untuk menerima gelombang yang dipancarkan satelit-satelit GNSS.
2. NTRIP server. Merupakan bagian dari sistem CORS berupa komputer yang berfungsi untuk transfer data koreksi dari NTRIP source ke NTRIP
caster.
3. NTRIP caster. Komponen ini berperan sebagai pemancar sinyal koreksi dari stasiun base melalui jaringan internet dengan mengintegrasikan data dari receiver (NTRIP client).
4. NTRIP client. Merupakan komponen pengguna (receiver) yang mendapat koreksi data dari stasiun base.
Penentuan posisi menggunakan metode Real Time Kinematik mengalami perkembangan teknologi dalam penerimaan koreksi yang diberikan yakni (Mullenix, 2011):
Pengamatan yang dilakukan pada metode single base RTK adalah pengamatan secara diferensial dengan menggunakan dua receiver GNSS yang bekerja secara simultan dengan menggunakan data fase. Koreksi data dikirimkan secara satu arah dari base station kepada rover melalui transmisi radio atau internet seluler menggunakan modem. Keterbatasan dari metode RTK ini adalah semakin panjang base line antara rover dengan stasiun referensi, maka tingkat ketelitiannya akan semakin berkurang. Hal ini disebabkan oleh adanya kesalahan distance dependent (seperti perlambatan sinyal satelit GNSS akibat pengaruh ionosfer) yang semakin tinggi, karena semakin jauh jarak antara rover dengan stasiun referensi sehingga proses pemecahan resolusi ambiguitas (ambiguity
resolution) antara base station dengan rover sulit untuk dilakukan.
2. Network RTK
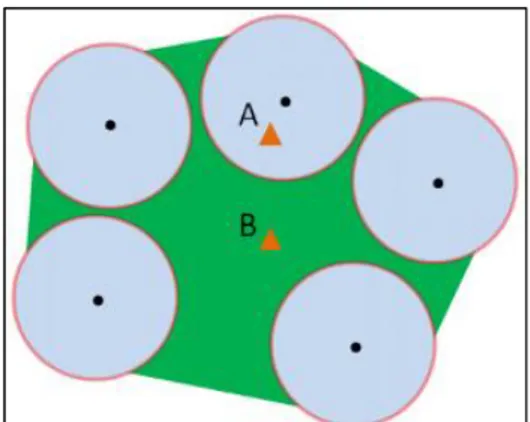
Metode Network Real Time Kinematic (NRTK) merupakan sebuah metode penentuan posisi secara relatif dari pengamatan GNSS menggunakan beberapa stasiun base referensi yang bekerja secara simultan mengirimkan koreksi. Tujuan dari penggunaan Network RTK adalah untuk meminimalisasi pengaruh kesalahan akibat ketergantungan panjang
baseline pada rover. Metode ini melakukan penyelesaian koreksi
ambiguitas satelit yang diamati menggunakan jaringan stasiun base yang setidaknya terdiri dari tiga buah stasiun base (umumnya lima base). Dari semua data pada stasiun base, kemudian dilakukan pengiriman koreksi menuju rover.
Dari gambar I.3 dapat divisualisasikan perbandingan antara single base RTK dengan network base RTK. Titik hitam sebagai stasiun base mempunyai jangkauan pengiriman koreksi 20-25 mil (lingkaran biru) dalam moda single base RTK yang berarti hanya dapat menjangkau titik A. Sementara dengan moda network base RTK pengukuran RTK secara teliti dan akurat dapat dihasilkan pada titik B yang divisualisasikan dengan daerah berwarna hijau.
Proses penentuan koordinat secara teliti pada pengukuran GPS RTK NTRIP mengandalkan penentuan ambiguitas fase secara cepat. Proses dalam mendapatkan solusi ambiguitas fase tersebut adalah sebagai berikut (Henning,2011):
1. Penggunaan data pseudorange dan data fase untuk melakukan estimasi ambiguitas fase bilangan bulat. Bias multipath menjadi batasan dalam proses ini. Hasil dari proses ini adalah data dengan akurasi meter hingga sub meter.
2. Penggunaan solusi diferensial untuk memecahkan ambiguitas fase menjadi
float, dalam proses ini terdapat reduksi dalam pengaruh beberapa
kesalahan seperti kesalahan jam satelit, kesalahan jam receiver, kesalahan
hardware satelit dan receiver, maupun cycle slips.
3. Pencarian ambiguitas fase menjadi bilangan bulat (fixed integer). Kombinasi dari beberapa frekuensi yang dapat diterima oleh receiver GNSS akan mempermudah penyempitan data ambiguitas. Sementara itu dengan jumlah satelit yang semakin banyak maka semakin baik pencarian ambiguitas fase.
4. Ambiguitas fase dalam kondisi terkoreksi fixed. Pada proses ini terjadi inisialisasi untuk mencapai ketelitian sub-centimeter.
1.8.1.3. Sistem CORS. Ocalan (2010) menyebutkan bahwa CORS (Continuously
Operating Reference Station) adalah stasiun referensi GNSS (Global Navigation Satellite System) permanen yang mampu mendukung penentuan posisi tiga dimensi
selama 7 hari dan sepanjang 24 jam. Seeber (2003) menyatakan data yang diperoleh dari CORS bisa dimanfaatkan baik secara post processing melalui layanan FTP (File
Transport RTCM via Internet Protocol. Pada layanan FTP, server dari stasiun base
dapat mengirimkan data berformat RINEX (Receiver Independent Exchange Format) ke komputer klien melalui web. Sementara itu dalam penggunaan akses GNSS-CORS secara real time, klien membutuhkan receiver yang harus dilengkapi dengan sambungan internet sebagai komunikasi data dari stasiun GNSS-CORS ke receiver klien. Melalui koneksi tersebut, stasiun base CORS akan mengirimkan data koreksi dalam format RTCM ke receiver klien.
Seeber (2003) menjelaskan bahwa The Radio Technical Commission for
Maritime Services (RTCM) merupakan organisasi yang terdiri atas berbagai komite
khusus yang bertugas mengembangkan standar radio navigasi dan radio komunikasi maritim. Format data RTCM dalam bentuk biner yang ringkas bagus untuk pemrosesan secara real time. Data RTCM berupa beberapa jenis pesan yang berisi
header dan body. Header berisi jenis pesan, waktu, dan panjang pesan. Body berisi
data untuk setiap jenis pesan yang berisi pesan spesifik tertentu. Hingga saat ini RTCM telah memiliki beberapa Special Committee (SC), diantaranya adalah RTCM SC-104 yang bertugas mendefinisikan standar protokol serial yang digunakan untuk penyiaran koreksi pseudorange dari stasiun referensi GPS/GNSS. RTCM SC-104 terdiri dari:
1. RTCM 2.0 (Sinyal Koreksi DGPS dengan akurasi meter) 2. RTCM 2.1 (Sinyal Koreksi DGPS dan RTK)
3. RTCM 2.2 (Sinyal Koreksi DGPS dan RTK, serta Glonass)
4. RTCM 2.3 (Sinyal Koreksi DGPS dan RTK, Glonass, serta Antenna
Definition)
5. RTCM 3.0 (Sinyal Koreksi DGPS dan RTK, Antenna Definition, serta
GNSS Networked RTK)
1.8.1.4. GPS heighting. Nilai tinggi yang diperoleh dari survey GPS adalah tinggi ellipsoid. Beberapa bidang atau kasus mungkin cukup hanya dengan menggunakan ketinggian ellipsoid saja. Namun, terdapat banyak aplikasi yang membutuhkan ketinggian yang lebih mendekati kondisi nyata dengan permukaan fisik seperti direferensikan ke geoid atau dalam sistem tinggi ortometrik. Sementara itu, untuk memproduksi ketinggian ortometrik (H) dibutuhkan pengolahan data yang tepat dengan komposisi data yakni data model geoid dan elipsoid. Kedua poin tersebut dapat
menyoroti masalah utama yang ditemukan dalam reduksi tinggi hasil pengukuran GPS ke datum vertikal nantinya (Higgins, 2011).
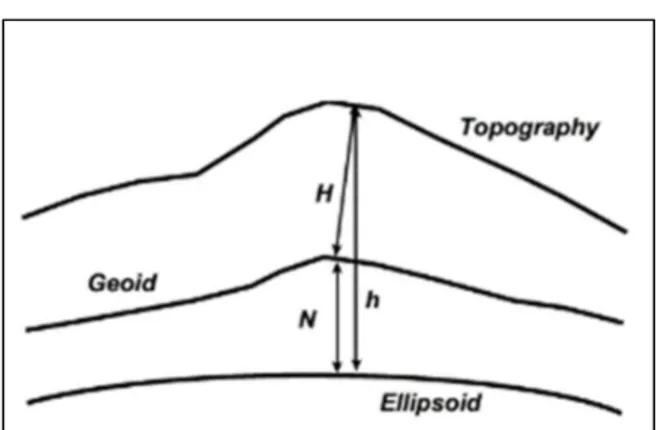
Fraczek (2003) mendefinisikan geoid sebagai bidang ekuipotensial yang berhimpit dengan muka air laut rata-rata (Mean Sea Level). Bumi tidak mempunyai bentuk sempurna geometrik yang dapat didefinisikan. Namun bidang matematis yang paling dapat mendekati representasi bentuk bumi nyata adalah geoid.
Gambar I. 5. Geoid, Elipsoid, dan Topografi (Higgins, 1999) Persamaan 1.1. digunakan dalam menentukan tinggi ortometrik.
h = H + N ………. (I.1) Dimana,
H: tinggi ortometrik (tinggi dengan referensi acuan bidang geoid) N: undulasi geoid
h: tinggi geometrik (tinggi dengan referensi acuan bidang ellipsoid)
Dari rumus perhitungan tinggi ortometrik tersebut kemudian dapat dilakukan perhitungan ketelitian tinggi ortometrik untuk mengetahui kualitas dari hasil data pengukuran yang mempunyai bidang referensi geoid. Adapun rumus perhitungan ketelitian tinggi ortometrik adalah sebagai berikut:
= ± + ... (I.2)
Dimana,
: standar deviasi tinggi ortometrik : standar deviasi undulasi
: standar deviasi tinggi geometrik
Dalam prakteknya, GPS heighting biasanya melibatkan pengukuran ketinggian ellipsoid dengan GPS kemudian dilakukan penerapan reduksi ke beberapa bentuk model geoid. Tahap terakhir adalah penyesuaian data hasil pengukuran ketinggian ortometrik ke datum vertikal yang ada. Penentuan tinggi menggunakan GPS mempunyai beberapa keterbatasan. Higgins (1999) mengungkapkan berikut ini adalah beberapa keterbatasan yang perlu dipertimbangkan dalam pengukuran tinggi menggunakan GPS:
a. Keterbatasan oleh pengukuran GPS.
b. Keterbatasan oleh ketersediaan model geoid yang mencakup area. c. Keterbatasan dari penggunaan datum vertikal.
I.8.2. Jaringan Internet Seluler
1.8.2.1. Teknologi provider jaringan seluler. Terdapat banyak provider jaringan seluler yang beroperasi di Indonesia. Provider jaringan mempunyai peran penting dalam transfer berbagai macam bentuk data. Tuntutan proses transfer data yang semakin besar membuat perkembangan teknologi jaringan seluler semakin maju. Pereira (2004) mengungkapkan perkembangan teknologi seluler sebagai berikut:
1. Generasi awal teknologi seluler (1G hingga 2G)
Generasi pertama dalam system komunikasi seluler mampu menyediakan layanan transmisi suara dengan menggunakan frekuensi sekitar 900 MHz dan modulasi analog. Berlanjut ke generasi kedua, terdapat dua teknologi pada generasi ini yaitu sistem GSM (Global System for Mobile
Communication) dan sistem CDMA (Code Division Multiple Access).
Teknologi 2G digunakan untuk layanan telepon seluler, fax, dan pengiriman pesan singkat. Teknologi berkembang hingga ditemukannya 2.5G yang mampu memenuhi kebutuhan akan transfer data yang berkapasitas lebih besar dan dengan cepat seperti aplikasi multimedia. Terdapat dua macam sistem 2.5G yang menggunakan jaringan GSM yakni WAP (Wireless Application Protocol) untuk pengiriman data berkapasitas kecil dan GPRS (General Packet Radio Services) untuk layanan data
dengan kapasitas lebih besar. Secara teori, sistem GPRS mampu memberikan transfer data dengan kecepatan 40kbps to 60kbps.
2. Generasi ketiga teknologi seluler (3G)
Pada generasi ketiga dari teknologi jaringan seluler, penggunaan lebih difokuskan untuk aplikasi multimedia seperti melakukan panggilan telepon sekaligus pengiriman gambar bergerak dari pengguna telepon. Sebelum masuk secara keseluruhan ke dalam sistem 3G, banyak operator memfungsikan jaringan EDGE (Enhanced Data GSM Environment) yang secara teori mempunyai kecepatan transfer data 384 kbps. Provider jaringan umumnya menyediakan layanan sistem Wideband-CDMA atau disebut pula UMTS (Universal Mobile Telecommunications System) pada teknologi generasi ketiga. Kecepatan transfer data yang dimiliki adalah sekitar 2 Mbps.
3. Generasi masa depan(4G)
Pada generasi keempat, ditetapkan tujuan yakni integrasi dari berbagai macam teknologi mobile provider yang telah ada. Kecepatan sistem 4G yang berada pada jaringannya secara teori diklaim dapat mencapai 50-100 Mbps.
1.8.2.2. Base Transceiver Station (BTS). BTS (Base Transceiver Station) merupakan suatu elemen dalam jaringan seluler (Cell Network) yang berperan penting sebagai pemancar dan penerima sinyal dari pengguna perangkat seluler/Mobile Station (Indosat, 2016). Keberadaan BTS terdekat di suatu lokasi mempengaruhi sinyal yang diterima oleh perangkat seluler dan mengurangi permasalahan seperti sinyal hilang,
blank spot, telepon putus dan sebagainya. BTS secara umum berbentuk menara
pemancar dengan ketinggian bervariasi antara 40 - 75 meter, menyesuaikan kondisi geografis dan luas jangkauan jaringan yang dituju. Selain berbentuk menara pemancar, terdapat juga "BTS Roof Top", yaitu antena pemancar yang umumnya diletakkan di atap gedung bertingkat pada ketinggian tertentu. Pada lokasi akibat bencana alam di suatu daerah, terdapat perangkat BTS lain yakni perangkat Mobile BTS yang digunakan untuk melayani kebutuhan telekomunikasi di daerah yang tidak terjangkau BTS konvensional secara sementara.
BTS secara umum terdiri dari menara pemancar segi empat (terdapat pula bentuk segitiga / triangle), antena pemancar, kabel - kabel, dan sebuah shelter (semacam rumah-rumahan di bawah tower) (Indosat,2016). Di dalam shelter ini terdapat berbagai perangkat utama BTS itu sendiri, yang berbentuk seperti lemari dengan rak-rak mesin di dalamnya. Biasanya terdapat juga lemari rectifier (penyedia daya listrik), berbagai perangkat elektronik maupun mekanikal lainnya. Suatu area cakupan pemancar dari BTS biasa disebut Cell, secara umum satu BTS mampu mencakup area dengan radius hingga 8 - 10 Km jarak udara jangkauan sinyal secara 360 derajat. Sementara, Mobile BTS terdiri dari komponen seperti BTS konvensional hanya saja dalam skala yang lebih kecil dan dapat dipindahkan.
BTS berhubungan dengan perangkat seluler melalui perantara udara dan berhubungan dengan Base Station Controller (BSC). Secara hirarki, BSC akan mengontrol kerja beberapa BTS yang berada di bawahnya (dalam jangkauannya sesuai pengaturan). BTS berfungsi sebagai pengirim dan penerima (transceiver - receiver) sinyal komunikasi dari perangkat seluler dan ke perangkat seluler lainnya serta menghubungkan perangkat seluler yang berkaitan dengan network element lain dalam jaringan GSM menggunakan interface radio. Karena fungsinya sebagai transceiver, maka bentuk fisik sebuah BTS pada umumnya berupa tower dengan dilengkapi antena sebagai transceiver, dan perangkatnya. Fungsi dasar BTS adalah sebagai Radio
Resource Management, yaitu melakukan fungsi-fungsi sebagai berikut ini (Indosat,
2016):
1. Menjadi saluran perantara antar perangkat seluler ketika melakukan panggilan telepon.
2. Menerima dan mengirimkan sinyal dari perangkat seluler maupun ke perangkat seluler lain. Selain itu berfungsi pula mengirimkan/menerima sinyal dengan frekuensi yang berbeda-beda dengan hanya menggunakan satu antena yang sama.
3. Mengontrol power yang ditransmisikan ke perangkat seluler lain. Berperan pula dalam kontrol proses handover, yaitu proses perpindahan panggilan (perangkat seluler yang sedang bergerak) dari satu sektor ke sektor lainnya.
BTS mempunyai peranan yang sangat besar dalam topologi jaringan provider telekomunikasi. Oleh karena itu, keberadaan BTS dalam suatu wilayah merupakan suatu investasi yang besar dalam upaya memberikan kualitas sinyal yang kuat dan stabil.
I.8.3. Kontrol kualitas data
I.8.4.1. Root Mean Square Error (RMSE). Root Mean Square Error adalah akar kuadrat dari rata-rata kumpulan kuadrat selisih koordinat hasil pengukuran dengan koordinat hasil yang diperoleh dari sumber independen dengan keakuratan lebih tinggi pada titik yang sama (Warnell School of Forestry and Natural Resources,2013). Sumber independen yang mempunyai keakuratan lebih tinggi tersebut sering pula diasumsikan sebagai posisi yang sebenarnya. Jika posisi aktual tidak diketahui, maka rata-rata posisi diasumsikan sebagai posisi aktual. Semakin kecil nilai RMS yang dihasilkan maka semakin baik pula kualitas datanya. Rumus dari RMS Error adalah sebagai berikut:
= ∑ ... (I.3)
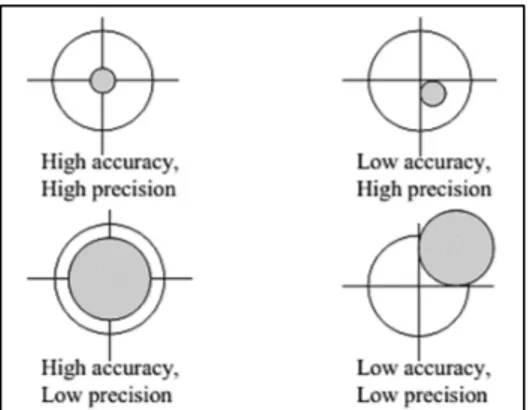
I.8.4.2. Akurasi dan presisi. Akurasi adalah derajat kedekatan dari suatu nilai hasil ukuran terhadap nilai yang sebenarnya, sementara presisi adalah derajat kedekatan suatu nilai hasil ukuran terhadap nilai rata-ratanya (Novatel,2003). Akurasi dalam pengukuran GPS yang dimaksud adalah penyimpangan posisi ukuran rata-rata GPS metode RTK terhadap nilai yang dianggap benar. Presisi dalam pengukuran GPS yang dimaksud adalah tingkat penyebaran data yang diperoleh pada suatu kumpulan data ukuran. Selain menunjukkan tingkat kerapatan persebaran data hasil pengukuran, presisi juga dapat menunjukkan konsistensi pengukuran GPS.
Gambar I. 6. Perbandingan akurasi dan presisi (Novatel:2003)
Presisi mempunyai kaitan yang kuat dengan standar deviasi, semakin tinggi kepresisiannya maka nilai standar deviasi akan semakin kecil. Standar deviasi merupakan rata-rata penyimpangan setiap nilai dengan rata-rata nilainya. Tingkat kepresisian pada data yang berupa populasi ditunjukkan dengan rumus (1.4) sementara tingkat kepresisian data pada data berupa sampel ditunjukkan dengan rumus (1.5).
= ∑( ) ... (1.4)
= ∑( ) ………(1.5)
Dalam hal ini,
: nilai suatu data ukuran
: nilai rata-rata hasil ukuran dalam populasi : nilai rata-rata hasil ukuran dalam sampel n : jumlah ukuran
Rumus (1.4) maupun (I.5) dapat digunakan untuk menghitung data ukuran yang mempunyai nilai tunggal, seperti nilai ketinggian. Sementara pada posisi horisontal terdapat dua buah data ukuran yakni posisi Easting dan Northing. Subirana (2011) menyatakan bahwa standar deviasi posisi horisontal dapat dihitung menggunakan persamaan (1.6).
Dalam hal ini,
: standar deviasi posisi horisontal : standar deviasi Easting
: standar deviasi Northing
Perhitungan standar deviasi setiap nilai Easting dan Northing dapat dihitung menggunakan rumus (1.4) ataupun rumus (I.5) menyesuaikan jenis data yang digunakan. Sementara itu, nilai dapat digunakan untuk merepresentasikan tingkat kepresisian data dari posisi horisontal.
I.8.4. Statistik Data
1.8.4.1. Pengertian Korelasi. Sugiyono (2016) mengungkapkan bahwa hubungan antara dua variabel atau lebih dapat dilakukan dengan menggunakan perhitungan korelasi antar variabel terkait. Korelasi merupakan angka untuk menunjukkan arah dan kuatnya hubungan antara dua variabel atau lebih yang terkait dengan dasar teori yang telah didukung. Arah hubungan antar variabel tersebut dapat berupa hubungan positif atau negative, sedangkan kuat nya hubungan dinyatakan dengan besarnya koefisien korelasi.
Berikut adalah rumus perhitungan korelasi:
= ∑ (∑ )(∑ )
∑ (∑ ) ∑ (∑ )
... (I.7)
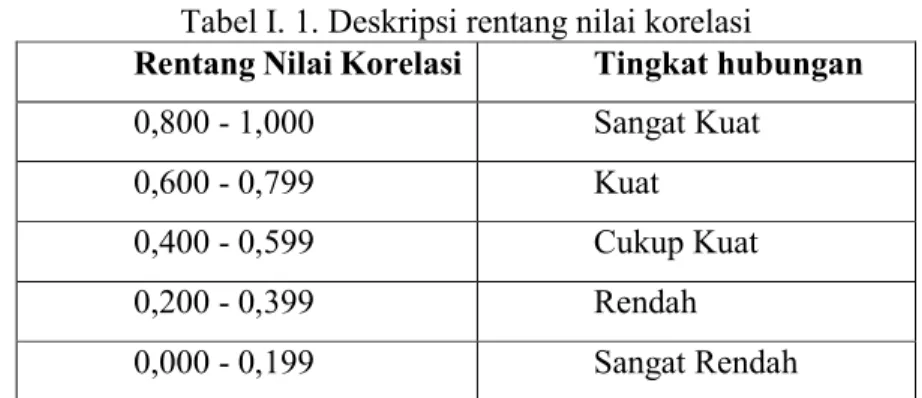
Koefisien korelasi sederhana dilambangkan (r) adalah suatu ukuran arah dan kekuatan hubungan linier antara dua variabel bebas (X) dan variabel terikat (Y), dengan ketentuan nilai r berkisar dari harga (-1≤ r ≤ +1). Apabila nilai r = -1 artinya korelasinya negatif sempurna (menyatakan arah hubungan antara X dan Y adalah negatif dan sangat kuat), r = 0 artinya tidak ada korelasi, r = 1 berarti korelasinya sangat kuat dengan arah yang positif. Sedangkan arti harga r akan dikonsultasikan dengan tabel I.2 (Sugiyono, 2016).
Tabel I. 1. Deskripsi rentang nilai korelasi
Rentang Nilai Korelasi Tingkat hubungan
0,800 - 1,000 Sangat Kuat
0,600 - 0,799 Kuat
0,400 - 0,599 Cukup Kuat
0,200 - 0,399 Rendah
0,000 - 0,199 Sangat Rendah
Dalam analisis korelasi terdapat pula koefisien determinasi(r2) dengan rumus
sebagai berikut;
= ( )2 ... (I.8)
Koefisien ini disebut koefisien penentu karena varian yang terjadi pada variabel dependen dapat dijelaskan melalui varian pada variabel independen.
1.8.4.2. Pengertian Regresi. Pada setiap penelitian, kondisi yang terwakili dari hasil pengumpulan data adalah kondisi pada waktu sekarang atau waktu saat penelitian berlangsung. Untuk berbagai kepentingan lebih lanjut, dibutuhkan suatu metode melakukan prediksi/taksiran berdasarkan data yang ada. Pelaksanaan prediksi berdasarkan hasil pengumpulan data membutuhkan dua variabel, yakni variabel bebas dan variabel terikat. Berdasarkan kajian teoritis yang benar, maka terdapat hubungan yang bersifat kausal (sebab akibat). Variabel bebas dianggap sebagai variabel sebab, sementara variabel terikatnya dianggap sebagai variabel akibat. Dengan kata lain maka regresi adalah metode prediksi menentukan nilai variabel terikat dari variabel bebas menggunakan persamaan garis tertentu (Irianto, 2004).
Terdapat beberapa macam pola persamaan regresi untuk melakukan prediksi. Berikut ini adalah beberapa persamaan regresi:
1. Persamaan regresi linier,
bentuk persamaan: = + ... (1.9) 2. Persamaan regresi parabola,
bentuk persamaan: = + + ... (1.10) 3. Persamaan regresi hiperbola,
bentuk persamaan: = 1/( + )... (1.11) 4. Persamaan regresi fungsi pangkat tiga,
bentuk persamaan: = + + + ... (1.12) 1.8.4.3. Regresi Linier Sederhana. Garis regresi linier adalah garis lurus yang menghubungkan antar titik rata-rata dari suatu persebaran data dari sistem koordinat kartesi x dan y. Dari persamaan garis lurus ini maka peneliti dapat melakukan prediksi rata-rata dari nilai variable terikat (Irianto,2004).
Persamaan regresi linier sederhana berbentuk = + sebagaimana tercantum pada rumus I.9. Nilai a dapat dihitung dengan rumus 1.13 sementara nilai b dihitung dengan rumus 1.14.
=(∑ ) ∑ (∑ )(∑ )
(∑ ) (∑ ) ... (1.13)
= (∑ ) (∑ )(∑ )
(∑ ) (∑ ) ... (1.14)
Dari persamaan (1.13) dan (1.14) di atas, peneliti dapat mengetahui nilai a dan b. Selanjutnya dalam perhitungan regresi, diperlukan pengujian nilai a dan b apakah nilai tersebut dapat mewakili populasi. Maka dibutuhkan perhitungan variasi dalam regresi, dimana peneliti bisa melihat tingkat keragaman dari hasil perhitungan regresi. Berikut ini adalah beberapa variasi yang dapat dihitung(Irianto:2004):
1. Variasi kekeliruan taksiran (standard error estimate)
Variasi kekeliruan taksiran mempunyai rumus sederhana sebagai berikut: = ( − ) ... (1.15) Sementara variasi masing-masing variabel dihitung dengan rumus sebagai berikut ini;
= ∑( ) ... (1.16) = ∑( ) ... (1.17) 2. Variasi koefisien regresi
Terdapat dua macam perhitungan variasi koefisien regresi yakni: Variasi koefisien regresi a:
= +
∑( ) ... (1.18)
Variasi koefisien regresi b:
= / ∑( − ) ... (1.19) I.9. Hipotesis Penelitian
Berdasarkan teori bahwa terdapat kesalahan distance dependent maka hipotesis umum yang dapat dirumuskan mengenai penelitian ini adalah terdapat pengaruh antara panjang baseline dengan hasil ketelitian pengukuran GPS RTK NTRIP sementara variasi instrumen dan variasi provider (kualitas jaringan) turut mempengaruhi nilai ketelitiannya pula. Berikut adalah hipotesis khusus yang dapat dirumuskan mengenai penelitian;
1. Berdasarkan penelitian yang dilakukan Prabowo (2014) dengan area penelitian Yogyakarta dan menggunakan CORS GMU1 milik Departemen Teknik Geodesi UGM, provider internet seluler yang mempunyai ketelitian terbaik adalah Telkomsel sebagai provider yang mempunyai kualitas jaringan terbaik. Maka hipotesis yang dapat diambil dari penelitian ini adalah provider Telkomsel akan mempunyai ketelitian terbaik dibandingkan provider Indosat maupun XL.
2. Berdasarkan data ketelitian vertikal RTK GPS yang dirujuk pada manual
guide maupun datasheet;
spesifikasi ketelitian vertikal Trimble Pro XRT yaitu 100 mm untuk panjang baseline di bawah 30 km (tidak disebutkan secara rinci mengenai pengaruh panjang baseline),
spesifikasi ketelitian vertikal Leica Viva GS08 yaitu 10 mm+0,5ppm, spesifikasi ketelitian vertikal Javad Triumph 1 yaitu 15 mm +1ppm, maka hipotesis yang dapat diambil adalah receiver Leica mempunyai ketelitian yang terbaik dibandingkan receiver Javad dan Trimble.
3. Hasil pengukuran optimal dari pengukuran GPS RTK NTRIP pada area Yogyakarta adalah pengukuran menggunakan provider Telkomsel dan
receiver Leica. Ketelitian dari data hasil pengukuran yang direduksi
menjadi tinggi ortometrik sanggup memenuhi ketelitian peta pendaftaran tanah.