21 BAB III
PERANCANGAN SISTEM
Pada bab ini akan dijelaskan mengenai hardware sistem, software sistem dan mekaniksistem yang telah dibuat untuk mendukung dalam penjejakan radiasi matahari. Pada sub bab 3.1 akan dibahas mengenai Hardware sistem, pada sub bab 3.2 akan dibahas mengenai software sistem dan pada sub bab 3.3 akan dibahas mengenai mekanik sistem.
3.1. Hardware Sistem
3.1.1. Realisasi Hardware Sistem
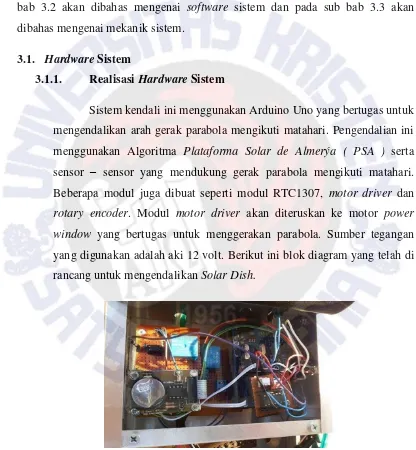
Sistem kendali ini menggunakan Arduino Uno yang bertugas untuk mengendalikan arah gerak parabola mengikuti matahari. Pengendalian ini menggunakan Algoritma Plataforma Solar de Almerýa ( PSA ) serta sensor – sensor yang mendukung gerak parabola mengikuti matahari. Beberapa modul juga dibuat seperti modul RTC1307, motor driver dan rotary encoder. Modul motor driver akan diteruskan ke motor power window yang bertugas untuk menggerakan parabola. Sumber tegangan yang digunakan adalah aki 12 volt. Berikut ini blok diagram yang telah di rancang untuk mengendalikan Solar Dish.
22
Gambar 3.2. Blok diagram sistem kendali Solar Dish.
3.1.2. Arduino Uno
Arduino uno menggunakan ATMEGA328P yang mempunyai 14 pin digital I/O dan 6 pin ADC. Mikrokontroler ini bertugas untuk menggerakan solar dish dengan motor driver dan 2 motor power window yang dapat bergerak searah jarum jam maupun berlawanan arah jarum jam. Selain itu, mirkrokontroler membutuhkan RTC1307 untuk mengetahui waktu sekarang yang akan diolah pada Algoritma Plataforma Solar de Almerýa ( PSA ). Rotary Encoder terdiri dari Photodioda sebagai penerima dan UV led sebagai pemancar untuk menghitung pergerakan motor.
Konfigurasi kegunaan pin Arduino Uno sebagai berikut :
Tabel 3.1. Konfigurasi kegunaan pin Arduino Uno.
PIN Mode Kegunaan
PIN 12 OUTPUT Motor Altitude
PIN 11 OUTPUT Motor Altitude
PIN 10 OUTPUT Motor Azimuth
PIN 9 OUTPUT Motor Azimuth
PIN 7 INPUT Limit pada sudut Azimuth
Aki 12 Volt
Arduino Uno Motor Driver Power Window Motor
23
PIN 6 INPUT Limit pada sudut Altitude PIN 3 INTERRUPT Menghitung langkah Motor
Azimuth
PIN 2 INTERRUPT Menghitung langkah Motor Altitude
A4 SDA RTC 1307
A5 SCL RTC 1307
3.1.3. Modul Motor Driver
Motor driver ini terdiri dari 4 buah optocoupler ( PC 817 ) dan 4 buah relay 12 V. Fungsi dari optocoupler ini sebagai menguatkan tegangan keluaran dari mikrokontroler untuk mengaktifkan relay. Setiap motor power window memiliki 2 buah relay agar dapat bergerak searah jarum jam maupun berlawanan arah jarum jam.
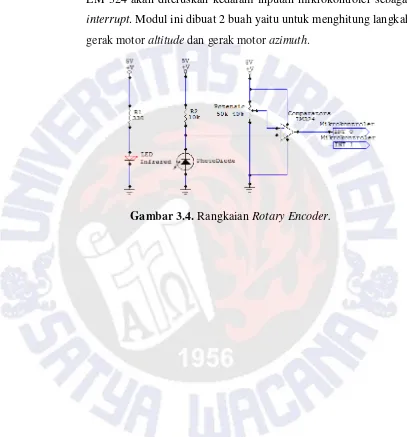
24 3.1.4. Modul Rotary Encoder
Modul ini berfungsi untuk menghitung langkah motor selama bergerak. Komponen yang digunakan adalah UV led, photodioda, potensio dan komparator ( LM324 ). Keluaran pada LM 324 akan diteruskan kedalam inputan mikrokontroler sebagai interrupt. Modul ini dibuat 2 buah yaitu untuk menghitung langkah gerak motor altitude dan gerak motor azimuth.
25 3.2. Software Sistem
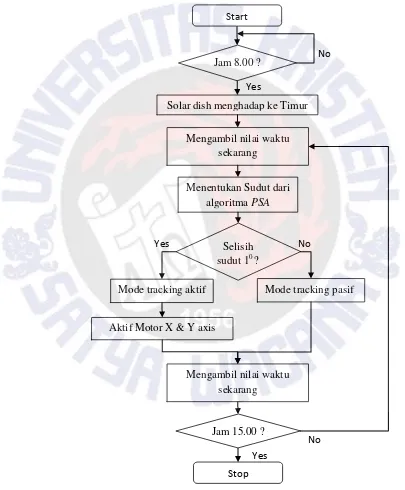
Software yang digunakan untuk perancangan software adalah Arduino 1.5.4 yang pemrogramannya berbasiskan bahasa C. Pada pembuatan program ini dibutuhkan beberapa pin I/O mikrokontroler, serial I2C, dan interupsi eksternal untuk penghitungan langkah motor. Berikut ini adalah jalannya program pada solar dish dalam mengikuti matahari.
Gambar 3.5. Flowchart Strategi pada Pengikut Matahari. Yes
Aktif Motor X & Y axis
Start
Stop Jam 8.00 ?
Mode tracking aktif Mode tracking pasif
Jam 15.00 ? Mengambil nilai waktu
sekarang Mengambil nilai waktu
sekarang
Solar dish menghadap ke Timur
26 3.3. Mekanik Sistem
3.3.1. Realisasi Solar dish
Gambar 3.6. Bentuk Realisasi solar dish.
Bahan yang di pakai untuk pembuatan solar dish ini adalah parabola yang telah dilapisi stiker chrome yang bertugas untuk memfokuskan sinar matahari ke satu titik. Kaki untuk penyanggah parabola menggunakan besi berbentuk L yang berlubang – lubang agar sistem penggeraknya tidak terlalu berat untuk bergerak. Diameter pada solar dish adalah 80 cm dan titik fokusnya adalah 50 cm.
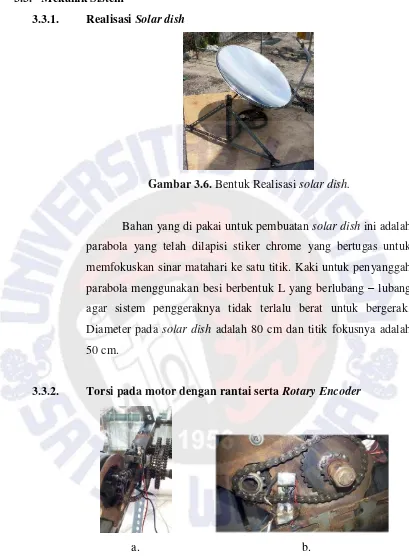
3.3.2. Torsi pada motor dengan rantai serta Rotary Encoder
a. b.
Gambar 3.7. a. Bentuk Realisasi Torsi motor terhadap Altitude dan b. Bentuk Realisasi Torsi motor terhadap Azimuth.
27
1:116,65 yang berarti 1 putaran pada solar dish atau 360 derajat dibutuhkan 116,65 kali putaran pada motor. Torsi pada pengerak motor azimuth yaitu 1:31 yang berarti 1 putaran pada solar dish atau 360 derajat dibutuhkan 31 kali putaran pada motor. Rotary encoder juga akan menghitung pergerakan solar dish melalui rantai yang telah dibuat.
Gambar 3.8. Rotary Encoder pada rantai.
3.3.3. Realisasi Mesin Stirling
Gambar 3.9. Bentuk Realisasi Mesin Stirling.
28
ini diperlukan ketelitian dalam mendesain dan menggabungan bagian – bagian mesin Stirlingyang telah dibagi menjadi 7 bagian yaitu :
1. Tabung panas
Pada tabung ini akan menerima panas dari hasil pemfokusan matahari. Di dalam tabung ini terdapat Displacer piston.
2. Tabung dingin
Tabung ini menempel dengan tabung panas, tetapi didalam ruangan tabung ini harus memiliki suhu lebih rendah dibandingkan suhu ruangan pada tabung panas. Didalam tabung ini terdapat power piston.
3. Heat sink ( pendingin )
Heat sink berguna untuk membantu mempertahankan suhu pada tabung dingin tetap rendah, yang disebabkan oleh konduksi panas pada tabung panas.
4. Displacer piston
Displacer piston berbentuk lebih panjang dibandingkan dengang power piston. Piston ini berfungsi untuk membantu power piston menjalankan satu siklus.
5. Power piston
Piston ini berada disisi tabung dingin yang akan didorong oleh tekanan dari tabung panas. Piston ini mempengaruhi besarnya kekuatan pada mesin Stirling untuk memutar flywheel.
6. Crankshaft
Crankshaft berfungsi untuk menghubungkan antara displacer piston dan power piston dalam pergerakannya. 7. Flywheel
29
mengubah gerakan linear dari piston menjadi gerakan berputar.
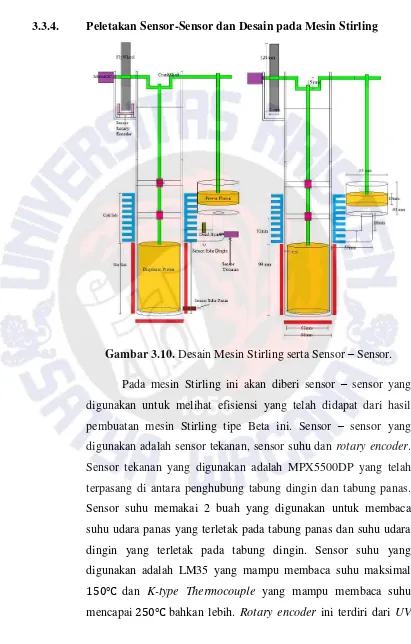
3.3.4. Peletakan Sensor-Sensor dan Desain pada Mesin Stirling
30
led dan photodioda yang diletakan di dekat flywheel. Rotary encoder ini berfungsi untuk mengetahui nilai RPM yang dihasilkan oleh mesin Stirling.
3.3.5. Penggunaan Sensor – Sensor pada Mesin Stirling
Sensor suhu LM35
Sensor LM35 akan dimasukan kedalam tabung sisi pendingin mesin Stirling dengan cara melubangi sisi tabung pendingin mesin Stirling. Lubang yang belum tertutup rapat akan di tutup dengan Glazing Hi-Temp RTV yang bertahan mencapai suhu 300 °C agar tidak terjadi kebocoran pada mesin.
LM35 diberi inputan 5 volt dan keluarannya akan dimasukan kedalam ADC arduino uno. LM35 memiliki batas maksimum suhu 150℃ dan setiap kenaikan suhu, tegangannya akan naik 10 mV. Nilai analog pada LM35 akan dibaca arduino uno yang akan dikonversi ke nilai milliVolt dan setelah itu ke nilai suhu dengan rumus milliVolt = (nilaiAnalog/1024)*5000. Nilai 1024 karena memakai pembacaan analog 10 bit dan 5000 adalah nilai tegangan maksimum keluaran pada LM35. Lalu konversi ke suhu celcius = milliVolt / 10, jadi nilai tegangan pada maksimum suhu yaitu milliVolt = 150 * 10 = 1500 mV = 1,5 Volt. [8]
Sensor suhu K-type Thermocouple dengan modul max6675 Pada max6675 akan diberi tegangan 5 volt dan sensor suhu K-type Thermocouple akan dimasukan kedalam pin 2 (T-) untuk menghitung suhu minus dan pin 3 (T+) untuk menghitung suhu plus. Untuk pin SO, CS dan SCK pada max6675 akan dimasukan kedalam arduino pin 8, 9 dan 10 secara berurutan. [9]
MPX5500DP
31
sebesar 5 volt. Pada penggunaan sensor dalam mesin Stirling ini akan mengukur tekanan dengan memakai 1 lubang saja dan lubang lainnya akan ditutup. Nilai tekanan akan ditambahkan dengan nilai tekanan udara didaerah itu juga, maka akan mendapat nilai tekanan dalam ruangan mesin Stirling yang berubah – ubah.
Nilai analog pada MPX5500DP akan dikonversi ke nilai tegangan yaitu SensorVoltage (nilai tegangan)= nilaiAnalog * ( 5 / 1023 ). Pada datasheet MPX5500DP [10], nilai tegangan akan dikonversi menjadi nilai KPA (KiloPascal) dengan rumus Vout = Vs * (0,0018*P+0.04) = 5*(0,0018*P+0.04) = 0,009*P + 0,2. Jadi didapatkan rumus P = (Vout – 0,2) / 0.009 dengan satuan KPA dan Vout adalah SensorVoltage (nilai tegangan).
Rotary encoder
Pada keluaran rotary encoder akan dimasukan kedalam ADC arduino uno, yang akan dihitung jumlah perubahan tegangan yaitu dari high ke low maupun dari low ke high. Perubahan tegangan tersebut dikarenakan photodioda yang terkena cahaya infraled dan tidak terkena infraled dengan cara menutupi arah infraled ke photodioda. Nilai perubahan tegangan tersebut akan dihitung dengan menggunakan penghitungan milliseconds pada arduino uno yang akan menghasilkan nilai RPM.
3.4. Cara Kerja Kesuluruhan Sistem
a. Pada saat solar dish dihidupkan, solar dish akan menghadap ke timur dengan cara bergerak sampai limit switch tertekan. Pergerakan altitude juga diberi limit switch untuk mengeset titik mula – mula solar dish. b. Setelah Solar dish mengarah ke timur, mikrokontroler akan mencari
32
dish akan bergerak menuju sudut matahari dengan 2 motor power window yang telah dilengkapi modul rotary encoder.
c. Letak matahari akan selalu bergerak, maka solar dish akan mengkoreksi letak matahari dengan cara bergerak 10 jika terjadi selisih 10 antara sudut pada solar dish dan sudut matahari sekarang.
d. Solar dish akan mengikuti letak matahari untuk mendapatkan titik fokus yang telah ditentukan selama 7 jam, dari jam 8 pagi sampai 3 sore. Setelah jam 3 sore, solar dish akan bergerak menuju ke arah timur.