PROYEK AKHIR
SISTEM PENGENDALI MOTOR STEPPER BERBASIS
MIKROKONTROLER ATMEGA8535
Diajukan Untuk Memenuhi Syarat Kelulusan Program Studi Diploma III Teknik Elektro
Oleh :
ALI IRSAD RANGKUTI 1000073
DIPLOMA III TEKNIK ELEKTRO
JURUSAN PENDIDIKAN TEKNIK ELEKTRO
FAKULTAS PENDIDIKAN TEKNOLOGI DAN KEJURUAN
UNIVERSITAS PENDIDIKAN INDONESIA
BANDUNG
SISTEM PENGENDALI MOTOR STEPPER BERBASIS
MIKROKONTROLER ATMEGA8535
Oleh
Ali IrsadRangkuti
Sebuah proyek akhir yang diajukan untuk memenuhi salah satu syarat memperoleh gelar Ahli
Madya pada Fakultas Pendidikan Teknologi dan Kejuruan
© Ali IrsadRangkuti2013
Universitas Pendidikan Indonesia
Agustus 2013
Hak Cipta dilindungi undang-undang.
Proyek akhir ini tidak boleh diperbanyak seluruhya atau sebagian,
LEMBAR PENGESAHAN PROYEK AKHIR
SISTEM PENEGENDALI MOTOR STEPPER BERBASIS
MIKROKONTROLER ATMEGA8535
ALI IRSAD RANGKUTI NIM. 1000073
Bandung, Agustus 2013 Menyetujui dan Mengesahkan,
Dosen Pembimbing
Drs. Yoyo Somantri, ST., M.Pd NIP. 19570805 198503 1 003
Mengetahui,
Ketua Program Studi Ketua Jurusan Diploma III Teknik Elektro Pendidikan Teknik Elektro
ABSTRAK
Motor stepper tidaksamadengan motor AC maupun DC konvensional yang berputarsecarakontinyu, tetapiperputaranpada motor stepper yaitusecaraincrementalataulangkah per langakah (step by step) sehinggadapatmemberikanputaran yang lebihpresisidanakurat.
Perancangandanpembuatansistempengendaliarahputaran motor stepper berbasismikrokontroler ATMega8535 dengan program bahasa C menggunakansoftwareCodeVisionAVRmerupakantopik yang sangatmenarikuntukdipelajari.
Dalamperancangansistempengendaliinimenggunakanmetodeeksperimen, sehinggadalampembuatandanperancangansimulator
dibutuhkanbeberapakomponenpenting yang terdiridarimikrokontroler ATMega8535 sebagaipengambilkeputusandan SPC Neo Stepper Motor sebagai driver yang dapatmembangkitkanelektromagnetik yang ditimbulkanolehlilitan motor stepperpadasaatadaarus yang mengalirpadalilitantersebut, sehinggadapatmembolak-balikanarahputaran motor stepper. Catudaya yang dipergunakanadalah 12 Volt DC yang mensupplaytegangankemikrokontrolerdan motor sertadigunakan regulator LM7085 untukmenurunkandanmenstabilkantegangan. Perancangansoftware
mengguanakanCodeVisionAVR v.2.04.9 untukpengendali system denganmikrokontroler
ATMega8535.Prinsipkerjaalatinicukupsederhanadenganmengkondisikan input masukkemainkontrol, yang kemudiandiprosesdenganbahasapemrograman C sehinggamikrokontrolerdapatmengeluarkansuatuperintahaksisecara digital yang dikirimkanke motor stepper melalui driver.
Simulator
dapatberfungsisesuaidenganperancangannyadapatdilihatdariarahputaran motor stepper, motor stepper akanberputarsearahjarum jam (clock wise) setelahmenerimaperintahcontinuous runkemudian motor akanmenunggusetelahmenerimaperintahbrakekemudain motor stepper akanberputarberlawananarahjurum jam (counter clock wise) setelahmenerimaperintahpulse continuous rundan motor stepper akanberhentisetelahmenerimaperintahstop.
ABSTRAC
Motor stepper is not same with motor AC or conventional DC that rotates around continually, but the rotation of motor stepper is incrementally or step by step therefore it can give more precision and more accurate rotation.
Designing and making of control system for rotation direction of motor stepper base on microcontroller ATMega8535 with language program c that uses CodeVisionAVR software which is the interesting topic to be learnt. In designing of control system uses experiment method, thus in designing and making of simulator is needed some main components such as ATMega8535 as decision maker and SPC Neo Stepper Motor as driver which generates electromagnetic constructed by the loop of motor stepper at there is a flow in that loop, therefore it can back and forth the rotation direction of motor stepper. The ration of energy used is 12 Volt DC that supplies the tense to micro controller and motor also it is used regulator LM7085 for reduce and stabilize the tense. The design of software uses CodeVisionAVR v.2.04.9 to conrol the system of micro controller ATMega8535. The principal work of this tool is simple enough by conditioning the input get in control main, then it is processed by language program C therefore micro controller can construct a command to do digitally that is sent to motor stepper through driver.
The simulator can work based on the design which can be seen from the rotation of motor stepper. Motor stepper will rotate clock wise after getting command continuous run then motor will wait after getting command brake then motor stepper will rotate counter clock wise after acquiring command pulse continuous run and motor stepper will stop after acquiring command stop.
DAFTAR ISI BAB I. PENDAHULAN……… 1
1.1. LatarBelakang………...……... 1
1.2. RumusanMasalah………... 2
1.3. BatasanMasalah………..………... 2
1.4. TujuanPenulisan ……….………...…………... 2
1.5. MetodePerancanganProyekAkhir……….…….……... 3
1.6. SistematikaPenulisan…...………..……….. 3
BAB II. LANDASAN TEORI……….………... 5
2.1. PemerogramanBahasa C secaraUmum………..……… 5
2.2. CodeVisionAVR………... 9
2.3.Pemerograman C untukMikrokontroler AVR menggunakanCodevisionAVR………...……… ………….. 12
2.4. DasarSistemPengendali……….... 14
2.4.1. SistemPengendali Loop Terbuka………... 15
2.4.2. SistemPengendali Loop Tertutup……….. 16
2.5. Mikrokontroler ATMega8535……… 18
2.5.2. Pin-pin PadaMikrokontroler ATMega8535……….. 22
2.6. Motor Stepper………...……….. 24
2.6.1. VariabelReluktansi………..…...25
2.6.2. Magnet Permanen………..…….. 26
2.6.3. Hybrid……….……... 27
2.6.4. Lilitan Motor………..……. 28
2.6.4.1. Motor Stepper Unipolar……….……….. 28
2.6.4.2. Motor Stepper Bipolar……….……… 28
2.6.5. Mode Step……….……….. 29
2.6.5.1. Full Step……….…. 30
2.6.5.2. Half Step………..………. 30
2.6.5.3. Mikro Step………..…….. 30
2.6.6. Komponen-komponen Motor Stepper………..…...31
2.6.6.1. Stator……….... 31
2.6.6.2. Lilitan Motor Stepper………...……… 32
2.6.6.3. Rotor………..………...32
2.6.7. PrinsipKerjaPengendalian Motor Stepper………. 33
2.7. Driver Motor Stepper………..………...35
2.7.1. SPC Neo Stepper Motor………..………… 36
2.7.2. Antarmuka SPC Neo Stepper Motor………..……. 36
2.8. Komunikasi serial USART……….... 37
2.8.1. Antarmuka Serial dan USART………..….. 38
2.8.2. Arsitektur Internal USART Atmega8535………….…….. 39
2.8.3. Register Kontrol USART Atmega8535………..………… 41
BAB III. PERANCANGAN DAN PEMBUATAN ALAT………... 43
3.1.TujuanPerancangan...……….………... 43
3.2. Diagram AlirPerancangan………...……...………... 43
3.3.perancanganhadwarealat ………..…….…….……... 45
3.4. DeskripsiKerjaAlat…….……….………...………...45
3.5. PerancanganAlogoritmadan Program Alat………….………. 47
3.6. Langkah-LangkahPembuatanAlogoritmadan Program Alat…..…. 49
3.7. Pembuatan Program Alat……….……….. 51
BAB IV. PENGUJIAN HADWARE DAN SOFTWARE...……… 59
4.1.Blok Diagram………..……… 59
4.2.PengujianRangkaianHadware………….………….….……..…... 60
4.2.1. PengujianRangakaianCatuDaya………..……. 60
4.2.2. PengujianRangkaianMikrokontroler……...……….. 61
4.3.3.PengujianRangakaian Driver Motor…..………..….. 63
4.2.4. Pengujian Motor Stepper………..……...64
4.3. Pengujian Program Alat………..…..……. 67
4.4. HasilPengujian……….…. 71
BAB V. KESIMPULAN DAN SARAN………..……...………...73
5.1. Kesimpulan……….……….……….. 73
5.2. Saran………..………. 73
DAFTAR GAMBAR
Gambar 2.1. TampilanAwalCodeVisionAVR………..………10
Gambar 2.2. IDE PerangkatLunakCodeVisionAVR……….………. 12
Gambar 2.3. SistemPengendali Loop Terbuka…..………...… 15
Gambar 2.4. ContohSistemPengendali Loop Terbuka…...………...… 15
Gambar 2.5. SistemPengendali Loop Tertutup……..………...… 16
Gambar 2.6. ContohSistemPengendali Loop Tertutup....………...… 18
Gambar 2.7. Konfigurasi Pin ATMega8535...………...… 22
Gambar 2.8. Motor Stepper Variable reluktansi…..……….. 25
Gambar 2.9. Motor Magnet Permanen………..………. 27
Gamabar 2.10. Motor Hybrid……….………... 27
Gambar 2.11. Motor Unipolar………..……… 28
Gambar 2.12. Dasar-DasarMotor Stepper…...………..……….. 29
Gambar 2.13. Stator Motor Stepper………..………..………. 31
Gambar 2.14. LilitanStator Motor Stepper……….……… 32
Gambar 2.15. Rotor Motor Stepper……….……… 32
Gambar 2.16.Motor stepper Magnet PermanendanLilitan………...………….. 33
Gambar 2.17.PutaranSearahJarum Jam………. 34
Gambar 2.18.PutaranBerlawananarahjarum jam………. 34
Gambar 2.19.Driver Motor Stepper Menggunakan SPC Neo motor stepper.… 36 Gambar 2.20.Konektor SPC Neo motor Stepper dengan Motor Unipolar 4 phasa……….. 37
Gambar 3.1. AlurPerencanaan…...………..………. 44
Gambar 3.3. AlurkerjaSistemPengendaliMotor Stepper…..…………..…… 47
Gambar 3.4. Diagram AlirPemerogramanMikrokontroler…...…………...… 50
Gambar 3.5. TapilanPertamaKali CodeVisionAVR... 51
Gambar 3.6. KonfirmasiMembuatProject atauFile………....…………. 51
Gambar 3.7. KonfirmasiPenggunaanCodeWizardAVR……….………. 52
Gambar 3.8. Menyimpan File Project……….………... 52
Gambar 3.9. TampilanKonfigurasiProject………....………... 53
Gambar 3.10. TampilanInformasiHasilCompile………..………. 55
Gambar.3.11. Setting Programer………..…………...………. 56
Gambar 3.12. CodeVisonAVR Chip Programer……….………. 56
Gambar 3.13. Load to Flash Buffer………. 57
Gambar 3.14. Proses MendownloadProgram…...……….………. 57
Gambar 3.15. Warning Eeprom………..………..………... 57
Gambar. 3.16. Proses MendownloadProgram……...………..……. 58
Gambar 4.1. Diagram blokRangkaian……… 59
Gambar 4.2. PengujianLilitanMotor Stepper……….………..………… 65
Gambar 4.3. PengaturanMikrokontroler ATMega8535………..……….. 68
Gambar 4.4. Lembarkerjapenulisan program……….………. 68
Gambar 4.5. Proses Compile………..……… 69
Gambar 4.6. Pengaturan Project………..……….. 69
Gambar 4.7. Proses Make………..……… 70
Gambar 4.9. Proses download………...………. 70
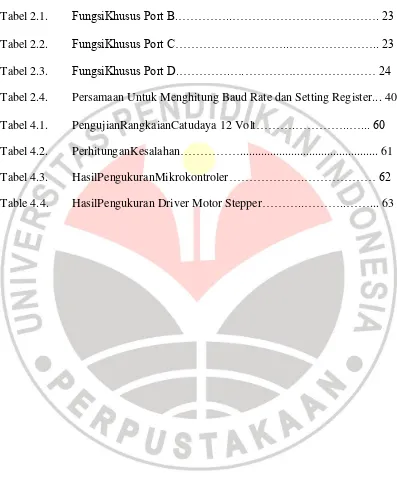
DAFTAR TABEL
Tabel 2.1. FungsiKhusus Port B.…………..………. 23
Tabel 2.2. FungsiKhusus Port C………..……….. 23
Tabel 2.3. FungsiKhusus Port D.………….….……… 24
Tabel 2.4. Persamaan Untuk Menghitung Baud Rate dan Setting Register... 40
Tabel 4.1. PengujianRangkaianCatudaya 12 Volt……….…………..…... 60
Tabel 4.2. PerhitunganKesalahan………... 61
Tabel 4.3. HasilPengukuranMikrokontroler……….……… 62
BAB III
PERANCANGANALAT
3.1. Tujuan Perancangan
Berdasarkan kajian ladasan teori pada bab sebelumnya, maka pada bab ini
akan dilakukan pembahasan berkenaan dengan perancangan alat, perancangan ini
bertujuan untuk merealisasikan gagasan yang telah direncanakan, dengan
demikian dapat menghasilkan simulator yang sesuai dengan dengan fungsi dan
spesifikasi sistem yang telah ditentukan. Selain itu sebagai pedoman atau batasan
dalam merealisasikan alogoritma dan program alat dan juga meminimalisir
kesalahan dalam proses realisasi alogoritma dan program yang akan dibangun
sehingga sesuai dengan apa yang direncanakan.
3.2. Diagram Alir Perancangan
Dalam memudahkan dalam pelaksanaan perancangan simulator Sistem
pengendali Motor Stepper Berbasis Mikrokontroler ATMega8535, maka langkah
awal yang ditempuh adalah membangun gagasan, kemudian dilanjutkan dengan
menentukan spesifikasi dan prinsip kerja alat yang diinginkan, dilanjutkan dengan
pencarian data dan informasi perangkat keras (hadware) yang dibutuhkan serta
fungsi-fungsi kerja yang harus dipenuhi. Langkah berikutnya adalah pembutan
software yang digunakan untuk mengoperasikan sistem pengendali motor stepper,
sehingga perangkat keras berfungsi sesuai dengan keinginan.Kemudian
dilanjutkan dengan pengukuran dan pengujian alat, pencatatan hasil pengujian dan
penyusunan laporan.
Langkah-langkah perancangan Sistem Pengendali Motor Stepper Berbasis
Mikrokontroler ATMega8535, jika disederhanakan dalam bentuk alur
44
Tidak
Ya
Tidak
Ya
Tidak
Ya
Gambar 3.1 Alur Perencanaan Sesuai
Perancangan Hadware dan Software
Deskripsi kerja Sesuai dengan yang
direncanakan
Telah sesuai Pengujian
Penulisan laporan Pencarian ide
Proses Start
45
3.3.Perancangan Hadware Alat
Perancangan hadware (perangkat keras) dalam sistem pengendali motor
stepper berbasis mikrokontroler ATMega8535 ini yaitu:
Mikrokontroler ATMega8535 adalah IC yang dapat deprogram
berulangkali baik ditulis maupun dihapus. Digunakan sebagai pengontrol
otomatis atau manual pada system pengendali motor stepper ini.
Driver motor stepper menggunakan SPC Neo Motor Stepper
Motor Stepper Unipolar 6 kabel 4 phasa 12 Volt 0,4Ampere dan 1,8
derajat.
DT-HiQ AVR USB ISP yang digunakan sebagai downlowder program Penggunaan RS-232 sebagai penghubung antara mikrokontroler dengan
PC
Power supplay 12 Volt
3.4. Deskripsi Kerja Alat
Sistem Pengendali Motor Stepper Berbasis Mikrokontroler ATMega8535
akan bekerja berdasarkan program yang ditanamkan pada chip, sehingga sistem
pengendali motor stepper bekerja sesuai dengan instruksi yang diberikan melalui
program yang diinstruksikan oleh operator melalui komputer atau laptop.
Berikut ini akan dijelaskan mengenai deskripsi kerja Sistem Pengendali
46
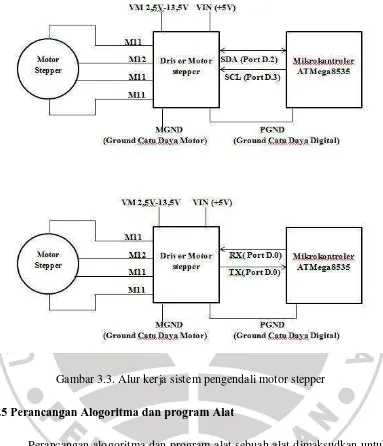
Gambar 3.2 Diagram Blok Hadware Controller
Berdasarkan gambar diatas maka dapat dijelaskan sebagai berikut,
instruksi dari operator melalui sebuah PC merupakan instruksi utama yang
digunakan pada Sistem Pengendali Motor Stepper Berbasis Mikrokontroler
ATMega8535dengan fungsi melakukan gerakan putaran searah jarum jam (Clock
Wise) dan putaran berlawanan arah jarum jam (Counter Clock Wise), dimana
mekanisme yang digunakan adalah operator memberikan perintah melalui PC
menggunakan program CodeVisionAVR yang menggunakan bahasa C.
selanjutnya instruksi yang berupa sinyal tersebut diolah pada sistem
mikrokontroler.
Sinyal yang dihasilkan kemudian diolah pada mikrokontroller, pada blok
ini program yang dibuat adalah untuk mengkondisikan sinyal output berdasarkan
sinyal input, dan dengan sinyal output dari mikrokontroler tersebut bekerja
mengikuti program yang ditanamkan pada chip.
Drivermotor stepper bekerja berdasarkan instruksi dari mikrokontroler,
instruksi yang diberikan adalah control kecepatan melalui control arah putaran
yang berlaku pada motor stepper tersebut.
Diagram alur kerja dari alat Sistem Pengendali Motor Stepper Berbasis
47
Gambar 3.3. Alur kerja sistem pengendali motor stepper
3.5Perancangan Alogoritma dan program Alat
Perancangan alogoritma dan program alat sebuah alat dimaksudkan untuk
dapat memberikan beberapa instruksi-instruksi yang akan dilakukan oleh alat
untuk melakukan tugas menggerakkan motor stepper sesuai dengan arah jarum
jam (Clock Wise) maupun berlawanan arah jarum jam (Counter Clock wise).
Instruksi yang diberikan pada alat melalui interface yang dirancang dalam
perancangan hadware, hal ini dimaksudkan untuk dapat dihubungkan antara
akuator alat dengan mikrokontroler ATMega8535 yang memiliki orde tegangan
48
alogoritma dan proses pembuatan programnya saja. Berikut ini diterangkan
beberapa langkah perancangan dan pembuatan alogoritma dan program alat:
Untuk perancangan alogoritma alat kita tentukan dari sub bab sebelumnya.
Perancangan sebuah alat yang baik harus terdapat tiga tahapan perancangan yaitu:
1. Desain kebutuhan Kontrol alat
Untuk instruksi dalam satu waktu yaitu eksekusi program utama
(digunakan untuk mengendalikan putaran motor serah jarum jam ataupun
berlawanan arah jarum jam)
Karena sistem tidak terlalu komplek maka penulis menggunakan satu
prosesor
Tingkat pemerograman yang digunakan adalah bahasa tingkat tinggi
menggunakan bahasa C, dilihat dari kemudahan dalam memerogram satu
embeaded system.
2. Susun skema mekanisme kontrol alat
Jenis prosesor yang digunakan adalah mikrokontroler jenis AVR dengan
seri ATMega8535
Skema alat sudah disusun terlebih dahulu sebelum membuat alogoritma Dalam langkah ini lebih pada perancangan penyusunnan alogoritma untuk
setiap fungsi yang akan digunakan, dalam Proyek Akhir ini penulis
menggunakan beberapa fungsi. Diantaranya fungsi putaran searah jarum
jam (clock wise) dan putaran berlawanan arah jarum jam (counter clock
wise).
3. Pengkodean (pembuatan sintaks program)
Pengkodean program dilakukan dengan menggunakan CodeVisionAVR
evaluation. Dengan menuliskan keterangan untuk setiap baris program
49
3.6Langkah-langkah pembuatan Alogoritma dan Program Alat
Pada perangkat yang dibangun dalam Proyek Akhir ini mempunyai
beberapa bagian kontrol, jadi dalam bab ini penulis membagi pembuatan
alogoritma dan programnya dalam beberapa bagian, yaitu:
Mengendalikan putaran motor stepper searah jarum jam (clock wise) Mengendalikan putaran motor stepper berlawanan arah jarum jam (counter
clock wise)
Pada dasarnya untuk kedua putaran diatas menggunakan perintah yang
hampir sama namun yang membedakan hanya rotasi bit pada kedua program
putaran tersebut.
50
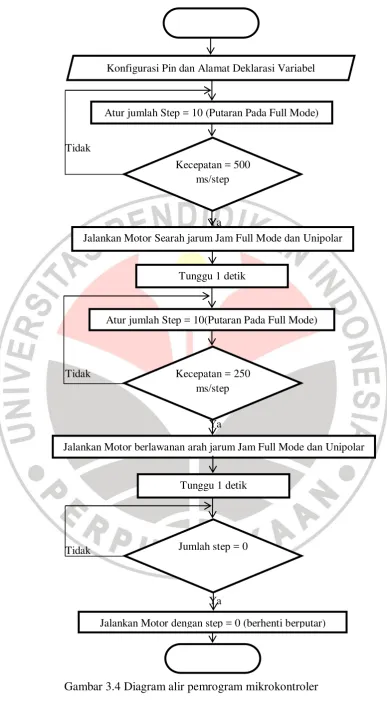
Gambar 3.4 Diagram alir pemrogram mikrokontroler Atur jumlah Step = 10 (Putaran Pada Full Mode)
Jalankan Motor Searah jarum Jam Full Mode dan Unipolar
Tunggu 1 detik
Atur jumlah Step = 10(Putaran Pada Full Mode)
Jalankan Motor berlawanan arah jarum Jam Full Mode dan Unipolar
Tunggu 1 detik
Jalankan Motor dengan step = 0 (berhenti berputar) Start
51
3.7Pembuatan program Alat
Dalam pembuatan program sistem pengendali motor stepper ini digunakan
software CodeVisionAVR Version 2.04.9 evaluation sebagai editor dan compiler.
Berikut ini merupakan langkah-langkah dalam pembuatan program system
pengendali motor stepper berbasis mikrokontroler atmega8535, yaitu:
1. Buka program CodeVisionAVR dengan cara Start menu pilih All Program
pilihCodeVisionAVR kemudian pilih CodeVisionAVR C Compiler.
Gambar 3.5 Tapilan pertama kali CodeVisionAVR
2. Untuk membuat project baru gunakan file pilihNewmaka akan muncul dua pilihan yaitu source atauproject. Karena kita mau mebuat project dulu maka pilih project.
Gambar 3.6 Konfirmasi membuat project atau file
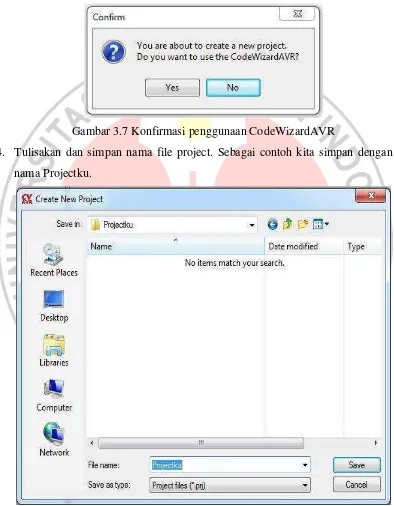
3. Setelah itu akan muncul konfirmasi apakah kita akan menggunakan fasilitas
52
CodeWizardAVR atau No jika tidak. Fasilitas CodeWizardAVR digunakan
untuk membangkitkan kode program secara otomatis sesuai menu-menu yang
telah tersedia. Untuk proyek akhir ini kita akan menuliskan program sendiri
sehingga kita pilih No.
Gambar 3.7 Konfirmasi penggunaan CodeWizardAVR
4. Tulisakan dan simpan nama file project. Sebagai contoh kita simpan dengan
nama Projectku.
53
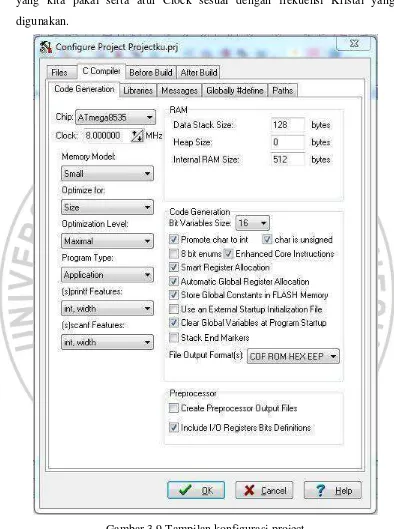
5. Pilih tab C Compiler kemudian pilih chip sesuai dengan IC mikrokontroler yang kita pakai serta atur Clock sesuai dengan frekuensi Kristal yang
digunakan.
Gambar 3.9 Tampilan konfigurasi project
6. Sampai disini telah selesai membuat file project baru. Langkah selanjutnya
54
cara: File lalu pilih New pilih Source. Setelah itu akan muncul jendela baru yang dapat digunakan untuk menulis program.
Kemudian setelah itu simpan file dengan caraFile lalu pilh Save dan beri nama, misalnya Test Run Stepper Motor.c
Setelah itu akan muncul jendela baru yang akan kita gunakan sebagai tempat
untuk menulis program.Dibawah ini merupakan contoh program Sitem
pengendali motor stepper.
Setelah kita tuliskan program diatas kemudian kita simpan dengan caraFile
lalu pilih Save dan beri nama Test Run Stepper Motor.c
7. Selanjutnya kita harus memasukkan file program ini (Test Run Stepper
Motor.c) kedalam file project yang telah kita buat sebelumnya(Projectku)
55
8. Langkah berikutnya adalah proses compile. Untuk mengkompile program
yang telah kita tuliskan tadi dilakukan dengan cara:
Project lalu pilih Make/Build (F9)
Gambar 3.10 Tampilan informasi hasil compile
Informasi di atas akan muncul pada akhir proses kompilasi. Dari informasi di
atas kita dapat mengetahui rangkuman proses compile project kita anatara lain
tentang chip mikrokontroler yang kita gunakan, dan tidak adanya eror dan
lain-56
lain. Apabila dalam proses Kompile ini terdapat eror, maka kita harus mencari
sumber eror tersebut kemudian memperbaikinya dan mengkompilenya
kembali sehingga tidak ada yang eror lagi. Jika proses kompile berjalan lancar
dan tidak ada eror lagi maka kan dihasilkan beberapa file baru antara lain
adalah file Rom file(*rom), Intel hex(*hex) dan Binary file (*bin). Dalam
project ini file dengan ekstensi *.hex inilah yang nantinya akan didownload ke
mikrokontroler.
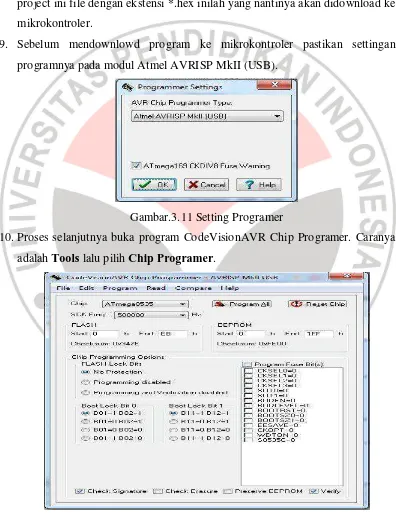
9. Sebelum mendownlowd program ke mikrokontroler pastikan settingan
programnya pada modul Atmel AVRISP MkII (USB).
Gambar.3.11 Setting Programer
10.Proses selanjutnya buka program CodeVisionAVR Chip Programer. Caranya
adalah Tools lalu pilih Chip Programer.
57
11.Buka file program yang akan didownlowd ke mikrokontroler. Caranya adalah
File lalu pilih Load FLASH kemudian pilih file dengn ekstensi *hex.
Gambar 3.13 Load to flash buffer
12.Download program ke mikrokontroler. Caranya dalah Program All
Gambar. 3.14. Proses mendownload program
Pada saat mendownload program ke mikrokontroler akan ada peringatan,
seperti gambar dibawah ini:
58
Pada peringatan tersebut kita pilih No karena kita tidak menggunakan
EEPROM, maka proses mendownload program akan dilanjutkan setelah kita pilih No.
Gambar. 3.16. Proses mendownload program
13.Setelah proses mendowload selesai, maka kita amati putaran motor Stepper
yang dihubungkan ke driver dan driver dihubungkan dengan port D
mikrokontroler.
14.Kemudian amati putaran motor jika motor berputar sesuai dengan perintah
BAB V
1. Motor stepper akanberputarserahjarum jam (clock wise)
setelahmenerimaperintahcontinuous runkemudian motor stepper
akanmenunggusetelahmenerimaperintahbrakekemudian motor stepper
akanberputarberlawananarahjarum jam (counter clock wise)
setelahmenerimaperintahpulse continuous run dan motor stepper
akanberhentisetelahmenerimaperintahstop.
2. Pembuatan program menggunakansoftware compilerdanmedia
editorCodeVisionAVR, sehinggamemberikankemudahandalampembuatan
program sistempengendali motor stepper berbasismikrokontroler
atmega8535 inidenganmeggunakanbahasa C.
3. Perangkat ISP (In- System Programing) yang terintegrasidengansistem
minimum sehinggamemudahkanfleksibilitasperubahan program
ataustrategipermainankarenapadasaatdilakukan download program, chip
tidakperluharusdilepasdarirangkaian.
5.2Saran
Dalammelakukanperancangan, pembuatansertapengujian program
danalatpenulismenemukanbeberapahal yang
harusdiperhatikandandikajilebihjauhlagiuntukpenyempurnaansistempengendali
74
1. Untukmengetahuiperbedaanantara motor stepper unipolar dan bipolar
sebaiknyamenggunakan motor stepper bipolar
jugasehinggadapatmembandingkanperbedaankedua motor
tersebutbaikdarisegikecepatan, step, dan lain-lain.
2. Adanyapenambahanfasilitasmelebihirancangan yang
dibuatdandiharapkandapatmemodifikasirangkaian yang telahada,
misalnyadenganmenggunakan port serial ataudapatmengendalikan motor
stepper lebihdarisatubuah motor stepper atau yang
lainnyadalammembangunsisteminikedepannya.
3. Untukpengimplementasiansistemdalamkehidupansehari-harimaka program
DAFTAR PUSTAKA
Andrianto, H. 20013. “PemerogramanMikrokontroler AVR ATmega16 MenggunakanBahasa C (CodeVisionAVR)”.Bandung: Informatika.
Bejo, A. 2008.“C dan AVR RahasiaKemudahanBahasa C dalamMikrokontroler ATMega8535”. Yogyakarta: GrahaIlmu.
Halim, S. 2007. “Merancang Mobile Robot PembawaObjekMenggunakanOOPic-R”. Jakarta: PT. Elex Media Komputindo.
Rachman, O. 2012. “PanduanPraktisMembuatRobotikdenganPemerograman C++”. Yogyakarta: Andi.
Rangkuti, S. 2011. “Mikrokontroler ATMEL AVR SimulasidanPraktikMenggunakan ISIS Proteus danCodeVisionAVR”.
Bandung: Informatika.
Supriadi, M. 2005. “Pemerograman IC PPI 8255 Menggunakan Delphi”.Yogyakarta: Andi.
Syahrul. 2012. “Mikrkontroler AVR ATmega8535”. Bandung: Informatika.
Winoto, A. 2010.“Mikrokontroler AVR ATmega8/16/32/8535 danPemerogramannyadenganBahasa C padaWinAVR”. Bandung: