RANCANG BANGUN PEMBERIAN PAKAN DAN MINUM
OTOMATIS PADA PETERNAKAN BEBEK BERBASIS
MIKROKONTROLER ATMEGA8535
TUGAS AKHIR
Disusun untuk memenuhi syarat kelulusan pada Program Studi Diploma Tiga Teknik Komputer
Oleh : Gilang Febirianto
10810037
Pembimbing
Irfan Dwiguna Sumitra, M.Kom
JURUSAN TEKNIK KOMPUTER
FAKULTAS TEKNIK DAN ILMU KOMPUTER
UNIVERSITAS KOMPUTER INDONESIA
BANDUNG
iv
BAB I PENDAHULUAN ... 1
1.1 Latar Belakang ... 1
1.2 Maksud dan Tujuan ... 2
1.3 Batasan Masalah ... 2
1.4 Metode Penelitian ... 2
1.5 Sistematika Penulisan ... 3
BAB II TEORI PENUNJANG ... 5
2.1 Perangkat Keras ... 5
2.1.1 Mikrokontroler Atmega 8535 ... 5
2.1.1.1 Kontruksi Mikrokontroler ATmega 8535 ... 6
2.1.1.2 Bahasa Pemograman pada AVR ATMega 8535 ... 7
2.1.2 Motor Power Window ... 7
2.1.3 Pelampung bensin ... 8
2.1.4 Pompa air mini ... 8
2.1.5 RTC DS1307 ... 8
2.1.6 Driver Motor L298N ... 10
2.1.7 IC ULN 2803 ... 11
2.1.8 LCD 16x2 ... 12
2.1.9 Buzzer ... 13
2.1.10 Push Buton ... 14
2.1.11 Limit Switch ... 14
2.1.12 Catu Daya ... 15
v
BAB III PERANCANGAN SISTEM ... 17
3.1 Perancangan Perangkat Keras... 17
3.2 Rangkaian Keseluruhan ... 19
3.2.1 Alokasi Pin Pada Mikrokontroler ATmega8535 ... 19
3.2.2 RTC (Real Time Clock) DS1307 ... 21
3.2.3 Driver Motor L298N ... 22
3.2.4 LCD 16x2 ... 22
3.3 Perancangan Desain Mekanik... 23
3.4 Perancangan Perangkat Lunak ... 25
BAB IV PENGUJIAN DAN ANALISA ... 31
4.1 Pengujian Catu Daya ... 31
4.2 Pengujian RTC DS1307 ... 31
4.3 Pengujian Buzzer ... 33
4.4 Pengujian Driver Motor ... 33
4.5 Pengujian Motor Power Window ... 35
4.6 Pengujian Pelampung dan Pompa Air Mini ... 35
4.7 Pengujian Komponen Keseluruhan ... 36
BAB V KESIMPULAN DAN SARAN ... 37
5.1 Kesimpulan ... 37
5.2 Saran ... 37
vi DAFTAR TABEL
Tabel 2.1 Konfigurasi Pin LCD 16x2 [7] ... 12
Tabel 3.1 Penggunaan I/O pada mikrokontroler ... 20
Tabel 3.2 Penggunaan I/O pada mikrokontroler (Lanjutan) ... 21
Tabel 3.3 Keterangan diagram alir pengaturan waktu pemberian pakan ... 27
Tabel 3.4 Keterangan diagram alir pemberian pakan bebek otomatis. ... 29
Tabel 3.5 Keterangan diagram alir pemberian minum... 30
Tabel 4.1 Pengujian Catu Daya ... 31
Tabel 4.2 Logika Motor power window 1 ... 34
Tabel 4.3 Logika Motor power window 2 ... 34
Tabel 4.4 Pengujian Pelampung dan Pompa air mini ... 36
vii
DAFTAR GAMBAR
Gambar 2.1 Konfigurasi Pin ATmega8535 [1] ... 6
Gambar 2.2 Blok diagram fungsional ATmega8535 [1] ... 7
Gambar 2.3 Konfigurasi Pin DS1307[4] ... 9
Gambar 2.4 Blok Diagram Circuit DS1307 ... 9
Gambar 2.5 (a) Bentuk fisik (b) DS1307 Circuit [9] ... 10
Gambar 2.6 IC driver motor L298N [2] ... 11
Gambar 2.7 IC ULN 2803 [8] ... 11
Gambar 2.8 LCD 16x2 [6] ... 13
Gambar 2.9 Buzzer (a) bentuk fisik dan (b) alokasi pin [6] ... 14
Gambar 2.10 Push buton ... 14
Gambar 2.11 Limit Switch ... 15
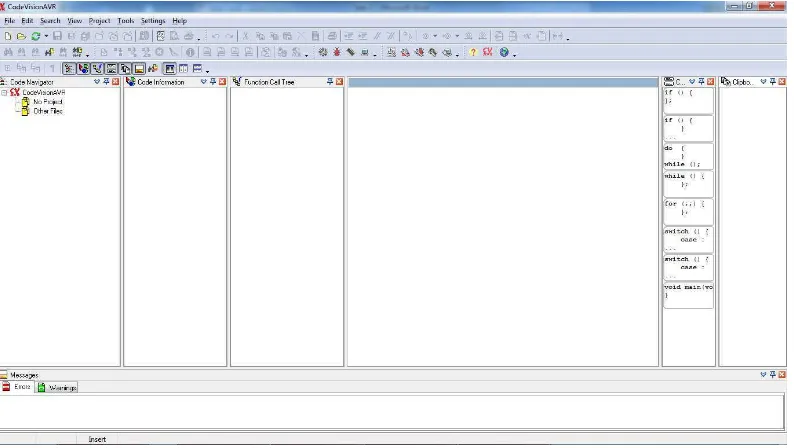
Gambar 2.12 Tampilan antarmuka Codevision AVR ... 16
Gambar 3.1 Diagram Blok Rancang Bangun Pemberian Pakan Bebek Otomatis 17 Gambar 3.2 Rangkaian keseluruhan mikrokontroler dengan komponen lain. ... 19
Gambar 3.3 Alokasi pin pada mikrokontroler ATmega8535 ... 20
Gambar 3.4 Rangkaian RTC (Real Time Clock) ... 22
Gambar 3.5 Rangkaian Driver Motor L298N ... 22
Gambar 3.6 Rangkaian LCD 16x2 ... 23
Gambar 3.7 Desain mekanik alat pemberian pakan bebek otomatis (a) Desain mekanik utama, (b) Desain penampung air... 24
Gambar 3.8 Desain kotak penyimpanan komponen (a) kotak 1 pengaturan jadwal pemberian pakan, (b) kotak 2 komponen utama tampak samping, (c) kotak 2 komponen utama tampak atas. ... 25
Gambar 3.9 Diagram Alir Pengaturan Waktu ... 26
Gambar 3.10 Diagram Alir Pemberian Pakan... 28
Gambar 3.11 Diagram Alir Pemberian air minum ... 30
Gambar 4.1 Tampilan Jam dan Tanggal pada LCD ... 32
viii
Gambar 4.3 Kondisi pakan dengan limit switch (a) Limit switch tertekan (b) Limit
Switch tidak tertekan ... 33
Gambar 4.4 Motor power window 1 pembuka katup pakan ... 34
Gambar 4.5 Motor Power Window 2 penggerak kotak pakan ... 34
38
[1] ATMEL. (n.d.). ATmega8535. Retrieved 01 13, 2013, from www.atmel.com/datasheet/ATmega8535
[2] Bejo, A. (2008). Rahasia Kemudahan Bahasa C dalam Mikrokontroler ATMega8535. Yogyakarta: Graha Ilmu.
[3] Danang. (2007). Buzzer. Retrieved 01 11, 2014, from http://elektronika-elektronika.blogspot.com/2007/04/buzzer.html
[4] Gheschik, S. R., Akhmad, H., & Paulus, S. W. (2011). Sistem Otomatisasi Pemberian Makan Serta Peletakkan Posisi Telur Pada Sebuah Kandang Burung Puyuh. Jurnal Teknik Elektronika, Politeknik Elektronika Negeri Surabaya , 1-8.
[5] Octavica, I. S. (2006). Alat Pemberi Pakan Ternak Secara Otomatis Berbasis Mikrokontroler AT89C51.
[6] Purwanto. (2010). LCD 16x2. Retrieved 01 12, 2014, from http://www.mikrokontroller.tk/category/mikrokontroller/teori-dasar/
[7] Suyadhi, T. D. (2013). Driver L298N Retrieved 2 10, 2014, from http://www.robotics-university.com/2013/09/ROBOT-1-Driver-Motor-411.html
[8] Toshiba. (n.d.). ULN2803,04APG/AFWG. Retrieved 01 13, 2013, from www.semicon.toshiba.co.jp/
[9] Unikom. (2010, 02 15). Elib unikom. Retrieved 01 03, 2014, from elib.unikom.ac.id/download.php?id=42854
ii
KATA PENGANTAR
Segala puji bagi Allah SWT., Pencipta dan Pemelihara alam semesta, shalawat serta salam semoga terlimpah bagi Nabi Muhammad SAW., keluarga dan para pengikutnya yang setia hingga akhir masa.
Atas rahmat Allah SWT., akhirnya Penulis dapat menyelesaikan Tugas Akhir ini, meskipun proses belajar sesungguhnya tak akan pernah berhenti. Tugas Akhir ini sesungguhnya bukanlah sebuah kerja individual dan akan sulit terlaksana tanpa bantuan banyak pihak yang tak mungkin Penulis sebutkan satu persatu, namun dengan segala kerendahan hati, Penulis mengucapkan terima kasih kepada:
1. Kedua Orang Tua, kakak, adik dan keluarga besar tercinta yang senantiasa tidak henti-hentinya berdo’a mencurahkan cinta, kasih sayang, perhatian, nasihat, serta motivasi sehingga Penulis dapat menyelesaikan tugas akhir ini.
2. Bapak Prof. Dr. H. Denny Kurniadie, Ir., M.Sc. selaku Dekan Fakultas Teknik dan Ilmu Komputer Universitas Komputer Indonesia.
3. Bapak Dr. Wendi Zarman, M.Si., selaku Ketua Jurusan Teknik Komputer Universitas Komputer Indonesia.
4. Bapak Taufiq Nizwar, M.Si., selaku dosen wali yang telah banyak memberikan arahan, saran, nasihat, motivasi dan bimbingan kepada Penulis selama menempuh studi.
5. Bapak Irfan Dwiguna Sumitra, M.Kom selaku Pembimbing yang telah banyak memberikan arahan, saran, nasihat, motivasi dan bimbingan kepada Penulis selama menyelesaikan tugas akhir ini.
iii
7. Teman-teman di Laboratorium Sistem Digital terima kasih atas dukungannya.
8. Teman-teman angkatan 2010, khususnya kelas 10 TK-5 yang telah banyak membantu selama studi maupun selama proses pengerjaan Tugas Akhir.
9. Semua pihak yang telah banyak membantu yang tidak dapat Penulis sebutkan satu persatu, terima kasih banyak atas bantuan, dukungan dan motivasinya selama melaksanakan studi dan menyelesaikan Tugas Akhir ini.
Akhirnya, Penulis berharap semoga penelitian ini menjadi sumbangsih yang bermanfaat bagi dunia sains dan teknologi di Indonesia, khususnya disiplin keilmuan yang Penulis dalami.
1 pemberian pakan bebek harus terjadwal dan air minum yang harus tetap tersedia. Bagi peternak yang memiliki jumlah bebek yang banyak, dapat menjadi tugas yang sulit untuk menjaga persedian pakan dan air minum setiap waktu.
Pada umumnya peternak menaburkan pakan pada tempat pakan menggunakan tangan dan berjalan sepanjang kandang yang mana kandang sangatlah luas dan itu dilakukan setiap pagi, sore dan malam. Sedangkan, untuk pemberian minum peternak umumnya mengisi ulang tempat minum setiap 6 jam sekali. Kegiatan seperti itu bagi peternak bebek cukup menghabiskan waktu dan tenaga.
Rancang bangun pemberian pakan bebek otomatis ini bertujuan untuk mempermudah para peternak dalam memberikan pakan. Dimana pada saat ini pemberian pakan di beberapa daerah masih menggunakan cara manual untuk memberikan pakan pada bebek.
Berdasarkan hal-hal yang disebutkan di atas, maka penulis mengambil judul tugas akhir tentang “Rancang Bangun Pemberian Pakan dan Minum Otomatis Pada Peternakan Bebek Berbasis Mikrokontroler Atmega8535”.
1.2 Maksud dan Tujuan
Rancang bangun pemberian pakan bebek otomatis ini bertujuan untuk meringankan beban para peternak bebek dalam memberikan pakan kepada bebek peliharaannya, membuat pemberian pakan dan air minum menjadi terjadwal setiap harinya.
1.3 Batasan Masalah
Adapun batasan masalah dalam pembuatan rancang bangun pemberian pakan bebek otomatis adalah :
1. Volume pakan yang keluar dari drum penampungan tidak dapat diatur secara otomatis.
2. Jadwal pemberian pakan maksimal 3 kali dalam sehari. 3. Panjang rel untuk penyaluran pakan bebek hanya 1,5 Meter. 4. Panjang tempat pakan bebek hanya 1 Meter.
5. Pakan yang dapat digunakan hanya pakan kering (pur atau dedak).
1.4 Metode Penelitian
Metode penelitian yang dilakukan dalam penyelesaian Tugas Akhir ini meliputi:
1. Observasi
Merupakan metode pengumpulan data dengan mengamati secara langsung terhadap hal-hal yang dipelajari selama pembuatan perancangan alat ini, juga dengan cara mengajukan pertanyaan secara langsung kepada pihak-pihak yang mengetahui hal-hal yang dipelajari.
2. Studi Kepustakaan
3
media internet yang berhubungan dengan masalah yang menjadi topik dalam perancangan alat ini.
3. Perancangan
Perancangan ini dimaksudkan untuk mengaplikasikan teori yang diperoleh dalam perancangan sistem untuk perangkat keras, perangkat lunak dan pengujian sistem. Setelah didapatkan suatu rancangan kemudian direalisasikan ke alat.
4. Percobaan
Melakukan uji coba perangkat keras dan perangkat lunak meliputi pengujian setiap komponen yang digunakan.
5. Analisa Data
Analisa yang dilakukan dari pengujian sistem dan mengambil sebuah simpulan dari penelitian ini.
1.5 Sistematika Penulisan
Tugas akhir ini tersusun dari beberapa bab pembahasan, dimana sistematika penulisannya adalah sebagai berikut:
BAB I : PENDAHULUAN
Bab ini mencakup latar belakang masalah, maksud dan tujuan, batasan masalah, metode penelitian dan sistematika penulisan. BAB II : TEORI PENUNJANG
Bab ini mengemukakan dan menjelaskan teori-teori pendukung yang digunakan dalam perencanaan dan perancangan tugas akhir. BAB III : PERANCANGAN SISTEM
Bab ini mengemukakan tentang perancangan alat untuk tugas akhir, meliputi garis besar sistem, perancangan mekanik, perangkat keras dan perangkat lunak yang digunakan sehingga menjadi suatu alat
BAB IV : HASIL PENGUJIAN DAN ANALISA
Bab ini berisi tentang pengujian-pengujian serta analisa perangkat keras dan perangkat lunak, analisa kelayakan perancangan elektronik dan pengintegrasian sistem secara keseluruhan.
BAB V : KESIMPULAN DAN SARAN
5
BAB II
TEORI PENUNJANG
Pada bab ini akan dibahas dasar teori yang digunakan dalam rancang bangun pemberian pakan bebek dan minum otomatis pada peternakan bebek berbasis mikrokontroler atmega8535. Pembahasan berisi tentang perangkat keras dan perangkat lunak yang digunakan.
2.1 Perangkat Keras
2.1.1 Mikrokontroler Atmega 8535
Mikrokontroler merupakan sistem komputer yang dikemas menjadi sebuah
chip di mana di dalamnya sudah terdapat Mikroprosesor, I/O, Memori bahkan ADC. Tidak seperti sistem komputer yang mampu menangani berbagai macam program aplikasi, mikrokontroler hanya bisa digunakan untuk suatu aplikasi tertentu saja, perbedaan lainnya terletak pada perbandingan RAM dan ROM. Pada sistem komputer perbandingan RAM dan ROM-nya besar, artinya program-program pengguna disimpan dalam ruang RAM yang relatif besar, sedangkan antar muka perangkat keras disimpan dalam ruang ROM yang kecil dan pada mikrokontroler perbandingan ROM dan RAM yang besar, artinya program kontrol disimpan dalam ROM yang ukurannya relatif lebih besar, sedangkan RAM digunakan sebagai tempat penyimpanan sementara termasuk register-register yang digunakan pada mikrokontroler yang bersangkutan. [10]
AVR ATMega 8535 merupakan IC CMOS 8-bit yang memiliki daya rendah dalam pengoperasiannya dan berbasis pada arsitektur Reduced Intruction Set Computing (RISC) AVR ATMega8535 dan dapat mengeksekusi satu intruksi dalam sebuah siklus clock serta dapat mencapai 1 Million Of Intructions per Second (MIPS)per Mhz, sehingga para perancang dapat mengoptimalkan penggunaan daya rendah dengan kecepatan yang tinggi. Mikrokontroler ini memiliki beberapa fitur, diantaranya: [1]
1. Sistem mikroprosesor 8 bit berbasis RISC dengan kecepatan maksimal 16 MHz.
3. 512 Bytes Electronically Erasable Progmmable Read Only Memory ( EEPROM).
4. 512 Bytes Static Random Access Memory (SRAM) internal. 5. 8 channel, 10 bit resolusi ADC.
6. 4 channel PWM. 7. 2 timer/counter 8 bit. 8. 1 timer/counter 16 bit.
9. 32 general purpose Input/Output (I/O). 10. 32 general purposeregister.
11. Interrupt internal dan eksternal
Di bawah ini adalah konfigurasi pin pada Atmega8535 :
Gambar 2.1 Konfigurasi Pin ATmega8535 [1]
2.1.1.1 Kontruksi Mikrokontroler ATmega 8535
Salah satu keluarga mikrokontroler AVR yaitu AVR ATMega8535 yang memiliki daya rendah dalam pengoprasiannya, ATMega8535 mempunyai 40 kaki dan 32 kaki diantaranya digunakan untuk keperluan port paralel setiap port paralel terdiri dari delapan pin sehingga terdapat empat port, yaitu portA, portB,
7
Gambar 2.2 Blok diagram fungsional ATmega8535 [1]
2.1.1.2 Bahasa Pemograman pada AVR ATMega 8535
Untuk menjalankan sebuah mikrokontroler tentunya perlu pemograman yang dibutuhkan, pemograman yang ada pada AVR ATmega8535 yaitu pemograman menggunakan bahasa assembler, bahasa Basic dan bahasa C dimana dari ketiga bahasa tersebut tentunya mempunyai keunggulan masing-masing, untuk bahasa assembler dapat diminimalisasi penggunaan memori program sedangkan dengan bahasa C menawarkan kecepatan dalam pembuatan program. Untuk bahasa assembler dapat digunakan AVR Studio, dan untuk bahasa Basic menggunakan software Bascom sedangkan bahasa C perlu menggunakan AVR
Studio yang dikolaborasikan dengan WinAVR. Adapun software yang bisa digunakan untuk pemograman dengan bahasa C yaitu CodeVision AVR.[1]
2.1.2 Motor Power Window
2.1.3 Pelampung bensin
Pelampung bensin biasanya digunakan pada tangki bensin untuk sepeda motor atau mobil, pelampung berfungsi untuk mengetahui apakah bensin yang berada pada tangki bensin masih tersedia atau tidak, Tetapi pada rancang bangun pemberian pakan bebek ini pelampung digunakan sebagai sensor ketinggian air, dimana jika air berada pada titik tertentu maka pompa air mini akan mengalirkan air sampai pelampung berada pada titik tertentu.
2.1.4 Pompa air mini
Pompa adalah mesin atau peralatan mekanis yang digunakan untuk menaikkan cairan dari dataran rendah ke dataran tinggi atau untuk mengalirkan cairan dari daerah bertekanan rendah kedaerah yang bertekanan tinggi dan juga sebagai penguat laju aliran pada suatu sistem jaringan perpipaan.
2.1.5 RTC DS1307
Real-time clock disingkat RTC adalah jam di komputer yang umumnya berupa sirkuit terpadu yang berfungsi sebagai pemelihara waktu. RTC umumnya memiliki catu daya terpisah dari catu daya komputer (umumnya berupa baterai litium) sehingga dapat tetap berfungsi ketika catu daya komputer terputus. Kebanyakan RTC menggunakan oskilator kristal. Tipe DS1307 merupakan jenis pewaktu yang menggunakan komunikasi serial untuk operasi tulis baca, dengan spesifikasi berikut ini: [9]
1. Real-time clock (RTC) meyimpan data-data detik, menit, jam, tanggal, bulan, hari dalam seminggu, dan tahun valid hingga 2100.
2. 56-byte, battery-backed, RAM nonvolatile (NV) RAM untuk penyimpanan.
3. Antarmuka serial Two-wire (I2C).
4. Sinyal luaran gelombang-kotak terprogram (Programmable squarewave); 5. Konsumsi daya kurang dari 500nA menggunakan mode batrerai
cadangan dengan operasional osilator.
9
X X
VBA GND
VCC
SQW/OU SCL SDA 1
4 5
8
Gambar 2.3 Konfigurasi Pin DS1307[4]
1. X1 dan X2 = Oscillator Crystal 32,768KHz 2. VBAT = Battery Input(+3V)
3. GND = Ground 4. SDA = Serial Data 5. SCL = Serial Clock Input
6. SQW/OUT = Square Wave/Output Driver 7. VCC = Supply Power
Blok diagram internal DS1307 adalah: [4]
Gambar 2.4 Blok Diagram Circuit DS1307
2. Power Control merupakan catu daya yang mensuplay tegangan ke DS1307, Vcc adalah daya luar sebesar 5V dan VBAT sebagai suplai input
dengan 3V lithium Cell. Tegangan baterei harus berada diantara batasan minimum dan maksimum pengoperasian. Baterei lithium 48mAh atau lebih dapat mempertahankan fungsi RTC selama 10 tahun.
3. Serial Bus Interface And Address Register merupakan jalur data serial dan pengalamatan register DS1307 dengan akses pulsa melalui SCL dan SDA. SCL (Serial Clock) berfungsi sebagai clock input I2C dan digunakan untuk sinkronisasi data serial. SDA (Serial Data) berfungsi sebagai data input/output untuk I2C serial, baik SCL dan SDA masih memerlukan pull up eksternal.
4. Control Logic merupakan pengendali data-data yang dibaca ataupun ditulis melalui SCL dan SDA dengan pewaktu dari osilator kristal.
5. Buffer (7 bytes) adalah penyangga sementara sebelum data diterima atau dikirim, berkisar 7 bytes (7 x 8 bit) sebagai transit pengalamatan register 8 bit detik-menit-jam-hari-tanggal-bulan-tahun.
6. Clock, Calender and Control Register atau CR berisi informasi clock dan kalender serta register pengendali untuk mengontrol pengoperasian SQW/OUT.
Bentuk fisik dan rangkaian pengoperasian DS1307 adalah sebagai berikut:
Gambar 2.5 (a) Bentuk fisik (b) DS1307 Circuit [9]
2.1.6 Driver Motor L298N
L298N adalah IC yang dapat digunakan sebagai driver motor DC. IC ini menggunakan prinsip kerja H-Bridge. Tiap H-Bridge dikontrol menggunakan
(a)
11
level tegangan TTL yang berasal dari output mikrokontroler. L298 dapat mengontrol 2 buah motor DC. Tegangan yang dapat digunakan untuk mengendalikan robot bisa mencapai tegangan 46 VDC dan arus 2 A untuk setiap kanalnya. Berikut adalah gambar 2.6 bentuk IC L298 yang digunakan sebagai motor driver. [5]
Gambar 2.6 IC driver motor L298N [2]
2.1.7 IC ULN 2803
ULN 2803 yaitu sebuah IC yang dirancang dengan seri tegangan tinggi, yang terdiri dari delapan buah transistor NPN yang terhubung dalam suatu keluarga array secara ideal. IC ULN 2803 berfungsi sebagai penguat arus karena keluaran tegangan dari mikrokontroler tidak dapat mencatu daya relay secara langsung. Untuk rangkaian dalam dari IC ULN 2803 dapat dilihat pada gambar 2.7. [8]
Gambar 2.7 IC ULN 2803 [8]
Adapun fitur yang terdapat dalam IC ULN 2803 yaitu:
1. Arus output menghasilkan output tunggal dimana output maksimal pada 500 mA.
2. Tinggi tegangan output pendukung 50 V.
2.1.8 LCD 16x2
Modul LCD berukuran 16 karakter x 2 baris 16 pin yang terdiri dari 8 jalur data, 3 jalur kontrol dan jalur-jalur catu daya, secara ringkas fungsi pin-pin pada LCD dituliskan pada Tabel 2.1. [7]
Tabel 2.1 Konfigurasi Pin LCD 16x2 [7]
PIN NUMBER SYMBOL FUNCTION
1 Vss GND
2 Vdd +3v or +5v
3 Vo Contrast Adjustment
4 RS H/L Register Select Signal
15 A/Vee + 4.2V for LED Negative Voltage Output
16 K Power Supply for B/L (0V)
Sedangkan secara umum pin-pin LCD diterangkan sebagai berikut : [7]
1. Pin 1 dan 2 merupakan sambungan catu daya, Vss dan Vdd. Pin Vdd dihubungkan dengan tegangan positif catu daya, dan Vss pada 0V atau
ground. Meskipun data menentukan catu 5 Vdc (hanya pada beberapa mA), menyediakan 6V dan 4.5V yang keduanya bekerja dengan baik, bahkan 3V cukup untuk beberapa modul.
2. Pin 3 merupakan pin kontrol Vee, yang digunakan untuk mengatur kontras
13
dengan kebutuhan, pin ini dapat dihubungkan dengan variable resistor sebagai pengatur kontras.
3. Pin 4 merupakan Register Select (RS), masukan yang pertama dari tiga
command control input. Dengan membuat RS menjadi high, data karakter dapat ditransfer dari dan menuju modulnya.
4. Pin 5 Read/Write (R/W), untuk memfungsikan sebagai perintah write maka R/W low atau menulis karakter ke modul. R/W high untuk membaca data karakter atau informasi status dari register-nya.
5. Pin 6 Enable (E), input ini digunakan untuk transfer aktual dari perintah-perintah atau karakter antara modul dengan hubungan data. Ketika menulis ke
display, data ditransfer hanya pada perpindahan high atau low. Tetapi ketika membaca dari display, data akan menjadi lebih cepat tersedia setelah perpindahan dari low ke high dan tetap tersedia hingga sinyal low lagi.
6. Pin 7 sampai 14 adalah delapan jalur data/data bus (D0 sampai D7) dimana data dapat ditransfer ke dan dari display.
7. Pin 16 dihubungkan kedalam tegangan 5 Volt untuk memberi tegangan dan menghidupkan lampu latar/Back Light LCD.
Berikut adalah gambar 2.8 LCD 16x2 :
Gambar 2.8 LCD 16x2 [6]
2.1.9 Buzzer
arah arus dan polaritas magnetnya, karena kumparan dipasang pada diafragma maka setiap gerakan kumparan akan menggerakkan diafragma secara bolak-balik sehingga membuat udara bergetar yang akan menghasilkan suara. Buzzer biasa digunakan sebagai indikator bahwa proses telah selesai atau terjadi suatu kesalahan pada sebuah alat (alarm). Gambar 2.9 merupakan bentuk fisik dari sebuah buzzer. [6]
(a) (b)
Gambar 2.9 Buzzer (a) bentuk fisik dan (b) alokasi pin [6]
2.1.10 Push Buton
Switch push buton adalah sebuah saklar yang berfungsi sebagai pemutus dan penghubung dari suatu instalasi listrik. Cara kerja dari push buton selama bagian knopnya ditekan maka alat ini bekerja sehingga kontak-kontaknya akan terhubung untuk jenis normally open dan akan terlepas untuk jenis normally close, dan sebaliknya ketika knopnya lepas kembali maka kebalikan dari sebelumnya. Bisa dilihat pada gambar 2.10.
Gambar 2.10 Push buton
2.1.11 Limit Switch
15
digunakan secara terus menerus sebagai peralatan mekanik akhirnya akan rusak, dan limit switch membutuhkan sejumlah tekanan fisik untuk digerakkan.
Gambar 2.11 Limit Switch
2.1.12 Catu Daya
Catu daya merupakan sumber tenaga bagi alat yang akan dirancang. Catu daya yang digunakan adalah sebuah adaptor 12v dengan arus 8A. Adaptor adalah perangkat elektronik yang dapat merubah tegangan listrik (AC) yang tinggi menjadi tegangan listrik (DC) yang rendah. Keuntungan dari adaptor dibanding dengan baterai maupun accumulator adalah sangat praktis berhubungan dengan ketersediaan tegangan, karena adaptor dapat di ambil dari sumber tegangan AC yang ada di rumah. Selain itu, adaptor mempunyai jangka waktu yang tidak terbatas jika ada tegangan AC, tegangan AC ini sudah merupakan kebutuhan primer dalam kehidupan manusia.
2.2 Perangkat Lunak
Pengembangan sebuah sistem menggunakan mikrokontroler AVR buatan
Atmel, menggunakan perangkat lunak AVR Studio dan Codevision AVR.AVR
Studio merupakan perangkat lunak khusus untuk bahasa assembly yang mempunyai
fungsi sangat lengkap, yaitu digunakan untuk menulis program, kompilasi, simulasi
dan download program ke IC mikrokontroler AVR.
Codevision AVR merupakan perangkat lunak C-cross compiler, dimana
program dapat ditulis dalam bahasa C. Codevision memiliki IDE (Integrated
Development Environment) yang lengkap, dimana penulisan program, compile, link,
pembuatan kode mesin (assembler) dan download program ke chip AVR dapat
dilakukan pada Codevision sendiri. Selain itu, ada fasilitas terminal, yaitu untuk
melakukan komunikasi serial dengan mikrokontroler yang sudah diprogram. Proses
download program ke IC mikrokontroler AVR dapat menggunakan sistem download
mengijinkan memori program untuk diprogram ulang dalam sistem menggunakan
hubungan serial SP. Untuk tampilan Codevision AVR dapat dilihat pada gambar 2.12
di bawah ini. [9]
17
BAB III
PERANCANGAN SISTEM
Perancangan sistem secara umum dapat dibagi kedalam tiga bagian, yaitu perancangan perangkat keras, perancangan desain mekanik dan perancangan perangkat lunak. Perancangan perangkat keras terdiri dari perancangan berbagai komponen elektrik yang digunakan dalam sistem. Perancangan desain mekanik terdiri dari beberapa komponen mekanik yang berfungsi sebagai penunjang dari perangkat keras dan perancangan piranti lunak terdiri dari perancangan program-program yang digunakan dalam sistem.
3.1 Perancangan Perangkat Keras
Pada perancangan ini, akan dijelaskan mengenai perancangan dalam pembuatan perangkat keras dan komponen-komponen utama pembentuk sistem yang dibuat. Gambar 3.1 menunjukkan diagram blok sistem yang akan dirancang.
RTC
Gambar 3.1 Diagram Blok Rancang Bangun Pemberian Pakan Bebek Otomatis
Keterangan Gambar :
1. Catu daya : Digunakan sebagai sumber tenaga bagi alat.
2. RTC (Real Time Clock) : Penggunaan RTC nantinya akan dihubungkan dengan mikrokontroller yang digunakan sebagai pewaktuan dalam
3. Limit Switch : Berfungsi sebagai saklar pada saat kotak penyaluran pakan bergerak ke kanan atau ke kiri. Limit switch berfungsi juga sebagai sensor pakan yang ada didalam drum penampungan utama.
4. Push Button : Berfungsi sebagai menu, set, up dan down pada pengaturan jam. 5. Pelampung : Berfungsi sebagai sensor ketinggian air.
6. Mikrokontroler ATMega8535 : berfungsi sebagai pengolahan data sehingga dapat berkomunikasi baik dengan komponen elektronik lainnya.
7. LCD16x2 : Digunakan untuk tampilan waktu seperti jam, menit, tanggal, bulan dan tahun.
8. Buzzer : Berfungsi sebagai alarm jika drum penampung utama kosong maka
buzzer akan mengeluarkan suara.
9. Driver Motor : Berfungsi untuk mengendalikan motor power window. 10.Motor Power Window 1 : Berfungsi sebagai pembuka katup drum
penampungan pakan utama.
11.Motor Power Window 2 : Berfungsi sebagai penggerak atau sebagai roda kotak pakan agar dapat bergerak ke kanan dan ke kiri.
12.ULN 2803 : Berfungsi sebagai penguat untuk mengaktifkan pompa mini. 13.Pompa Mini : Digunakan untuk menyedot air untuk disalurkan ke tempat
19
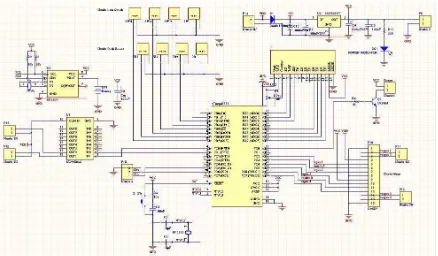
3.2 Rangkaian Keseluruhan
Berikut rangkaian keseluruhan antara mikrokontroler ATmega8535 dengan
RTC (Real Time Clock) DS1307, Driver motor L298N, LCD 16x2 dan buzzer.
Gambar 3.2 Rangkaian keseluruhan mikrokontroler dengan komponen lain.
3.2.1 Alokasi Pin Pada Mikrokontroler ATmega8535
Pada perancangan pemberian pakan bebek otomatis, mikrokontroler digunakan untuk menerima input dari push button dan limit switch. Kemudian
input dari push button dan limit switch akan diterima oleh mikrokontroler dan mikrokontroler akan mengolah data yang telah diterima. Dimana push button
Gambar 3.3 Alokasi pin pada mikrokontroler ATmega8535
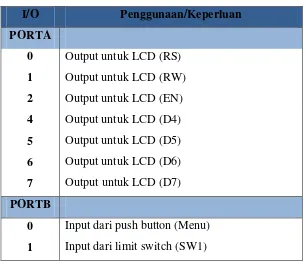
Di bawah ini adalah table 3.1 dari penggunaan I/O pada rangkaian mikrokontroler di atas.
Tabel 3.1 Penggunaan I/O pada mikrokontroler
I/O Penggunaan/Keperluan
PORTA
0 Output untuk LCD (RS) 1 Output untuk LCD (RW) 2 Output untuk LCD (EN) 4 Output untuk LCD (D4) 5 Output untuk LCD (D5) 6 Output untuk LCD (D6) 7 Output untuk LCD (D7) PORTB
21
Tabel 3.2 Penggunaan I/O pada mikrokontroler (Lanjutan)
2 Input dari push button (Set) 3 Input dari limit switch (SW2) 4 Input dari push button (Up) 5 Input dari limit switch (SW3) 6 Input dari push button (Down) 7 Input dari limit switch (SW4) PORTC
0 Output untuk buzzer
2 Output untuk motor power window (input1) 3 Output untuk motor power window (Enable A) 4 Output untuk motor power window (input2) 5 Output untuk motor power window (input3) 6 Output untuk motor power window (Enable B) 7 Output untuk motor power window (input4) PORTD
0 Output ke IC ULN2803 (in1) 1 Output ke IC ULN2803 (in2)
5 Input dari RTC (Real Time Clock) (SCL) 6 Input dari RTC (Real Time Clock) (SDA)
3.2.2 RTC (Real Time Clock) DS1307
Gambar 3.4 Rangkaian RTC (Real Time Clock)
3.2.3 Driver Motor L298N
Pada perancangan pemberian pakan bebek otomatis driver motor L298N, berfungsi sebagai penggerak motor power window, dimana motor power window
ini digunakan untuk roda pada kotak penyebaran pakan, yang akan bergerak ke kanan dan ke kiri secara otomatis. Untuk contoh rangkaian bisa dilihat pada gambar 3.5.
Gambar 3.5 Rangkaian Driver Motor L298N
3.2.4 LCD 16x2
23
untuk menampilkan waktu seperti jam, menit, tanggal, bulan dan tahun. Untuk rangkaian LCD bisa dilihat pada gambar 3.6 di bawah ini.
Gambar 3.6 Rangkaian LCD 16x2
3.3 Perancangan Desain Mekanik
Pada perancangan mekanik rancang bangun pemberian pakan bebek otomatis berbasis mikrokontroler atmega8535 desain dibuat dengan panjang 1,5 m tinggi 85 cm dan lebar 32 cm. untuk lebih jelasnya bisa dilihat pada gambar 3.7 di bawah ini.
(b)
Gambar 3.7 Desain mekanik alat pemberian pakan bebek otomatis (a) Desain mekanik utama, (b) Desain penampung air.
Penempatan Komponen :
1. Galon air ditempatkan paling atas sebagai drum penampungan pakan bebek. 2. Limit Switch ditempatkan di dalam gallon yang berfungsi sebagai sensor
pakan.
3. Motor power window 1 ditempatkan di bawah galon, yang berfungsi sebagai pembuka katup.
4. Kotak pakan yang terbuat dari akrilik.
5. Limit switch 1 ditempatkan disebelah kanan bawah.
6. Motor power window 2 ditempatkan di dalam kotak pakan yang berfungsi sebagai roda.
7. Limit switch 2 ditempatkan di sebelah kiri bawah agar tertekan oleh roda. 8. Tempat pakan ditempatkan di bawah.
9. Pompa air mini ditempatkan disebelah kiri atas. 10.Pelampung ditempatkan disebelah kanan.
25
(a) (b) (c)
Gambar 3.8 Desain kotak penyimpanan komponen (a) kotak 1 pengaturan jadwal pemberian pakan, (b) kotak 2 komponen utama tampak samping, (c) kotak 2
komponen utama tampak atas.
Penempatan Komponen :
1. Pada kotak 1 terdapat 1 buah LCD 16x2 dan 4 buah push button dibagian bawahnya.
2. Pada kotak 2 tampak samping ada saklar on/off disebelah kiri, port ISP ditengah dan catu daya yang berada disebelah kanan.
3. Pada kotak 2 tampak atas ada sebuah kipas AC 220v.
3.4 Perancangan Perangkat Lunak
Pada perancangan lunak dijelaskan bagaimana diagram alir yang ada pada rancang bangun pemberian pakan bebek otomatis. Gambar 3.9 di bawah ini menunjukan diagram alir mulai dari diagram alir pengaturan waktu, diagram alir pemberian pakan dan diagram alir pemberian air minum.
Start
A = Berapa detik katup pakan terbuka B = Berapa kali kotak pakan bergerak *Keterangan :
27
Di bawah ini adalah table 3.3 keterangan dari diagram alir pengaturan waktu pemberian pakan.
Tabel 3.3 Keterangan diagram alir pengaturan waktu pemberian pakan
No Keterangan
1 Memulai program
2 Inisialisasi variable jam, menit, tanggal, bulan, tahun 3 LCD akan menampilkan tampilan
4 Seleksi kondisi apakah akan setting waktu 5 Jika ya setting jam, menit, tanggal, bulan, tahun 6 Seleksi kondisi apakah akan setting jadwal pagi 7 Jika ya setting jadwal untuk jam pagi
8 Seleksi kondisi apakah akan setting jadwal sore 9 Jika ya setting jadwal untuk jam sore
10 Seleksi kondisi apakah akan setting jadwal malam 11 Jika ya setting jadwal untuk jam malam
12 Seleksi kondisi apakah akan setting pembuka pakan 13 Jika ya setting pembuka pakan (A) detik
14 Seleksi kondisi apakah akan setting pergerakan pakan 15 Jika ya setting berapa kali kotak pakan bergerak dari
Start
A = Berapa detik katup pakan terbuka B = Berapa kali kotak pakan bergerak *Keterangan :
i = penambahan +1 setiap kembali ke posisi awal Alarm On
29
Di bawah ini adalah table 3.4 keterangan dari diagram alir pemberian pakan bebek otomatis.
Tabel 3.4 Keterangan diagram alir pemberian pakan bebek otomatis.
No Keterangan
1 Memulai program
2 Inisialisasi variable i, A, B
3 Seleksi kondisi apakah jam sekarang sama dengan jam jadwal pagi 4 Seleksi kondisi apakah jam sekarang sama dengan jam jadwal sore 5 Seleksi kondisi apakah jam sekarang sama dengan jam jadwal
malam
6 Seleksi kondisi apakah pakan tersedia 7 Jika tidak alarm on dan buzzer berbunyi
8 Jika ya motor power window 1 on dan membuka katup drum penampungan pakan
9 Katup membuka selama (A) detik 10 Katup Tertutup
11 Motor power window 1 off
12 Motor power window 2 on dan menggerakan roda 13 Seleksi kondisi apakah i lebih kecil dari B
14 Jika ya kotak bergerak ke kiri
15 Kotak menyentuh limit switch yang berada di sebelah kanan 16 Kotakbergerak ke kanan
17 Kotak menyentuh limit switch dan i ditambahkan dengan 1 18 Motor power window 2 off
Start
Gambar 3.11 Diagram Alir Pemberian air minum
Di bawah ini adalah table 3.5 keterangan dari diagram alir pemberian minum untuk bebek.
Tabel 3.5 Keterangan diagram alir pemberian minum
No Keterangan
1 Memulai program 2 Inisialisasi
3 Seleksi kondisi apakah air ditempat minum habis 4 Jika ya pompa air mini on dan menyedot air 5 Seleksi kondisi apakah air sudah penuh
31
BAB IV
PENGUJIAN DAN ANALISA
Pada bab ini akan dibahas tentang beberapa pengujian yang telah dilakukan, dan berkaitan dengan beberapa bagian yang mendukung dalam merealisasikan proyek akhir ini , beberapa pengujiannya adalah :
1. Pengujian Catu Daya. 2. Pengujian RTC DS1307. 3. Pengujian Buzzer. 4. Pengujian Driver Motor.
5. Pengujian Motor Power Window.
6. Pengujian Pelampung dan Pompa Air Mini 7. Pengujian Komponen Keseluruhan.
4.1 Pengujian Catu Daya
Dalam pengujian catu daya pengujian yang dilakukan yaitu mengukur tegangan pada rangkaian catu daya dari keluaran adaptor 12V 8A.
Tabel 4.1 Pengujian Catu Daya
NO IC Tegangan input Tegangan Output
1 IC Regulator 7805 12,1V 4,75V
4.2 Pengujian RTC DS1307
32
perangkat PC sebagai media untuk memasukan program ke dalam Atmega8535 yang berfungsi sebagai kontroler serta LCD karakter 16x2 sebagai visualisasi dari sistem alat ini.
Pada saat pengujian terlihat bahwa RTC DS1307 bisa bekerja dengan baik yaitu bisa menampilkan jam dan tanggal sesuai dengan program yang sudah dimasukan sebelumnya. Bisa dilihat pada Gambar 4.1 di bawah ini.
Gambar 4.1 Tampilan Jam dan Tanggal pada LCD
Data berikut ini untuk melihat bahwa RTC memiliki battery cadangan saat
supply dari mikro terputus, terlihat pada Gambar 4.2 Walaupun supply dari mikro terputus RTC terus berjalan dikarenakan pada rangkaian RTC DS 1307 memiliki
battery cadangan 3V.
(a) (b)
Gambar 4.2 Tampilan Jam dan Tanggal sebelum dan setelah dimatikan (a) Jam sebelum dimatikan, (b) Jam setelah dinyalakan kembali.
Dari pengujian ini dapat disimpulkan bahwa sistem pewaktuan bisa digunakan karena bisa berfungsi dengan baik, selain itu dengan adanya battery
4.3 Pengujian Buzzer
Pengujian buzzer dilakukan untuk mengetahui apakah limit switch yang berfungsi sebagai sensor penanda pakan tersedia atau habis berfungsi dengan baik atau tidak. Dimana sensor tersebut disimpan di dalam sebuah galon yang jika galon itu terisi penuh, maka proses pemberian pakan akan terus berjalan, sedangkan jika galon kosong atau tidak terisi maka buzzer akan berbunyi.
(a)
(b)
Gambar 4.3 Kondisi pakan dengan limit switch (a) Limit switch tertekan (b) Limit Switch tidak tertekan
4.4 Pengujian Driver Motor
Pengujian driver motor ini bertujuan untuk mengetahui bahwa driver motor bisa digunakan sebagaimana mestinya dalam hal ini menggerakan motor power window yang berfungsi sebagai pembuka katup dan roda penggerak.
34
Gambar 4.4 Motor power window 1 pembuka katup pakan
Tabel 4.2 Logika Motor power window 1
Enable A Input 1 Input 2 Kondisi Motor 1
0 X X Berhenti
1 0 1 Buka Katup
1 1 0 Tutup Katup
Gambar 4.5 Motor Power Window 2 penggerak kotak pakan
Tabel 4.3 Logika Motor power window 2
Enable B Input 3 Input 4 Kondisi Motor 2
0 X X Berhenti
1 0 1 Roda Maju
1 1 0 Roda Mundur
sebelumnya ke dalam Atmega8535. Dari data di atas maka dapat dianalisakan bahwa motor akan membuka katup atau menutup katup dan bergerak maju atau mundur apabila pin enable pada driver berlogika 1 dan sebaliknya jika motor berlogika 0 maka motor akan berhenti.
4.5 Pengujian Motor Power Window
Motor power window adalah salah satu komponen penting pada rancang bangun pemberian pakan bebek otomatis ini, selain motor power window
berfungsi sebagai katup pembuka motor power window juga berfungsi sebagai roda penggerak pakan. Dalam pengujian ini motor power window yang dipasang pada roda diuji ketahanannya dengan membawa beban diatasnya seberat 3kg.
Gambar 4.6 Kotak pakan diberi beban sekitar 3kg
Setelah diuji maka dapat disimpulkan bahwa motor power window bisa membawa beban lebih dari 2kg, tetapi ada sedikit masalah pada driver motor jika beban yang dibawa lebih berat motor akan cepat panas karena arus dari driver
motor hanya 2A, sedangkan power window membutuhkan arus yang lebih besar.
4.6 Pengujian Pelampung dan Pompa Air Mini
36
Tabel 4.4 Pengujian Pelampung dan Pompa air mini
Ketinggian Air Pompa
2 cm ON
4 cm OFF
4.7 Pengujian Komponen Keseluruhan
Proses pemberian pakan bisa berjalan sesuai dengan yang di inginkan, bisa dilihat pada tabel di bawah ini.
Tabel 4.5 Pengujian Komponen Keseluruhan
No Komponen Fungsi Status
1 Limit Switch Sensor penanda pakan tersedia/habis. Berjalan dengan baik
2 Power Window 1 Pembuka katup pakan. Berjalan dengan baik
3 Limit Switch 1 Switch untuk memerintah kotak pakan bergerak ke kiiri.
Berjalan dengan pakan bergerak ke kanan.
37
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Kesimpulan yang didapat dari hasil penelitian adalah sebagai berikut:
1. Rancang bangun pemberian pakan dan minum bebek sudah mampu berjalan sesuai dengan yang diinginkan yaitu pemberian pakan secara terjadwal.
2. Rancang bangun pemberian pakan dan minum bebek ini mampu diimplementasikan ke tempat yang sesungguhnya.
5.2 Saran
Saran dari Penulis untuk pengembangan rancang bangun Pemberian Pakan
Bebek dan Minum Otomatis yang telah dibuat diantaranya:
1. Volume pakan yang keluar sebaiknya diatur dengan timbangan bukan dengan waktu.
2. Penambahan sensor pada kotak penyaluran pakan agar pada saat pakan habis, maka kotak pakan akan kembali ke tempat semula tanpa harus menyentuh limit switch.
RIWAYAT PENULIS
Nama Lengkap : Gilang Febirianto
Tempat, tanggal lahir : Bandung, 27 Februari 1992 Jenis Kelamin : Laki-laki
Agama : Islam
Alamat : Kp. Cirateun Peuntas RT 02 RW 13 Ds. Wangunsari Kec. Lembang Kab. Bandung Barat
No. Telpon : 085721118218
Email : [email protected]
Pendidikan
Sekola/Universitas Periode
Program Studi Teknik Komputer,
Jurusan Teknik Komputer, 2010-2014 Fakultas Teknik dan Ilmu Komputer,
Universitas Komputer Indonesia
SMK Negeri 4 Bandung (RPL) 2006-2010
SMP Negeri 3 Lembang 2003-2006
SD Negeri Setiabudi 1997-2003
Pengalaman Kerja Praktek
2009 : PT. TASPEN (Persero) Selama 4 Bulan
![Gambar 2.1 Konfigurasi Pin ATmega8535 [1]](https://thumb-ap.123doks.com/thumbv2/123dok/692767.85724/15.595.235.390.338.514/gambar-konfigurasi-pin-atmega.webp)
![Gambar 2.2 Blok diagram fungsional ATmega8535 [1]](https://thumb-ap.123doks.com/thumbv2/123dok/692767.85724/16.595.219.410.82.316/gambar-blok-diagram-fungsional-atmega.webp)
![Gambar 2.3 Konfigurasi Pin DS1307[4]](https://thumb-ap.123doks.com/thumbv2/123dok/692767.85724/18.595.173.456.416.611/gambar-konfigurasi-pin-ds.webp)
![Gambar 2.5 (a) Bentuk fisik (b) DS1307 Circuit [9]](https://thumb-ap.123doks.com/thumbv2/123dok/692767.85724/19.595.192.499.516.638/gambar-a-bentuk-fisik-b-ds-circuit.webp)
![Gambar 2.6 IC driver motor L298N [2]](https://thumb-ap.123doks.com/thumbv2/123dok/692767.85724/20.595.200.420.194.329/gambar-ic-driver-motor-l-n.webp)
![Gambar 2.8 LCD 16x2 [6]](https://thumb-ap.123doks.com/thumbv2/123dok/692767.85724/22.595.215.412.471.599/gambar-lcd-x.webp)
![Gambar 2.9 Buzzer (a) bentuk fisik dan (b) alokasi pin [6]](https://thumb-ap.123doks.com/thumbv2/123dok/692767.85724/23.595.230.434.213.309/gambar-buzzer-a-bentuk-fisik-dan-alokasi-pin.webp)