MENGENAL ROBOT LENGAN – ROBOT SERVO
(MODUL 1 DAN 2)
Oleh :
Muhammad Rodli Fasya Maret 2017
A. Sistem Kendali Robot Lengan
1. Sistem kendali
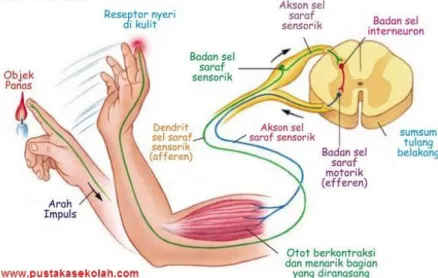
Alat indera mengirimkan informasi kepada otak sebagai pengolah informasi untuk memberikan perintah kepada sistem motorik/aktuator. Sebagai contoh sistem deteksi panas sebagaimana Gambar 1.1. Apabila tangan mendeteksi adanya api, maka kulit yang bertindak sebagai sensor peraba akan mengirimkan rasa panas kepada otak, sehingga otak mengolah informasi dan memberikan perintah kepada tangan untuk menarik atau menjauhi api.
Gambar 1.1 Sistem kendali tubuh manusia (www.pustakasekolah.com)
Secara umum komponen dasar sistem kendali terdiri dari sensor, pengolah data, dan aktuator. Menurut Kamus Besar Bahasa Indonesia (KBBI), definisi dari istilah tersebut adalah sebagai berikut:
Sistem adalah perangkat unsur yang teratur saling berkaitan sehingga membentuk suatu totalitas.
Kendali adalah pengawasan; pemeriksaan; kontrol.
Sistem Kendali dapat didefinisikan sebagai suatu proses pengendalian yang melibatkan unsur tertentu (variabel atau besaran fisis) yang saling berkaitan sehingga membentuk suatu nilai yang diinginkan. Pada Gambar 1.2 yang merepresentasikan Sistem Kendali dalam bentuk diagram blok.
Gambar 1.2 diagram blok sisdal
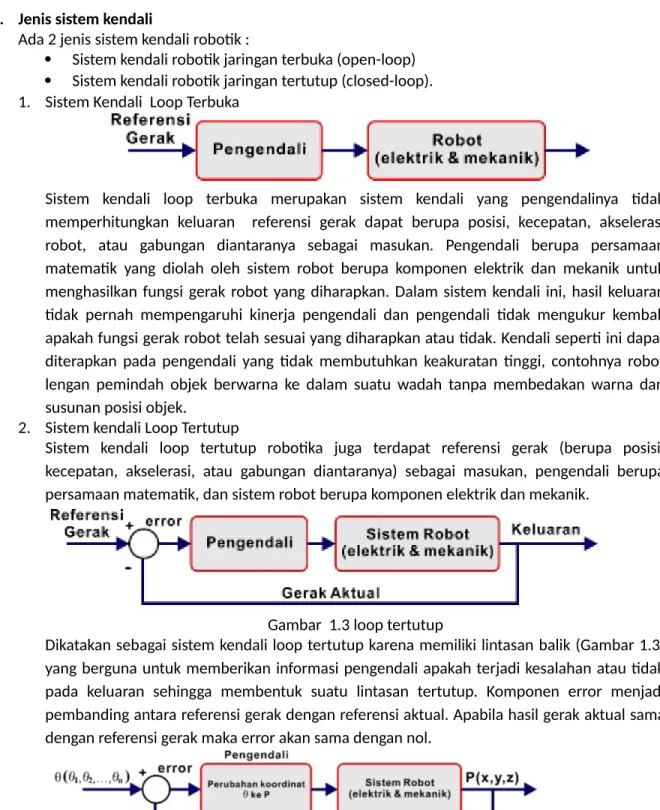
2. Jenis sistem kendali
Ada 2 jenis sistem kendali robotik :
Sistem kendali robotik jaringan terbuka (open-loop) Sistem kendali robotik jaringan tertutup (closed-loop). 1. Sistem Kendali Loop Terbuka
Sistem kendali loop terbuka merupakan sistem kendali yang pengendalinya tidak memperhitungkan keluaran referensi gerak dapat berupa posisi, kecepatan, akselerasi robot, atau gabungan diantaranya sebagai masukan. Pengendali berupa persamaan matematik yang diolah oleh sistem robot berupa komponen elektrik dan mekanik untuk menghasilkan fungsi gerak robot yang diharapkan. Dalam sistem kendali ini, hasil keluaran tidak pernah mempengaruhi kinerja pengendali dan pengendali tidak mengukur kembali apakah fungsi gerak robot telah sesuai yang diharapkan atau tidak. Kendali seperti ini dapat diterapkan pada pengendali yang tidak membutuhkan keakuratan tinggi, contohnya robot lengan pemindah objek berwarna ke dalam suatu wadah tanpa membedakan warna dan susunan posisi objek.
2. Sistem kendali Loop Tertutup
Sistem kendali loop tertutup robotika juga terdapat referensi gerak (berupa posisi, kecepatan, akselerasi, atau gabungan diantaranya) sebagai masukan, pengendali berupa persamaan matematik, dan sistem robot berupa komponen elektrik dan mekanik.
Gambar 1.3 loop tertutup
Dikatakan sebagai sistem kendali loop tertutup karena memiliki lintasan balik (Gambar 1.3) yang berguna untuk memberikan informasi pengendali apakah terjadi kesalahan atau tidak pada keluaran sehingga membentuk suatu lintasan tertutup. Komponen error menjadi pembanding antara referensi gerak dengan referensi aktual. Apabila hasil gerak aktual sama dengan referensi gerak maka error akan sama dengan nol.
Gambar 1.4 menggambarkan sistem kendali pergerakan robot lengan. Jika input merupakan
setiap sendi dalam pemetaan ruang kerja, sedangkan seorang programmer memerlukan posisi ujung lengan yang dinyatakan dalam koordinat kartesian (2 dimensi/3 dimensi). Dengan demikian, diperlukan perubahan koordinat antara ruang sudut (0) dengan ruang kartesian (P). Kombinasi antara perubahan koordinat 0 ke P pada pengendali disebut sebagai pengendali kinematik (kinematic controller).
3. Kinematic robot lengan 1 sendi
Robot lengan satu sendi (Single Link Arm) menjadi langkah awal untuk mempelajari struktur robot yang lebih kompleks seperti robot manipulator lengan banyak ataupun humanoid. Gambar 1.5 dan 1.6 menunjukkan robot lengan satu sendi yang menggunakan motor servo sebagai aktuatornya.
Dikatakan robot lengan satu sendi karena robot ini mempunyai 1 sendi dan 1 lengan atau disebut juga dengan 1 Degree Of Freedom (DOF). Apabila robot dikenai perintah untuk menggerakkan lengan, maka lengan robot akan bergerak pada koordinat x dan y. Koordinat x,y, dan z menyatakan sebagai arah transformasi dari tiap-tiap komponen ruang sendi. Koordinat z tidak dapat ditampilkan pada gambar 2 dimensi karena tegak lurus dengan arah pandang kita. Pada Gambar 1.7, kedudukan ujung lengan disimbolkan dengan P yang berada pada titik (x dan y) sedangkan jari-jari (r) ditulis sebagai panjang lengan atau link (l) dan θ adalah sudut sendi.
Jika titik (x,y) diketahui maka ? dapat dihitung dengan cara,
Sebagai contoh, panjang lengan robot (l) pada Gambar 1.7 adalah 12 cm, sehingga titik terjauh robot lengan berada pada titik P (12,12). Karena yang diketahui adalah titik x dan y maka untuk mencari sudut ? dapat dihitung menggunakan persamaan 1.3.
Jadi, besar sudut lengan robot yang berada pada titik P (12,12) adalah 45˚.
A. Mekanika Robor Lengan
1. Konfigutasi geometri Articulated robot
Gambar ini menjelaskan pola pergerakan Articulated robot atau bisa juga disebut dengan antrhomorpic arm. Struktur mekanik pola pergerakan ini setidaknya memiliki 3 sendi putar yang membentuk sistem koordinat polar.
Contoh sederhana articulated robot ditunjukkan oleh Gambar 2.2(a) yang memiliki 2 DOF. Robot terdiri dari 2 joint dan 2 link yang saling terhubung, link 1 adalah elbow, dan link 2 adalah wrist. Arah pergerakan robot yang ditunjukkan Gambar 2.2(b) bergerak pada koordinat X dan Y.
Gambar 2.4(a) menunjukkan gambar articulated robot yang memiliki 3 DOF. Robot terdiri dari 3 joint dan 3 link yang saling terhubung, link 1 adalah shoulder, link 2 adalah elbow, dan link 3 adalah wrist. Arah pergerakan robot yang ditunjukkan Gambar 2.4(b) bergerak pada koordinat X dan Y.
Gambar 2.6(a) menunjukkan gambar articulated robot yang memiliki 3 DOF (x, y, z). Robot terdiri dari 3 joint dan 3 link yang saling terhubung, link 1 adalah shoulder, link 2 adalah elbow, dan link 3 adalah wrist. Arah pergerakan robot yang ditunjukkan Gambar 2.6(b) joint 1 bergerak pada koordinat X dan Z, sedangkan joint 2 dan 3 bergerak pada koordinat X dan Y, sehingga robot ini dapat bergerak naik-turun dan kanan-kiri masing- masing sejauh ±180˚.
Desain robot lengan yang disusun dalam modul ini memiliki 5 DOF, bergerak pada koordinat x, y, dan z dengan susunan:
J1 : base rotation (dudukan untuk berputar horisontal) J2 : shoulder (lengan atas/pundak untuk berputar vertikal) J3 : elbow (lengan bawah untuk berputar vertikal)
J4 : wrist (pergelangan angguk untuk berputar vertikal) J5 : griper (jari tangan untuk menjapit obyek)
Susunan joint dan link lengan robot 5 DOF yang didesain dalam modul ini dalam bentuk free body diagram ditunjukkan oleh Gambar 2.8.
2. Analisis kinematic robot lengan
Pergerakan robot dikenal juga dengan istilah kinematik. Menurut Pitowarno, dalam buku “Robotika: Disain, Kontrol, dan Kecerdasan Buatan” disebutkan bahwa: kinematic dalam robotik adalah suatu bentuk pernyataan deskripsi matematik geometri dari suatu struktur robot yang diperoleh melalui hubungan antara konsep geometri ruang sendi pada robot dengan konsep koordinat cartesian untuk menentukan kedudukan dari suatu obyek.
Kinematik pada robot secara umum terbagi menjadi dua, yaitu kinematik maju (forward) dan kinematik kebalikan (invers), seperti Gambar 2.10.
Mengacu pada Gambar 2.10 :
Kinematik maju adalah analisis kinematik agar mendapatkan posisi titik koordinat kartesian P(x,y,z) jika yang diketahui besar sudut tiap sendi (θ),
Kinematik balikan (invers) adalah analisis kinematik agar mendapatkan besar sudut angular tiap sendi (θ) jika yang diketahui titik koordinat P(x,y,z).
Salah satu cara paling mudah untuk menyelesaikan analisis kinematik robot adalah dengan menggunakan persamaan geometri yang memanfaatkan pola segitiga pada setiap link lengan robot yang terbentuk.
Pada Gambar 2.11 menunjukkan konfigurasi robot lengan 2 sendi yang digambar menggunakan warna biru muda dan dilambangkan dengan huruf l. Apabila variabel yang diketahui adalah besar sudut (θ), maka untuk mendapatkan kedudukan ujung lengan yang dinyatakan sebagai P= (x,y) adalah dengan menggunakan analisis kinematik maju.
Gambar 2.12 menunjukkan cara mudah untuk menganalisa kinematik robot lengan 2 DOF adalah dengan mencari persamaan kinematic maju pada lengan pertama terlebih dahulu. Sehingga ditemukan persamaan proyeksi link 1 (l1 ) terhadap sumbu x dan y yang ditunjukkan oleh persamaan 2.1 dan 2.2.
Berdasarkan uraian diatas, persamaan kinematik maju untuk 2 lengan (2 DOF) dianalisis sebagai berikut:
sehingga diperoleh posisi x dan y sebagaimana Persamaan 2.5 dan 2.6:
memanfaatkan hukum identitas trigonometri maka:
Jadi persamaan kinematic maju robot 2 lengan :
Perhatikan kembali Gambar 2.13, sudut θ1 dapat dicari melalui:
sedangkan
Dengan memanfaatkan hukum identitas trigonometri tan(a+-b),
Jadi persamaan kinematic invers robot 2 lengan :
Gambar 2.14,menunjukkan robot lengan 3 sendi ini menggunakan koordinat x dan y dalam area kerjanya. Sama seperti robot lengan 2 sendi, robot lengan 3 sendi menggunakan kinematik maju sebagai analisis persamaannya.
Sudut adalah sudut arah hadap lengan ketiga terhadap sumbu X, sebagaimana persamaan 2.12.
dengan menggunakan Gambar 2.16, persamaan proyeksi link 2 (l2 ) terhadap sumbu x dan y dapat dianalisis menggunakan Persamaan 2.15 dan 2.16.
dan menganalisis persamaan persamaan proyeksi link 3 (l3 ) terhadap sumbu x dan y menggunakan Gambar 2.17 sehingga ditemukan Persamaan 2.17 dan 2.18.
Sehingga
disederhanakan menggunakan rumus hukum identitas trigonometri:
Atau
Rumus persamaan kinematic maju robot 3 sendi
Untuk kinematik invers, jika koordinat P(XT, YT ) dan P(x,y) diketahui maka sudut 01 dan 02 dapat
dicari mengguanakan persamaan yang sama pada robot lengan dua sendi:
Sudut dapat dicari dengan menggunakan P(XT,YT ) dan P(x,y) yang dimasukkan ke dalam Persamaan (2.23) dan (2.24), sehingga 03 dapat ditemukan.