Fakultas Ilmu Komputer
Universitas Brawijaya
2810
Implementasi Robot Lengan Pemindah Barang 3 DOF Menggunakan
Metode Inverse Kinematics
Rimas Oktama 1, Rizal Maulana 2, Gembong Edhi Setyawan 3
Program Studi Teknik Informatika, Fakultas Ilmu Komputer, Universitas Brawijaya Email: 1[email protected], 2[email protected], 3[email protected]
Abstrak
Proses perpindahan barang dari satu tempat ke tempat yang lain biasanya dilakukan dengan cara konvensional menggunakan tenaga manusia, maka dapat dipastikan semakin berat benda dan semakin jauh jarak perpindahan benda tenaga manusia yang dibutuhkan juga semakin besar. Hal ini dinilai kurang efektif mengingat keterbatasan kemampuan manusia dalam memindahkan barang berat dan keterbatasan waktu manusia dalam bekerja. Berdasarkan permasalahan tersebut diperlukan sebuah robot lengan yang mampu melakukan proses perpindahan barang dari satu tempat ke tempat lain. Robot lengan ini didesain memiliki 3 DOF(Degree of Freedom) dengan seluruh joint adalah revolute dengan menggunakan servo dynamixel AX-12A. Input dari robot ini berupa koordinat awal dan koordinat akhir yang kemudian dikomputasikan dengan metode inverse kinematics dengan output berupa besar sudut yang dibutuhkan masing-masing joint agar robot lengan mencapai titik koordinat tersebut. Hasil dari penelitian yang telah dilakukan, robot mampu memindahkan barang dari satu titik koordinat ke titik koordinat yang lain dalam kurun waktu rata-rata 6 sampai 7 detik serta tingkat error yang terjadi dalam pencapaian sudut yang diinginkan sebesar 0,64%. Berdasarkan hasil tersebut dinilai sistem implementasi robot lengan pemindah barang 3DOF dengan menggunakan metode inverse kinematics ini sangat efektif dalam menjalankan fungsinya memindahkan barang.
Kata kunci: robot lengan, inverse kinematics, servo dynamixel AX-12A
Abstract
Moving object process from one place to another is usually done with the conventional way using human power, then it can certainly getting heavy objects and the farther the distance of displacement, manpower required objects are also getting bigger. It is judged ineffective considering the limitations of human capability in the shift of weight and time limitations of humans in the work. Based on these problems required a robot arm that is able to moving an object from one place to another. The robot arm was designed to have 3 DOF (Degree of Freedom) and the whole joint is revolute and implemented using servo dynamixel AX-12A. Input from this robot is initial coordinates and final coordinates are then computing by the method of inverse kinematics with an output in the form of large angle of each joint required in order for the robot arm reaches the point coordinates. Results from research that has been done, the robot is able to move the object from one point coordinate to another within an average period of 6 to 7 seconds as well as the level error that occurred in the achievement of the desired angle of 0.64%. Based on the results of the implementation system of the arm robot assessed transporter 3DOF using inverse kinematics method is very effective in carrying out its functions to move an object.
Keywords: arm robot, inverse kinematics, servo dynamixel AX-12A
1. PENDAHULUAN
Robot adalah sesuatu yang dapat diprogram ulang, memiliki penggerak atau manipulator dan didesain untuk memindahkan barang, alat atau komponen khusus guna menyelesaikan suatu tugas (engineering.nyu
from Robot Institute of America, 1997). Terdapat berbagai jenis dan bentuk dari teknologi robotika, salah satunya adalah robot berbentuk lengan. Robot lengan merupakan jenis robot manipulator yang berbentuk seperti lengan manusia dengan memiliki sendi atau disebut dengan joint dan link yang merupakan
penghubung antar joint.
Terdapat dua jenis joint (sendi) pada robot lengan yaitu joint revolute dan joint prismatic, joint revolute memiliki pergerakan memutar sedangkan joint prismatic memiliki pergerakan maju atau mundur. Joint revolute pada robot lengan disusun dari motor servo, ketepatan gerak motor servo inilah yang menjadi indikator utama dari keberhasilan gerak robot lengan. Terdapat berbagai macam metode yang dapat digunakan untuk melakukan pergerakan secara tepat pada robot lengan, salah satunya adalah metode inverse kinematics.
Metode inverse kinematics merupakan metode pergerakan robot lengan dengan variabel yang diketahui adalah titik koordinat tujuan, sehingga dibutuhkan perubahan besar sudut pada masing-masing joint robot lengan agar robot lengan mampu mencapai titik tersebut (Eko, 2014). Penggunaan metode inverse kinematics ini akan memudahkan proses komputasi agar ujung dari robot lengan mampu mencapai titik yang diinginkan dengan mengetahui perubahan sudut dari masing-masing joint-nya.
Perkembangan teknologi robot saat ini diperlukan dalam berbagai bidang kehidupan. Penggunaan teknologi robotika ini bertujuan agar mempermudah kegiatan sehari-hari. Salah satu kegiatan yang dapat dilakukan oleh robot lengan yaitu adalah proses pemindahan barang dari satu tempat ke tempat yang lain. Pada pemindahan barang yang dilakukan manusia mempertimbangkan beberapa faktor yaitu beratnya barang, jumlah barang, jarak perpindahan dan tenaga manusia yang dibutuhkan (Fajar, 2013). Semakin berat dan semakin banyak barang, atau semakin jauh jarak perpindahan yang akan dilakukan maka tenaga manusia yang dibutuhkan untuk melakukan perpindahan barang akan semakin besar. Selain itu ketidakmungkinan tenaga manusia bekerja selama 24 jam juga merupakan faktor yang memengaruhi tingkat efektifitas serta kualitas kegiatan tersebut (Saefullah, 2014).
Berdasarkan permasalahan tersebut diperlukan sebuah robot lengan yang mampu melakukan proses perpindahan barang dari satu tempat ke tempat lain sehingga diharapkan mampu mempermudah kegiatan pemindahan barang yang dilakukan serta meningkatkan tingkat efektifitas baik dalam hal waktu, tenaga maupun kualitas dari suatu kegiatan (Gita, 2014). Robot ini akan bertugas melakukan
proses perpindahan barang dari satu titik koordinat ke titik koordinat yang lain. Input dari robot ini berupa titik koordinat yang kemudian dikomputasikan dengan metode inverse kinematics dengan output berupa besar sudut yang dibutuhkan masing masing joint agar robot lengan mencapai titik koordinat tersebut.
2. PERANCANGAN DAN IMPLEMENTASI
Perancangan pada gambar 1 terbagi menjadi 2 yaitu perancangan perangkat keras dan perancangan metode inverse kinematics. Pada perancangan perangkat keras dibagi menjadi 2 yaitu perancangan desain link dan joint robot, perancangan rangkaian hardware pada robot. Perancangan Robot Lengan Perancangan Perangkat Keras Perancangan Metode Inverse Kinematics Perancangan Desain
Link dan Joint robot
Perancangan Rangkaian Hardware pada robot
Gambar 1. Perancangan Robot Lengan
2.1 Perancangan Desain Link dan Joint Robot
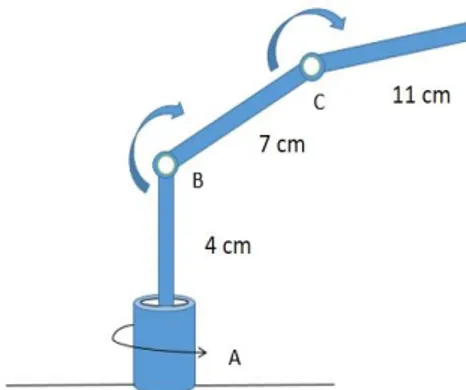
Desain link dan joint robot lengan pada penelitian ini terdapat pada gambar 2. Pada bagian yang dituliskan dengan huruf A, B dan C merupakan joint robot lengan. Link adalah bagian yang menghubungkan joint. Terdapat 3 link pada robot lengan yaitu link antara joint A dan B, link antara joint B dan C dan link antara joint C dan end effector yang masing-masing memiliki panjang 4cm, 7cm dan 11cm.
2.2 Perancangan Rangkaian Hardware pada Robot
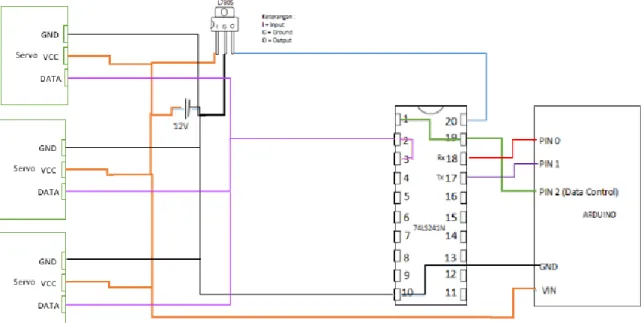
Perancangan rangkaian hardware pada robot lengan dapat dilihat pada gambar 3 yang terdiri dari 3 servo Dynamixel AX-12A, 1 IC regulator L805, IC buffer 74LS241N dan Arduino Uno.
Pada gambar 3 dapat dilihat Arduino Uno sebagai pengontrol utama, IC regulator sebagai penurun tegangan yang outputnya akan digunakan oleh IC buffer untuk sumber tegangan.
Penghubungan pin secara rinci akan dijelaskan pada Tabel 1, Tabel 2 dan Tabel 3.
Tabel 1. Konfigurasi pin Arduino Uno dan IC 74LS241N
Arduino Uno IC 74LS241N
Pin 0 (Rx) Pin 18
Pin 1 (Tx) Pin 17
Pin 2 Pin 1, Pin 19
GND Pin 10
Pada Tabel 1 adalah penyambungan antara pin pada Arduino dan kaki IC 74LS241N. Dapat dilihat Pin 0 (Rx) dan Pin 1 (Tx) pada Arduino disambungkan ke Pin 18 dan Pin 17 pada kaki IC. Kemudian Pin 2 sebagai Data kontrol pada Arduino disambungkan ke Pin 1 dan Pin 19 pada kaki IC. Dan yang terakhir adalah GND pada Arduino disambungkan ke Pin 10 pada kaki IC.
Tabel 2. Konfigurasi IC 74LS241N dan Regulator L7805
IC 74LS241N Regulator L7085
Pin 20 Output
Pin 10 GND
Pada Tabel 2 adalah penyambungan antara kaki IC 74LS241N dan kaki Regulator L7805. Dapat dilihat yang disambungkan pada Pin 20 dan Pin 10 kaki IC adalah output dan GND dari regulator sebagai sumber daya yang dibutuhkan sebesar 5v.
Tabel 3. Konfigurasi IC 74LS241N dan Servo Dynamixel AX-12A
IC 74LS241N Dynamixel AX-12A
Pin 10 GND
Pin 2, Pin 3 Data
Pada Tabel 3 adalah penyambungan antara kaki IC 74LS241N dan Servo Dynamixel AX-12. Dapat dilihat pin yang disambungkan adalah Pin 10 kaki IC ke Pin GND servo serta Pin 2 dan Pin 3 kaki IC ke Pin Data pada servo sebagai buffer.
2.3 Perancangan Metode Inverse Kinematics 3 DOF (Degree Of Freedom)
Pada perancangan metode inverse kinematics didapatkan rumus dari perancangan link dan joint robot. Perhitungan rumus
bertujuan untuk mendapatkan nilai 𝜃1, 𝜃2, 𝜃3. Sebelum mencari ketiga nilai 𝜃 diasumsikan telah memiliki nilai dari koordinat (x, y, z) dan panjang link (L1, L2, L3).
Rumus untuk mencari nilai 𝜃1 dapat dilihat pada persamaan (1).
𝜃1= 𝑎𝑡𝑎𝑛2 (𝑦, 𝑥) (1)
Keterangan. x = nilai koordinat x y = nilai koordinat y
Pada persamaan (1) dengan input nilai koordinat x dan y maka akan didapatkan nilai dari 𝜃1.
Setelah mencari nilai 𝜃1 maka selanjutnya untuk mencari 𝜃2 dan 𝜃3 memerlukan nilai c3 dan s3. Nilai c3 dan s3 merupakan variabel bantu untuk menyelesaikan rumus 𝜃2 dan 𝜃3. Rumus untuk mencari nilai c3 dan s3 dapat dilihat pada persamaan (2) dan persamaan (3).
𝑐3 = (𝑥2+𝑦2+(𝑧−𝐿1)2−𝐿22−𝐿32)
(2× 𝐿2× 𝐿3) (2)
𝑠3 = √1 − 𝑐32 (3)
Keterangan.
x = nilai koordinat x L1 = panjang link pertama y = nilai koordinat y L2 = panjang link kedua z = nilai koordinat z L3 = panjang link ketiga
Kemudian selanjutnya adalah mencari nilai 𝜃3 dengan rumus pada persamaan (4).
𝜃3= 𝑎𝑡𝑎𝑛2 (𝑠3, 𝑐3) (4)
Pada persamaan (4) dengan memasukan nilai dari variable s3 dan c3 maka akan didapatkan nilai 𝜃3.
Setelah menemukan nilai 𝜃3 selanjutnya mencari nilai dari 𝜃2 dengan rumus pada persamaan (5).
𝜃2= 𝑎𝑡𝑎𝑛2 ((𝐿3 𝑥 𝑠3), (𝐿2 + (𝐿3 𝑥 𝑐3))) (5) Keterangan.
L2 = panjang link kedua L3 = panjang link ketiga
Pada persamaan (5) dengan memasukan nilai L2, L3, c3 dan s3 maka akan didapatkan nilai 𝜃2.
2.4 Implementasi Robot Lengan
Pada implementasi robot lengan akan ditampilkan bentuk dari robot lengan yang merupakan hasil dari proses perancangan. Sesuai dengan proses perancangannya
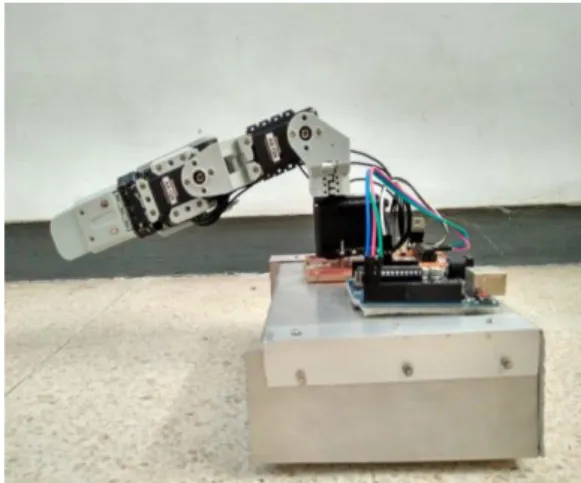
implementasi hardware yang digunakan adalah Arduino Uno sebagai pengolah utama dan servo Dynamixel AX-12 sebagai penggeraknya. Pada gambar 4, gambar 5 dan gambar 6 adalah implementasi robot lengan yang telah dilakukan.
Gambar 4. Hasil implementasi robot lengan tampak atas
Gambar 5. Hasil implementasi robot lengan tampak samping
Gambar 6. Hasil implementasi robot lengan tampak belakang
3. PENGUJIAN
Pada penelitian ini dilakukan 3 pengujian yaitu waktu yang dibutuhkan oleh robot untuk mencapai titik koordinat yang telah ditentukan, ketepatan putaran sudut servo yang dihasilkan
dari perhitungan rumus yang dilakukan oleh sistem dan ketepatan sudut yang mampu dicapai oleh robot melalu perbandingan metode inverse kinematics dan metode forward kinematics.
3.1. Pengujian Waktu Pencapaian Titik Koordinat
Pengujian waktu pencapaian koordinat ini bertujuan untuk mengetahui kecepatan gerak robot dalam mencapai titik koordinat yang telah ditentukan. Proses pengukuran waktu akan dilakukan dengan menggunakan stopwatch sebagai alat pengukur waktu dengan mengambil 5 jenis motion yang berbeda. Titik koordinat awal dibuat sama sebagai acuan letak pengambilan barang. Pada tiap motion akan dilakukan percobaan sebanyak 10 kali yang nantinya dirata-rata untuk mengetahui waktu yang dibutuhkan pada setiap motion. Hasil dari pengujian waktu pencapaian titik koordinat dapat dilihat pada Tabel 4.
Tabel 4. Hasil Pengujian Waktu Pencapaian Titik Koordinat
Motion Koordinat Rata-rata
Waktu(s) 1 (7, 7, 11) ke (1, 0, -13) 6,6843 2 (7, 7, 11) ke (0, 3, -13) 7,1157 3 (7, 7, 11) ke (2, 3.46, -13) 6,7397 4 (7, 7, 11) ke (1, -0.58, -13) 6,9762 5 (7, 7, 11) ke (5, -5, -12) 7,0387 Hasil dari pengujian menunjukkan kelima motion mendapatkan waktu rata-rata yang hampir sama sekitar 6 sampai 7 detik walaupun dengan jarak yang berbeda. Dari hal ini dapat diketahui bahwa rata rata waktu robot memindahkan barang sekitar 6 sampai 7 detik. 3.2. Pengujian Ketepatan Sudut Putar Servo
Pengujian ketepatan sudut putar motor servo bertujuan untuk mengetahui akurasi gerak berupa sudut yang dihasilkan motor servo. Proses pengujian ketepatan putaran motor servo ini dilakukan dengan membandingkan hasil dari dua cara pengukuran yaitu pengukuran secara manual menggunakan busur derajat dan pengukura rumus inverse kinematics secara sistem pada arduino uno. Hasil pengujian ketepatan sudut putar pada servo 1 dan servo 2 dapat dilihat pada Tabel 5 dan Tabel 6.
Tabel 5. Hasil Pengujian Ketepatan Sudut Putar Servo 1 Koordinat Sudut Teta1 Sudut yang terukur Selisih Error (%) 0, 1, -4 1, 0.58, -1 90,5 30,13 90 30 0,5 0,13 0,55 0,43 6, 6, 14 -2, 1, 0 1, -1, -1 0, -4, -12 2, 3.46, -13 1, -0.58, -13 1, 4, 0 5, 4, 3 45,02 153,51 195,02 240,05 60 180,13 76 38,58 46 153 194 239 60 180 76 38 0,98 0,51 1,02 1,05 0 0,13 0 0,68 2,18 0,33 0,52 0,44 0 0,07 0 1,76 Tabel 6. Hasil Pengujian Ketepatan Sudut Putar
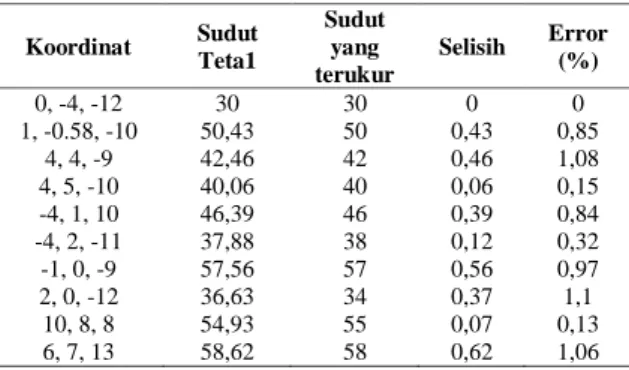
Servo 2 Koordinat Sudut Teta1 Sudut yang terukur Selisih Error (%) 0, -4, -12 1, -0.58, -10 30 50,43 30 50 0 0,43 0 0,85 4, 4, -9 4, 5, -10 -4, 1, 10 -4, 2, -11 -1, 0, -9 2, 0, -12 10, 8, 8 6, 7, 13 42,46 40,06 46,39 37,88 57,56 36,63 54,93 58,62 42 40 46 38 57 34 55 58 0,46 0,06 0,39 0,12 0,56 0,37 0,07 0,62 1,08 0,15 0,84 0,32 0,97 1,1 0,13 1,06
Dari hasil dari kedua tabel dapat ditentukan rata-rata dari persentase error servo 1 dan servo 2 dengan menjumlahkan seluruh data persentase error dibagi banyaknya percobaan sehingga mendapatkan persentase sebesar 0,64%. Perlu diketahui bahwa selisih yang dihasilkan dengan busur derajat terjadi karena akurasi dari busur derajat sebesar 1 derajat.
3.3. Pengujian Ketepatan Sudut Dengan Metode Forward Kinematics
Pengujian ini bertujuan untuk mengetahui ketepatan sudut yang dihasilkan dari kedua perhitungan sehingga dapat mengetahui akurasi rumus perhitungan dan sifat perhitungan inverse kinematics. Proses pengujian ini akan dilakukan dengan membandingkan hasil dari dua perhitungan yaitu perhitungan sistem menggunakan rumus inverse kinematics dan perhitungan manual menggunakan rumus forward kinematics. Pada sistem robot akan dilakukan input koordinat x, y, z yang diinginkan menggunakan metode inverse kinematics sehingga menghasilkan 3 nilai sudut pertama. Ketiga nilai sudut pertama yang dihasilkan kemudian diinput pada rumus forward kinematics sehingga menghasilkan 3 koordinat x, y, z baru . Kemudian hasil 3 koordinat x, y, z baru dimasukan kembali
menggunakan rumus inverse kinematics dan akan didapatkan hasil berupa 3 nilai sudut kedua. Ketiga nilai sudut pertama dan kedua kemudian dibandingkan selisihnya sehingga dapat diketahui akurasi dari rumus inverse kinematics menggunakan rumus forward kinematics. Pengujian dilakukan sebanyak 10 kali sehingga menemukan rata rata dari ketiga selisih 𝜃1, 𝜃2dan 𝜃3. Hasil dari pengujian ketepatan sudut dengan metode forward kinematics dapat dilihat pada Tabel 7.
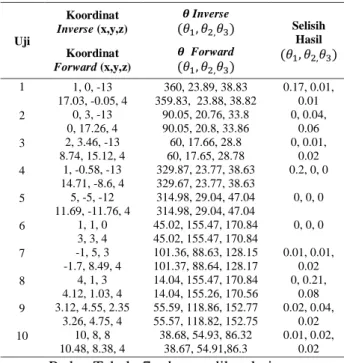
Tabel 7. Hasil Pengujian Ketepatan Sudut dengan Metode Forward Kinematics
Uji Koordinat Inverse (x,y,z) 𝜽 Inverse (𝜃1, 𝜃2,𝜃3) Selisih Hasil (𝜃1, 𝜃2,𝜃3) Koordinat Forward (x,y,z) 𝜽 Forward (𝜃1, 𝜃2,𝜃3) 1 1, 0, -13 17.03, -0.05, 4 0, 3, -13 0, 17.26, 4 2, 3.46, -13 8.74, 15.12, 4 1, -0.58, -13 14.71, -8.6, 4 5, -5, -12 11.69, -11.76, 4 1, 1, 0 3, 3, 4 -1, 5, 3 -1.7, 8.49, 4 4, 1, 3 4.12, 1.03, 4 3.12, 4.55, 2.35 3.26, 4.75, 4 10, 8, 8 10.48, 8.38, 4 360, 23.89, 38.83 359.83, 23.88, 38.82 90.05, 20.76, 33.8 90.05, 20.8, 33.86 60, 17.66, 28.8 60, 17.65, 28.78 329.87, 23.77, 38.63 329.67, 23.77, 38.63 314.98, 29.04, 47.04 314.98, 29.04, 47.04 45.02, 155.47, 170.84 45.02, 155.47, 170.84 101.36, 88.63, 128.15 101.37, 88.64, 128.17 14.04, 155.47, 170.84 14.04, 155.26, 170.56 55.59, 118.86, 152.77 55.57, 118.82, 152.75 38.68, 54.93, 86.32 38.67, 54.91,86.3 0.17, 0.01, 0.01 0, 0.04, 0.06 0, 0.01, 0.02 0.2, 0, 0 0, 0, 0 0, 0, 0 0.01, 0.01, 0.02 0, 0.21, 0.08 0.02, 0.04, 0.02 0.01, 0.02, 0.02 2 3 4 5 6 7 8 9 10
Pada Tabel 7 dapat diketahui rata-rata selisih masing-masing teta dari 10 pengujian yang dilakukan dengan menjumlah data pada masing-masing percobaan dibagi banyaknya percobaan. Melalui cara tersebut didapatkan hasil rata-rata dari ketiga teta yaitu 𝜃1= 0,041, 𝜃2= 0,034, dan 𝜃3 = 0.023.
Dari data pada Tabel 7 dapat dilihat dengan koordinat yang berbeda tetapi memiliki nilai sudut yang identik sehingga dapat diketahui bahwa sifat dari inverse kinematics yaitu memiliki hasil lain tetapi menuju titik yang sama dengan forward kinematics.
4. KESIMPULAN
Dari hasil tahapan perancangan, implementasi dan analisis hasil pengujian yang dilakukan maka dapat dibuat kesimpulan sebagai berikut.
1. Pada perancangan metode inverse kinematics robot lengan untuk proses
pemindahan barang dilakukan secara matematis menggunakan fungsi trigonometri. Dari hasil perhitungan matematis kemudian di implementasikan dalam bentuk kode pemrograman pada arduino uno.
2. Dari hasil pengujian waktu pencapaian titik koordinat dapat dianalisis untuk memindahkan barang pada kelima motion memiliki waktu rata-rata selama 6 - 7 detik.
3. Hasil pengujian ketepatan sudut motor servo yang dilakukan sebanyak 10 kali pada 2 buah masing-masing motor servo didapatkan rata-rata persentase error sebesar 0,64%.
4. Dari hasil pengujian perbandingan rumus forward kinematics, rata-rata selisih sudut yang dihasilkan sebesar 𝜃1= 0,041, 𝜃2= 0,034, dan 𝜃3= 0,023.
5. DAFTAR PUSTAKA
Kapila, Vikram.1997.Introduction to Robotics
New York. Tersedia di
mechatronics.poly.edu <diakses tanggal 2 November 2016>
Setiawan, Eko. 2015. Robotics lecture nodes (Indonesia version). Faculty of computer science and engineering. Malang: Brawijaya University
Saefullah,A. Immaniar,D. Reza,A.2014.Sistem Kontrol Robot Pemindah Barang Menggunakan Aplikasi Android Berbasis Arduino Uno. ISSN, vol.8, No.2.
Fajar, M.,2013.Material Handling. Tersedia melalui: Intelligent of the dawn <muhammadfajar.16mb.com> [Diakses 5 April 2017].
Tri, Gita dan Setiawan, E. eds.,2014. Robot Lengan Pemindah Barang Berdasarkan Ukurannya Berbasis Mikrokontroler. Palembang: AMIK MDP.
Hamidah, S. Panjaitan, S. & Triyanto, D.2013.Sistem Pengendali Robot Lengan Menggunakan Pemrograman Visual Basic. Pontianak: Universitas Tanjungpura. Tersedia di : <portalgaruda.org> [Diakses 14 November 2016].
Rus, Daniela.2011.Robotics System and Science Lecturer 14 : Forward and Inverse Kinematics. :MIT. Tersedia di : <academia.edu> [Diakses 14 November 2016].
Alegiaco.Dynamixel AX-12A and Arduino: How to Use The Serial Port. Tersedia di : <Robottini.Altervista.org> [Diakses 18 November 2016].
Wiria, D., 2010.Perancangan Sistem Kontrol Robot Lengan yang Dihubungkan dengan Komputer. Majalah Ilmiah Mektek, Tahun XII, pp.03.
Fang, J., Lie, W., 2013. Four Degrees of Freedom SCARA Robot Kinematics Modeling and Simulation Anaysist. Jilin Institute of Technology.
Syam, R. 2015. Kinematika dan Dinamika Robot Lengan. Makassar: Universitas Hasanuddin.
Florinnicolescu, A., Ilie, F., Alexandrue, T., 2015. Forward and Inverse Kinematics Study fro Industrial Robot Taking into Account Constructive and Functional Parameter’s Modelling. Romana: University “Politechnica” of Bucharest. Proceding in Manufacturing System, Volume 4, pp.157-164.
Aristidou, A., Lasenby, J., 2009. Inverse Kinematics: a Review of Existing Techniques and introduction of a New fast Iterative Solve. Cambridge: Cambridge University.
Kucuk, Serdar., Bingul, Zafer., 2006. Industrial Robotics: Theory, Modelling and Control. Austria: Pro Literatur Verlag. Nortman, S., et al., 2001. Construction and
Kinematics Analysist of an Antrhomorphic Mobile Robot. Gainesville: University of Florida.