6 BAB II
DASAR TEORI
2.1. Pemetaan
Peta adalah penyajian grafis dari seluruh atau sebagian permukaan bumi pada suatu bidang datar dengan skala dan sistem proyeksi peta tertentu. Peta menyajikan unsur-unsur di permukaan bumi dengan cara memilih, menyeleksi atau generalisasi sesuai dengan maksud dan tujuan pembuatan peta tersebut.
2.1.1. Skala Peta
Sakla Peta secara langsung akan menentukan tingkat kedetailan dari informasi yang disajikan. Semakin besar skala peta, maka semakin besar rinci informasi yang disajikan, namun cakupan daerah yang dipetakan semakin kecil. Contoh pembagian peta menurut skala dapat dilihat pada tabel 2.1
No Skala Golongan
1 Lebih kecil dari 1 :1 000 000 Atlas (Chart) 2 1:100 000 1:1 000 000 Peta skala kecil 3 1:25 000 1: 100 000 Peta skala sedang 4 1:10 000 1: 25 000 Peta skala besar 5 Lebih besar dari 1: 10 000 Peta teknik
Tabel 2.1 Jenis Peta menurut Skala 2.1.2. Pemetaan
Secara umum, dasar pembuatan peta dapat dinyatakan seperti Gambar 2.1
7 Pengumpulan data merupakan rangkaian pekerjaan sejak awal sampai seluruh data terkumpul dan siap diolah. Pengumpulan data terdiri atas:
1. Pembuatan kerangka dasar pemetaan (horizontal dan vertikal) 2. Pemetaan detail situasi
3. Pengumpulan data kualitatif
Pengolahan Data adalah proses hitungan data yang telah dikumpulkan. Pengolahan data terdiri atas:
1. Hitungan kerangka dasar 2. Hitungan titik setail situasi
3. Plotting ( Titik-titikik kerangka dasar, detail, dan ketinggian)
Penyajian adalah proses kartografi dari data yang telah diolah. Penyajian terdiri atas:
1. Pemilihan bahan untuk penggambaran akhir 2. Pemilihan dan penentuan simbol
3. Penetapan pembagian lembar peta 4. Proses pencetakan
2.1.3. Tachymetry
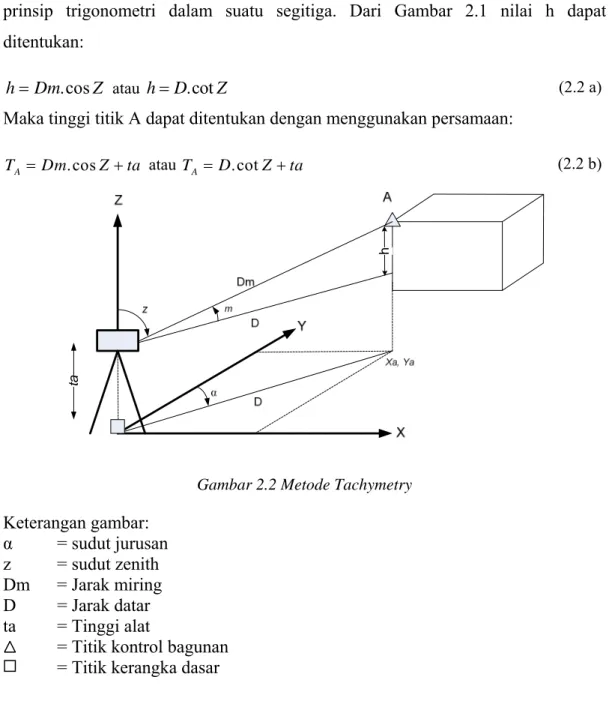
Metode pengukuran titik detail adalah dengan menggunakan metode tachymetry. Metode Tachymetry merupakan metode penentuan posisi dengan menggunakan Metode Polar untuk penetuan titik horizontalnya dan metode trigonometrik untuk penetuan titik tingginya.
Metode Polar adalah penentuan koordinat horizontal dengan melakukan pengukuran sudut (α) dan jarak (D) dengan hubungan matematis sebagai berikut:
8 1 1 .sin .cos A A X X D Y Y D α α = + = + (2.1)
Metode trigonometrik merupakan metode penentuan tinggi dengan menerapkan prinsip trigonometri dalam suatu segitiga. Dari Gambar 2.1 nilai h dapat ditentukan:
.cos
h=Dm Z atau h=D.cotZ (2.2 a)
Maka tinggi titik A dapat ditentukan dengan menggunakan persamaan: .cos
A
T = Dm Z +ta atau TA =D.cotZ +ta (2.2 b)
ta
h
Gambar 2.2 Metode Tachymetry Keterangan gambar: α = sudut jurusan z = sudut zenith Dm = Jarak miring D = Jarak datar ta = Tinggi alat
= Titik kontrol bagunan = Titik kerangka dasar
9 2.2. Teori Close Range Photogrametry (CRP)
Fotogrametri adalah seni, ilmu dan teknologi untuk memperoleh informasi terpecaya tentang objek fisik dan lingkungan melalui proses perekaman, pengukuran, dan intrepetasi gambaran fotografik dan pola radiasi tenaga elektromagnetik yang terekam (Wolf, 1983). Istilah CRP diperkenalkan sebagai suatu teknik fotogrametri dengan jarak antara kamera dengan objek kurang dari 100 m. (Cooper & Robson, 1996).
2.2.1. Kondisi kesegarisan CRP
Kondisi ini merupakan konsep mendasar dari fotogrametri. Kondisi kesegarisan (Colinearity) adalah kondisi dimana titik objek pada dunia nyata, titik pusat proyeksi, dan titik objek di foto terletak dalam satu garis lurus. Kondisi kesegarisan pada CRP sama dengan fotogrametri udara, namun dengan posisi kamera yang terletak di permukaan bumi.
10 Berdasarkan kondisi kesegarisan, vektor adan A berada dalam suatu garis lurus yang berasal dari pusat proyeksi (XL,YL,ZL). Bila kedua vektor berada dalam
sistem koordinat yang sama (sistem koordinat berkas), maka hubungan kedua vektor tersebut dapat dituliskan sebagai berikut:
[ ]
=
a k R A (2.3)
Dimana k adalah faktor skala dan R merupakan matriks rotasi. Vektor a dan A masing-masing adalah sebagai berikut:
− ⎡ ⎤ ⎢ ⎥ =⎢ − ⎥ ⎢ − ⎥ ⎣ ⎦ a o a o x x a y y f − ⎡ ⎤ ⎢ ⎥ =⎢ − ⎥ ⎢ − ⎥ ⎣ ⎦ A L A L A L X X A Z Z Y Y (2.4)
Dalam CRP, sumbu x pada sistem koordinat foto sejajar dengan sumbu X pada sistem tanah, sumbu zpada sistem koordinat foto sejajar dengan sumbu Y pada sistem koordinat tanah, dan sumbu ysistem koordinat foto sejajar dengan sumbu Z pada sistem koordinat tanah.
Sesuai dengan persamaan (2.1), maka untuk satu titik objek A dan titik citra a yang terlihat pada foto dapat ditulis dalam persamaan matriks sebagai berikut:
11 12 13 21 22 23 31 32 33 − − ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎢ − ⎥= ⎢ ⎥ ⎢ − ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ − ⎥ ⎢ ⎥ ⎢ − ⎥ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ a o A L a o A L A L x x m m m X X y y k m m m Z Z f m m m Y Y (2.5)
Atau dapat ditulis dalam bentuk:
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
11 12 13 21 22 23 31 32 33 − = ⎡⎣ − + − + − ⎤⎦ − = ⎡⎣ − + − + − ⎤⎦ − = ⎡⎣ − + − + − ⎤⎦ a o A L A L A L a o A L A L A L A L A L A L x x k m X X m Z Z m Y Y y y k m X X m Z Z m Y Y f k m X X m Z Z m Y Y (2.6)Dengan membagi baris pertama dan kedua masing-masing terhadap baris terakhir dalam persamaan (2.4), maka didapatkan persamaan:
11
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
11 12 13 31 32 33 21 22 23 31 32 33 − + − + − − = − − + − + − − + − + − − = − − + − + − A L A L A L a o A L A L A L A L A L A L a o A L A L A L m X X m Z Z m Y Y x x f m X X m Z Z m Y Y m X X m Z Z m Y Y y y f m X X m Z Z m Y Y (2.7) Dimana: , a ax y = Koordinat titik A di foto ,
o o
x y = Koordinat titik utama , ,
A A A
X Y Z = Koordinat titik A di permukaan bumi , ,
L L L
X Y Z = Koordinat pusat pemotretan f = Panjang fokus kamera
ij
m = Elemen matriks rotasi yang diberikan oleh persamaan (2.6)
. .
cos .cos sin .sin .cos sin .sin cos .sin .cos sin .sin
cos .sin sin .sin .sin cos .cos cos .sin .cos sin .cos
sin sin .cos cos .cos
R R R R R ω ϕ κ ω κ ω ϕ κ ω κ ω ϕ κ ω κ ω κ ω ϕ κ ω κ ω ϕ κ ω κ ϕ ω ϕ ω ϕ = + − + ⎡ ⎤ ⎢ ⎥ =⎢ − + + ⎥ ⎢ − ⎥ ⎣ ⎦ (2.8) Persamaan (2.8) disebut juga persamaan kesegarisan terestris. Persamaan ini dapat digunakan bagi hampir semua masalah dalam CRP, termasuk dalam proses kalibrasi kamera untuk memecahkan unsur orientasi bagian dalam kamera dengan menambahkan koefisien distorsi lensa pada persamaan tersebut.
Jika ada dua pasang foto yang saling bertampalan maka selain digunakan untuk melakukan pengamatan stereo, dapat pula digunakan untuk melakukan pengukuran posisi titik – titik baru dengan menggunakan persamaan kolineraritas. Secara umum, pengukuran titik – titik baru ini terdiri atas dua tahap yaitu reseksi ruang dan interseksi ruang.
12 2.1.2. Reseksi Ruang
Metode reseksi ruang dengan kolinearitas merupakan metode numerik yang secara serentak menghasilkan enam unsur orientasi luar (exterior orientation). Orientasi luar ini (Xo, Yo, Zo, ω,φ,κ) merupakan posisi dan orientasi kamera pada saat pemotretan. Posisi dan orientasi kamera diperlukan untuk dapat menentukan posisi dari titik objek relatif dari sistem koordinat kamera.
Sesuai dengan persamaan (2.8) dengan dua persamaan yang mungkin bagi tiap titik kontrol, sejumlah enam persamaan diperoleh dari tiga titik kontrol. Sistem persamaan ini diselesaikan secara serentak untuk enam koreksi yang tak diketahui, dan kemudian koreksi ini ditambahkan pada nilai awal untuk memperoleh nilai yang direvisi. Iterasi dilakukan hingga diperoleh nilai koreksi yang dapat diabaikan.
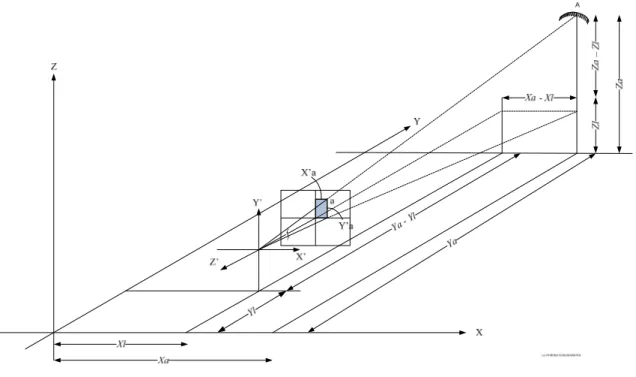
2.1.3. Interseksi Ruang
Untuk objek yang sama di dunia nyata kedua berkas sinar akan saling berpotongan. Interseksi ruang merupakan metode untuk menentukan koordinat medan X,Y,Z titik – titik pada daerah pertampalan pasangan foto stereo dengan menggunakan persamaan kolinearitas. Hal ini dapat dilakukan jika posisi kamera dan orientasinya telah diketahui (Gambar 2.2).
13 Gambar 2.4 Interseksi 2 berkas sinar (Cooper & Robson, 1996)
2.3. Kalibrasi Kamera
Kamera jenis ini sangat mudah didapatkan dan harganya relatif murah. Kamera digital adalah kamera yang menggunakan sensor elektronik (CCD atau CMOS) untuk merekam gambar dan menyimpan hasilnya dalam bentuk dijital. Kamera non metrik adalah kamera yang ketelitian geometrik nya tidak (belum) diketahui.
Kalibrasi kamera adalah proses menentukan parameter interior dari sebuah kamera. Parameter interior dibutuhkan untuk dapat merekonstruksi ulang berkas berkas sinar pada saat pemotretan dan untuk mengetahui besarnya kesalahan sistematik dari sebuah kamera.
2.3.1. Parameter kalibrasi kamera
Selama kalibrasi kamera, kita akan memperoleh unsur-unsur dari orientasi dalam, yang terdiri dari :
14 1. Panjang focus/Principal Distance/Focal Length ( f )
Panjang fokus adalah jarak tegak lurus antara titik pusat lensa (titik fokus) dengan bidang proyeksi kamera (CCD/CMOS dalam kamera digital, atau film dalam kamera analog). Umumnya dari metadata sebuah foto digital dapat diketahui panjang fokusnya, namun nilainya adalah nilai pendekatan dari pabrik pembuat kamera tersebut. Untuk pekerjaan fotogrammetri dibutuhkan nilai yang pasti dari panjang fokus ini, karena akan berhubungan dengan hasil pengukuran obyek. Oleh karena itu kalibrasi kamera diperlukan.
2. Posisi titik utama foto (Xp,Yp)
Titik utama adalah titik hasil proyeksi tegak lurus titik pusat perspektif (titik pusat proyeksi) pada bidang foto. Posisi ini dinyatakan dengan Xp dan Yp yang
merupakan koordinat titik utama dalam sistem koordinat fidusial. Sistem koordinat fidusial adalah sistem kordinat yang berpangkal pada titik pusat fidusial, dimana sumbu X positif adalah garis lurus yang menghubungkan dua titik fidusial yang berhadapan (sejajar arah jalur pemotretan). Sedangkan sumbu Y positif adalah tegak lurus berlawanan arah jarum jam dari sumbu X positif.
3. Distorsi lensa
Distorsi lensa dapat menyebabkan bergesernya titik citra pada foto dari posisi yang sebenarnya, sehingga memberikan ketelitian pengukuran yang kurang baik. Distorsi lensa tak akan mempengaruhi kualitas ketajaman foto yang dihasilkan. Namun untuk pekerjaan fotogrametri, besarnya distorsi tak dapat diabaikan. (Fryer, Camera Calibration for Non Topographic Photogrammetry, 1989). Distorsi Lensa diklasifikasikan menjadi dua macam, yaitu distorsi radial dan distorsi tangensial (decentering).
15 • Distorsi radial (K1, K2, K3)
Distorsi radial merupakan “aberasi” lensa yang menyebabkan sinar datang yang masuk melalui lensa kamera mengalami deviasi setelah melewati titik pusat proyeksi lensa. Deviasi ini terjadi akibat tidak sempurnanya komposisi lensa. Distorsi lensa akan mengakibatkan pergeseran bayangan ke arah radial terhadap titik utama. Distorsi radial (δ ) dapat ditentukan dengan menggunakan persamaan r polinomial sebagai berikut (Fryer, Camera Calibration, 1996):
3 5 7
1 2 3 ...
r K r K r K r
δ = + + + (2.10)
Dimana Ki adalah koefisien polynomial distorsi radial ( i = 1,2,3,…) dengan fokus tak hingga, rδ dalam mikrometer (μ) dan r adalah jarak radial titik citra terhadap titik utama foto dengan nilai:
(
) (
2)
2i p i p
r= X −X + Y −Y (2.11)
Dimana X Yi, i,Xp,Ypdalam millimeter.
Untuk kebanyakan lensa, 3 koefisien dirasakan cukup untuk menjelaskan kurva distorsi secara lengkap. Tapi untuk lensa fish eye mungkin diperlukan tambahan koefisien (Fryer, Camera Calibration for Non Topographic Photogrammetry, 1989).
• Distorsi tangensial (P1, P2)
Semua elemen dalam sistem lensa idealnya harus diatur sejajar dengan sumbu optis dari seluruh sistem lensa. Pergeseran vertikal ataupun rotasi pada elemen lensa dari susunan yang sempurna akan mengakibatkan pergeseran geometrik dari foto yang dikenal distorsi tangensial. Distorsi tangensial mempunyai komponen radial dan tangensial. Pergeseran ini dideskripsikan denngan 2 persamaan polinomial untuk pergeseran pada arah x (δx) dan y (δy) (Cooper & Robson, 1996).
16
(
)
(
)(
)
(
)
(
)(
)
2 2 1 2 2 2 1 2 2 2 2 2 o o o o o o x P r x x P x x y y y P r y y P x x y y δ δ ⎡ ⎤ = ⎣ = − ⎦+ − − ⎡ ⎤ = ⎣ = − ⎦+ − − (2.12)2.3.2. Metode Kalibrasi kamera
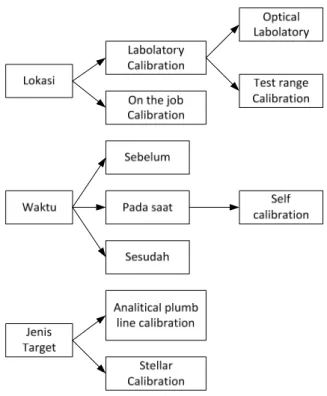
Kalibrasi kamera dapat dilakukan berdasarkan tiga hal (Soemarto 2007 dalam Hanifa 2007):
1. Berdasarkan lokasi
Kalibrasi kamera dapat dilakukan dengan metode laboratory calibration serta on the job calibration. Laboratory calibration dilakukan di labolatorium terpisah dengan proses pemotretan objek. Metode yang termasuk di dalamnya antara lain optical laboratory dan test range calibration. Secara umum metode ini biasanya diaplikasikan untuk jenis kamera metrik. On the job calibration merupakan teknik penentuan parameter kalibrasi kamera yang dilakukan bersamaan dengan pelaksanaan pemotretan objek, biasanya dengan menggunakan objek yang telah diketahui ukuran geometri nya.
2. Berdasarkan waktu
Kalibrasi kamera dapat dilakukan sebelum proses bundle adjustment, pada saat bundle adjustment, maupun sesudah bundle adjustment. Kalibrasi pada saat pemotretan dikenal dengan self calibration. Pada self calibration pengukuran titik – titik target pada objek pengamatan digunakan sebagai data untuk penentuan titik objek sekaligus untuk menentukan parameter kalibrasi kamera.
3. Berdasarkan jenis target
Metode kalibrasi jenis ini antara lain dengan analytical plumb line dan stellar callibration.
17 Untuk kamera non metrik, jenis kalibrasi yang dapat dilakukan adalah metode On the job calibration dan self calibration, karena kedua metode ini dapat mengliminasi efek dari ketidak stabilan orientasi dalam dari kamera. Pada penelitian ini digunakan metode self calibration.