i
TUGAS AKHIR
Diajukan Untuk Memenuhi Salah Satu Syarat Memperoleh Gelar Sarjana Teknik
Program Studi Teknik Elektro
Fakultas Sains dan Teknologi Universitas Sanata Dharma
Disusun oleh:
COSMAS PUNGKAS AQUILLA
NIM : 045114021
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
ii
FINAL PROJECT
Presented as Partial Fulfillment of the Requirements To Obtain the SARJANA TEKNIK Degree
in Electrical Engineering
Faculty Science and Technology of Sanata Dharma University
By:
COSMAS PUNGKAS AQUILLA
NIM : 045114021
ELECTRICAL ENGINEERING STUDY PROGRAM
SCIENCE AND TECHNOLOGY FACULTY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
ELEKTRONIK
(HEART BEAT MONITORING USING ELECTRONIC STETHOSCOPE)
Disusun oleh:
COSMASPUNGKASAQ~LA
NlM :045114021
Telah disetujui oleh:
PembirnbingI:
B. Wuri Harini, S.T., M.T.
..
Pembirnbing II:
III
Tanggal : 18Juni2008
atau bagian karya orang lain, kecuali yang telah disebutkan dalam kutipan dan daftar pustaka, sebagaimana layaknya karya ilmiah.
vi
yang sedang berkembang di Indonesia.
You’ll never walk alone...
Yang bertanda tangan di b a d ini, saya mahasiswa Universitas Sanata Dharma: Nama : Cosmas Pungkas Aquilla
NIM :045114021
Demi pengembangan ilmu pengetahuan, saya memberikan kepada Perpustakaan Universitas Sanata Dharma karya ilmiah saya yang berjudul:
PEMANTAUAN D E N W T JANTUNG DENGAN STETOSKOP ELEKTRONIK
Dengan demikian saya memberikan kepada Perpustakaan Sanata Dharma hak untuk menyimpan, mengalihkan dalam bentuk media lain, mengelolanya dalam bentuk pangkalan data, mendistribusikannya secara terbatas, dan mempubliasikannya di Internet atau media lain untuk kepentingan akademis tanpa perlu meminta ijin dari saya maupun memberikan royalti kepada saya selama tetap mencantumkan nama saya sebagai penulis.
Dernikian pemyataan ini saya buat dengan sebenarnya
Yogyakarta, 10 Maret 2008 Yang Menyatakan,
vii
viii
meningkatkan kualitas hidupnya melalui peningkatan kualitas kesehatan. Jantung sebagai organ vital harus tetap dijaga kesehatannya. Mengetahui ritme detak jantung merupakan salah satu cara untuk menjaga kesehatan jantung. Jantung yang bekerja terlalu cepat atau terlalu lambat akan mengganggu keseimbangan tubuh.
Alat pengukur detak jantung ini menggunakan sebuah stetoskop sebagai penangkap suara akustik dari denyut jantung. Suara dari stetoskop analog akan diubah menjadi sinyal elektrik. Dengan menggunakan sebuah mikrokontroler, sinyal elektrik diubah menjadi data digital dan diolah untuk menentukan jumlah denyut jantung setiap menit. Hasil pengolahan data digital ini ditampilkan melalui suatu penampil dan data digital ini dapat juga dikirimkan secara wireless ke alat lain (misalnya: komputer personal) untuk pengolahan lebih lanjut.
Penelitian ini telah berhasil membuat suatu alat pemantau detak jantung. Alat ini dapat digunakan untuk penggunaan sehari-hari.
ix
quality of life by increasing the quality of healthcare. The health of the heart, as a vital organ, needs to be well cared for. Knowing the heart beat rhythm is one way of taking care of the heart. A heart that is working too quickly or too slowly will negatively influence the balance of the body.
This heart beat measurement device uses a stethoscope as an acoustic voice collector from the heartbeat. The analogue voice from the stethoscope will be changed into an electrical signal. A Microcontroller changes the electrical signal into digital data and processes it to determine the number of heart beats every minute. The result is shown through a display and it can also be sent via wireless technology to other devices (for example: a personal computer) for further processing.
This research has succeeded in producing a heart beat monitoring device that is suitable for daily usage.
x
karya ini. Karya ini dimaksudkan penulis untuk memenuhi salah satu syarat memperoleh gelar sarjana teknik program studi Teknik Elektro.
Penulis sadar bukan hanya kekuatan dalam diri sendiri yang menjadi penggerak tetapi banyak dukungan dari berbagai pihak sehingga penulis ingin mengucapkan terima kasih kepada :
1. Tuhan Yesus Kristus, sumber segala inspirasi.
2. Kedua orang tua penulis atas perhatian, kasih sayang, dukungan baik moral maupun materil, kesabaran, dan ketabahan. Engkau laksana oase di padang gurun.
3. Ibu B. Wuri Harini, S.T., M.T. selaku dosen pembimbing I atas segala kesabaran, dukungan baik moral maupun materil, dan dedikasi yang tinggi. 4. Bapak Ir. Tjendro selaku dosen pembimbing II atas segala bantuan, sharing
pengalaman, dan dedikasi.
5. Seluruh dosen dan staff di Tenik Elektro pada khususnya dan Fakultas Sains dan Teknologi pada umumnya yang telah membantu penulis dalam menyelesaikan studi.
xi
9. Teman-teman Teknik Elektro, Kos Paingan 100, dan Mitra Perpustakaan atas kebersamaannya selama ini.
10.Semua pihak yang tidak dapat penulis sebutkan satu per satu yang telah membantu penulis hingga terselesaikannya tugas akhir ini.
Harapan penulis, semoga karya ini dapat berguna bagi penulisan karya sejenis di masa-masa yang akan datang. Oleh karena itu, penulis tidak menutup kemungkinan untuk kritik dan saran yang membangun dari banyak pihak. Akhir kata, selamat membaca karya ini.
Yogyakarta, 3 Maret 2008
xii
HALAMAN PERSETUJUAN PEMBIMBING…….……… iii
HALAMAN PENGESAHAN……… iiii
PERNYATAAN KEASLIAN KARYA……… v
MOTTO DAN PERSEMBAHAN….……… vi
PERNYATAAN PERSETUJUAN PUBLIKASI KARYA ILMIAH... vii
INTISARI…..……… viii
ABSTRACT..……… ix
KATA PENGANTAR……...……… x
DAFTAR ISI..……… xii
DAFTAR TABEL…..……… xvii
DAFTAR GAMBAR.……… xix
BAB I PENDAHULUAN…………..……… 1
1.1.Judul……….……… 1
1.2.Latar Belakang Masalah...……… 1
1.3.Tujuan dan Manfaat…….……… 2
1.4.Batasan Masalah...……… 2
1.5.Metode Penelitian……….……… 3
xiii
2.3. Mikrofon ...……… 9
2.3.1.Mikrofon Kondenser... 9
2.3.2. Mikrofon Kondenser Elektret ( Magnet Elektrostatis)... 11
2.4. Penguat Operasional (Op-Amp)...……… 12
2.4.1. Penguat Pembalik (Inverting Amplifier)……… 13
2.4.1.1. Penguat Pembalik DC……… 13
2.4.1.2. Penguat Pembalik AC……… 15
2.4.2. Penguat Bukan Pembalik……… 16
2.4.2.1. Penguat Bukan Pembalik DC……….……… 16
2.4.2.2. Penguat Bukan Pembalik AC ……… 17
2.4.2.3. Konfigurasi Pengikut Tegangan……… 19
2.5. Penapis Aktif Elektronik...…..……… 20
2.5.1. Penapis Aktif Butterworth Pelewat Bawah ……… 21
2.5.2. Karakteristik Penapis Butterworth..……… 23
2.5.3. Perancangan Penapis Butterworth..……… 24
2.5.3.1. Penskala Frekuensi……… 25
2.5.3.2. Penskala Impedansi……… 26
2.5.4. Jumlah Kutub……..……… 26
xiv
2.6. Penguat Transistor Konfigurasi Umpan Balik Tegangan
Kolektor ...……… 30
2.6.1. Analisa DC..……… 30
2.6.2. Analisa AC..……… 34
2.7. Penguat Daya...……… 35
2.8. Mikrokontroler ATmega32……..……… 36
2.8.1. Pengubah Analog ke Digital……… 37
2.8.1.1. Algoritma SAR……..……… 38
2.8.1.2. ADC pada Mikrokontroler ATmega32……..…… 40
2.8.2. Pewaktu 8 bit……….. 41
2.8.3. UART……..……… 42
2.8.3.1. USART……… 43
2.9. LCD (Liquid Crystal Display) 16 x 2 karakter……… 46
2.9.1. Pengendali Modul LCD…..……… 47
2.9.2. Deskripsi Fungsi….……… 50
2.9.2.1. Register……..……… 50
2.9.2.2. Bendera Sibuk (BF)……… 51
2.9.2.3. Penghitung Alamat (AC)……… 51
xv
BAB III PERANCANGAN ALAT…..………... 55
3.1. Perancangan Perangkat Keras…..……… 56
3.1.1. Stetoskop Akustik dan Mikrofon……..………... 56
3.1.2. Penguat Awal………... 57
3.1.2.1.Penguat Awal Transistor... 57
3.1.2.2.Penguat Variabel Bukan Pembalik AC... 59
3.1.3. Penapis Aktif Butterworth………... 61
3.1.3.1. Penapis Pelewat Bawah Butterworth Orde Enam..………... 61
3.1.4. Penguat Daya Rendah………... 64
3.1.5. Konfigurasi ATmega32………... 65
3.2. Perancangan Perangkat Lunak….……….. 67
3.2.1. Program Utama……….……….... 67
3.2.2. Pengiriman Data……….... 69
3.2.3. Pencari Puncak..……….... 72
3.2.4. Penghitung rerata BPM………... 74
3.2.5. Pengisian LCD..……….... 74
BAB IV HASIL DAN PEMBAHASAN……… 78
xvi
4.5. Hasil Pengiriman Data ke PC…..……… 91
4.6. Analisa Perangkat Keras..……… 92
4.6.1 Penguat Awal….………... 92
4.6.1.1 Penguat Awal Transistor…….………... 92
4.6.1.2 Penguat Bukan Pembalik AC……….. 93
4.6.2 Penapis Pelewat Rendah………... 93
4.7. Analisa Perangkat Lunak.……… 95
4.7.1. Analisa Metode Komunikasi….……….... 105
BAB V KESIMPULAN DAN SARAN……….……… 109
5.1 Kesimpulan……… 109
5.2 Saran…….……… 110
DAFTAR PUSTAKA...……… 111
xvii
Butterworth orde tinggi……… 23
2. Tabel 2.2 Tabel perhitungan Baud Rate dan UBRR……… 45
3. Tabel 2.3 Keterangan fungsi dari tiap pin LCD ……… 48
4. Tabel 2.4 Daftar instruksi kontroler modul LCD ……… 48
5. Tabel 2.5 Daftar keterangan tabel instruksi kontroler LCD pada tabel 2.4……… 49
6. Tabel 2.6 Pemilihan Register……… 50
7. Tabel 2.7 Register inisialisasi modem RF……… 53
8. Tabel 3.1 Nilai C/Kf.……… 62
9. Tabel 3.2 Nilai Kr pada setiap tingkat..……… 63
10.Tabel 3.3 Nilai kapasitor dan resistor aktual……… 63
11.Tabel 3.4 Nilai osilator untuk baud rate 9600 bps...……… 65
12.Tabel 3.5 Inisialisai modem RF………... 71
13.Tabel 4.1 Gangguan-gangguan sinyal detak jantung... 83
14.Tabel 4.2 Perbandingan detak terukur dan terhitung………... 85
15.Tabel 4.3 Perbandingan pengujian digitalisasi alat dengan alat ukur OMRON... 88
xviii
xix
2. Gambar 2.2 Chestpiece dari stetoskop……….. 8
3. Gambar 2.3 Mikrofon kondenser………... 9
4. Gambar 2.4 Mikrofon kondenser elektret ……… 11
5. Gambar 2.5 Rangkaian penguat pembalik……… 14
6. Gambar 2.6 Penguat pembalik AC……… 15
7. Gambar 2.7 Rangkaian penguat bukan pembalik..……… 16
8. Gambar 2.8 Penguat bukan pembalik……… 17
9. Gambar 2.9 Penguat bukan pembalik dengan catu daya tunggal..…… 18
10.Gambar 2.10 Rangkaian pengikut tegangan..……… 19
11.Gambar 2.11 Penapis pasif HPF.………... 20
12.Gambar 2.12 Penapis pasif LPF.……… 20
13.Gambar 2.13 Rangkaian LPF Butterworth orde 2.……… 22
14.Gambar 2.14 Rangkaian LPF Butterworth orde 3.……… 22
15.Gambar 2.15 Kaskade Butterworth orde tinggi….……… 23
16.Gambar 2.16 Karakteristik penapis Butterworth………... 24
17.Gambar 2.17 Tanggapan frekuensi Butterworth………... 28
xx
gambar 2.19...…… 31
21.Gambar 2.21 Kalang kolektor-emitor untuk gambar 2.19..………… 33
22.Gambar 2.22 Konfigurasi umpan balik kolektor .……… 34
23.Gambar 2.23 Pendekatan model re konfigurasi umpan balik kolektor……… 34
24.Gambar 2.24 Algoritma SAR…..……… 39
25.Gambar 2.25 Lapisan penyusun LCD..……… 46
26.Gambar 2.26 LCD Dot matrix 16 x 2 karakter……… 48
27.Gambar 2.27 Hubungan antara alamat DDRAM dan posisi pada LCD……….…… 51
28.Gambar 3.1 Blok diagram Stetoskop Elektronik….……… 55
29.Gambar 3.2 Panasonic WM-60A mikrofon kondenser elektret..…… 56
30.Gambar 3.3 Rangkaian prasikap DC untuk mikrofon kondenser…… 57
31.Gambar 3.4 Rangkaian penguat awal transistor..……… 59
32.Gambar 3.5 Implementasi penguat bukan pembalik AC... 60
33.Gambar 3.6 Penapis butterworth orde enam dengan nilai ternormalisasi………. 62
xxi
39.Gambar 3.12 Diagram alir pengiriman data..……… 71
40.Gambar 3.13 Diagram alir pencari puncak……… 73
41.Gambar 3.14 Diagram alir penghitung rerata BPM……… 73
42.Gambar 3.15 Tampilan LCD yang dikehendaki.……… 75
43.Gambar 3.16 Diagram alir inisialisasi LCD……… 75
44.Gambar 3.17 Diagram alir pengisian LCD..……… 76
45.Gambar 3.18 Rutin penulisan data ke LCD….……… 77
46.Gambar 4.1 Gambar papan utama……… 79
47.Gambar 4.2 Stetoskop dan penguat awal transistor.……… 79
48.Gambar 4.3 Hasil pengukuran detak jantung……...……… 81
49.Gambar 4.4 Tampilan bila tidak ada detak yang terdeteksi.………… 81
50.Gambar 4.5 Denyut yang diperoleh pada awal iterasi, diambil pada arteri leher... 81
51.Gambar 4.6 Denyut yang diperoleh pada awal iterasi, diambil pada Dada... 81
52.Gambar 4.7 Data ADC yang diterima PC……… 87
53.Gambar 4.8 Sinyal analog detak jantung .……… 87
1.1.
Judul
Pemantau Denyut Jantung dengan Stetoskop Elektronik
1.2.
Latar Belakang Masalah
Jantung sebagai pusat dari peredaran darah dalam tubuh manusia memiliki peranan yang sangat vital. Tanpa jantung, manusia tidak akan bisa hidup, karena organ-organ di dalam tubuh akan kekurangan oksigen dan mati. Jantung yang sehat mutlak diperlukan seseorang. Tanpa jantung yang sehat, seseorang akan kehilangan kualitas hidup. Mengetahui ritme detak jantung merupakan salah satu cara untuk menjaga kesehatan jantung. Jantung yang bekerja terlalu cepat akan mengganggu keseimbangan tubuh dan juga akan berakibat yang sama bila jantung bekerja terlalu lambat [1].
Fokus dari penelitian ini adalah pembuatan suatu alat yang dapat mengukur detak jantung seseorang dengan tepat, namun juga harus efisien dan ergonomis. Banyak alat serupa terdapat di pasaran, namun alat-alat tersebut memiliki keterbatasan, yaitu belum adanya suatu alat yang memiliki fasilitas pengiriman data ke sebuah alat pengolah data lain yang terintegrasi [2]. Jadi alat ini diharapkan dapat
mengatasi keterbatasan yang ada dan juga dapat mengetahui hasil pengukuran dengan cepat dan tepat.
Penerapan penelitian ini dapat diaplikasikan pada bidang kesehatan. Penggunaan alat ini tidak hanya ditujukan bagi orang-orang yang sudah ahli, namun juga dapat digunakan bagi orang awam karena alat ini didesain untuk user-friendly.
1.3.
Tujuan dan Manfaat
Tujuan yang akan dicapai yaitu menghasilkan suatu alat yang berfungsi untuk memantau detak jantung seseorang.
Manfaat dari penelitian ini yaitu dapat mengetahui irama atau ritme denyut jantung manusia. Bila terjadi ketidaknormalan maka dapat diketahui sejak dini sehingga memperbesar peluang untuk sembuh. Manfaat lain yang didapat yaitu orang awam dapat melakukan sendiri pemeriksaan ritme jantung, sehingga memudahkan orang untuk mengetahui kondisi kesehatannya saat itu juga. Alat ini juga dapat membantu para ahli kesehatan untuk mengetahui denyut jantung seseorang dengan lebih akurat. Hasil pemantauan dapat dikirimkan ke dalam perangkat pengolah data lain, misalnya personal komputer untuk disimpan sebagai arsip medis.
1.4.
Batasan Masalah
elektrik menggunakan mikrofon. Sinyal informasi dari mikrofon akan diolah dengan menggunakan mikrokontroler ATmega32 yang akan dikirimkan ke alat penerima lain, dengan menggunakan modul pemancar dan penerima (transceiver). Informasi mengenai hasil pengukuran yang ditampilkan berupa jumlah detak per menit (beat per minute, BPM), detakan minimum dan detakan maksimum. Alat ini didesain untuk menghitung detak jantung normal manusia. Detak yang dapat diukur mempunyai rentang antara 50-300 detak per menit.
1.5.
Metode Penelitian
Alat ini dirancang dan dibuat dengan menggunakan studi literatur, mempelajari cara kerja alat, serta merencanakan dan membuat peralatan tersebut. Perencanaan dibuat dengan mendisain blok demi blok berdasarkan teori yang sudah didapatkan di bangku kuliah sehingga alat tersebut bisa bekerja sesuai dengan hasil yang diharapkan. Pembuatan dilakukan dengan terlebih dahulu mengetes jalannya alat dengan suatu percobaan pada papan percobaan. Setelah hasil percobaan sesuai dengan yang diharapkan, kemudian alat tersebut dapat dirakit dan dipasang pada suatu PCB. Pengujian alat ini dilakukan dengan pengambilan data, analisis data, dan penarikan kesimpulan.
1.6.
Sistematika Penulisan
BAB I PENDAHULUAN
Bab ini menguraikan tentang pemilihan topik sebagai dasar pemikiran melalui latar belakang penelitian, tujuan dan manfaat dari penelitian, batasan-batasan masalah, metode penelitian, serta sistematika penelitian ini.
BAB II DASAR TEORI
Bab ini memaparkan teori mengenai detak jantung, pengolahan sinyal analog, mikrokontroler, dan penampil yang digunakan dalam pembuatan alat pemantauan detak jantung ini.
BAB III PERACANGAN ALAT
Bab ini akan memaparkan perancangan mengenai alat pemantau detak jantung ini.
BAB IV HASIL DAN PEMBAHASAN
Bab ini berisi mengenai pembahasan dari hasil alat yang telah diperoleh.
BAB V KESIMPULAN DAN SARAN
5
2.1.
Jantung
Jantung terdiri dari empat ruang, yaitu bilik kiri, bilik kanan, serambi kiri, dan
serambi kanan. Fungsi dari serambi yaitu sebagai tempat untuk mengumpulkan darah.
Bilik berfungsi sebagai tempat untuk memompa darah ke seluruh tubuh dan
paru-paru. Darah mengalir dari serambi menuju bilik. Agar darah tidak mengalir menuju
serambi dari bilik, maka ada katup pada jalan masuk dan keluar. Pada saat berdenyut,
setiap ruang jantung mengendur dan terisi darah (disebut diastol); selanjutnya jantung
berkontraksi dan memompa darah keluar dari ruang jantung (disebut sistol). Kedua
serambi dan bilik mengendur dan berkontraksi secara bersamaan [3].
Bunyi-bunyi jantung merupakan suatu vibrasi-vibrasi yang bertalian dengan
akselerasi dan deselerasi tiba-tiba dari darah di dalam sistem kardiovaskular. Bunyi
jantung pertama (S1) dan kedua (S2) terjadi oleh menutupnya katup-katup yang
berkenaan dengan atrium jantung (Atrio Ventrikulae) dan semiluner serta
kejadian-kejadian yang mengiringi penutupan-penutupan ini. Intensitas dari bunyi jantung
pertama (S1) dipengaruhi oleh:
i. Posisi daun-daun mitral (berkenaan dengan katup bikuspid) pada
permulaan kontraksi ventrikel jantung yang mendorong darah masuk
ii. Kecepatan naiknya denyut nadi tekanan bilik kiri.
iii. Ada tidaknya penyakit struktural dari katup mitral.
iv. Jumlah jaringan, rongga atau cairan antara jantung dan stetoskop.
Bunyi jantung pertama dibagi menjadi dua komponen, aorta (A2) atau menutupnya
katup mitral dan pulmonal (P2) atau menutupnya katup trikuspidal. Kedua komponen
berbunyi nyaring dari S1 selama 10 ms sampai 30 ms adalah fenomena normal. Bunyi
jantung ketiga merupakan bunyi bersuara rendah (low picthed) yang terjadi di dalam
bilik 0,14 s sampai 0,16 s setelah A2, pada akhir pengisian cepat. Bunyi jantung
keempat adalah bunyi presistolik berketuk rendah yang terjadi di dalam bilik jantung
pada saat pengisian, diiringi oleh kontraksi serambi yang efektif dan dapat didengar
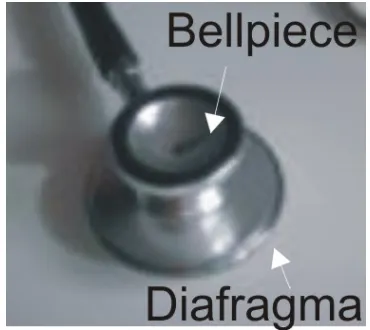
dengan baik melalui mangkuk berongga (bellpiece) dari stetoskop [4].
Gambar 2.1 Detak jantung normal [5].
Pada Gambar 2.1, ‘M’ mampu dibedakan dari S4 dan M1, sinkron dari
permulaan pergerakan keluar. Pembelokan dari M terjadi setelah Q. M mempunyai
satu tanjakan kecil dan pembelokan ke bawah yang besar. Berbagai penelitian telah
dilakukan untuk mengetahui keberadaan dan pewaktuan dari suara jantung. Frekuensi
suara rendah pertama S1 atau ‘M’ terjadi 20 ms setelah gelombang Q dari
elektrokardiogram dan berhubungan dengan puncak dari gelombang R. ‘M’ ini
mempunyai frekuensi natural sekitar 30 – 50 Hz dan dapat dibedakan dari M1 yang
mempunyai frekuensi dan amplitudo yang lebih besar. Dalam kondisi normal, ‘M’
mempunyai amplitudo rendah dan mempunyai durasi sekitar 20 sampai 50 ms,
terkadang berlanjut setelah puncak R selama 20 ms [5].
Dalam sebuah penelitian yang sudah pernah dilakukan sebelumnya [6],
frekuensi detak jantung pertama (S1) pada katup mitral normal, rata-rata berkisar
sekitar 46±2 Hz. Sedangkan pada katup implan yang sudah tertanam selama kurang
dari 1½ tahun memiliki frekuensi sekitar 43±2 Hz dan yang sudah tertanan lebih dari
lima tahun memiliki frekuensi sekitar 50 – 200 Hz.
2.2.
Stetoskop
Stetoskop adalah sebuah alat akustik medis yang digunakan untuk
mendengarkan suara yang ada di dalam tubuh manusia atau hewan. Stetoskop biasa
digunakan untuk mendengarkan suara detak jantung atau pernapasan. Suara ini
digunakan untuk mendiagnose penyakit tertentu. Stetoskop terbagi atas dua jenis,
Stetoskop akustik bekerja dengan cara menyalurkan suara dari chestpieces
melalui selang udara ke telinga pendengar. Chestpiece terdiri dari dua bagian yang
dapat dipergunakan untuk mendengarkan suara dari tubuh manusia, sebuah diafragma
dan sebuah mangkuk berongga (bellpiece). Gambar dari chestpiece disajikan pada
Gambar 2.2. Bila diafragma ditempatkan di atas tubuh, maka suara dari tubuh akan
menggetarkan diafragma dan gelombang tekanan akustik berjalan melalui selang
udara hingga ke telinga pendengar. Bila mangkuk berongga yang ditempatkan dalam
tubuh, maka getaran dari kulit akan menghasilkan gelombang tekanan akustik yang
akan berjalan melalui selang udara hingga ke telinga pendengar. Mangkuk berongga
menghasilkan suara dengan frekuensi rendah, sedangkan diafragma menghasilkan
suara dengan frekuensi yang lebih tinggi. Permasalahan yang timbul dari stetoskop
akustik adalah tingkat kekuatan suara yang sangat rendah [8].
Stetoskop elektronik bekerja dengan cara menguatkan suara yang timbul dari
tubuh. Alat tersebut membutuhkan pengubah suara akustik menjadi sinyal elektronis
yang dapat dikuatkan dan diolah untuk mendapatkan kualitas suara yang lebih baik.
Cara yang paling mudah dan efektif untuk mendeteksi suara dilakukan dengan
memasang sebuah mikrofon di dalam chestpiece. Cara ini bisa mengurangi gangguan
derau [7].
2.3.
Mikrofon
2.3.1.
Mikrofon kondenser
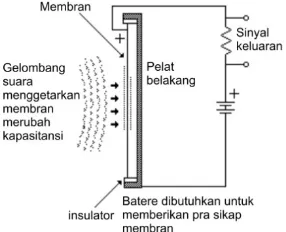
Bagian penting dari mikrofon adalah sebuah membran ringan yang mampu
menghasilkan respon pada frekuensi pendengaran, 20 – 20 KHz dengan baik. Getaran
suara menghasilkan perubahan jarak antara membran dan pelat. Ada dua cara untuk
mendapatkan sinyal audio dari mikrofon ini, yaitu dengan pemberian prasikap DC
dan pemisahan frekuensi radio dari mikrofon kondenser [9].
Dengan adanya prasikap DC, pelat mempunyai muatan sebesar Q. Pelat dan
membran yang terpasang secara paralel menghasilkan kapasitansi sebesar
d A V
Q C= =ε0
(2.1)
dengan
C adalah kapasitas kapasitor (Farad),
Q adalah muatan (Coulomb),
V adalah beda potensial (Volt),
ε0 adalah permisivitas ruang hampa,
A adalah luas penampang (m2), dan
d adalah jarak antara pelat dan membran (m).
Suatu muatan konstan terjaga dalam kapasitor. Ketika jarak antar pelat
berubah akibat adanya getaran oleh suara, muatan di dalam kapasitor berubah. Hal ini
ditunjukkan pada Gambar 2.3. Kapasitas dan nilai dari resistor prasikap membentuk
suatu penapis lewat atas, yang melewatkan frekuensi pendengaran dan menolak bias
DC. Adanya perubahan jarak antara membran dan pelat menyebabkan muatan
berubah, sehingga menghasilkan arus (I) yang mengalir melalui resistor R dengan
(2.2)
t d AV t
Q I
Δ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ Δ =
Δ Δ =
1
0
Perubahan kapasitas dalam kurun waktu tertentu, dalam skala 100 μs, akan
menimbulkan suatu muatan. Tegangan berubah sebagai reaksi atas perubahan
kapasitans. Tegangan yang terukur pada resistor mewakili tekanan suara yang
mengubah-ubah membran [10].
2.3.2.
Mikrofon Kondenser Elektret (Magnet Elektrostatis)
Merupakan tipe dari mikrofon kondenser yang menggunakan suatu bahan
elektret yang terpolarisasi secara permanen sebagai diafragmanya [9]. Gambar dari
mikrofon kondenser elektret disajikan pada Gambar 2.4. Suatu muatan statis diisikan
ke dalam elektret yang ada di dalam bahan membran. Mikrofon tipe ini bekerja
dengan prinsip yang sama dengan mikrofon kondenser.
Gambar 2.4 Mikrofon kondenser elektret [9].
Kualitas kondenser yang lebih baik didapatkan dengan menggunakan transistor
efek-medan (FET) sebagai penguat awal, penyeimbang impedansi masukan yang tinggi
2.4.
Penguat Operasional (
Op-amp
)
Penguat operasional (Op-amp) adalah suatu rangkaian elektronik yang dapat
digunakan untuk mendeteksi dan menguatkan sinyal masukan AC dan DC [11].
Karakteristik dari penguat operasional adalah:
i. Impedansi masukan yang sangat tinggi, yang membuat tidak adanya arus yang
masuk ke terminal masukan.
ii. Penguatan kalang terbuka yang sangat tinggi, menyebabkan perbedaan
tegangan masukan nol.
iii. Impedansi keluaran yang sangat rendah, sehingga tidak terjadi pembebanan
pada keluaran.
Penguat operasional pada rangkaian audio harus mampu memproses sinyal
AC dalam rentang frekuensi antara 20 hingga 20 KHz dengan amplitudo bervariasi
dari beberapa ratus mikrovolt hingga beberapa volt [11]. Penguat operasional harus
mempunyai distorsi minimum, baik amplitudo, harmonisa, fasa dan juga bila
dimungkinkan tidak mempunyai derau.
Penguat operasional untuk penggunaan umum cocok digunakan untuk kerja
audio yang terbatas dalam aplikasi yang tidak kritis. Penguat operasional yang ideal
untuk penggunaan audio memiliki spesifikasi berikut ini:
1. Slew rate tinggi.
2. GBWP tinggi.
4. Tegangan operasi tinggi.
5. Distorsi rendah.
6. Derau masukan rendah.
7. Arus masukan rendah.
8. Mudah digunakan untuk catu daya tunggal.
2.4.1.
Penguat Pembalik (
Inverting Amplifier
)
2.4.1.1.
Penguat Pembalik DC
Salah satu yang paling sering digunakan dalam konfigurasi penguat
operasional tunggal adalah penguat pembalik (inverting amplifier) [12]. Konfigurasi
penguat pembalik disajikan pada Gambar 2.5. Rangkaian penguat pembalik
menggambarkan satu bentuk dari sebuah tegangan sumber terkontrol. Resistansi
dihubungkan di antara terminal bukan pembalik dengan ground untuk
meminimalisasikan efek dari arus prasikap.
Pada asumsi operasi linier stabil, perbedaan tegangan beda pada masukan
didorong untuk menjadi nol, atau . Terminal bukan pembalik akan sama
dengan nol, karena dihubungkan ke ground. Akibatnya terminal pembalik dipaksa
untuk untuk menjadi potensial ground. ( 0 . Kondisi ini akan menjadi ground
semu, yang berarti terminal pembalik tidak benar-benar terhubung ke ground, tetapi
Karena 0, tegangan masukan vi timbul pada Ri. Arus masukan ii
dinyatakan
(2.3)
Dengan asumsi bahwa arus yang masuk ke dalam penguat sama dengan nol dan arus
ii mengalir ke titik pertemuan pada terminal bukan pembalik. Karena tidak ada arus
yang dapat mengalir masuk atau keluar dari penguat, arus harus mengalir melalui Rf.
Tegangan vf dihasilkan dari Rf yang dinyatakan dengan
(2.4)
Gambar 2.5 Rangkaian penguat pembalik [12].
Karena masukan pembalik dari penguat operasional merupakan ground semu,
tegangan keluaran merupakan tegangan yang mengalir pada Rf. Referensi terminal
positif pada sebelah kanan Rf, sehingga
(2.5)
(2.6)
2.4.1.2.
Penguat Pembalik AC
Penguat pembalik AC memiliki rangkaian dasar yang sama dengan penguat
DC, tetapi mempunyai perbedaan oleh adanya kapasitor masukan Ci pada terminal
pembalik (inverting) [11]. Gambar rangkaian penguat pembalik AC disajikan pada
Gambar 2.6. Kapasitor ini mempunyai dua fungsi penting. Pertama, mencegah
masuknya tegangan DC dari tingkat sebelumnya, yang berakibat adanya tegangan DC
yang tidak diinginkan pada keluaran.
Gambar 2.6 Penguat pembalik AC [11].
Hal ini dapat mengakibatkan penguat mengalami saturasi dan distorsi ketika
mendapat masukkan sinyal audio. Kedua, kapasitor mencegah derau frekuensi rendah
yang masuk ke penguat. Frekuesi potong (cut off frequency) rendah ditentukan oleh
Ci dan Ri dengan rumus
i i c
C R f
π 2
1
2.4.2.
Penguat Bukan Pembalik
2.4.2.1.
Penguat Bukan Pembalik DC
Konfigurasi penguat operasional lainnya yang penting adalah penguat bukan
pembalik [12]. Seperti pada rangkaian penguat pembalik, penguat bukan pembalik
tersusun atas sebuah pengatur tegangan sumber (Voltage-Controlled Voltage Source).
Dalam keadaan sesungguhnya, sebuah resistansi dihubungkan secara seri dengan
masukan bukan pembalik untuk meminimalkan efek dari arus prasikap. Rangkaian ini
tidak akan bekerja tanpa adanya resistansi.
Gambar 2.7 memperlihatkan sinyal masukan langsung masuk ke terminal
bukan pembalik. Perbedaan tegangan masukan akan didorong menjadi nol, sehingga
_ (2.8)
Gambar 2.7 Rangkaian penguat bukan pembalik [12].
Tegangan ini akan timbul pada resistansi Ri, sehingga arus ii ditentukan oleh
Karena tidak adanya arus yang masuk atau keluar dari terminal pembalik, arus harus
mengalir melalui resistansi Rf dari keluaran penguat operasional. Tegangan vf yang
timbul diantara Rf adalah
(2.10)
Tegangan vi sama dengan tegangan pada ground. Tegangan vf dan tegangan keluaran
vo merupakan suatu kalang tertutup. Jika Hukum Kirchhoff diterapkan, maka
1 (2.11)
Penguatan kalang tertutup ACL sama dengan
(2.12)
2.4.2.2.
Penguat Bukan Pembalik AC
Gambar 2.8 menunjukkan penguat bukan pembalik AC. Komponen Ci, Ri, dan
Rf mempunyai fungsi yang sama pada rangkaian penguat pembalik AC [11].
Frekuensi masukan pada terminal masukan bukan pembalik dapat mencapai 10 kali
lebih rendah daripada frekuensi masukan pada terminal pembalik. Penguatan AC
pada penguat bukan pembalik sama dengan penguatan DC. Impedansi masukan
kira-kira sama dengan Rg.
Gambar 2.9 Penguat bukan pembalik dengan catu daya tunggal [11].
Dalam penggunaan catu daya tunggal, seperti ditunjukkan pada Gambar 2.9,
kapasitor Ci berfungsi mencegah sinyal DC masuk, sehingga Ci dapat dianggap
sebagai hubungan terbuka. Pada penguatan DC, rangkaian di atas akan berfungsi
sebagai pengikut tegangan. Pada sinyal masukan AC, kapasitor Ci akan terhubung
singkat, sehingga penguatan AC sama dengan Av =1+ Rf Ri .
Resistror Rg berfungsi sebagai prasikap DC. Tegangan keluaran Vq akan sama
dengan setengah dari Vcc bila resistor Rg1 = Rg2. Penentuan nilai resistansi Rg tidak ada
2.4.2.3.
Konfigurasi Pengikut Tegangan
Pengikut tegangan merupakan salah satu bentuk dari penguatan bukan
pembalik [12]. Gambar rangkaian pengikut tegangan (voltage follower) ditunjukkan
oleh Gambar 2.10.
(a) (b)
Gambar 2.10 Rangkaian pengikut tegangan (voltage follower) [12].
Penguatan kalang tertutup dapat ditentukan dengan mempertimbangkan bahwa Rf = 0
dan Ri = ∞ dan hasilnya adalah
1 (2.13)
Penguatan tegangan sebesar satu kali, berarti tegangan keluaran “mengikuti”
tegangan masukan. Gambar 2.12b memperlihatkan adanya sebuah resistansi pada
terminal negatif sebagai umpan balik. Penguatan dari rangkaian ini sama dengan satu.
Karena tidak adanya arus yang masuk ke dalam terminal positif, maka impedansi
masukkan sama dengan tak terhingga.
Pengikut tegangan biasa digunakan untuk mengisolasi antara sumber dan
beban. Dengan adanya pengikut tegangan ini, sebuah sumber dengan arus yang kecil
2.5.
Penapis Aktif Elektronik
Penapis elektronika (filter) adalah suatu rangkaian yang menghasilkan
karakteristik respon frekuensi yang ditentukan, biasa digunakan untuk melewatkan
suatu frekuensi tertentu dan menolak yang lain [12]. Penapis terdiri atas dua jenis,
yaitu penapis aktif dan penapis pasif. Penapis aktif terdiri dari kombinasi resistansi,
kapasitansi dan suatu perangkat aktif, seperti penguat operasional. Penapis pasif
terdiri dari kombinasi resistansi, induktasi dan kapasitansi (RLC). Berdasarkan
karakteristiknya, penapis dibedakan menjadi dua, yaitu penapis lewat atas (HPF) dan
penapis lewat bawah (LPF).
Gambar 2.11 Penapis pasif HPF [12].
Gambar 2.12 Penapis pasif LPF [12].
Penapis pasif RLC akan menimbulkan suatu masalah bila bekerja pada batas
bawah dari rentang frekuensi audio. Masalah yang timbul adalah rugi-rugi internal
Kedua, ukuran fisik sebenarnya dari induktor yang besar membatasi pengunaanya.
Ketiga, harga dari induktor yang cukup mahal.
Penapis aktif menggunakan perangkat aktif untuk memberikan umpan balik.
Karena tidak ada induktansi, kesulitan pada respon frekuensi rendah dapat
dieliminasi. Penapis aktif RC dapat bekerja pada frekuensi yang sangat rendah dan
dapat mendekati penapis ideal. Penapis aktif juga memiliki beberapa keterbatasan.
Penapis aktif membutuhkan suatu catu daya untuk menjalankan penguat operasional.
Perangkat aktif memberikan suatu umpan balik, sehingga akan timbul kemungkinan
akan adanya ketidakstabilan. Keterbatasan lainnya yaitu frekuensi kerja maksimum
penapis lewat atas dibatasi oleh frekuensi kerja maksimum dari penguat operasional.
2.5.1.
Penapis Aktif Butterworth Pelewat Bawah
Bentuk dasar rangkaian ternormalisasi orde dua pelewat bawah Butterworth
ditunjukkan pada Gambar 2.13 dan orde tiga ditunjukkan pada Gambar 2.14.
Resistansi penapis dalam rancangan ternormalisasi dibuat 1Ω [12]. Kompensasi
resistor prasikap dapat ditentukan pada nilai yang optimum, kompensasi ini tidak
akan mempengaruhi karakteristik dari penapis. Pada rangkaian ini, penguat
operasional berfungsi sebagai pengikut tegangan.
Nilai kapasitansi untuk setiap orde penapis ditunjukkan pada Tabel 2.1.
berisi C1 dan C2 menunjukkan penapis dua kutub, sedangkan yang berisi C1, C2 dan
C3 menunjukkan penapis tiga kutub.
Gambar 2.13 Rangkaian LPF Butterworth orde 2 [12].
Beberapa kutub dapat terhubung sebagai rangkaian bertingkat secara kaskade
untuk mendapatkan penapis dengan jumlah kutub yang banyak, seperti ditunjukkan
pada Gambar 2.15. Secara teoritis, pada setiap tingkat terdapat voltage follower,
sehingga dimungkinkan untuk membuat penapis dengan tingkat yang diinginkan.
b d
2
a s Tabel 2.1 Data banyak akan diletakkan p2.5.2.
Kar
Resp amplitudo m seiring meni Nilai kapasia dari tabel
n dipasang
pada keluaran
Gam
rakteristik
pon amplitu
mendatar (ma
ingkatnya fre
itan untuk d
Kutub 2 1 3 3 4 1 2 5 1 3 6 1 1 3 7 1 1 4 sudah diatur pada masu n.
mbar 2.15 Ka
k Penapis B
udo Butterw aximally flat ekuensi. esain penapi C1 C2 ,414 0,70 ,546 1,39 ,082 0,92 ,613 0,38 ,753 1,35 ,235 0,30 ,035 0,96 ,414 0,70 ,863 0,25 ,531 1,33 ,604 0,62 ,493 0,22 r sedemikia
ukan dan jum
askade Butte
Butterwor
worth juga
t amplitude r
is aktif LPF
2 C3 071 92 0,2024 241 825 54 0,4214 089 66 071 588 36 0,4885 235 225 n, sehingga mlah kutub rworth orde
rth
disebut d
response) [1
Butterworth 4 4 5 jumlah kut yang lebih tinggi. dengan resp 12]. Respon
h orde tinggi
tub yang leb
h sedikit ak
Gambar 2.16 Karakteristik filter Butterworth [12].
2.5.3.
Perancangan Penapis Butterworth
Rangkaian aktif dalam penapis Butterworth menggunakan finite gain
realization, yaitu penguatan dari piranti aktif (penguat operasional) dibuat pada
tingkat tertentu yang relatif rendah dengan umpan balik [12]. Pada bagian ini
penguatan rangkaian akan ditentukan sebesar satu (unity) dengan konfigurasi
pengikut tegangan pada penguat operasional.
Semua rancangan akan diperlihatkan mempunyai frekuensi cut-off radian
yang ternormalisasi sebesar ωc = 1 rad/s. Nilai ini menunjukkan batas atas frekuensi
yang diloloskan (pass-band) dari penapis pelewat atas dan batas bawah frekuensi
yang diloloskan (pass-band) dari penapis pelewat bawah.
Rancangan penguatan satu didasarkan pada kombinasi dari orde dua dan orde
tiga. Setiap jumlah realisasi genap hanya akan menggunakan orde dua dan setiap
jumlah realisasi ganjil menggunakan orde tiga dan orde dua sebanyak yang
2.5.3.1.
Penskalaan Frekuensi
Perancangan penapis sesungguhnya membutuhkan banyak pertimbangan
rentang frekuensi dan tingkat impedansi [12]. Akibatnya sulit untuk menghitung
semua data untuk semua kemungkinan. Ketika formula khusus digunakan untuk
menentukan nilai elemen, nilai elemen menjadi sulit dan susah digunakan. Metode
yang digunakan untuk mengatasi masalah tersebut adalah perancangan yang
mendasarkan pada nilai elemen untuk rangkaian ternormalisasi. Rangkaian
ternormalisasi dibentuk berdasarkan penyederhanaan frekuensi tengah dan cutt-off
serta impedansi yang cocok. Nilai elemen biasanya 1Ω dan 1F. Nilai tersebut tampak
tidak realistis, namun sangat berguna sebagai bentuk dasar rancangan yang
sebenarnya dapat dibangun.
Pengubahan dari rancangan ternormalisasi menjadi sebuah rancangan yang
sesungguhnya dapat dilakukan dengan dua operasi penskalaan yaitu penskalaan
frekuensi dan penskalaan impedansi. Penskalaan frekuensi digunakan untuk
mengubah frekuensi dari rancangan ternormalisasi ke frekuensi yang dibutuhkan dari
rancangan sesungguhnya. Penskalaan impedansi digunakan untuk mengubah nilai
elemen menjadi nilai aktual.
Frekuensi referensi adalah fr dalam penapis sesunguhnya dan ωr dalam
rancangan ternormalisasi. Bila ωr =2πfr yang merepresentasikan fr frekuensi dalam
radian, maka konstanta penskalaan Kf ditentukan oleh
r r r
r f
f K
ω π ω
ω 2
=
Setelah nilai konstanta penskalaan frekuensi diketahui, nilai R/C diubah dengan
faktor Kf. Jika frekuensi pada rancangan lebih tinggi, maka R/C dibagi dengan Kf.
Secara praktis yang paling sering diubah adalah C.
2.5.3.2.
Penskalaan Impedansi
Konstanta penskalaan impedansi Kr ditentukan oleh:
sasi ternormali
aktual r
R R
K = (2.15)
Nilai Kr dapat ditentukan paling akhir, mengingat ketersediaan nilai komponen
dipasaran. Rangkaian yang mempunyai impedansi tinggi akan mempunyai nilai
resistansi yang tinggi dan nilai kapasitans yang rendah, begitu juga sebaliknya.
2.5.4.
Jumlah Kutub
Jumlah dari kutub adalah jumlah dari elemen reaktif dari rangkaian penapis.
Jumlah dari kutub juga menunjukkan jumlah dari kapasitor (tidak termasuk kapasitor
eksternal dari jaringan penapis). Secara umum, performa yang dihasilkan akan
semakin mendekati ideal seiring dengan bertambahnya jumlah kutub. Pada penapis
orde tinggi mempunyai respon frekuensi yang diloloskan mendatar serta respon dari
2.5.5.
Tanggapan Frekuensi Butterworth Pelewat Rendah
Fungsi dari Butterworth akan memberikan frekuensi referensi pada tanggapan
amplitudo sebesar 1
√2 dari tingkat frekuensi yang diloloskan maksimum. Bila fc
menunjukkan frekuensi cut-off, f adalah nilai frekuensi, dan n adalah jumlah kutub,
maka respon amplitudo dari pelewat bawah Butterworth
(2.16)
Nilai maksimum dari M(ω) terjadi pada saat f=0, sehingga M(0)=1. Penapis aktif
mempunyai nilai M(ω) lebih dari satu.
Bila MdB(ω) menunjukkan nilai respon maksimum relatif dalam desibel, maka
⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + = n c dB f f M 2 10 1 1 log 20 )
(ω (2.17)
atau
(
)
[
n]
c
dB f f
M (ω)=−10log101+ 2 (2.18)
2.5.6.
Kurva Tanggapan Frekuensi
Gambar tanggapan amplitudo untuk penapis Butterworth orde 2 sampai 7
ditunjukkan pada Gambar 2.17. Semua kurva dimulai dari tingkat -3 dB dan .
p f t
2
p p p Freku pelewat ren frekuensi ter ternormalisa2.5.7.
Pera
Tun
Pada prasikap DC prasikap DC penapis tidak uensi ternorndah dan p
rnormalisasi
asi sama den
Gambar
ancangan
nggal
a penggunaa
C dan sebu
C adalah set
k terpotong.
rmalisasi pad
enapis pele
i sama denga
ngan fc/f.
r 2.17 Tangg
Penapis
an catu day
uah penyang
tengah dari
da absis dig
ewat atas. P
an f/fc. Penap
gapan frekue
s Dengan
ya tunggal
gga tegangan
Vcc. Hal in
gunakan seca Penapis pel pis pelewat ensi Butterw
n Menggu
dapat ditamn [13]. Bes
ni dimaksudk
ara berbeda
ewat rendah
atas mempu
worth [12].
unakan C
Pada Gambar 2.18, kapasitor Ci berfungsi untuk menolak sinyal DC dari
sinyal masukan. Vq diperoleh dari pembagi tegangan Vcc oleh Rg. Penguat operasional
berfungsi sebagai pengikut tegangan dan penyesuai impedansi.
Gambar 2.18 Rangkaian Penapis Butterworth dengan catu daya tunggal [13].
Rangkaian paralel Rg dan Ci membentuk suatu penapis pelewat atas.
Frekuensi cut-off pelewat atas harus lebih kecil daripada frekuensi cut-off penapis
lewat bawah. Penggunaan pengikut tegangan pada masukan penapis pelewat bawah
membuat tidak terjadinya efek pembebanan. Dalam penapis orde tinggi, setiap tingkat
2.6.
Penguat Transistor Konfigurasi Umpan Balik Tegangan
Kolektor
2.6.1.
Analisa DC
Arus prasikap
Q
C
I dan tegangan kerja
Q
CE
V merupakan sebuah fungsi dari
sebuah penguatan arus transistor. Karena beta (β) dipengaruhi oleh perubahan suhu,
nilai beta sesungguhnya tidak dapat ditentukan. Pada realisasi, akan menjadi sangat
sulit untuk membuat suatu rangkaian yang tidak tergantung oleh beta. Bila parameter
rangkaian dipilih dengan baik, maka akan menghasilkan nilai
Q
C
I dan
Q
CE
V yang
hampir sepenuhnya tidak tergantung oleh beta. Titik kerja transistor ditentukan oleh
sebuah nilai tetap dari
Q
C
I dan
Q
CE
V . Nilai dari
Q
B
I akan berubah seiring perubahan
beta, tetapi karakteristik ditentukan oleh
Q
C
I dan
Q
CE
V [14].
Tingkat stabilitas dapat ditingkatkan dengan menggunakan sebuah umpan
balik dari kolektor ke basis seperti ditunjukkan pada Gambar 2.19. Analisa akan
dibagi menjadi dua, yaitu kalang basis-emitor dan kemudian hasilnya digunakan
untuk kalang kolektor-emitor. Gambar 2.20 menunjukkan kalang basis-emitor untuk
Gambar 2.19 Konfigurasi tegangan umpan balik [14].
Gambar 2.20 Kalang basis-emitor untuk jaringan dari Gambar 2.19 [14].
Dengan menerapkan hukum Kirchhoff pada kalang Gambar 2.20 searah jarum jam
akan menghasilkan
0
' − − − =
− C C B B BE E E
CC I R I R V I R
V
(2.19)
Arus yang melalui RC bukanlah arus IC, namun arus I’C (I’C=IC+IB). Nilai dari IC dan
mensubtitusi nilai IC ≅I'C=βIBdan IC ≅IE pada persamaan 2.19, akan menghasilkan 0 = − − −
− B C B B BE B E
CC I R I R V I R
V β β
(2.20)
Nilai IB
)
( C E
B BE CC B R R R V V I + + − =
β (2.21)
Umpan balik menghasilkan refleksi dari resistansi RC kembali ke rangkaian masukan.
Secara umum persamaan IB
' ' R R V I B B β + = (2.22)
Tidak adanya R’ dalam konfigurasi prasikap tetap, R’=RE untuk prasikap emitor
(dengan (β+1)≅β ) dan R’≈RC+RE untuk umpan balik kolektor. Karena IC =βIB,
sehingga ' ' R R V I B
CQ β
β
+ =
(2.23)
Nilai dari βR' jauh lebih besar daripada nilai RB, sehingga sensitivitas dari ICQ
berkurang terhadap variasi beta. Bila ′ dan ′ ′, maka
' ' ' ' ' ' R V R V R R V I B
CQ ≅ =
Kalang kolektor-emitor untuk jaringan pada Gambar 2.19 ditunjukkan oleh Gambar
2.21.
Gambar 2.21 Kalang kolektor-emitor untuk Gambar 2.19 [14].
Dengan menerapkan hukum tegangan Kirchhoff pada kalang Gambar 2.21 dengan
arah berlawanan jarum jam, akan menghasilkan
0
' − =
+
+ CE C C CC
E
ER V I R V
I
(2.25)
Karena I'C≅ IC dan IE ≅IC, maka
)
( E C
C CC
CE V I R R
V = − +
2.6.2.
Analisa AC
Gambar 2.22 Konfigurasi umpan balik kolektor.
Penggambaran kembali Gambar 2.22 dengan pemodelan rangkaian re
menghasilkan konfigurasi seperti pada Gambar 2.23.
Gambar 2.23 Pendekatan model re konfigurasi umpan balik kolektor [14].
Penguatan tegangan (Av) pada titik C dari Gambar 2.23
e C i
o v
r R V V A = =−
(2.27)
Dengan re merupakan resistansi dinamis dari transistor
E e
I mV
Tanda negatif pada persamaan 2.27 menunjukkan perbedaan fasa sebesar 180° antara
masukan dan keluaran.
2.7.
Penguat Daya
Merupakan suatu penguat yang menerima suatu sinyal masukan dan
menyediakan keluaran yang besar untuk perangkat keluaran atau ke penguat lainnya
[14]. Sebuah sumber sinyal biasanya menghasilkan sinyal yang kecil dan
membutuhkan penguatan untuk dapat mengoperasikan peralatan keluaran. Dalam
penguatan sinyal kecil faktor utama dalam penguatan adalah linearitas dan magnitudo
dari penguatan. Pengaturan daya dan efisiensi menjadi hal yang penting karena arus
dan tegangan masukan yang kecil dalam penguatan sinyal kecil. Penguat tegangan
menyediakan penguatan tegangan untuk memperbesar sinyal masukan. Sinyal besar
menyediakan daya yang cukup ke sebuah beban keluaran untuk mengendalikan
speaker yang biasanya mulai dari beberapa watt hingga puluhan watt.
Salah satu metode yang digunakan untuk mengklasifikasikan penguat adalah
dengan penggunaan kelas. Pada dasarnya, kelas menggambarkan jumlah dari variasi
sinyal keluaran yang beroperasi lebih dari satu siklus untuk sebuah siklus penuh.
Kelas A mempunyai sinyal keluaran bervariasi untuk siklus penuh 360°.
Penguat kelas ini memerlukan prasikap pada titik kerja, sehingga paling sedikit
setengah dari ayunan sinyal keluaran dapat bervariasi naik dan turun yang dibatasi
Kelas B menyediakan sebuah sinyal keluaran yang bervariasi lebih dari
setengah sinyal masukan atau sinyal 180°. Titik prasikap dc terletak pada tegangan 0
V, dimana keluaran bervariasi dari titik prasikap hingga setengah siklus.
Kelas AB merupakan penguat yang dapat diberi prasikap DC diatas nol. Arus
basis diperoleh dari penguat kelas B dan tegangan satu setengah kali lebih tinggi dari
catu daya kelas A. Kelas AB membutuhkan sebuah hubungan dorong-tarik (
push-pull) untuk menghasilkan siklus keluaran yang penuh. Prasikap DC diberikan
mendekati nol pada arus basis untuk menghasilkan efisiensi yang lebih baik. Untuk
operasi kelas AB, ayunan sinyal keluaran timbul antara 180° sampai 360°.
Kelas C memiliki sinyal keluaran untuk operasi kurang dari 180°. Penguta
kelas ini akan beroperasi hanya dengan rangkaian penala yang menyediakan sebuah
siklus penuh dari operasi untuk penalaan atau frekuensi resonansi.
Kelas D merupakan penguat yang beroperasi menggunakan sinyal digital yang
aktif untuk interval waktu yang pendek dan mati untuk waktu yang lebih lama.
2.8.
Mikrokontroler ATmega32
Mikrokontroler merupakan suatu chip yang dirancang dan digunakan untuk
keperluan khusus. Mikrokontroler tersusun atas ALU, ROM, RAM serta masukan
dan keluaran yang terintegrasi menjadi satu. Mikrokontroler ATmega32 merupakan
mikrokontroler CMOS (Complementary Metal Okside Semiconductor) 8-bit yang
ini bekerja mengesekusi perintah dalam satu kali detak. Mikrokontroler Atmega32 ini
cocok untuk bagi para perancang alat-alat yang membutuhkan kecepatan proses yang
tinggi dan daya yang rendah [15].
Fitur-fitur yang disediakan oleh ATmega32, yaitu:
• In-System Self-Programmable Flash sebesar 32KB, mempunyai masa pakai
hingga 100.000 kali baca tulis.
• 32 x 8 register kerja umum.
• EEPROM sebesar 1024 byte.
• SRAM internal sebesar 2KB.
• Pewaktu atau pencacah 8 bit sebanyak dua buah dan 16 bit satu buah.
• 8 kanal, 10 bit ADC.
• Serial USART yang terprogram.
• 32 bit masukan atau keluaran yang dapat diprogram.
2.8.1.
Pengubah Analog ke Digital
Pengubah analog ke digital atau ADC adalah suatu alat yang berfungsi untuk
mengubah sinyal analog kontinyu menjadi sinyal diskret digital. Kebalikan dari ADC
adalah DAC (digital to analog converter)[12]. Tingkat ketelitian dari ADC disebut
dengan resolusi. Resolusi dinyatakan dengan bit, sehingga pada skala penuh tegangan
ADC dengan resolusi 10 bit terdapat 210(=1024) tingkat kuantisasi . Perubahan nilai
setiap tingkat kuantisasi sebesar
(2.29)
dengan
Q adalah resolusi (Volt),
Vfs adalah tegangan masukan pada skala penuh, dan
n adalah resolusi ADC.
Fungsi resolusi konverter dibatasi oleh rasio sinyal dan derau (SNR). Bila
terlalu banyak derau yang timbul pada masukan analog, maka akurasi akan menurun
karena keterbatasan resolusi.
2.8.1.1.
Algoritma SAR
Ada berbagai metode untuk mengubah sinyal analog menjadi sinyal diskret
digital, salah satunya adalah SAR (Succesive Approximation ADC) [16]. SAR ini
mengubah sinyal analog kontinyu menjadi diskret digital melalui pencarian nilai
biner pada semua kemungkinan tingkat kuantisasi sebelum akhirnya memusat pada
sebuah keluaran digital untuk setiap ubahan.
Pada rangkaian SAR, biasanya terdiri dari empat bagian mendasar, yaitu:
i. Sebuah rangkaian cuplik dan tahan (sample and hold) untuk memperoleh nilai
m d y ii. Sebu masu masu regis iii. Rang pend iv. Sebu dari k Perk membutuhka detak harus yang diingin uah pemban
ukan (Vin) de
uk ke sebua
ster).
gkaian SAR
dekatan kode
uah DAC int
kode digital
iraan yang
an satu deta
sama denga nkan. nding tegan engan sebua ah register R dirancang
e digital dari
ternal acuan
keluaran SA
g dilakukan
ak untuk set
an frekuensi
Gambar 2.
ngan analog
ah keluaran D
perkiraan b
g untuk da
Vin ke DAC
menyediaka
AR dalam pe
n bersifat
tiap bit dari
pencuplikan
.24 Algoritm
g untuk m
DAC. Hasil
berurutan (s
apat memb
C internal.
an sebuah te
erbandingan
berturut –
i resolusi ya
n dikalikan d
ma SAR [16]
membandingk
keluaran dar
successive a
berikan mas
egangan anal
dengan Vin.
turut. Pro ang diingink dengan juml . kan tegang ri pembandi approximati sukan sebu
log yang sam
oses konve
kan. Frekuen
2.8.1.2.
ADC Pada Mikrokontroler ATmega32
Salah satu fitur yang disediakan oleh ATmega32 adalah ADC SAR 10 bit.
ADC ini terhubung dalam 8 kanal analog multiplexer yang mengijinkan tegangan
masukan tersendiri (single-ended) dari pin-pin pada port A. Piranti ini juga
mendukung 16 kombinasi tegangan masukan yang berbeda. Piranti ini memiliki pin
catu analog yang terpisah, AVCC. Tegangan referensi internal yang bernilai 2,56 V
disediakan di dalam chip.
Cara kerja dari ADC ini adalah mengubah sebuah tegangan masukan analog
menjadi 10 bit nilai digital melalui pendekatan berurutan. Nilai minimum
direpresentasikan sebagai GND dan nilai maksimum direpresentasikan sebagai
tegangan dari AREF dikurangi 1 digit terendah (LSB). AVCC atau tegangan referensi
internal dapat dihubungkan dengan AREF dengan menuliskan ke bit REFSn pada
register ADMUX.
Kanal masukan analog dan penguatan beda dipilih dengan menuliskan bit
MUX pada ADMUX. ADC diaktifkan dengan mengendalikan bit ADC Enable,
ADEN pada ADCSRA. Tegangan referensi dan pemilihan kanal masukan tidak akan
bekerja hingga ADEN diaktifkan. ADC menghasilkan hasil 10-bit yang ditunjukkan
pada register data ADC, ADCH dan ADCL. Pada kondisi awal, hasilnya ditujukan
pada pengaturan kanan. Bila hasilnya diatur pada kiri dan tidak dibutuhkan
dibaca, akses terhadap register data ADC akan ditutup. Hal ini berarti bahwa bila
ADCL sudah dibaca, pengkonversian selesai sebelum ADCH dibaca.
Rangkaian SAR memerlukan sebuah masukan detak dengan frekuensi antara
50 kHz hinggga 200 kHz untuk mendapatkan resolusi maksimum. Bila resolusi yang
lebih rendah dari 10 bit, maka frekuensi detak masukkan dapat lebih tinggi dari 200
kHz untuk mendapatkan cuplikan yang lebih tinggi.
Modul ADC ini mempunyai penskalaan frekuensi yang menghasilkan sebuah
frekuensi detak. Penskalaan diatur oleh bit ADPS pada ADCSRA. Penskala mulai
menghitung dari saat ADC diaktifkan oleh pengaturan bit ADEN pada ADCSRA.
Penskala akan tetap berjalan selama bit ADEN diaktifkan dan akan reset ketika
ADEN rendah.
Ketika memulai konversi tunggal, konversi dimulai dengan mengikuti
kenaikan tepi dari siklus detak ADC. Konversi normal membutuhkan 13 siklus detak
ADC. Konversi pertama setelah ADC dihidupkan membutuhkan 25 siklus detak
ADC untuk memulai rangkaian analognya. Ketika ADC selesai mengkonversi,
hasilnya akan ditulis pada register data ADC, dan ADIF aktif. Pada mode konversi
tunggal, ADSC dihapus secara simultan.
2.8.2.
Pewaktu 8 Bit
Pewaktu atau pencacah (TCNT0) dan register pembanding keluran (OCR0)
register bendera interupsi pewaktu (TIFR). Semua interupsi merupakan interupsi
individu yang bernaung pada register interupsi muka pewaktu (TIMSK).
Pewaktu atau pencacah dapat di detakkan sendiri melalui penskala atau oleh
sebuah sumber detak eksternal pada pin T0. Blok logika pemilih detak mengatur
sumber detak dan tepi dari pewaktu atau pencacah yang digunakan untuk menaikkan
atau menurunkan nilai pewaktu atau pencacah tersebut. Pewaktu atau pencacah tidak
akan aktif bila tidak ada sumber detak yang dipilih. Keluaran dari logika pemilih
detak berkenaan dengan detakan pewaktu (clkT0). Sumber dari detak dipilih oleh
logika pemilih detakan yang dikendalikan oleh bit pemilih detakan (CS02:0) yang
berlokasi pada register pengendali pewaktu atau pencacah (TCCR0).
Dua buah penyangga register pembanding keluaran (OCR0) membandingkan
dengan nilai dari pewaktu atau pencacah pada semua waktu. Hasil dari pembandingan
dapat digunakan sebagai pembangkit gelombang untuk menghasilkan sebuah
modulasi lebar pulsa (PWM) atau keluaran frekuensi variabel pada pin pembanding
keluaran (OC0). Bila pada saat perbandingan hasilnya sama, maka akan
mengaktifkan bendera pembanding (OCF0) yang dapat digunakan untuk membuat
suatu permintaan interupsi pembanding keluaran.
2.8.3 . UART
Universal Asynchronous Receiver Transmitter adalah suatu tipe dari pengirim
mengubah byte data dari dan atau menjadi aliran data mulai-berhenti (start-stop)
asinkron. Cara kerja UART adalah dengan mengirimkan start bit, data bit yang terdiri
dari 5 – 8 bit, LSB pertama, sebuah bit paritas yang sifatnya opsional, kemudian satu,
satu setengah atau dua stop bit. Start bit mempunyai polarisasi yang berlawanan
dengan kondisi jalur tenang. Stop bit mempunyai polarisasi yang sama dengan
keadaan jalur pada saat tenang. Stop bit menyediakan suatu tunda sebelum karakter
selanjutnya dimulai.
UART mempunyai kemampuan untuk menerima atau mengirim serial data
menggunakan kecepatan bit (baud rate) yang berbeda. Kecepatan dari UART
didefinisikan oleh bit per detik atau bps. Kecepatan standarnya yaitu 110, 300, 1200,
2400, 4800, 9600, 14400, 19200, 28800, 38400, 57600, 76800, 115200, 230400,
460800, 921600, 1382400, 1843200 dan 2764800 bit/s.
2.8.3.1. USART
Tiga bagian utama dari USART yaitu pembangkit detak, pengirim dan
penerima. Register pengendali dipakai bersama oleh semua unit. Pembangkit logika
detakan dari logika sinkronisasi untuk masukan detak eksternal digunakan oleh
operasi sinkronisasi kedua dan pembangkit baud rate. Pin transfer detak (XCK)
hanya digunakan oleh mode transfer sinkron. Pengirim terdiri dari sebuah penyangga
penulis, sebuah register geser serial, pembangkit paritas dan logika kontrol untuk
pengiriman data kontinyu tanpa ada tunda diantara bingkai. Penerima merupakan
bagian yang paling komplek dari modul USART berkenaan dengan detakan dan unit
pemulihan data. Unit pemulihan data berfungsi untuk penerimaan data asinkron.
Penerima terdiri atas pengecek paritas, logika kontrol, sebuah register penggeser dan
dua tingkat penyangga penerima (UDR). Penerima juga mendukung format bingkai
yang sama seperti pada pengirim dan dapat mendeteksi kesalahan bingkai, data yang
berlebihan dan kesalahan paritas.
USART kompatibel dengan UART termasuk lokasi bit di dalam semua
register USART, pembangkit baud rate, operasi pengiriman, penyangga pengiriman
dan operasi penerima. Register penyangga kedua yang ditambahkan. Bekerja sebagai
sebuah penyangga edaran FIFO. UDR harus dibaca sekali untuk setiap data yang
datang. Bendera kesalahan (FE dan DOR) dan bit data kesembilan (RXB8) disangga
oleh data yang berada didalam penyangga penerima. Status bit harus selalu dibaca
sebelum register UDR dibaca. Status kesalahan akan hilang ketika kondisi penyangga
hilang.
Register geser penerima dapat bertindak sebagai penyangga tingkat ketiga. Ini
dilakukan dengan mengijinkan penerimaan data untuk menunggu di dalam register
geser serial bila register penyangga penuh, hingga sebuah bit mulai terdeteksi.
USART lebih tahan terhadap kondisi kesalahan data berlebih (DOR).
Pembangkitan detak logika menghasilkan detak dasar untuk pengirim dan
penerima. USART mendukung empat mode operasi detakan : normal asinkron,
dalam register status dan kontrol USART C (UCSRC) memilih diantara mode operasi
sinkron dan asinkron. Kecepatan ganda (hanya mode asinkron) di kendalikan oleh
U2X di dalam register UCSRA. Ketika menggunakan mode sinkron (UMSEL=1),
register penunjuk data untuk untuk mengendalikan pin XCK (DDR_XCK) walaupun
sumber detak internal (mode pertama) atau eksternal (mode kedua). Pin XCK hanya
aktif ketika menggunakan mode sinkron.
Pembangkitan detak internal digunakan untuk mode operasi asinkron dan
sinkron pertama serta kedua. Register baud rate USART (UBRR) dan pencacah turun
terhubung sebagai penskala terprogram atau pembangkit baud rate. Pencacah turun
bekerja pada detak sistem, dibebani dengan nilai UBRR setiap kali pencacah telah
mencacah hingga nol atau ketika register UBRR ditulis. Sebuah detakan dibangkitkan
setiap kali pencacah mencapai nol. Detak ini adalah pembangkit detak keluaran baud
rate ( = fosc (UBRR+1)). Pengirim membagi pembangkit baud rate keluaran oleh
2,8 atau 16, tergantung dari mode yang digunakan. Pembangkit keluaran baud rate
digunakan secara langsung oleh detak penerima dan unit pemulihan data. Perhitungan
nilai baud rate dan UBRR disajikan pada Tabel 2.2.
Tabel 2.2 Tabel perhitungan Baud rate dan UBRR
Mode Operasi Perhitungan Baud rate Perhitungan UBRR
Asinkron Normal
(U2X = 0) 16( +1)
=
UBRR f
BAUD osc 1
16 −
=
BAUD f
UBRR osc
Asinkron kecepatan ganda
(U2X = 1) 8( +1)
=
UBRR f
BAUD osc 1
8 −
=
BAUD f
2
p m y y d m p Mod Sinkron per2.9.
Liqu
Pena pada Gamba mengandung yang menga yang meman Setia diantara dua mendatar da penapis penTabel 2.2 (l
e Operasi
rtama
uid Crysta
ampil kristal
ar 2.25. LC
g elektroda i
andung elek
ntulkan caha
ap piksel dar
a buah elekt
ari tiap pikse
ngkutuban m
lanjutan) Tab
Perh
BAUD
al Display
Gambar 2.
l cair adalah
CD tersusun
indium tima
ktroda (no.4
aya (no.6) [1
ri LCD terdi
trode transpa
el tegak luru
menyebabkan
bel perhitung
hitungan Ba
( 2 = UBRR f UD osc
y (LCD) 16
25 Lapisan p
h sebuah ala
atas lapisan
ah oksida, (n
), lapisan p
8].
iri dari sebua
aran dan du
us satu sama
n cahaya ak
gan Baud ra
aud rate ) 1 + R c U
6 x 2 Kara
penyusun LC
at penampil
n penapis v
no.2), kristal
penapis hori
ah lapisan d
ua buah pena
a lain. Tidak
kan melewa
ate dan UBR
Perhitunga 2 = BA f UBRR
akter
CD [18].l tipis seper
vertikal (no.
l cair nemati
izontal (no.5
dari molekul
apis pengku
k adanya kris
ati penapis RR an UBRR 1 − AUD fosc rti ditunjukk
1), kaca ya
ik (no.3), ka
5), permuka
yang tersus
utuban. Bida
stal cair anta
dihentikan oleh pengkutuban kedua. Permukaan dari elektroda yang bersentuhan
dengan kristal cair diperlakukan secara khusus supaya molekul kristal cair dalam arah
tertentu. Ketika sebuah tegangan diberikan di antara elektroda, sebuah gaya bekerja
untuk mengatur molekul kristal cair sejajar dengan medan listrik. Ini akan
mengurangi rotasi dari pengkutuban cahaya yang masuk, sehingga piranti berwarna
abu-abu. Bila tegangan masukannya terlalu besar, molekul kristal cair pada layar
tengah hampir sepenuhnya tidak berputar dan pengkutuban dari cahaya tidak
berputar, melainkan menembus lapisan kristal cair. Cahaya ini akan terpolarisasi
tegak lurus pada penapis kedua, sehingga piksel berwarna hitam.
2.9.1.
Pengendali Modul LCD
Modul LCD seperti ditunjukkan pada Gambar 2.26, mempunyai pengendali
tampilan alpha numerik, karakter kana jepang, dan simbol. Pengunaan LCD dot
matrik dapat diatur untuk penggunaan dengan antar muka 4 bit atau 8 bit. Semua
fungsi yang tesedia seperti RAM tampilan, pembuat karakter, serta pengendali kristal
cair yang digunakan dalam pengendalian LCD dot matrix sudah terintegrasi menjadi
2
p
Desk
2.3. Daftar i
pada Tabel 2
Instruksi R
NOP 0 Hapus Layar 0
Gam kripsi fungsi instruksi pen 2.4. dijelaska Tabe Pin No 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 Tabe
RS RW D7
0 0 0
0 0 0
mbar 2.26 LD
dari tiap pin
ngatur modu
an pada Tab
el 2.3 Ketera
o Nama Vss Vdd Vee RS R/W E D0 D1 D2 D3 D4 D5 D6 D7 A K
l 2.4 Daftar
D6 D5 D4
0 0 0
0 0 0
DC Dot Matr
n LCD pada
ul LCD ditun
bel 2.5. angan fungsi Fungsi Catu daya Catu daya Pengatur kontras Perintah Perintah Perintah I/O I/O I/O I/O I/O I/O I/O I/O Anoda Katoda instruksi ko
D3 D2 D
0 0
0 0
rix 16 x 2 ka
a Gambar 2.2
njukkan oleh
i dari tiap pin
Deskri
GND + 5 V
![Gambar 2.4 Mikrofon kondenser elektret [9].](https://thumb-ap.123doks.com/thumbv2/123dok/1648193.2069931/33.612.232.402.423.552/gambar-mikrofon-kondenser-elektret.webp)
![Gambar 2.5 Rangkaian penguat pembalik [12].](https://thumb-ap.123doks.com/thumbv2/123dok/1648193.2069931/36.612.223.419.315.491/gambar-rangkaian-penguat-pembalik.webp)
![Gambar 2.8 Penguat bukan pembalik [11].](https://thumb-ap.123doks.com/thumbv2/123dok/1648193.2069931/39.612.232.415.510.626/gambar-penguat-bukan-pembalik.webp)
![Gambar 2.9 Penguat bukan pembalik dengan catu daya tunggal [11].](https://thumb-ap.123doks.com/thumbv2/123dok/1648193.2069931/40.612.237.407.223.387/gambar-penguat-pembalik-catu-daya-tunggal.webp)
![Gambar 2.14 Rangkaian LPF Butterworth orde 3 [12].](https://thumb-ap.123doks.com/thumbv2/123dok/1648193.2069931/44.612.232.410.172.334/gambar-rangkaian-lpf-butterworth-orde.webp)
![Gambar 2.20 Kalang basis-emitor untuk jaringan dari Gambar 2.19 [14].](https://thumb-ap.123doks.com/thumbv2/123dok/1648193.2069931/53.612.226.417.113.269/gambar-kalang-basis-emitor-untuk-jaringan-dari-gambar.webp)
![Gambar 2.21 Kalang kolektor-emitor untuk Gambar 2.19 [14].](https://thumb-ap.123doks.com/thumbv2/123dok/1648193.2069931/55.612.257.382.171.314/gambar-kalang-kolektor-emitor-untuk-gambar.webp)

