-56- copyright @ DTE FT USU
Perancangan Prototipe Anemometer Berbasis Gelombang Suara
Ultrasonik Frekuensi Rendah
Jackson Van Bowles Manurung, Ir. T. Ahri Bahriun, M.Sc
Konsentrasi Teknik Komputer, Departemen Teknik Elektro Fakultas Teknik Universitas Sumatera Utara (USU) Jl. Almamater, Kampus USU Medan 20155 INDONESIA
e-mail: [email protected]
Abstrak
Anemometer merupakan sebuah instrumen yang digunakan untuk mengetahui kecepatan pergerakan udara. Umumnya sebuah anemometer mengukur kecepatan pergerakan udara dengan mengukur rasio kecepatan putar poros pada baling-baling yang berinteraksi langsung terhadap udara yang bergerak. Momen inersia serta pengaruh mometum poros dan baling-baling akan menjadi isu utama saat pembahasan mengenai akurasi hasil pengukuran. Tulisan ini membahas tentang perancangan instrumen tersebut dengan menggunakan prisnsip dasar perambatan gelombang mekanis yang pada pembahasan ini adalah gelombang ultrasonik dan diharapkan dapat menjadi salah satu solusi untuk mengatasi isu momen inersia dan pengaruh momentum tersebut. Secara fisika, pergerakan udara sebagai media perambatan dapat mempengaruhi cepat rambat gelombang ultrasonik sehingga dengan mengamati perubahan cepat rambat gelombang ultrasonik, dapat diketahui kecepatan pergerakan udara tersebut. Perangkat yang digunakan pada perancangan ini adalah transduser ultrasonik, penguat sinyal dan sistem mikrokontroler ATmega32.
Kata kunci : Gelombang ultrasonik, Cepat rambat gelombang, Mikrokontroler ATmega32
1. Pendahuluan
Anemometer yang umum digunakan sebagai perangkat pengukur kecepatan udara bergerak, menggunakan putaran pada poros baling-baling sebagai indikitaror terjadinya interaksi antara sayap baling-baling dengan udara yang bergerak dan kecepatan putar poros tersebut sebagai rasio terhadap kecepatan pergerakan udara.
Kecepatan pergerakan udara dapat berubah dengan sangat drastis sehingga dengan menggunakan metode tersebut akan menimbulkan isu terhadap akurasi pengukuran kecepatan pergerakan udara. Mengingat poros baling dan baling-baling itu sendiri memiliki massa dan gaya gesekan terhadap bidang tumpuannya maka akan menimbulkan masalah saat momentum yang dihasilkan oleh pergerakan udara belum cukup mampu mengimbangi massa dan momen inersia baling-baling tersebut.
Salah satu solusi yang dapat digunakan adalah dengan menggunakan gelombang mekanis untuk mengukur kecepatan pergerakan udara, karena gelombang mekanis tidak memiliki massa sehingga tidak dipengaruhi oleh isu momen inersia dan momentum udara. Selain itu kecepatan rambat gelombang mekanis relatif konstan terhadap kondisi fisis media rambat yang stabil atau tidak memiliki percepatan.
Gelombang ultrasonik adalah salah satu pengelompokan gelombang mekanis yang dibangkitkan dengan meresonansikan materi padat pada frekuensi diatas 20kHz (batas ambang atas indra pendengaran manusia). Secara alami pembangkitan gelombang pada frekuensi ini sangat sukar ditemui selain oleh beberapa makhluk hidup dengan penggunaan navigasi dan komunikasi.
Penggunaan gelombang pada frekuensi ini akan sangat tepat pada aplikasi
anemometer untuk mengurangi
kemungkinan terjadinya interferensi gelombang pada frekuensi yang sama dan juga terjadinya derau oleh gelombang dengan frekuensi yang berdekatan.
2. Anemometer Ultrasonik
Perambatan gelombang mekanis sangat dipengaruhi oleh media perambatannya [1]. Perubahan keadaan fisis media perambantan akan berpengaruh terhadap kecepatan rambat gelombang, daya gelombang saat merambat dan jarak yang dapat ditempuh. Seperti halnya yang terjadi pada gelombang ultrasonik saat merambat melalui media perambatan fluida baik material gas ataupun materian cair, perubahan tekanan, suhu dan komposisi material yang terkadung didalamnya akan sangat mempengaruhi kecepatan rambat gelombang tersebut.
-57- copyright @ DTE FT USU Kondisi tersebut dapat dimanfaatkan
yaitu dengan mengamati perubahan kecepatan rambat gelombang ultrasonik untuk dapat mengetahui perubahan fisis yang terjadi pada media perambatannya tersebut. Seperti contoh, kecepatan rambat gelombang ultrasonik akan semakin besar ketika tekanan atau suhu atau kelembaban meningkat pada udara. Perubahan kecepatan rambat gelombang ultrasonik juga dapat terjadi jika udara tersebut bergerak relatif terhadap arah perambatan ultrasonik tersebut.
Dengan menggunakan perumusan masalah secara matematika, perubahan kecepatan rambat gelombang ultrasonik pada udara yang dipengaruhi kondisi fisis medianya tersebut dapat diabaikan sehingga perubahan kecepatan pergerakan udara dapat diperoleh dengan mengetahui perubahan kecepatan rambat gelombang pada udara.
Terdapat dua cara untuk mengetahui perubahan kecepatan rambat ultrasonik pada udara. Cara pertama adalah dengan mengukur jarak yang dapat ditempuh oleh gelombang tersebut pada satuan waktu yang telah ditentukan dan cara kedua adalah dengan mengukur waktu tempuh yang dibutuhkan oleh ultrasonik untuk dapat merambat pada jarak tertentu. Kedua cara tersebut adalah tepat secara teori namun memiliki perbedaan yang sangat besar jika diaplikasikan secara nyata, karena pada praktiknya akan lebih mudah untuk mengukur waktu rambat jika dibandingkan dengan mengukur jarak tempuh ultrasonik tersebut.
Seperti yang telah dijelaskan sebelumnya bahwa dengan mengetahui perubahan kecepatan rambat gelombang ultrasonik pada udara yang juga dipengaruhi oleh perubahan kecepatan pergerakan medianya tersebut, dapat diketahui kecepatan pergerakan udara itu tanpa dipengaruhi oleh perubahan sifat fisis lainnya yang terjadi pada udara tersebut.
Jika kecepatan rambat gelombang pada udara dilambangkan dengan , kecepatan pergerakan udara adalah dan perubahan kecepatan rambat gelombang akibat interaksinya dengan udara yang bergerak yaitu ′ , maka dengan menggunakan persamaan vektor diperoleh,
′
=−
(2.1)
dan
′
=+
(2.2)
yang mana persamaan 2.1 adalah persamaan perubahan kecepatan rambat ultrasonik saat arah pergerakan udara tersebut berlawanan arah dengan arah perambatan gelombang. Persamaan 2.2. adalah persaman saat arah perambatan gelombang sama dengan arah pergerakan udara. Dengan mendapatkan kedua hasil pengukuran tersebut, maka dapat diketahui kecepatan pergerakan udara ultrasonik dengan persamaan 2.3,
′ =
−
′
=+
=
′′
(2.3)
yang mana ′ adalah hasil pengukuran antara arah perambatan gelombang dan arah pergerakan udara yang searah dan ′adalah hasil pengukuran antara arah perambatan gelombang dan arah pergerakan udara yang berlawanan.
Pengukuran terhadap perubahan kecepatan rambat gelombang akan lebih mudah dilakukan dengan mengukur waktu yang dibutuhkan oleh gelombang untuk dapat merambat pada jarak tertentu yang telah ditetapkan.
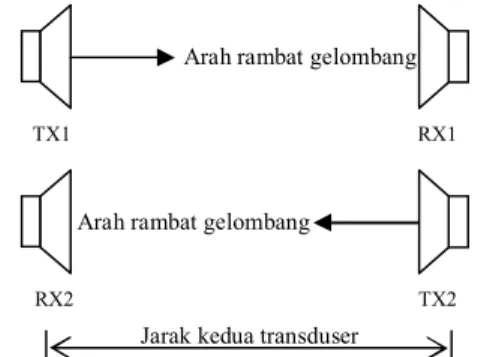
Gambar 1. Pola pengukuran kecepatan rambat ultrasonik
Untuk mendapatkan kedua hasil pengukuran tersebut, diposisikan dua pasang transduser pada arah yang berlawanan. Setiap pasang transduser terdiri dari satu transmitter dan satu receiver dengan arah
Jarak kedua transduser Arah rambat gelombang
TX1 RX1
Arah rambat gelombang
TX2 RX2
-58- copyright @ DTE FT USU pemancaran gelombang ultrasonik dari
transmitter menuju receiver seperti pada Gambar 1.
Pengukuran akan dilakukan secara bergantian pada masing-masing pasang transduser untuk menghindari kemungkinan terjadinya interferensi gelombang jika dilakukan pengukuran secara bersamaan. Dengan mengasumsikan kecepatan adalah hasil perbandingan antara jarak tempuh yang dilalui per satuan waktu, maka persamaan 2.3 dapat menjadi persamaan 2.4,
=
∆
−
∆ (2.4)dimana:
adalah kecepatan gerak udara ( ⁄ ) adalah jarak kedua transduser ( )
∆ adalah waktu cacah gelombang masing-masing pemancar ( )
3. Perancangan perangkat keras dan perangkat lunak
Sesuai dengan dasar teori pola pengukuran, dapat diasumsikan bahwa pengukuran terhadap perubahan kecepatan pergerakan udara dilakukan dengan menghitung perubahan selisih waktu yang dibutuhkan oleh gelombang untuk dapat merambat pada jarak yang telah ditentukan. Perancangan terhadap perangkat akan membutuhkan pembangkit dan penerima gelombang ultrasonik serta pendukungnya sebagai antarmuka gelombang ultrasonik yang digunakan dan juga pencacah waktu.
Transduser gelombang ultrasonik yang digunakan adalah SQ40T yang memiliki frekuensi kerja 40kHz dan terdiri dari sepasang transduser yang memiliki fungsi yang berbeda yaitu transmitter dan receiver. Transduser ini membutuhkan sinyal berbentuk kotak pada frekuensi sekitar 40kHz untuk dapat membangkitkan gelombang ultrasonik. Sinyal kotak tersebut dihasilkan secara digital oleh mikrokontroler dengan tujuan sinyal yang dihasilkan akan lebih stabil pada frekuensi 40kHz jika dibandingkan dengan pembangkitan secara analog oleh komponen kapasitor atau juga induktor.
Pada saat receiver SQ40T merespon gelombang ultrasonik pada frekuensi 40kHz, maka receiver tersebut akan menghasilkan
gelombang sinusoidal pada frekuensi 40kHz juga. Untuk dapat menggunakan sinyal tersebut menjadi sinyal interupsi terhadap pencacah waktu maka diperlukan beberapa proses pengkondisian sinyal.
Proses pengkondisian sinyal ini sendiri terdiri dari filtering sinyal, penguatan sinyal, pendeteksi puncak dan pendeteksi level netral. Proses pengkondisian sinyal tersebut dapat digambarkan seperti pada diagram blok Gambar 2.
Gambar 2.Blok diagram proses pengkondisian sinyal receiver
Secara umum, kecepatan rambat ultrasonik pada tekanan dan kelembaban udara udara yang konstan relatif linear terhadap perubahan suhu. Perubahan linear tersebut mengikuti persamaan 3.1,
= 331.6 ⁄ + 0.606 × (3.1)
dimana:
adalah kecepatan rambat ( ⁄ ) adalah suhu udara ( )
pada suhu 30 dapat diketahui kecepatan rambat ultrasonik adalah 349.78 ⁄ . Batas kecepatan rambat yang dapat ditolerir, dibutuhkan untuk menentukan batas variabel yang digunakan sebagai tempat menyimpan nilai cacah waktu serta untuk menentukan jarak optimal antara kedua transduser.
Jika diasumsikan terjadi perubahan kecepatan rambat ultrasonik yang disebabkan pergerakan udara dengan arah tepat tegak lurus terhadap arah perambatan gelombang dan menghasilkan perubahan arah perambatan maka sesuai dengan datasheet SQ40T, besar sudut bukaan maksimum yang dapat diterima adalah sebesar 15o terhadap sumbu pusat. Kisaran suhu pengukuran pergerakan udara adalah antara -15 sampai dengan 60 sehingga asumsi kecepatan rambat
Sinyal interupsi
filter Penguat Peak
Detector
Zero-crossing Detector RX
-59- copyright @ DTE FT USU gelombang adalah antara 322.51 ⁄ sampai
367.97 ⁄ dan kecepatan gerak maksimal yang diharapkan adalah antara 86.42 ⁄
sampai 98.6 ⁄ .
Sebagai langkah awal perancangan, jarak antara kedua transduser yang digunakan adalah 30cm dan waktu tunda sebagai hasil dari waktu yang dibutuhkan oleh gelombang untuk dapat merambat pada jarak tersebut adalah antara 0.81ms sampai 0.93ms.
Besar memori pada mikrokontroler yang dibutuhkan untuk menyimpan hasil pencacahan waktu diperoleh dengan mengasumsikan batas waktu tempuh gelombang ultrasonik terhadap skala waktu yang digunakan untuk membentuk satu cacah pada mikrokontroler. Jika pencacahan waktu menggunakan frekuensi cacah 1MHz, maka variabel yang digunakan harus mampu menyimpan data paling sedikit antara 815 cacah sampai dengan 930 cacah. Variabel yang tepat untuk kebutuhan ini adalah variable integer yang mana maksimal penyimpanan datanya adalah 65536 (16 bit atau 216) cacah.
Dengan besar kapasitas penyimpanan data tersebut, sistem pencacahan akan memiliki kesempatan untuk dapat menggunakan frekuensi cacah sampai 70MHz atau setidaknya memberikan toleransi tambahan waktu tunda sebagai tambahan tundaan waktu oleh proses pengkondisian sinyal.
Filter yang digunakan adalah high-pass orde pertama [4] dengan frekuensi cut-off 15.9kHz, sehingga nilai impedansi yang digunakan adalah resistor 10kΩ dan kapasitor 1nF. Penguat yang digunakan adalah IC TL072 dengan slew-rate yang cukup besar yaitu 13V/µs dengan konfigurasi rangkaian penguat non-inverting yang dikaskade sebanyak dua tingkat. Ilustrasi terhadap rangkaian ini adalah seperti Gambar 3.
Gambar 3. Ilustrasi rangkaian filter dan penguat terkaskade
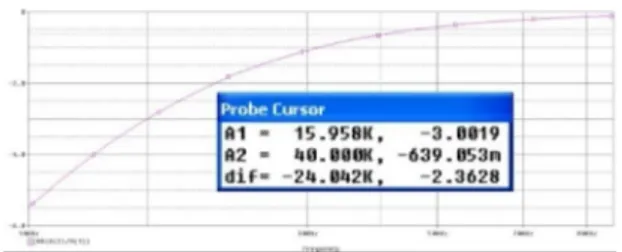
Pada rangkaian Gambar 3. terdapat R2 dan R3 yang digunakan sebagai parameter penguatan sinyal secara manual dengan menggunakan resistor variabel. Tanggap frekuensi pada rangkaian ini adalah seperti pada Gambar 4.
Gambar 4. Tanggap frekuensi pada rangkaian filter high-pass
Pelemahan yang terjadi pada frekuensi sinyal 40kHz adalah -639.053mdB, yang mana nilainya sangat kecil hingga dapat diabaikan.
Rangkaian berikutnya yang digunakan adalah rangkaian peak detector yang akan mempertahankan puncak sinyal sinusoidal yang telah melewati penguat TL072 terkaskade pada frekuensi 40kHz. Rangkaian peak detector yang dimaksud adalah seperti pada Gambar 5.
Gambar 5. Rangkain peredam dengan menggunakan komparator
Pada rangkaian Gambar 5. diilustrasikan rangkaian peredam atau peak detecktor yang dikombinasikan dengan rangkaian komparator. Rangkaian komparator tersebut berfungsi untuk mendeteksi batas level tegangan yang digunakan sebagai threshold sinyal untuk membangkitkan sinyal interupsi. Batas tersebut dapat dapat diubah dengan tujuan untuk menciptakan toleransi waktu tambahan untuk menghindari kemungkinan sinyal terpengaruh derau luar.
Fungsi interupsi yang akan dibangkitkan memiliki pola interupsi active-low atau akan dibangkitkan pada saat terjadi perubahan status logika dari level high menjadi low. Tujuan pembangkitan interupsi tesebut adalah untuk menghentikan pencacahan waktu yang dimulai pada saat yang
-60- copyright @ DTE FT USU bersamaan dengan pembangkitan sinyal
kotak untuk memicu pembangkitan gelombang ultrasonik.
Sinyal kotak tersebut dibangkitkan dengan mengubah level tegangan logika pada salah salah satu output timer mikrokontroler ATmega 32 yang mana berdasarkan tingkat prioritas interupsi timer[5], maka digunakan output Timer 2 yaitu pada pin PD7 atau kaki dengan nomer 27. Pengubahan status logika pada output terjadi secara berkala dengan besar tundaan untuk setiap perubahan adalah kurang lebih 12.5µs atau sesuai dengan frekuensi kerja transduser ultrasonik SQ40T.
Secara sistem, pembentukan tundaan dilakukan dengan memanfaatkan salah satu mode Timer yang akan mengubah status logika otuput secara otomatis saat tundaan yang dibentuk dari jumlah cacahan untuk tundaan terpenuhi. Mode ini dinamakan CTC (Clear Time on Compare match) dengan konfigurasi bit COM20 dan bit WGM21 pada register TCCR2 aktif. Besar tundaan yang diharapkan, ditulis dalam bentuk bilangan hexadesimal pada register OCR2 yang mana besarnya mengikuti persamaan 3.2
2 =
× (3.2)
Untuk mendapatkan frekuensi 40kHz dari mikrokontroler yang menggunakan kristal dengan frekuensi 16MHz dibutuhkan faktor pembagi 200 desimal atau 0xC8. Pada keadaan nyatanya, penggunaan nilai 40kHz pada sinyal pemicu gelombang ultrasonik tidak menjamin simpangan maksimal sinyal sinusoidal pada receiver, sehingga dibutuhkan penyesuaian nilai frekuensi sinyal kotak sehingga didapat simpangan optimal sinyal sinusoidal tersebut [3].
Indikator nilai yang digunakan berupa LCD 16x2 alfanumeric, mikrokontroler yang digunakan adalah ATMEL ATmega 32 pada sistem mikrokontrolernya, frekuensi cacah kristal yang digunakan adalah 16MHz dan bahasa program yang digunakan adalah bahasa C.
4. Pengujian
Pengujian terhadap frekuensi sinyal kotak yang digunakan sebagai sinyal picu gelombang ultrasonik, didapatkan frekuensi
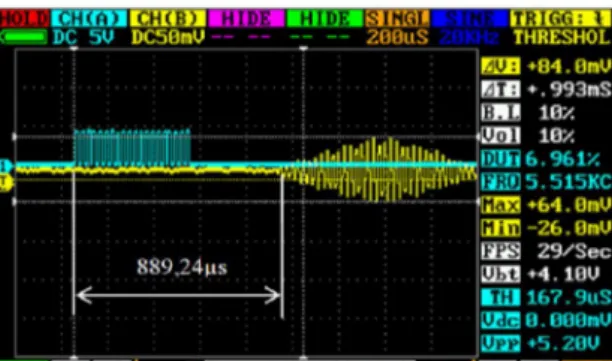
optimal sebesar 40.65kHz. Frekuensi optimal tersebut ditentukan berdasarkan respon pada receiver terhadap gelombang ultrasonik yang dipicu. Hasil pengamatan tersebut dilakukan dengan osciloscope seperti pada Gambar 6.
Gambar 6. Respon receiver terhadap gelombang ultrasonik
Waktu yang dibutuhkan gelombang ultrasonik untuk merambat pada media udara pada jarak 30cm pada percobaan ini adalah 889.24µs. Waktu tersebut diperoleh dengan membatasi pencacahan waktu yang dimulai sejak pembangkitan sinyal kotak pada transmitter sampai dengan pembangkitan sinyal sinusoidal sebagai respon terhadap gelombang ultrasonik pada
receiver. Hasil pengamatan tersebut
ditunjukkan seperti pada Gambar 7.
Gambar 7. Waktu rambat gelombang ultrasonik pada jarak 30cm
Pengujian rangkaian pengkondisian sinyal analog diperoleh tambahan tundaan waktu waktu yang sangat besar hingga 398.49µs yang diukur sejak pembangkitan sinyal kotak pada transmitter sampai dengan perubahan level tegangan logika output komparator pada rangkaian pengkondisi sinyal. Perubahan level tegangan logika output tersebut digunakan sebagai sinyal interupsi terhadap pencacah waktu.
-61- copyright @ DTE FT USU Pada pengujian sistem pencacah waktu
secara keseluruhan yang melibatkan pembangkitan sinyal pemicu gelombang ultrasonik, pengkondisian sinyal pada receiver dan pencacahan waktu serta fasilitas interupsi terhadap pencacahannya, terjadi overflow dari batas toleransi waktu cacah yaitu dua kali waktu tunda terhadap rambat gelombang ultrasonik atau sekitar 2ms. Pengujian tersebut dilakukan dengan menggunakan bahasa pemrograman C pada sistem mikrokontroler ATmega32, dan juga menggunakan antarmuka indikator berupa LCD 16x2 alfanumeric.
5. Kesimpulan dan Saran 5.1.Kesimpulan
1.
Hasil pengujian terhadap rancangan anemometer ini masih tidak sesuai dengan hasil yang diharapkan, seperti waktu cacah yang masih mengalami over-flow dan interupsi eksternal yang mempengaruhi interupsi internal pada Timer mikrokontroler yang mungkin disebabkan oleh tundaan waktu pada saat ekseskusi program interupsi yang relatif lama atau juga disebabkan oleh beberapa fasilitas interupsi yang masih saling mempengaruhi walaupun telah memiliki prioritas eksekusi pada compiler C GCC-AVR.2. Tundaan tambahan yang dihasilkan pada rangkaian pengkondisi sinyal receiver relatif sangat besar yaitu sekitar 398.49µs atau sekitar 44.8% dari waktu yang dibutuhkan oleh gelombang ultrasonik untuk dapat ditransmisikan pada jarak 30cm yaitu sekitar 889.24µs.
3.
Pembangkitan sinyal kotak yang dilakukan bersamaan denganpencacahan waktu pada
mikrokontroler yang sama, berpotensi terjadinya gangguan. 5.2.Saran
Dibutuhkan penelitian mendalam pada proses eksekusi interupsi oleh fasilitas timer internal, interupsi eksternal, proses pembangkitan sinyal kotak , waktu pemrosesan
dan interaksi antara fasilitas interupsi saat dibangkitkan pada satu sistem yang sama dengan menggunakan bahasa pemrograman C pada compiller GCC-AVR.
Daftar Pustaka
[1] Resnick, Halliday 1985 Physics, 3rd Edition. Bandung: Departemen Fisika Institut Teknologi Bandung
[2] Millman, jacob – Halkias, Christos C. 1972 Intergrated Electronics.
McGRAW-HILL INTERNATIONAL
BOOK COMPANY
[3] Millman, Jacob – Sutanto 1992. Mikroelektronika Sistem Digital dan Rangkaian Analog. Jakarta: PENERBIT ERLANGGA
[4] Putra, Agfianto Eko 2002. Penapis Aktif
Elektronika: Teori dan Praktek.
Yogyakarta: Gava Media
[5] Winoto, Ardi 2008. Mikontroler AVR
Atmega8/32/16/8535. Bandung:
INFORMATIKA
[6] Hartanto, Budi 2004. Memahami Logika Pembuatan Program C Secara Mudah. Yogyakarta: Penerbit ANDI Yogyakarta