2.1. Gelombang ulrasonik
Untuk dapat mengamati perubahan yang terjadi pada udara, dapat dilakukan dengan mengamati kejadian fisis akibat suatu pengkondisian tertentu yang memberikan respon berbeda dengan keadaan umumnya. Seperti untuk mengetahui
kecepatan pergerakan udara, dapat dilakukan dengan mengkondisikan udara tersebut sebagai media perambatan gelombang mekanis sehingga perubahan terhadap kecepatan rambat gelombang tersebut dapat memberikan indikasi terhadap pergerakan udara itu sendiri.
“Jangkauan ini adalah dari kira-kira 20 siklus/detik (atau 20Hz) sampai kira-kira 20.000 Hz dan dinamakan jangkauan suara yang dapat didengar (audible range). Sebuah gelombang mekanis longitudinal yang frekuensinya berada dibawah jangkauan yang kedengaran tersebut dinamakan sebuah gelombang infrasonik (Infrasonic Wave), dan gelombang yang frekuensinya berada diatas jangkauan yang kedengaran dinamakan gelombang ultrasonik (Ultrasonic Wave)” – Halliday-Resnick, 3th edition Terjemahan Pantur Silaban-Erwin Sucipto, hal. 656.
Pembagian kelompok frekuensi gelombang mekanis secara ilmiah didasarkan pada “Jangkauan frekuensi yang dapat merangsang telinga dan otak manusia kepada sensasi pendengaran”. Gelombang mekanis dapat merambat melalui benda padat, benda cair dan gas. Partikel-partikel pada media perambatan gelombang mekanis yang berosilasi pada arah perambatan gelombang itu sendiri. Sifat gelombang longitudinal adalah dapat menyebar ke segala arah jika tidak dihalangi. Kecepatan perambatan gelombang mekanis sangat tergantung pada kerapatan partikel media perambatannya, yang mana semakin besar tingkat kerapatan partikel maka semakin cepat gelombang mekanis dapat merambat. Pada media perambatan gas, akan terbentuk ruang termampatkan atau terkompresi dan ruang yang jauh lebih renggang saat partikel gas tersebut berosilasi. Dengan menggunakan persamaan gerak Newtor, persamaan pergerakan partikel tersebut dapat ditulis seperti berikut,
∆
∆ (2.1)
∆ adalah selisih waktu yang dibutuhkan gelombang untuk dapat merambat ( )
Secara umum kecepatan rambat gelombang mekanis longitudinal di udara dengan keadaan normal pada suhu 0 adalah 331,3 ⁄ , dapat berubah seiring dengan perubahan materi penyusun, suhu, kelembaban serta tekanan. Dengan mengasumsikan bahwa perubahan materi penyusun, kelembaban dan tekanan tidak dapat terjadi
dengan cepat seperti pada perubahan suhu, maka kecepatan perambatan gelombang mekanis dapat mengikuti persamaan berikut,
331.6 ⁄ 0.606 ⁄ (2.2)
Dengan :
adalah kecepatan rambat gelombang mekanis ( ⁄ ) adalah suhu udara ( )
Proses perambatan gelombang mekanis pada partikel udara adalah dengan memanfaatkan fenomena pemampatan dan perenggangan volume udara, sehingga pergerakan transmitter gelombang atau receiver gelombang dapat berpengaruh terhadap frekuensi.
2.2. Efek Doppler
Perubahan frekuensi gelombang mekanis akibat pergerakan transmitter atau receiver merupakan poin utama dalam penjelasan efek Doppler. Frekuensi gelombang yang ditangkap oleh receiver akan menjadi lebih besar saat receiver bergerak menuju transmitter atau saat transmitter bergerak menuju receiver, sedangkan frekuensi akan semakin kecil jika salah satu atau kedua-duanya bergerak saling menjauh dari yang lain.
Secara matematis, hubungan frekuensi gelombang pada fenomena efek Doppler adalah seperti pada persamaan berikut,
(2.3)
Dengan:
adalah frekuensi yang ditangkap oleh receiver (Hz) adalah frekuensi gelombang yang dipancarkan (Hz) adalah kecepatan rambat gelombang ( ⁄ )
adalah kecepatan perpindahan transmitter ( ⁄ )
Yang mana saat transmitter bergerak mendekati receiver, maka kecepatan akan bernilai negatif dan sebaliknya, sedangkan pada saat receiver bergerak mendekati transmitter maka kecepatan perpindahan receiver adalah positif dan sebaliknya.
Saat media perambatan gelombang bergerak dengan kecepatan yang tetap, maka yang terjadi adalah frekuensi pada salah satu transduser berkurang sedangkan pada transduser yang lain akan bertambah atau dengan kata lain, tidak ada perubahan frekuensi saat media perambatan gelombang bergerak. Pembuktiannya adalah seperti berikut, diasumsikan kecepatan rambat gelombang adalah dengan arah pergerakan
udara dari transmitter menuju receiver yang mana bisa diartikan gerak transmitter menjauhi receiver sedangkan gerakan receiver menuju transmitter dengan kecepatan yang sama atau sama dengan , sehingga secara matematis dapat ditulis seperti
berikut.
adalah frekuensi yang ditangkap oleh receiver (Hz) adalah frekuensi gelombang yang dipancarkan (Hz) adalah kecepatan rambat gelombang ( ⁄ )
adalah kecepatan perpindahan receiver ( ⁄ ) adalah kecepatan perpindahan transmitter ( ⁄ )
2.3. Pengukuran Pergerakan Udara
Penggunaan gelombang ultrasonik sebagai media pengukuran adalah karena gelombang ini sangat sedikit dihasilkan secara alami sehingga kemungkinan terjadinya interferensi dengan gelombang yang memiliki frekuensi yang sama sangat kecil. Pembangkitan gelombang ultrasonik dilakukan dengan menggunakan transduser kristal kuarsa yang mana akan beresonansi saat diinduksi oleh medan listrik bolak-balik, atau yang dikenal dengan efek piezoelectric.
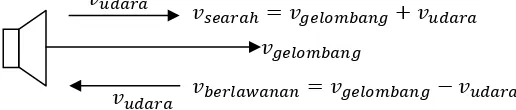
Untuk mengukur perubahan kecepatan pergerakan udara yang menjadi media perambatan gelombang ultrasonik dilakukan dengan mengukur perubahan waktu tempuhnya perambatan gelombang ultrasonik itu sendiri. Kecepatan perambatan gelombang akan bernilai resultan terhadap arah dan kecepatan pergerakan udara, yang mana akan bernilai selisih saat arah kedua kecepatan tersebut berlawanan dan berakumulasi saat arah keduanya adalah sama. Sebagai gambaran terhadap fenomena ini, ilustrasi arah perambatan akan disajikan bersama dengan persamaan resultan kecepatan perambatan gelombang seperti pada Gambar 2.1.
Gambar 2.1. Ilustrasi kecepatan resultan pada gelombang
Kecepatan udara dapat diketahui jika kedua kecepatan resultan diperoleh, yaitu dengan persamaan berikut,
(2.8)
(2.9)
dan selisih pada persamaan 2.8 dan 2.9 adalah,
2 (2.10)
atau
(2.11)
Dengan:
adalah resultan kecepatan gelombang dengan arah yang sama dengan arah gerak udara ( ⁄ )
adalah resultan kecepatan gelombang dengan arah yang berlawanan dengan arah gerak udara ( ⁄ )
Dengan mengetahui besar kecepatan rambat masing-masing arah perambatan, maka didapat kecepatan pergerakan udara.
2.4. Transduser gelombang ultrasonik
Transduser yang digunakan adalah kristal ultrasonik yang bekerja dengan prinsip efek Piezoelectric pada frekuensi tengah sekitar 40KHz. Transduser ini paling mudah ditemukan dan paling banyak digunakan, terutama untuk aplikasi Ultrasonic Range Finder yang juga memanfaatkan gelombang ultrasonik sebagai media pengukur jarak.
Bentuk fisik dari transduser ini adalah seperti pada Gambar 2.2.
Gambar 2.2. Bentuk fisik transduser ultrasonik
Transduser pada Gambar 2.2. memiliki 2 kaki yang berfungsi sebagai jalur sinyal pemicu pembangkitan gelombang ultrasonik. Sinyal yang digunakan sebagai pemicu adalah gelombang kotak dengan frekuensi yang sama dengan frekuensi gelombang kotak yang akan dibangkitkan yaitu 40KHz. Kedua kaki transduser ini sendiri tidak memiliki polaritas yang spesifik, namun salah satu kaki terhubung dengan pelindung luar transduser yang dapat diasumsikan sebagai polar netral. Meskipun demikian, tidak ada keharusan penempatan kedua kaki transduser ini berdasarkan polaritasnya.
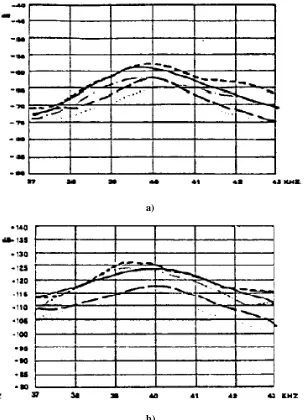
Pada Gambar 2.3. terlihat jelas bahwa tanggap frekuensi yang dimiliki oleh masing-masing fungsi pada transduser memiliki perbedaan, terutama pada frekuensi kerjanya yaitu 40KHz. Pada receiver (a), frekuensi 40KHz bukanlah respon maksimal terhadap frekuensi gelombang ultrasonik melainkan sedikit lebih kecil mendekati nilai 39.5KHz dan pada transmitter (b), frekuensi 40KHz bukanlah frekuensi yang digunakan untuk dapat memproduksi gelombang ultrasonik pada simpangan terbesarnya melainkan sedikit lebih besar dari 40KHz atau sekitar 40,25KHz. Untuk
mengetahui frekuensi optimum gelombang kotak untuk memicu gelombang ultrasonik pada transmitter yang kemudia direproduksi menjadi gelombang sinusoidal oleh receiver, maka diperlukan pendekatan frekuensi melalui ujicoba pengubahan nilai frekuensi gelombang kotak.
a)
b)
Gambar 2.3. Karakter frekuensi transduser ultrasonik
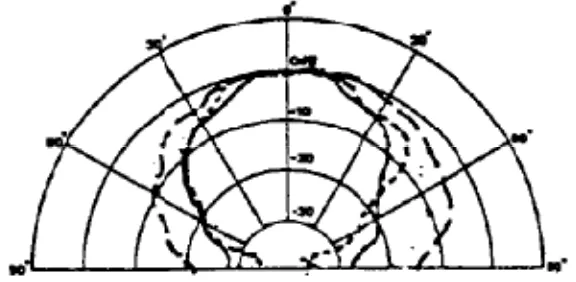
Arah perambatan transduser ini sangat terbatas mengingat fungsi dari transduser yang tidak membutuhkan arah perambatan yang bebas atau kesegala arah. Ilustrasi arah perambatan berdasarkan kekuatan sinyal transduser ini adalah seperti pada Gambar 2.4. berikut,
Gambar 2.4. Ilustrasi arah perambatan berdasarkan kekuatan gelombang ultrasonik
Arah perambatan optimum adalah sekitar 15o dari pusat arah perambatannya.
Transmitter transduser ini dapat di-driving secara langsung dengan arus DC pada rentang tegangan 2Volt sampai 7Volt atau dengan sinyal kotak pada tegangan Vrms
sebesar 20Volt.
2.5. Antarmuka Indikator
Untuk menampilkan hasil pengukuran, diperlukan antarmuka yang dapat digunakan sebagai display numerik dan karakter. Pembangkitan sinyal kotak dilakukan oleh mikrokontroler dengan memanfaatkan pencacah internal, sehingga diperlukan antarmuka yang tidak bergantung pada pencacah internal untuk menampilkan hasil pengukuran dan juga mempertahankan hasil tersebut. Modul LCD 16x2 merupakan solusi yang tepat karena selain dapat menampilkan data karakter dan numerik, hasil tampilan dapat dipertahankan tanpa harus bergantung kepada mikrokontroler.
Modul LCD16x2 memiliki konfigurasi jalur komunikasi paralel dengan susunan seperti berikut,
4. RS Æ difungsikan untuk pemilih register (HIGH untuk Command dan LOW untuk Data)
5. R/WÆ difungsikan untuk memili fungsi jalur komunikasi (HIGH untuk Read dan LOW untuk Write)
6. E Æ difungsikan sebagai jalur enable sehingga data yang diterima atau dikirim dapat disimpan dalam register data.
7. DB0 – DB7 Æ jalur data parallel LCD
8. A Æ difungsikan sebagai pin positif power supply pada backlight 9. K Æ difungsikan sebagai pin negatif power supply pada backlight
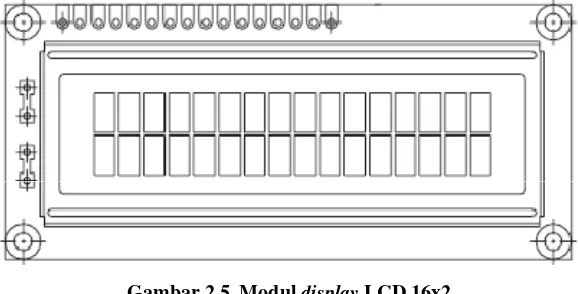
Modul display LCD 16x2 memiliki bentuk seperti pada Gambar 2.5. dengan urutan port antarmuka dimulai dari kanan ke kiri.
Gambar 2.5. Modul display LCD 16x2
Pola pengiriman data pada modul ini berdasarkan lebar jalur data yang digunakan terbagi atas dua bentuk yaitu pola full mode yaitu menggunakan 8 bit jalur (DB0 – DB7) sebagai jalur data dan kendali pada satu enable clock (E) dan pola half mode yaitu menggunakan 4 bit jalur (DB4 – DB7) sebagai jalur data dan kendali dengan
dua enable clock yang mana pengirimannya dimulai dari 4 bit MSB dan kemudian
dilanjutkan dengan 4 bit LSB.
Prosedur komunikasi pada modul ini dimulai dengan inisialisasi konfigurasi tampilan, dan kendali yang dikirikan kepada modul ini harus sesuai dengan ketentuan standard seperti pada Tabel 2.1. Frekuensi pengiriman data dapat mencapai 1MHz, akan tetapi rekomendasi frekuensi transaksi data adalah sekitar 172KHz. Karakter
Tabel 2.1. Daftar perintah standard modul LCD 16x2
2.6. Mikrokontroler
Spesifikasi yang dibutuhkan dalam perancangan ini dari mikrokontroler adalah, 1. Memiliki fasilitas Timer/Counter internal paling sedikit 3 buah
2. Memiliki fasilitas Interupt eksternal paling sedikit 3 buah 3. Dapat bekerja pada frekuensi minimal 10MHz
4. Memiliki jalur komunikasi paling sedikit 6 pin selain dari jalur interupt dan jalur Timer/Counter
5. Memiliki RAM minimal 512 Byte, EEPROM 512 Byte dan memori Flash minimal sebesar 16Kbyte.
Spesifikasi ini didasarkan pada kebutuhan pembangkit sinyal kotak yang dikerjakan oleh mikrokontroler sebanyak 2 dan 1 untuk mencacah waktu, 6 pin jalur data sebagai jalur komunikasi dengan modul LCD 16x2 pada mode paruh (Half mode), 3 jalur interupt eksternal untuk kebutuhan jalur untuk merespon sinyal receiver sebanyak 2 dan 1 sebagai jalur yang dicadangkan, sedangkan kebutuhan akan memori merujuk pada bahasa program yang digunakan yaitu bahasa permrograman C. Dari beberapa spesifikasi yang diharapkan, diperoleh beberapa pilihan yaitu AVR ATmega16 dan AVR ATmega32. Dari ketersediaan dan jangkauan harga maka dipilih ATmega32 dengan pertimbangan kebutuhan antarmuka yang terpenuhi dengan kapasitas memori yang cukup besar dibanding ATmega16 akan tetapi dengan harga yang relatif sebanding dan mudah diperoleh di pasaran.
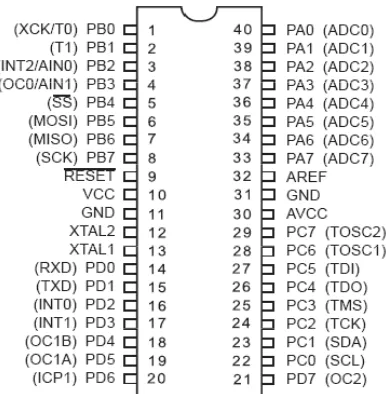
Gambar 2.6. Fungsi masing-masing pin pada mikrokontroler ATmega32
Timer/Counter pada ATmega32 terdiri atas 3 buah dengan penamaannya secara berurutan adalah TIMER0, TIMER1 dan TIMER2. Ketiga Timer/Coounter tersebut memiliki perbedaan yaitu TIMER0 memiliki lebar register 8 bit dengan fungsi Timer maupun Counter, External Pulse Counter, pembangkit sinyal kotak dengan mode CTC (Clear Timer when Compare match), 5 prescaler dari sumber clock utama. TIMER2 memiliki 7 prescaler dari sumber clock utama dan semua kemampuan TIMER0 kecuali kemampuan untuk mencacah pulsa luar. Sedangkan TIMER1 memiliki lebar register 16 bit dan seluruh kemampuan Timer0 bahkan dapat menbangkitkan sinyal kotak melalui dua jalur yang berbeda, dapat men-capture sinyal luar yang dianggap sebagai extenal event, dapat membangkitkan sinyal PWM.