MAKALAH
KENDAI
SOLAR TRACKER
PADA SISTEM PLTS BERBASIS MIKROKONTROLER
ATmega8535
Disusun Oleh :
CAHYO APRILIYANTO S
D 4000 900 59
FAKULTAS TEKNIK JURUSAN TEKNIK ELEKTRO
UNIVERSITAS MUHAMMADIYAH SURAKARTA
KENDAI
SOLAR TRACKER
PADA SISTEM PLTS BERBASIS MIKROKONTROLER
ATmega8535
CAHYO APRILIYANTO S
FAKULTAS TEKNIK JURUSAN TEKNIK ELEKTRO
UNIVERSITAS MUHAMMADIYAH SURAKARTA
E-mail : [email protected]
ABSTRAKSI
Tujuan utama dari penelitian ini adalah membuat sistem kendali penjejak matahari untuk menggerakan panel surya yang dapat mengikuti arah pergerakan matahari, sehingga energi listrik yang dihasilkan dapat maksimal. Untuk mencari arah datangnya sinar matahari, digunakan empat sensor Light Dependent Resistor (LDR) yang memberikan informasi besar intensitas cahaya yang diterima masing-masing sensor. Pengolahan data-data intensitas, penentuan arah putaran motor DC dilakukan oleh mikrokontroler ATmega8535. Selanjutnya tegangan dan arus yang dihasilkan panel surya ditampilkan menggunakan LCD 2x16.
Pengujian dilakukan selama tiga hari pada tempat yang terkena pancaran sinar matahari secara bebas dari pukul 07.00 – 17.00 WIB dengan menggunakan dua buah panel surya yang sejenis, satu panel surya menggunakan solar tracker dan satu panel tanpa menggunakan solar tracker dengan posisi menghadap tegak lurus keatas. Dari hasil pengujian diperoleh data bahwa panel surya menggunakan solar tracker pada pagi hari (pukul 07.00 – 10.00) menghasilkan prosentase tegangan rata -rata lebih besar 9,17 % dan sore hari (pukul 14.00 – 17.00) menghasilkan prosentase tegangan rata – rata lebih besar 8,25 % dibandingkan dengan panel surya tanpa solar tracker. Siang hari (pukul 11.00 – 13.00) tegangan yang dihasilkan kedua panel surya relatif sama , panel surya menggunakan solar tracker hanya menghasilkan prosentase tegangan rata – rata lebih besar 1,6 % dibandingkan panel surya tanpa solar tracker.
Kata Kunci : Panel Surya, Mikrokontroler ATmega8535, LCD, LDR, Motor DC.
1. PENDAHULUAN
Kawasan Indonesia merupakan salah satu kawasan yang memiliki banyak sumber energi alam yang dapat digunakan sebagai energi alternatif untuk pembangkitan energi listrik. Upaya-upaya eksplorasi untuk membangitkan energi listrik sangat penting untuk dilakukan terutama dalam mengatasi krisis energi listrik yang sedang melanda negara kita.
Beberapa hal yang menjadi pertimbangan dalam pembangkitan energi listrik adalah menghasilkan jumlah energi yang cukup besar, biaya ekonomis dan tidak berdampak negatif terhadap lingkungan. Mengingat negara Indonesia berada dekat garis khatulistiwa dengan pancaran sinar matahari yang cukup banyak sepanjang tahun, maka salah satu sumber energi yang bagus untuk dikembangkan adalah energi matahari. Pemanfaatan energi matahari dalam pembangkitan energi listrik telah banyak dilakukan dengan menggunakan panel surya. Panel surya yang terpasang selama ini masih bersifat statis (tidak mengikuti pergerakan matahari). Berdasarkan kondisi ini, maka panel surya tidak dapat menangkap cahaya secara maksimal pancaran sinar matahari sepanjang siang hari. Akibatnya energi listrik yang
dibangkitkan tidak maksimal. Keterbatasan pada panel surya yang statis tersebut dapat diatasi, maka pada penelitian ini akan dirancang sebuah panel surya yang dapat mengikuti arah pergerakan matahari. Selanjutnya akan dianalisis unjuk kerjanya dan dibandingkan dengan unjuk kerja panel surya statis.
yang dihasilkan modul surya sangat dipengaruhi oleh intensitas cahaya matahari yang diterima oleh sistem.
1.1. LDR (Light Dependent Resistor)
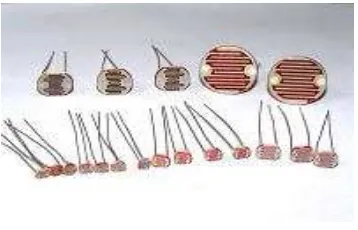
LDR adalah komponen elektronika terdiri atas sebuah cakram semikonduktor yang mempunyai dua buah elektroda pada permukaannya. Kondisi gelap atau cahaya redup, bahan dari cakram tersebut menghasilkan elektron bebas dengan jumlah yang relatif kecil, sehingga sedikit elektron untuk mengangkut muatan elektrik. Artinya pada saat cahaya redup, LDR menjadi konduktor yang buruk, atau bisa disebut juga LDR memiliki resistansi yang besar pada saat gelap atau cahaya redup. Saat cahaya terang, ada lebih banyak elektron yang lepas dari atom bahan semikonduktor tersebut. Hal ini mengakibatkan ada lebih banyak elektron untuk mengangkut muatan elektrik. Artinya pada saat cahaya terang, LDR menjadi konduktor yang baik, atau bisa disebut juga LDR memiliki resistansi yang kecil pada saat cahaya terang. Simbol dari komponen LDR dapat dilihat pada Gambar 1.
Gambar 1. Simbol LDR
Bentuk dari komponen LDR dapat dilihat pada Gambar 2.
Gambar 2. Komponen LDR
Karakteristik LDR terdiri atas dua macam yaitu Laju Recovery dan Respon Spektral:
1. Laju Recovery
Bila sebuah LDR dibawa dari suatu ruangan dengan level kekuatan cahaya tertentu ke dalam suatu ruangan yang gelap, maka bisa diamati bahwa nilai resistansi dari LDR tidak akan segera berubah resistansinya pada keadaan ruangan gelap. Namun LDR akan bisa mencapai harga di kegelapan setelah mengalami selang waktu tertentu. Laju recovery merupakan suatu ukuran praktis dan suatu kenaikan nilai resistansi dalam waktu tertentu. Harga ini ditulis dalam K /detik, untuk LDR tipe arus harganya lebih besar dari 200 K /detik (selama 20 menit pertama mulai dari level cahaya 100 lux), kecepatan tersebut akan lebih tinggi pada arah sebaliknya, yaitu pindah dari tempat gelap ke tempat terang yang memerlukan waktu kurang dari 10 ms untuk mencapai resistansi yang sesuai dengan level cahaya 400 lux.
2. Respon Spektral
LDR tidak mempunyai sensitivitas yang sama untuk setiap panjang gelombang cahaya yang jatuh padanya (yaitu warna). Bahan yang biasa digunakan sebagai penghantar arus listrik yaitu tembaga, alumunium, baja, emas, dan perak. Berdasarkan dari kelima bahan tersebut, maka tembaga merupakan penghantar yang paling banyak digunakan karena mempunyai daya hantar yang baik.
1.2. Mikrokontroler AVR ATmega8535
AVR adalah mikrokontroler RISC (Reduce Instruction Set Compute) 8 bit berdasarkan arsitektur Harvard. AVR memiliki keunggulan dibandingkan dengan mikrokontroler lain, yaitu memiliki kecepatan eksekusi program yang lebih cepat karena sebagian besar instruksi dieksekusi dalam 1 siklus clock, lebih cepat dibandingkan mikrokontroler MCS51 yang membutuhkan 12 siklus clock untuk mengeksekusi 1 instruksi.
AVR memiliki fitur lengkap yaitu ADC internal, EEPROM internal, Timer/Counter, watchdog timer, PWM, Port I/O, komunikasi serial, komparator, dan lain-lain. Fasilitas yang lengkap dapat digunakan untuk berbagai aplikasi sistem elektronika seperti robot, peralatan komunikasi, dan berbagai keperluan lainnya.
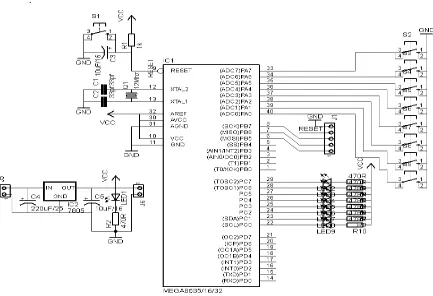
Sistem minimum mikrokontroler ATmega8535 dapat dilihat pada Gambar 3 .
Gambar 3. Sistem Minimum Mikrokontroler ATmega8535 Secara umum AVR dikelompokkan menjadi 3
kelompok yaitu AT90Sxx, ATmega, dan ATtiny. Fitur ATmega8535 meliputi :
a). Mikrokontroler AVR 8 bit yang memiliki kemampuan tinggi, dengan daya relatif rendah. b). Arsitektur RISC dengan throughput mencapai 16
MIPS pada frekuensi 16MHz.
c). Memiliki kapasitas Flash memory 8 Kbyte, EEPROM 512 byte dan SRAM 512 byte.
d). Saluran I/O sebanyak 32 buah, yaitu Port A, Port B, Port C, dan Port D.
e). CPU yang terdiri atas 32 buah register. f). Port USART untuk komunikasi serial. g). Fitur Peripheral.
a. Tiga buah Timer/Counter dengan kemapuan pembandingan.
1) 2 (dua) buah Timer/Counter 8 bit dengan prescaler terpisah dengan Mode Compare. 2) 1 (satu) buah Timer/Counter 16 bit dengan
prescaler terpisah, Mode Compare, dan Mode Capture.
b. Real Time Counter dengan Oscillator tersendiri. c. 4 channel PWM.
d. 8 channel, 10-bit ADC.
e. Byte-oriented Two-wire Serial Interface. f. Programmeble Serial USART.
g. Watchdog Timer dengan internal Oscillator. h. On-chip Analog Comparator.
2. Konfigurasi Pin ATmega8535
Konfigurasi pin ATmega8535 dengan kemasan 40 pin DIP (Dual In-line Package) dapat dilihat pada Gambar 2.4.
Konfigurasi pin ATmega8535 dengan kemasan 40 pin DIP (Dual In-line Package) dapat kita lihat pada Gambar 2.4 dapat dijelaskan fungsi dari masing-masing pin ATmega8535 sebagai berikut :
a).VCC merupakan pin yang berfungsi sebagai masukan catu daya.
b).GND merupakan pin ground.
c).Port A(PA0..PA7) merupakan pin input/output dua arah dan pin masukan ADC.
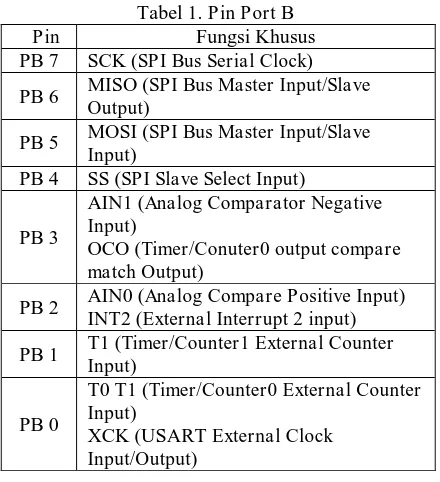
d).Port B(PB0..PB7) merupakan pin input/output dua arah dan pin fungsi khusus, seperti dilihat pada Tabel 1.
Tabel 1. Pin Port B Pin Fungsi Khusus PB 7 SCK (SPI Bus Serial Clock) PB 6 MISO (SPI Bus Master Input/Slave
Output)
PB 5 MOSI (SPI Bus Master Input/Slave Input)
PB 4 SS (SPI Slave Select Input)
PB 3
AIN1 (Analog Comparator Negative Input)
OCO (Timer/Conuter0 output compare match Output)
PB 2 AIN0 (Analog Compare Positive Input) INT2 (External Interrupt 2 input) PB 1 T1 (Timer/Counter1 External Counter
Input)
PB 0
T0 T1 (Timer/Counter0 External Counter Input)
XCK (USART External Clock Input/Output)
e).Port C(PC0..PC7) merupakan pin input/output dua arah dan pin fungsi khusus, seperti dilihat pada Tabel 2.
Tabel 2. Pin Port C Pin Fungsi Khusus PC 7 TOSC2 (Timer Oscillator Pin2) PC 6 TOSC1 (Timer Oscillator Pin1) PC 5 TD1 (JTAG Test Data In) PC 4 TD0 (JTAG Test Data Out) PC 3 TMS (JTAG Mode Select) PC 2 TCK (JTAG Test Clock) PC 1 SDA (Two-wire Serial Bus Data Input/Output Line) PC 0 SCL (Two-wire Serial Bus Clock Line)
f). Port D(PD0..PD7) merupakan pin input/output dua arah dan pin fungsi khusus, seperti dilihat pada Tabel 3.
Tabel 3. Pin Port D Pin Fungsi Khusus
PD 7 OC2 (Timer/Counter2 Output Compare Match Output) PD 6 ICP (Timer/Counter1 Input Capture Pin) PD 5 OC1A (Timer/Counter 1 Output Compare A Match Output)
PD 4 OC1B (Timer/Counter 1 Output Compare B Match Output)
PD 3 INT1 (Internal Interrupt 1 Input) PD 2 INT0 (Internal Interrupt 0 Input) PD 1 TXD (USART Output Pin)
i). AVCC merupakan pin masukan tegangan untuk ADC.
j). AREF merupakan pin masukan tegangan referensi ADC.
1.3. Sel Surya
Sel surya merupakan suatu devais semikonduktor yang dapat menghasilkan listrik jika diberikan sejumlah energi cahaya. Sel surya merupakan komponen yang umumnya terbuat dari bahan semikonduktor. Bahan multicrystalline silicon yang paling banyak dipakai dalam industri sel surya. Multicrystalline dan monocrystalline silicon menghasilkan efisiensi yang relatif lebih tinggi daripada amorphous silicon, sedangkan amorphus silicon dipakai karena biaya yang relatif lebih rendah.
Selain dari bahan nonorganik di atas dipakai pula molekul-molekul organik walaupun masih dalam tahap penelitian. Sebagai salah satu ukuran performansi sel surya adalah efisiensi. Yaitu prosentasi perubahan energi cahaya matahari menjadi energi listrik. Ini merupakan efisiensi yang terbesar yang pernah dicapai. Tenaga listrik yang dihasilkan oleh satu sel surya sangat kecil, maka beberapa sel surya harus digabungkan sehingga terbentuklah satuan komponen yang disebut panel surya.
yang bernomor seri NE-J130A yang mempunyai efisiensi 15.3% diperlukan luas 23.1 meter persegi untuk menghasilkan listrik sebesar 3 KW. Besarnya kapasitas PLTS yang ingin dipasang menambah luas area pemasangan.
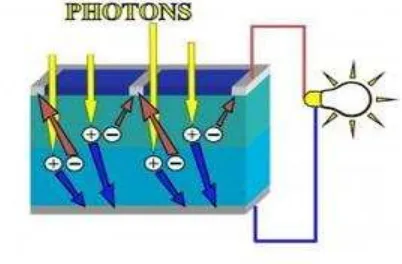
Cara kerja sel surya sendiri sebenarnya identik dengan komponen semikonduktor dioda. Ketika cahaya bersentuhan dengan sel surya dan diserap oleh bahan semi-konduktor, maka terjadi pelepasan elektron. Apabila elektron tersebut bisa menempuh perjalanan menuju bahan semi-konduktor pada lapisan yang berbeda, maka terjadi perubahan sigma gaya-gaya pada bahan. Gaya tolakan antar bahan semi-konduktor menyebabkan aliran medan listrik. Aliran medan listrik ini menyebabkan elektron dapat disalurkan ke saluran awal dan akhir untuk digunakan pada peralatan listrik.
Untuk memperkenalkan cara kerja sel surya secara umum, Gambar 5 menjelaskan segalanya tentang proses cara kerja sel surya merubah cahaya matahari menjadi energi listrik.
Gambar 5. Cara Kerja Sel Surya
Contoh dari sel surya yang telah disusun menjadi panel surya yang beredar di pasaran dapat dilihat pada Gambar 6.
Gambar 6. Panel Surya
1.4. LCD 2x16
LCD adalah alat yang dibuat pabrik yang sudah standar dapat menampilkan karakter dua baris dengan
tiap baris 16 karakter. Bentuk dari LCD 2x16 dapat dilihat pada Gambar 7.
Gambar 7. LCD 2 x 16 Parameter :
Layar hijau : Kontras dan tampilan karakter satu warna ( hitam sampai dengan abu – abu ).
Layar biru : Kontras abu – abu dan tamilan karakter putih.
Cara kerja :
Karena LCD sudah dilengkapi perangkat pengontrol sendiri yang menyatu dengan LCD, maka kita tinggal mengikuti aturan standar yang telah disimpan dalam pengontrol tersebut. Deskripsi dari pin LCD 2x16 dapat dilihat pada Tabel 4.
Tabel 4. Deskripsi Pin LCD 2 x 16 Pin Simbol Kemungkinan Fungsi
1 Vss - (GND) 2 Vdd/Vcc - (+5V) 3 Vee - Contrast 4 RS 0/1
0 = Instruction input / 1 = Data input
5 R / W 0 / 1
0 = Write to LCD module / 1 = Read from LCD module 6 E 1, 1-->0 Enable signal 7 DB0 0 / 1 Data pin 0 8 DB1 0 / 1 Data pin 1 9 DB2 0 / 1 Data pin 2 10 DB3 0 / 1 Data pin 3 11 DB4 0 / 1 Data pin 4 12 DB5 0 / 1 Data pin 5 13 DB6 0 / 1 Data pin 6 14 DB7 0 / 1 Data pin 7 15 VB+ - Back light
(+5V) 16 VB- - Back light
Tabel 4 menjelaskan deskripsi dari masing - masing pin LCD 2x16 yang digunakan untuk menampilkan data yang diperoleh dari pengukuran sebuah obyek.
1.5. Motor DC
Motor DC merupakan peralatan elektromekanik dasar yang berfungsi untuk mengubah tenaga listrik menjadi tenaga mekanik. Secara umum, kecepatan putaran poros motor DC akan meningkat seiring dengan meningkatnya tegangan yang diberikan. Dengan demikian, putaran motor DC akan berbalik arah jika polaritas tegangan yang diberikan juga dirubah.
Gambar 8. Motor DC
Motor gear DC tidak dapat dikendalikan langsung oleh mikrokontroler, karena kebutuhan arus yang besar sedangkan keluaran arus dari mikrokontroler sangat kecil. Motor driver merupakan alternatif yang dapat digunakan untuk menggerakkan motor DC.
1.6. Driver Motor L298
L298 adalah IC yang dapat digunakan sebagai driver motor DC. IC ini menggunakan prinsip kerja H-Bridge. Tiap H-Bridge dikontrol menggunakan level tegangan yang berasal dari output mikrokontroler. L298 dapat mengontrol 2 buah motor DC. Tegangan yang dapat digunakan bisa mencapai tegangan 46 VDC dan arus 5 A untuk setiap kanalnya. Berikut ini bentuk IC L298 yang digunakan sebagai motor driver.
Gambar 9. IC Driver Motor L298
2. METODE PENELITIAN
Penulis menggunakan beberapa metode penelitian untuk mengarahkan penelitian (perancangan) ini agar tujuan penelitian yang telah ditentukan dapat tercapai Bahan – bahan yang digunakan untuk membuat sistem ini sebagai berikut :
a).Sensor LDR, digunakan untuk mendeteksi posisi matahari.
b).Panel surya, yang digunakan untuk merubah energi matahari menjadi energi listrik.
c).Mikrokontoler ATmega8535.
d).LCD 2x16, untuk menampilkan hasil pengukuran secara digital.
e).Motor DC sebagai penggerak posisi panel surya.
Flow Chart
Mulai
Pembuatan Proposal
Pengumpulan Data
Pembuatan Alat
Pengujian Alat
Apakah Alat Bekerja Dengan
Baik
Analisis Data
Selesai Ya
Perbaikan Alat Tidak
Gambar 10. Flowchart penelitian
3. HASIL PENELITIAN DAN ANALISA
1. Analisis atau Pembahasan Alat
Analisa dari perancangan alat yang akan diuji yaitu meliputi :
a). Analisis Rangkaian Power Supply.
Tabel 5. Pengukuran Keluaran Power Supply Tegangan
Input (Vi) DC
Tegangan Output (Vo) DC
Arus Keterangan
6 volt 4.8 volt 2.86 A
Tegangan
Arus Keterangan ATmega8535 b).Analisis Rangkaian Mikrokontroler AVR
ATmega8535.
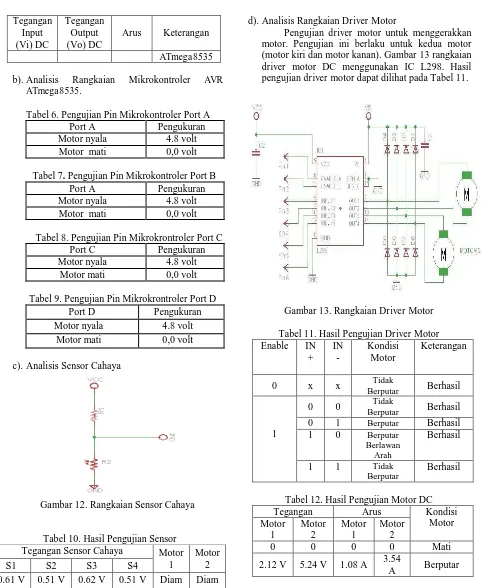
Tabel 6. Pengujian Pin Mikrokontroler Port A Port A Pengukuran Motor nyala 4.8 volt Motor mati 0,0 volt Tabel 7. Pengujian Pin Mikrokontroler Port B
Port A Pengukuran Motor nyala 4.8 volt Motor mati 0,0 volt Tabel 8. Pengujian Pin Mikrokrontroler Port C
Port C Pengukuran
c).Analisis Sensor Cahaya
Gambar 12. Rangkaian Sensor Cahaya
Tabel 10. Hasil Pengujian Sensor Tegangan Sensor Cahaya Motor
1
d).Analisis Rangkaian Driver Motor
Pengujian driver motor untuk menggerakkan motor. Pengujian ini berlaku untuk kedua motor (motor kiri dan motor kanan). Gambar 13 rangkaian driver motor DC menggunakan IC L298. Hasil pengujian driver motor dapat dilihat pada Tabel 11.
Gambar 13. Rangkaian Driver Motor Tabel 11. Hasil Pengujian Driver Motor Enable IN
Berputar Berhasil
1
0 0 Tidak
Berputar Berhasil
0 1 Berputar Berhasil
Tabel 12. Hasil Pengujian Motor DC Tegangan Arus Kondisi
Motor 2. Hasil Penelitian
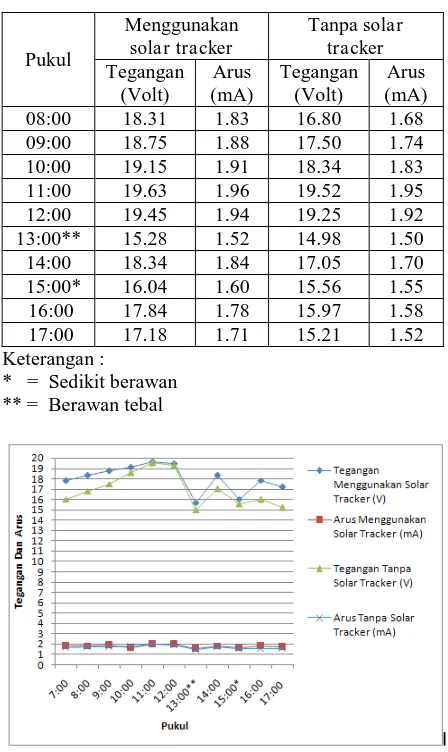
panel surya yang sejenis dengan selisih output tegangan kedua panel surya kurang lebih 0,4 Volt. Satu panel surya menggunakan solar tracker dan satu panel surya tanpa solar tracker yang menghadap tegak lurus keatas. Beban yang digunakan ketika
pengukuran berupa resistor bernilai 10KΩ. Hasil dari dua keadaan tersebut dapat dilihat pada Tabel 13 –
Gambar 14. Grafik Pengukuran Panel Surya Hari
Pertama
Tabel 14. Hasil Pengukuran Panel Surya Hari
Kedua
Gambar 15. Grafik Pengukuran Panel Surya Hari Kedua
Pukul
Gambar 16. Grafik Pengukuran Panel Surya Hari Ketiga
Dilihat dari Tabel 13 – Tabel 15 terjadi perbedaan output tegangan ataupun arus antara panel surya menggunakan solar tracker dan panel surya tanpa solar tracker. Tegangan ataupun arus yang dihasilkan panel surya menggunakan solar tracker akan memiliki nilai yang lebih besar dibandingkan dengan panel surya tanpa solar tracker.
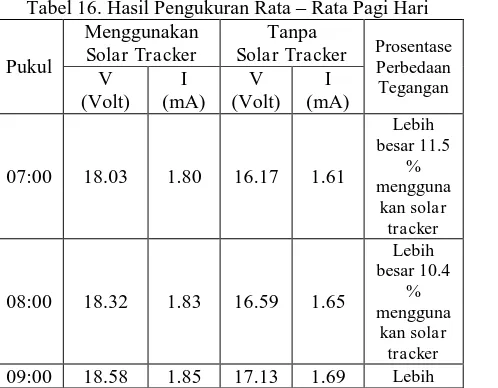
Nilai rata – rata keluaran panel surya selama tiga hari berdasarkan pembagian waktu pagi, siang dan sore hari dapat dilihat pada Tabel 16 – Tabel 18. Pagi hari dari pukul 07.00 – 10.00 , siang hari dari pukul 11.00 – 13.00, dan sore hari dari pukul 14.00 – 17.00.
Tabel 16. Hasil Pengukuran Rata – Rata Pagi Hari
Pukul
Menggunakan Solar Tracker
Tanpa
Solar Tracker Prosentase
Perbedaan
Solar Tracker Prosentase
Perbedaan
Gambar 17. Grafik Pengukuran Rata - Rata Pagi Hari
Tabel 17. Hasil Pengukuran Rata – Rata Siang Hari
Gambar 18. Grafik Pengukuran Rata - Rata Siang Hari
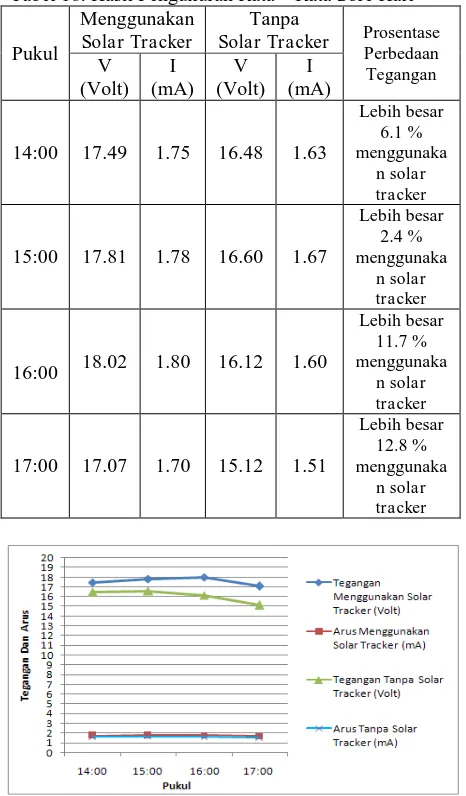
Tabel 18. Hasil Pengukuran Rata – Rata Sore Hari
Pukul
Menggunakan Solar Tracker
Tanpa
Solar Tracker Prosentase
Perbedaan
Gambar 19. Grafik Pengukuran Rata - Rata Sore Hari
Dari data Tabel 16 - 18 dapat dihitung besarnya prosentase tegangan antara panel surya menggunakan solar tracker dengan panel surya tanpa solar tracker.
a). Prosentase Tegangan Rata – Rata Pagi Hari
Panel surya dengan menggunakan solar tracker menghasilkan tegangan rata-rata sekitar 9.17 % pada pagi hari, 1.6 % pada siang hari dan 8.25 % sore hari lebih besar daripada panel surya tanpa solar tracker
.
4. KESIMPULAN
Dalam penelitian Tugas Akhir, Penulis dapat mengambil kesimpulan sebagai berikut :
1.Telah terbentuk sebuah alat solar tracker untuk menggerakan panel surya mengikuti arah matahari menggunakan sensor LDR dan berbasis mikrokontroler ATmega8535 dengan tampilan LCD sebagai penunjuk nilai tegangan dan arus panel surya.
2.Dari hasil pengujian selama tiga hari diperoleh data bahwa panel surya menggunakan solar tracker menghasilkan prosentase tegangan rata-rata lebih besar 9.17 % pada pagi hari (pukul 07.00 – 10.00),dan sore hari (pukul 14.00 – 17.00) menghasilkan tegangan rata – rata lebih besar 8.25 % dibandingkan dengan panel surya tanpa solar tracker. Sedangkan siang hari (pukul 11.00 – 13.00) tegangan antara panel surya menggunakan solar tracker dengan panel surya tanpa solar tracker relatif sama, dimana panel surya menggunakan solar tracker hanya menghasilkan tegangan rata – rata lebih besar 1.6 %.
DAFTAR PUSTAKA
Andrianto, Heri. 2008. Pemrograman Mikrokontroler AVR ATmega8535. Informatika. Bandung. Arif, Masyuri Aliansyah. 2011. Penjejak Arah Sinar
Matahari Untuk Panel Surya Berbasis Mikrokontroler AT89S51.
http://karya-ilmiah.um.ac.id/index.php/TA-elektro/article/view/13587 (12 januari 2012, 10.00 WIB)
http://www.books.google.co.id/books?id=lYc53x ZyxZQC&printsec=frontcover&dq=Solar+Electri city (2 januari 2012, 16.00 WIB)
Purnama, Mahir. 2011. Hybrid Sistem Pembangkit Lstrik Tenaga Surya Dengan Jala -Jala Listrik PLN Untuk Instalasi Rumah Tangga.
Skripsi. Fakultas Teknik UMS.
Solichin, Achmad. 2003. Pemrograman Bahasa C. ANDI. Yogyakarta.
Susilo, Danang. 2010. Penjejak Matahari Berbasis Sensor.
http://repo.eepis-edu/333/ (2 januari 2012, 16.00 WIB)