32 BAB IV
PENGUJIAN SISTEM DAN ANALISIS
Bab ini akan menjelaskan mengenai hasil pengujian alat dan kemudian dilakukan analisis dari hasil pengujian. Pengujian ini bertujuan untuk mengetahui bagaimana alat bekerja dan tingkat keberhasilan alat sesuai dengan spesifikasi yang telah ditentukan.
4.1. Pengujian Rangkaian Sensor Tegangan ZMPT101B
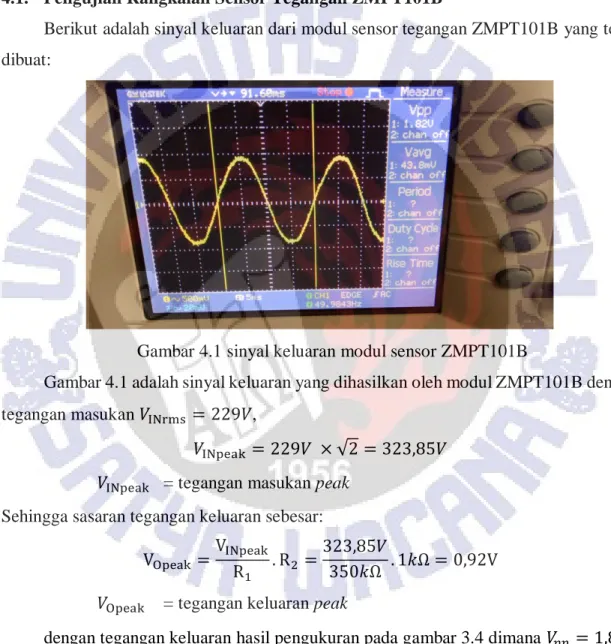
Berikut adalah sinyal keluaran dari modul sensor tegangan ZMPT101B yang telah dibuat:
Gambar 4.1 sinyal keluaran modul sensor ZMPT101B
Gambar 4.1 adalah sinyal keluaran yang dihasilkan oleh modul ZMPT101B dengan tegangan masukan 𝑉INrms = 229𝑉,
𝑉INpeak= 229𝑉 × √2 = 323,85𝑉 𝑉INpeak = tegangan masukan peak
Sehingga sasaran tegangan keluaran sebesar: VOpeak =VINpeak
R1 . R2 =
323,85𝑉
350𝑘Ω . 1𝑘Ω = 0,92V 𝑉Opeak = tegangan keluaran peak
dengan tegangan keluaran hasil pengukuran pada gambar 3.4 dimana 𝑉𝑝𝑝 = 1,82𝑉 dan 𝑓 = ±50𝐻𝑧, modul sensor tegangan yang dibuat sudah sesuai dengan perbandingan tegangan masukan dan keluaran sebesar :
323,85 0,92 :
0,92 0,92 352 ∶ 1
33
4.2. Pengujian Pembacaan Sensor Tegangan ZMPT101B
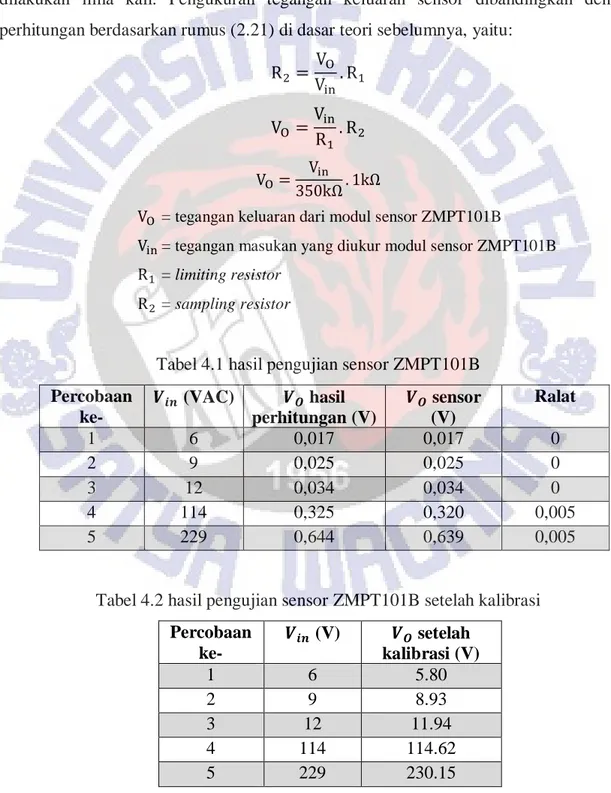
Pengujian sensor tegangan ZMPT101B dilakukan dengan memberi tegangan masukkan yang bervariasi menggunakan trafo 500mA dengan sumber listrik 1 fase. Pengukuran tegangan keluaran sensor diukur dengan alat ukur multimeter GW INSTEK GDM-360. Waktu arduino menyelesaikan satu kali perhitungan pengukuran tegangan dari ketiga fase diukur menggunakan aplikasi stopwatch pada smartphone, dan percobaan dilakukan lima kali. Pengukuran tegangan keluaran sensor dibandingkan dengan perhitungan berdasarkan rumus (2.21) di dasar teori sebelumnya, yaitu:
R2 = VO Vin. R1 VO = Vin R1 . R2 VO= Vin 350kΩ. 1kΩ
VO = tegangan keluaran dari modul sensor ZMPT101B
Vin = tegangan masukan yang diukur modul sensor ZMPT101B
R1 = limiting resistor
R2 = sampling resistor
Tabel 4.1 hasil pengujian sensor ZMPT101B Percobaan ke- 𝑽𝒊𝒏 (VAC) 𝑽𝑶 hasil perhitungan (V) 𝑽𝑶 sensor (V) Ralat 1 6 0,017 0,017 0 2 9 0,025 0,025 0 3 12 0,034 0,034 0 4 114 0,325 0,320 0,005 5 229 0,644 0,639 0,005
Tabel 4.2 hasil pengujian sensor ZMPT101B setelah kalibrasi Percobaan ke- 𝑽𝒊𝒏 (V) 𝑽𝑶 setelah kalibrasi (V) 1 6 5.80 2 9 8.93 3 12 11.94 4 114 114.62 5 229 230.15
34
Berdasarkan Tabel 4.2, untuk keluaran sensor sebelum dikalibrasi sudah sesuai dengan yang penulis harapkan. Ralat maksimal dari Tabel 4.2 adalah:
𝑟𝑎𝑙𝑎𝑡 𝑚𝑎𝑘𝑠𝑖𝑚𝑎𝑙 = 0,005
0.644× 100% 𝑟𝑎𝑙𝑎𝑡 𝑚𝑎𝑘𝑠𝑖𝑚𝑎𝑙 = 0.77%
Semakin besar tegangan yang diukur, maka ralat yang dihasilkan semakin besar. Hal tersebut dikarenakan oleh nilai resistor yang masih memiliki ralat.
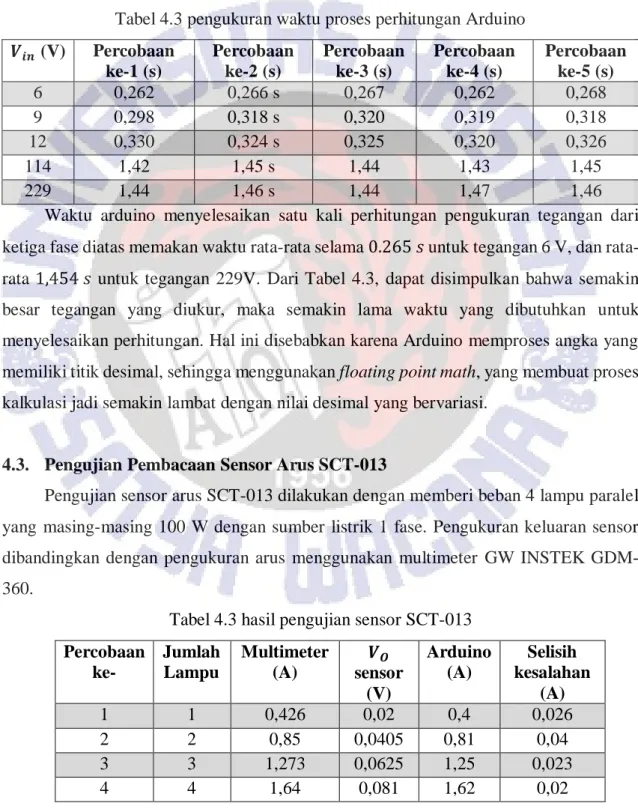
Tabel 4.3 pengukuran waktu proses perhitungan Arduino 𝑽𝒊𝒏 (V) Percobaan ke-1 (s) Percobaan ke-2 (s) Percobaan ke-3 (s) Percobaan ke-4 (s) Percobaan ke-5 (s) 6 0,262 0,266 s 0,267 0,262 0,268 9 0,298 0,318 s 0,320 0,319 0,318 12 0,330 0,324 s 0,325 0,320 0,326 114 1,42 1,45 s 1,44 1,43 1,45 229 1,44 1,46 s 1,44 1,47 1,46
Waktu arduino menyelesaikan satu kali perhitungan pengukuran tegangan dari ketiga fase diatas memakan waktu rata selama 0.265 𝑠 untuk tegangan 6 V, dan rata-rata 1,454 𝑠 untuk tegangan 229V. Dari Tabel 4.3, dapat disimpulkan bahwa semakin besar tegangan yang diukur, maka semakin lama waktu yang dibutuhkan untuk menyelesaikan perhitungan. Hal ini disebabkan karena Arduino memproses angka yang memiliki titik desimal, sehingga menggunakan floating point math, yang membuat proses kalkulasi jadi semakin lambat dengan nilai desimal yang bervariasi.
4.3. Pengujian Pembacaan Sensor Arus SCT-013
Pengujian sensor arus SCT-013 dilakukan dengan memberi beban 4 lampu paralel yang masing-masing 100 W dengan sumber listrik 1 fase. Pengukuran keluaran sensor dibandingkan dengan pengukuran arus menggunakan multimeter GW INSTEK GDM-360.
Tabel 4.3 hasil pengujian sensor SCT-013 Percobaan ke- Jumlah Lampu Multimeter (A) 𝑽𝑶 sensor (V) Arduino (A) Selisih kesalahan (A) 1 1 0,426 0,02 0,4 0,026 2 2 0,85 0,0405 0,81 0,04 3 3 1,273 0,0625 1,25 0,023 4 4 1,64 0,081 1,62 0,02
35
𝑠𝑒𝑙𝑖𝑠𝑖ℎ 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑟𝑎𝑡𝑎 − 𝑟𝑎𝑡𝑎 =0,026 + 0,04 + 0,023 + 0,02
4 = 0,027
Hasil pengukuran arus pada Tabel 4.3 menjelaskan bahwa nilai rata-rata dari selisih kesalahan pengukuran sebesar 0,027. Hal ini dikarenakan sensor SCT-013 memiliki perbandingan keluaran 20A:1V, sehingga ralat akan semakin kecil ketika mengukur arus yang cukup besar. Seperti halnya pada tugas akhir ini, akan mengukur arus ±20A untuk 1 mesin forming.
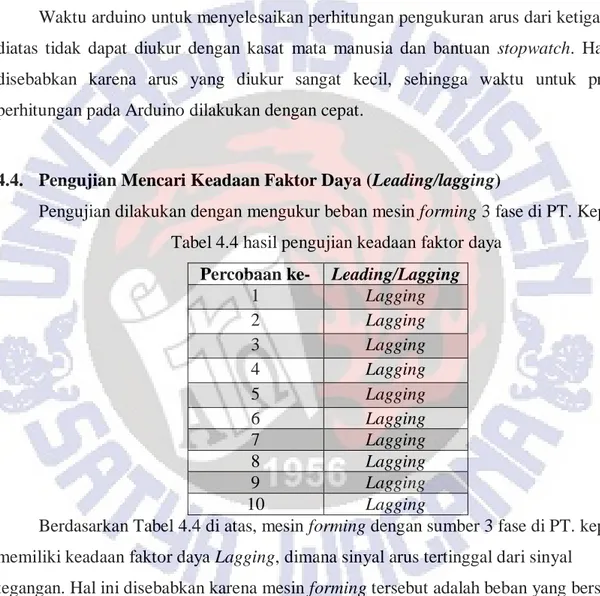
Waktu arduino untuk menyelesaikan perhitungan pengukuran arus dari ketiga fase diatas tidak dapat diukur dengan kasat mata manusia dan bantuan stopwatch. Hal ini disebabkan karena arus yang diukur sangat kecil, sehingga waktu untuk proses perhitungan pada Arduino dilakukan dengan cepat.
4.4. Pengujian Mencari Keadaan Faktor Daya (Leading/lagging)
Pengujian dilakukan dengan mengukur beban mesin forming 3 fase di PT. Kepuh. Tabel 4.4 hasil pengujian keadaan faktor daya
Percobaan ke- Leading/Lagging
1 Lagging 2 Lagging 3 Lagging 4 Lagging 5 Lagging 6 Lagging 7 Lagging 8 Lagging 9 Lagging 10 Lagging
Berdasarkan Tabel 4.4 di atas, mesin forming dengan sumber 3 fase di PT. kepuh memiliki keadaan faktor daya Lagging, dimana sinyal arus tertinggal dari sinyal
tegangan. Hal ini disebabkan karena mesin forming tersebut adalah beban yang bersifat induktif.
36
4.5. Pengujian Metode Perhitungan 𝑽𝒓𝒎𝒔 dan 𝑰𝒓𝒎𝒔
Pengujian pengukuran 𝑉𝑟𝑚𝑠 dan 𝐼𝑟𝑚𝑠 pada mesin forming 3 fase dilakukan dengan membandingkan nilai hasil perhitungan Arduino UNO dan hasil pengukuran powerlogic PM750.
Gambar 4.2 grafik perbandingan pengukuran tegangan fase 1
Gambar 4.3 grafik perbandingan pengukuran tegangan fase 2 150 170 190 210 230 250 1 2 3 4 5 6 7 8 9 10 Te ga ng an (v ol t) percobaan
ke-FASE 1
voltage PM750 voltage Arduino
150 170 190 210 230 250 1 2 3 4 5 6 7 8 9 10 Te ga ng an (v ol t) percobaan
ke-FASE 2
37
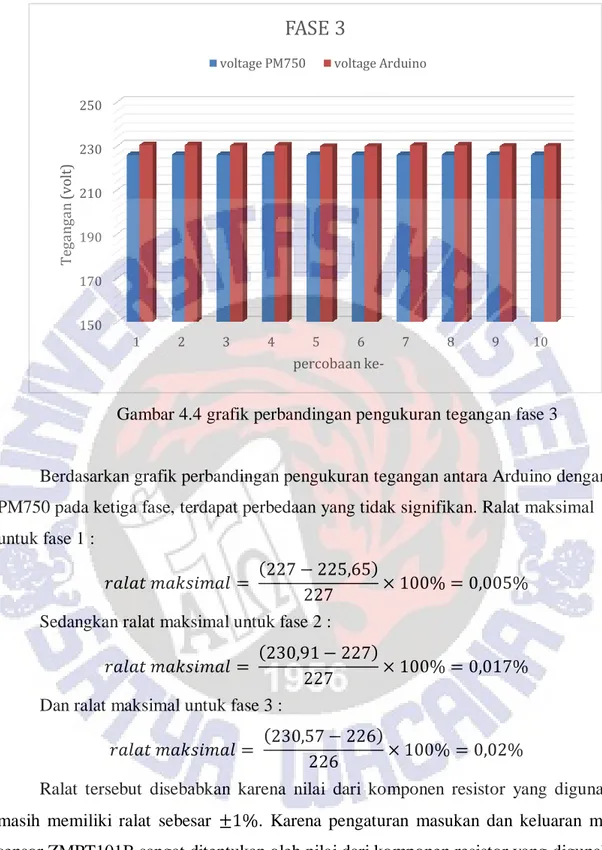
Gambar 4.4 grafik perbandingan pengukuran tegangan fase 3
Berdasarkan grafik perbandingan pengukuran tegangan antara Arduino dengan PM750 pada ketiga fase, terdapat perbedaan yang tidak signifikan. Ralat maksimal untuk fase 1 :
𝑟𝑎𝑙𝑎𝑡 𝑚𝑎𝑘𝑠𝑖𝑚𝑎𝑙 = (227 − 225,65)
227 × 100% = 0,005% Sedangkan ralat maksimal untuk fase 2 :
𝑟𝑎𝑙𝑎𝑡 𝑚𝑎𝑘𝑠𝑖𝑚𝑎𝑙 = (230,91 − 227)
227 × 100% = 0,017% Dan ralat maksimal untuk fase 3 :
𝑟𝑎𝑙𝑎𝑡 𝑚𝑎𝑘𝑠𝑖𝑚𝑎𝑙 = (230,57 − 226)
226 × 100% = 0,02%
Ralat tersebut disebabkan karena nilai dari komponen resistor yang digunakan, masih memiliki ralat sebesar ±1%. Karena pengaturan masukan dan keluaran modul sensor ZMPT101B sangat ditentukan oleh nilai dari komponen resistor yang digunakan.
150 170 190 210 230 250 1 2 3 4 5 6 7 8 9 10 Te ga ng an (v ol t) percobaan
ke-FASE 3
38
Table 4.5 Pengujian pengukuran 𝐼𝑟𝑚𝑠 dengan beban mesin forming 3 fase Percobaan
Ke-
PM750 (A) Arduino (A)
Fase 1 Fase 2 Fase 3 Fase 1 Fase 2 Fase 3
1. 5 5 5 5,71 5,72 5,73 2. 5 5 5 5.69 5,74 5,69 3. 5 5 5 5,68 5,72 5,70 4. 5 5 5 5,70 5,70 5,70 5. 5 5 5 5,71 5,72 5,69 6. 5 5 5 5,70 5,71 5,71 7. 5 5 5 5,67 5,71 5,73 8. 5 5 5 5,69 5,69 5,69 9. 5 5 5 5,69 5,73 5,68 10. 5 5 5 5,71 5,72 5,70
Hasil pengukuran pada Tabel 4.5 menunjukkan perbedaan nilai arus yang cukup besar antara keluaran PM750 dan Arduino. Hal ini disebabkan karena nilai yang tertera pada display PM750 tidak menggunakan angka dibelakang koma, sehingga tidak bisa mengetahui nilai sebenarnya. Namun pembenaran ini tetap akan dibuktikan dengan hasil perhitungan energi dimana nilai arus sangat mempengaruhi besar nilai energi.
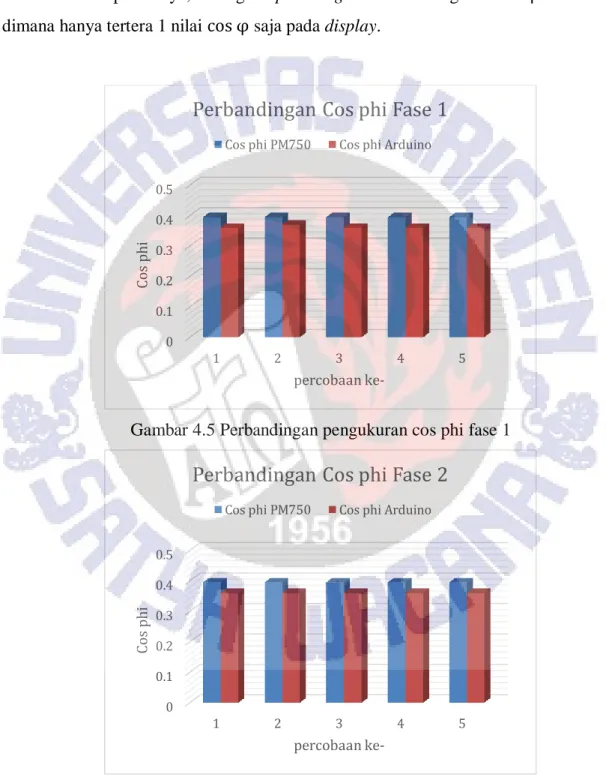
39 4.6. Pengujian Metode Perhitungan 𝑪𝒐𝒔 𝝋
Pengujian metode perhitungan cos φ pada mesin forming 3 fase dilakukan dengan membandingkan nilai hasil perhitungan Arduino UNO dan hasil pengukuran powerlogic PM750. Perlu diketahui bahwa metode pengukuran cos φ pada tugas akhir ini,
dilakukan di tiap fase nya, sedangkan powerlogic PM750 mengukur cos φ keseluruhan, dimana hanya tertera 1 nilai cos φ saja pada display.
Gambar 4.5 Perbandingan pengukuran cos phi fase 1
Gambar 4.6 Perbandingan pengukuran cos phi fase 2 0 0.1 0.2 0.3 0.4 0.5 1 2 3 4 5 Co s ph i percobaan
ke-Perbandingan Cos phi Fase 1
Cos phi PM750 Cos phi Arduino0 0.1 0.2 0.3 0.4 0.5 1 2 3 4 5 Co s ph i percobaan
ke-Perbandingan Cos phi Fase 2
Cos phi PM750 Cos phi Arduino40
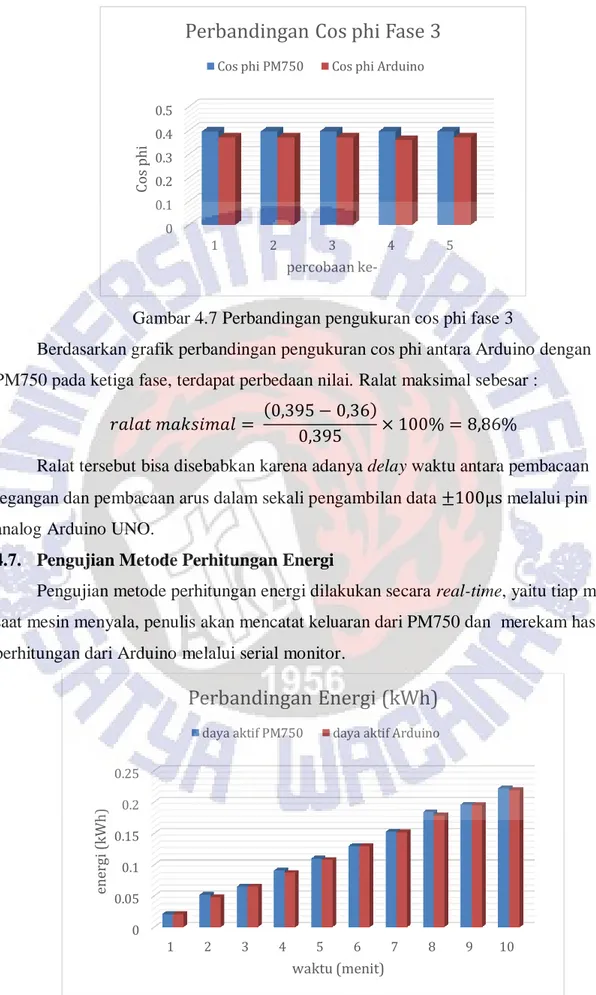
Gambar 4.7 Perbandingan pengukuran cos phi fase 3
Berdasarkan grafik perbandingan pengukuran cos phi antara Arduino dengan PM750 pada ketiga fase, terdapat perbedaan nilai. Ralat maksimal sebesar :
𝑟𝑎𝑙𝑎𝑡 𝑚𝑎𝑘𝑠𝑖𝑚𝑎𝑙 = (0,395 − 0,36)
0,395 × 100% = 8,86%
Ralat tersebut bisa disebabkan karena adanya delay waktu antara pembacaan tegangan dan pembacaan arus dalam sekali pengambilan data ±100μs melalui pin analog Arduino UNO.
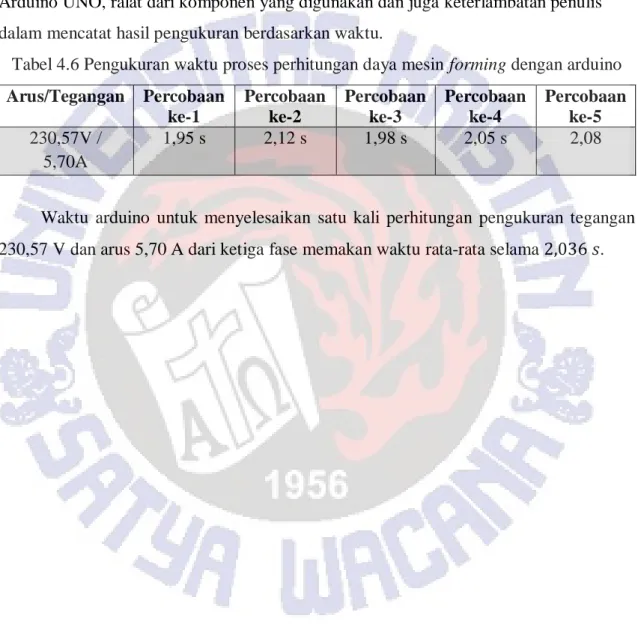
4.7. Pengujian Metode Perhitungan Energi
Pengujian metode perhitungan energi dilakukan secara real-time, yaitu tiap menit saat mesin menyala, penulis akan mencatat keluaran dari PM750 dan merekam hasil perhitungan dari Arduino melalui serial monitor.
Gambar 4.8 Perbandingan pengukuran energi (kWh) 0 0.1 0.2 0.3 0.4 0.5 1 2 3 4 5 Co s ph i percobaan
ke-Perbandingan Cos phi Fase 3
Cos phi PM750 Cos phi Arduino0 0.05 0.1 0.15 0.2 0.25 1 2 3 4 5 6 7 8 9 10 en er gi (kW h) waktu (menit)
Perbandingan Energi (kWh)
daya aktif PM750 daya aktif Arduino41
Berdasarkan Gambar 4.8 ralat terbesar dari kedua hasil pengukuran adalah : 𝑟𝑎𝑙𝑎𝑡 𝑚𝑎𝑘𝑠𝑖𝑚𝑎𝑙 = (0,052 − 0,048)
0,052 × 100% = 7,7%
Hal ini bisa disebabkan karena adanya delay waktu antara pembacaan tegangan dan pembacaan arus dalam sekali pengambilan data ±100μs melalui pin analog Arduino UNO, ralat dari komponen yang digunakan dan juga keterlambatan penulis dalam mencatat hasil pengukuran berdasarkan waktu.
Tabel 4.6 Pengukuran waktu proses perhitungan daya mesin forming dengan arduino Arus/Tegangan Percobaan ke-1 Percobaan ke-2 Percobaan ke-3 Percobaan ke-4 Percobaan ke-5 230,57V / 5,70A 1,95 s 2,12 s 1,98 s 2,05 s 2,08
Waktu arduino untuk menyelesaikan satu kali perhitungan pengukuran tegangan 230,57 V dan arus 5,70 A dari ketiga fase memakan waktu rata-rata selama 2,036 𝑠.