i
TUGAS AKHIR - TF141581PENGEMBANGAN PERANCANGAN SISTEM
PENGAMBILAN KEPUTUSAN BERBASIS DATA
AUTOMATIC IDENTIFICATION SYSTEM (AIS)
DAN
RADAR
UNTUK
IDENTIFIKASI
TERJADINYA
ILLEGAL
TRANSHIPMENT
MENGGUNAKAN LOGIKA FUZZY
KRISANDI PUTRA SITUMORANGNRP. 2413 100 110 Dosen Pembimbing
Prof.Dr.Ir. Aulia Siti Aisjah, M.T. Dr. Ir. A. A. Masroeri, M. Eng DEPARTEMEN TEKNIK FISIKA Fakultas Teknologi Industri
Institut Teknologi Sepuluh Nopember Surabaya, 2017
ii
iii
FINAL PROJECT - TF141581DEVELOPMENT OF DECISION SUPPORT
SYSTEM
BASED
ON
AUTOMATIC
IDENTIFICATION SYSTEM (AIS) AND RADAR
FOR
ILLEGAL
TRANSHIPMENT
IDENTIFICATION USING FUZZY LOGIC
KRISANDI PUTRA SITUMORANGNRP. 2413 100 110 Supervisor
Prof.Dr.Ir. Aulia Siti Aisjah, M.T. Dr. Ir. A. A. Masroeri, M. Eng
DEPARTMENT OF ENGINEERING PHYSICS Faculty of Industrial Technology
Sepuluh Nopember Institute of Technology Surabaya, 2017
iv
vi
viii
x
xi
PENGEMBANGAN PERANCANGAN SISTEM PENGAMBILAN KEPUTUSAN BERBASIS DATA
AUTOMATIC IDENTIFICATION SYSTEM (AIS) DAN
RADAR UNTUK IDENTIFIKASI TERJADINYA ILLEGAL
TRANSHIPMENT MENGGUNAKAN LOGIKA FUZZY
Nama : Krisandi Putra Situmorang
NRP : 2413100110
Departemen : Teknik Fisika, FTI - ITS
Pembimbing I : Prof. Dr. Ir. Aulia Siti Aisjah, M.T. Pembimbing II :
Dr. Ir. A. A. Masroeri, M.Eng
Abstrak
Setiap tahun sektor kelautan Indonesia mengalami kerugian akibat adanya praktik illegal transhipment. Illegal transhipment adalah proses pemindahan muatan dari satu kapal ke kapal lainnya yang dilakukan di tengah laut. Upaya pengawasan terhadap praktik illegal transhipment dinilai kurang optimal karena keterbatasan instrumen yang dimiliki Indonesia. Penelitian pada tugas akhir ini, dilakukan pengembangan perancangan sistem pengambilan keputusan menggunakan logika fuzzy berbasis data AIS dan radar untuk identifikasi terjadinya illegal transhipment. Pengembangan dilakukan dengan menambahkan variabel masukan, membangun kaidah yang baru, dan mengubah beberapa membership function pada sistem. Sistem pengambilan keputusan disimulasikan, diuji, dan divalidasi. Validasi dilakukan dengan menggunakan data kapal real yang melakukan illegal transhipment dari pusat data www.marinetraffic.com. Hasil validasi menunjukkan akurasi identifikasi illegal transhipment sebesar 83,075%, dan sistem mampu mengidentifikasi lebih banyak pola illegal transhipment. Kata Kunci: AIS, illegal transhipment, logika fuzzy,
pengembangan, radar
xii
xiii
DEVELOPMENT OF DECISION SUPPORT SYSTEM
BASED ON AUTOMATIC IDENTIFICATION SYSTEM
(AIS) AND RADAR FOR ILLEGAL TRANSHIPMENT
IDENTIFICATION USING FUZZY LOGIC
Name
:
Krisandi Putra SitumorangNRP
:
2413100110Department
: Engineering Physics, FTI - ITS
Supervisor I
: Prof. Dr. Ir. Aulia Siti Aisjah, MT
Supervisor II
: Dr. Ir. A. A. Masroeri, M.Eng
Abstract
Every year Indonesia’s marine sector suffers losses due to
illegal transhipment practices. Illegal transhipment is the process
of transferring cargo from one ship to another ship conducted in the middle of the sea. Monitoring efforts on illegal transhipment practices are no less optimal because of the limitations of instruments owned by Indonesia. Research on this thesis, is done by develop system of fuzzy logic based AIS data and radar for identification of illegal transaction. The development is done by adding input variables, building new rules, and changing some membership functions on the system. The new system have been through simulation, testing, and validation. Validation is done using real data of ship that perform illegal transhipment from
www.marinetraffic.com. Validation results indicate the accuracy of illegal transhipment identification of 83.075%, and the system is
able to produce more illegal transhipment patterns.
Keywords: AIS, development, fuzzy logic, illegal transhipment,
xiv
xv
KATA PENGANTAR
Puji syukur penulis haturkan kehadirat Tuhan Yang Maha Esa atas segala rahmat dan anugerah-Nya sehingga penulis dapat menyelesaikan Tugas Akhir beserta pembuatan laporan yang berjudul :
PENGEMBANGAN PERANCANGAN SISTEM PENGAMBILAN KEPUTUSAN BERBASIS DATA
AUTOMATIC IDENTIFICATION SYSTEM (AIS) DAN
RADAR UNTUK IDENTIFIKASI TERJADINYA ILLEGAL
TRANSHIPMENT MENGGUNAKAN LOGIKA FUZZY
Tugas akhir ini disusun untuk memenuhi persyaratan bagi seorang mahasiswa untuk memperoleh gelar Sarjana Teknik pada Departemen Teknik Fisika, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember Surabaya.
Dalam kesempatan kali ini penulis menyampaikan terima kasih kepada semua pihak yang telah banyak membantu hingga terselesainya laporan Tugas Akhir ini, khususnya kepada :
1.
Bapak Agus Muhamad Hatta, S.T., M.Si., Ph.D selaku ketua Departemen Teknik Fisika, FTI – ITS.2.
Kardi Situmorang (Ayah), Risma Sitorus (Ibu), Maria Ronauli Situmorang (Kakak) selaku keluarga penulis yang tiada hentinya memberikan doa, semangat, serta motivasi kepada penulis dalam pengerjaan tugas akhir.3.
Ibu Prof. Dr. Ir. Aulia Siti Aisjah, M.T. dan Bapak Dr. Ir. A. A. Masroeri, M.Eng selaku dosen pembimbing tugas akhir yang selalu mengarahkan dan membimbing penulis dalam pengerjaan tugas akhir.4.
Bapak Totok Ruki Biyanto, S.T., M.T., Ph.D selaku dosen wali dan kepala Laboratorium Rekayasa Instrumentasi yang memberi motivasi kepada penulis selama menjadi mahasiswa di Departemen Teknik Fisika.xvi
5.
Seluruh teman Tugas Akhir (Moo,Prisma,Dany,Sonya, Sari, Nuri), terima kasih untuk semua kerja sama dan kebersamaannya.6.
Seluruh karyawan, dan civitas akademik Teknik Fisika, terimakasih atas segala bantuan dan kerjasamanya.7.
Semua pihak yang tidak dapat disebutkan satu persatu,terimakasih atas bantuannya.
Penulis sangat menyadari bahwa laporan Tugas Akhir ini masih terdapat kekurangan. Oleh karena itu kritik dan saran yang membangun sangat dibutuhkan untuk menyempurnakan laporan Tugas Akhir ini. Salam Satu Bendera.. Vivat TF!
Surabaya, Juli 2017 Penulis
xvii
DAFTAR ISIAbstrak ... xi
Abstract ... xiii
KATA PENGANTAR ... xv
DAFTAR ISI ... xvii
DAFTAR GAMBAR ... xix
DAFTAR TABEL ... xxi
BAB I ... 1 PENDAHULUAN ... 1 1.1. Latar Belakang ... 1 1.2. Rumusan Masalah ... 3 1.3. Batasan Masalah ... 3 1.4. Tujuan Penelitian ... 3 1.5. Manfaat Penelitian ... 4 BAB II ... 5 TINJAUAN PUSTAKA ... 5 2.1 Teknologi AIS ... 5 2.2 Radar Laut ... 8
2.3 Dinamika Gerak Kapal ... 12
2.4 Illegal transhipment ... 13
2.5 Collision Regulation ... 15
2.6 Sistem Logika Fuzzy ... 17
BAB III ... 19
METODE PENELITIAN ... 19
3.1 Studi Literatur ... 20
3.2 Analisis Perancangan Sistem pada Penelitian Sebelumnya 20 3.3 Identifikasi Masalah ... 21
3.4 Pengumpulan Data ... 22
3.5 Pengembangan Perancangan Sistem Pengambilan Keputusan dengan Fuzzy ... 24
3.5.1 Sistem Fuzzy Selection ... 26
3.5.1 Sistem Fuzzy Decision ... 34
3.6 Simulasi dan uji sistem ... 46
3.6.1 Simulasi Pola Trayektori ke-1 ... 46
3.6.2 Simulasi Pola Trayektori ke-2 ... 46
3.6.3 Simulasi Pola Trayektori ke-3 ... 47
3.6.4 Simulasi Pola Trayektori ke-4 ... 47
3.7 Validasi ... 48
xviii
ANALISIS DATA DAN PEMBAHASAN ... 51
4.1 Analisis Rules ... 51
4.2 Analisis Hasil Uji Sistem dengan Berbagai Pola Pergerakan 2 Kapal (Data yang lama) ... 52
4.2.1 Analisis Pengujian Pola Transhipent ke-1 ... 53
4.2.2 Analisis Pengujian Pola Transhipent ke-2 ... 56
4.3 Analisis Hasil Uji Sistem dengan Berbagai Pola Pergerakan 2 Kapal ... 59
4.3.1 Analisis Pengujian Pola Transhipment ke-1 ... 59
4.3.2 Analisis Pengujian Pola Transhipment ke-2 ... 63
4.3.3 Analisis Pengujian Pola Transhipment ke-3 ... 66
4.3.4 Analisis Pengujian Pola Transhipment ke-4 ... 70
4.2 Validasi ... 74
4.2.1 Validasi Sistem Pengambilan Keputusan Menggunakan Data Real Kapal Transhipment BumYoung di Pelabuhan Bitung ... 75
4.2.2 Validasi Sistem Pengambilan Keputusan Menggunakan Data Real Kapal Transhipment (Eagle Seville & Lurongyuanyu 105) di Perairan Batam ... 79
BAB V ... 83
KESIMPULAN DAN SARAN ... 83
5.1 Kesimpulan ... 83 5.2 Saran... 83 DAFTAR PUSTAKA ... 85 LAMPIRAN A1 ... 87 LAMPIRAN A2 ... 89 LAMPIRAN B ... 92 LAMPIRAN C ... 94 LAMPIRAN D ... 98
xix
DAFTAR GAMBAR
Gambar 2. 1 Prinsip Kerja AIS (Kaikyo & Advisory, 2008) ... 6
Gambar 2. 2 Human Interface Radar Laut (kiri) dan Radar Laut(kanan) (Friedman, 1981) ... 9
Gambar 2. 3 Dinamika Gerak Kapal (Fossen, 1994) ... 12
Gambar 2. 4 Illustrasi illegal transhipment muatan ikan (Jean-Pierre, 2010) ... 14
Gambar 2. 5(a) Head On (b) Crossing (c) Overtake (Lokukaluge, 2011) ... 16
Gambar 2. 6 Sistematika Penyusunan Logika Fuzzy (Kayacan, 2016) . 17 Gambar 3. 1 Diagram Alir Penelitian... 19
Gambar 3. 2 Desain Sistem Pengambilan Keputusan Pada ... 21
Gambar 3. 3 Diagram Perancangan Sistem Fuzzy ... 24
Gambar 3. 4 Desain Sistem Pengambilan Keputusan ... 25
Gambar 3. 5 Sistem Fuzzy Selection ... 27
Gambar 3. 6 FIS Sistem Fuzzy Selection ... 28
Gambar 3. 7 Himpunan Keanggotaan Masukan Jarak ... 29
Gambar 3. 8 Illustrasi Jarak Waspada 2 Kapal ... 29
Gambar 3. 9 Himpunan Keanggotaan Masukan Heading ... 30
Gambar 3. 10 Illustrasi Heading Kapal ... 31
Gambar 3. 11 Himpunan Keanggotaan Keluaran Sistem Fuzzy Selection ... 32
Gambar 3. 12 Rule Viewer Sistem Fuzzy Selection ... 33
Gambar 3. 13 Surface Viewer Sistem Fuzzy Selection ... 34
Gambar 3. 14 Sistem Fuzzy Decision... 34
Gambar 3. 15 FIS Sistem Fuzzy Decision ... 35
Gambar 3. 16 Himpunan Keanggotaan Masukan Perubahan Jarak ... 37
Gambar 3. 17 Himpunan Keanggotaan Masukan Rate of Turn Kapal 1 &2 ... 38
Gambar 3. 18 Himpunan Keanggotaan Masukan Heading ... 39
Gambar 3. 19 Himpunan Keanggotaan Masukan Perubahan Kecepatan Kapal 1&2 ... 40
Gambar 3. 20 Himpunan Keanggotaan Masukan Selisih Kecepatan .... 41
Gambar 3. 21 Fungsi Keanggotaan Keluaran Sistem Fuzzy Decision .. 42
Gambar 3. 22 Rule Viewer Sistem Fuzzy Decision ... 43
Gambar 3. 23 Surface Viewer Sistem Fuzzy Decision 1 ... 44
Gambar 3. 24 Surface Viewer Sistem Fuzzy Decision 2 ... 44
Gambar 3. 25 Surface Viewer Sistem Fuzzy Decision 3 ... 45
xx
Gambar 4. 1 Rules pada Sistem Lama ... 52
Gambar 4. 2 Pola Pergerakan Kapal pada Uji Sistem ke-1 (data lama) 54 Gambar 4. 3 Pola Pergerakan Kapal pada Uji Sistem ke-2 (data lama) 58 Gambar 4. 4 Pola Pergerakan Kapal pada Uji Sistem ke-1 ... 61
Gambar 4. 5 Pola Pergerakan Kapal pada Uji Sistem ke-2 ... 65
Gambar 4. 6 Pola Pergerakan Kapal pada Uji Sistem ke-3 ... 69
Gambar 4. 7 Pola Pergerakan Kapal pada Uji Sistem ke-4 ... 73
Gambar 4. 8 Pola Pergerakan Kapal BumYoung ... 76
Gambar 4. 9 Grafik Kecepatan Kapal BumYoung ... 77
Gambar 4. 10 Pola Pergerakan Kapal Lurongyuanyu105 ... 80
xxi
DAFTAR TABEL
Tabel 2. 1 Jenis informasi dari AIS (Yudhistira, 2009) ... 7
Tabel 3. 1 Perbedaan Parameter Masukan pada Tahap Selection ... 25
Tabel 3. 2 Perbedaan Parameter Masukan pada Tahap Decision ... 25
Tabel 3. 3 Parameter Masukan Logika Fuzzy Selection ... 28
Tabel 3. 4 Parameter Masukan Logika Fuzzy Decision (Suncoko, 2017) ... 35
Tabel 4. 1 Data Lama Kapal 1 yang Dibangkitkan pada Uji Sistem ke-1 ... 53
Tabel 4. 2 Data Lama Kapal 1 yang Dibangkitkan pada Uji Sistem ke-2 ... 56
Tabel 4. 3 Data Lama Kapal 2 yang Dibangkitkan pada Uji Sistem ke-2 ... 57
Tabel 4. 4 Data Kapal 1 yang Dibangkitkan pada Uji Sistem ke-1 ... 60
Tabel 4. 5 Data Kapal 1 yang Dibangkitkan pada Uji Sistem ke-2 ... 63
Tabel 4. 6 Data Kapal 1 yang Dibangkitkan pada Uji Sistem ke-3 ... 67
Tabel 4. 7 Data Kapal 2 yang Dibangkitkan pada Uji Sistem ke-3 ... 68
Tabel 4. 8 Data Kapal 1 yang Dibangkitkan pada Uji Sistem ke-4 ... 71
Tabel 4. 9 Data Kapal 2 yang Dibangkitkan pada Uji Sistem ke-4 ... 72
Tabel 4. 10 Data Kapal BumYoung di pelabuhan Bitung pada Validasi Sistem ke-2... 75
Tabel 4. 11 Data Kapal Lurongyuanyu105 di perairan Batam pada Validasi Sistem ke-1 ... 79
xxii
1
1.1. Latar BelakangPosisi geografis maritim Indonesia memiliki potensi sekaligus kelemahan. Potensi terbesarnya adalah sumber daya yang ada di dalamnya, sedangkan kelemahannya adalah masalah perhubungan antar pulau-pulau serta masalah keamanan di daerah perbatasan terutama perbatasan laut. Praktik Illegal transhipment dalam hal operasi penangkapan ikan adalah pemindahan muatan ikan dari kapal-kapal penangkap ikan ke kapal pengumpul (collecting ship). Kapal collecting ini selanjutnya akan membawa seluruh ikan yang dikumpulkannya ke darat untuk diproses lebih lanjut (Nurcholis, 2015). Salah satu contoh praktik illegal transhipment terjadi pada 14 Juli 2015 dimana sebuah kapal berbendera Thailand bernama MV Silver Sea 2 diduga melakukan alih muatan (illegal transhipment) di laut Arafura dengan kapal milik Pusaka Benjina Resources yang merupakan perbuatan terlarang berdasarkan Peraturan Menteri Kelautan dan Perikanan Nomor 57 Tahun 2014. Siver Sea 2 juga tidak mempekerjakan anak buah kapal (ABK) lokal, semua ABK-nya adalah warga negara asing. Selain itu, kapal tersebut melanggar ketentuan mengenai pengangkutan ikan dari pelabuhan pangkalan yang ditunjuk karena Surat Izin Kapal Pengangkut Ikan (SIKPI) sudah mati sejak 25 Juni 2014 (Kemenkeu, 2016).
International Maritime Organization (IMO) membuat peraturan baru yang mewajibkan setiap kapal untuk memasang peralatan Automatis Identification System (AIS) pada tahun 2000. AIS merupakan sistem pelacakan kapal otomatis, digunakan pada kapal dan Stasiun Pantai untuk mengidentifikasi dan melacak kapal dengan menggunakan pengiriman data elektronik dengan kapal lainnya dan stasiun pantai terdekat. Informasi tentang identifikasi posisi, tujuan, dan kecepatan dapat ditampilkan pada layar
komputer atau ECDIS (Electronic Charts Display and Information System). AIS menyediakan informasi statis dan dinamis, informasi dinamis diperbarui setiap 2 sampai 10 detik tergantung pada kecepatan kapal dan informasi statis terdiri dari MMSI (Maritime Mobile Service Identify), IMO number, ships name, call sign, length and beam, type of ship, location of position-fixing antenna on the ship (Aisjah, A. S., 2011).
Pemerintah Indonesia selama ini memantau secara manual pergerakan kapal-kapal di perairan Indonesia dengan mengamati posisi kapal yang terlihat pada tampilan layar AIS melalui petugas yang berjaga di Stasiun Pantai. Belum adanya sistem yang mampu mengidentifikasi illegal transhipment menyebabkan sulitnya pemerintah memberantas praktik illegal transhipment di Indonesia. Informasi yang diperoleh dari AIS dapat digunakan untuk melakukan identifikasi terjadinya illegal transhipment. Gerakan-gerakan anomali kapal yaitu posisi dan jarak kapal satu dengan lainnya, heading yang tidak memenuhi aturan IMO tentang tabrakan, perubahan sudut yaw secara tiba-tiba, dan perubahan laju kapal yang diperoleh dari AIS dapat dijadikan indikasi kapal melakukan hal-hal yang patut dicurigai (Jean-Pierre, 2010).
Penelitian sebelumnya merancang sistem pengambilan keputusan berbasis data AIS untuk identifikasi terjadinya illegal transhipment menggunakan logika fuzzy dimana dipakai variabel masukan sebanyak tiga buah yaitu posisi, kecepatan , dan heading dari data AIS. Hasil yang didapatkan oleh sistem menunjukkan tingkat keakurasian masih dibawah 78% dan adanya beberapa pola kapal yang tidak terindentifikasi melakukan illegal transhipment . Hal ini menyebabkan perlu adanya pembangunan rule-rule yang berbeda dan penambahan variabel masukan sistem yang mampu menghasilkan sistem dengan keputusan illegal transhipment lebih dari 78% dan dapat mengidentifikasi lebih banyak variasi pola pergerakan kapal yang melakukan illegal transhipment. Oleh karena itu Tugas Akhir ini akan mengembangkan perancangan
sistem pengambilan keputusan berbasis data Automatic identification system (AIS) dan Radar untuk identifikasi terjadinya illegal transhipment menggunakan Logika Fuzzy.
1.2. Rumusan Masalah
Berdasarkan latar belakang diatas maka didapatkan beberapa permasalahan yang menjadi fokus ada penelitian ini diantaranya adalah:
1. Variabel masukan apa saja yang menentukan sistem pengambilan keputusan illegal transhipment?
2. Bagaimana membangun rule yang mampu menghasilkan keputusan illegal transhipment?
3. Apakah sistem identifikasi illegal transhipment yang dihasilkan mampu menghasilkan akurasi lebih dari 78%? 1.3. Batasan Masalah
Batasan masalah yang diberikan pada penelitian ini antara lain:
1. Data yang dipakai adalah data AIS Tipe A.
2. Data diperoleh merupakan data sekunder yang diperoleh dari pusat data website http://www.marinetraffic.com . 3. Parameter yang digunakan untuk identifikasi 2 kapal
Transhipment adalah dengan menggunakan pendekatan parameter ship collision.
4. Asumsi bahwa pada kapal yang akan melakukan illegal transhipment telah terpasang dan mengaktifkan peralatan Automatic identification system (AIS) atau terdeteksi radar.
5. Simulasi dilakukan dengan menggunakan bantuan software MatLab R2015
1.4. Tujuan Penelitian
Tujuan dari penelitian ini diantaranya adalah :
1. Menentukan variabel masukan sistem pengambilan keputusan illegal transhipment.
2. Mampu membangun rule yang menghasilkan keputusan Illegal transshipment.
3. Mengembangkan sistem identifikasi illegal transhipment yang memiliki akurasi lebih dari 78%.
1.5. Manfaat Penelitian
Manfaat dari penelitian tugas akhir ini adalah untuk merancang suatu sistem yang dapat mengidentifikasi terjadinya illegal transhipment antara 2 kapal berdasarkan data dari AIS dan Radar dengan menggunakan logika fuzzy.
5
2.1 Teknologi AISAutomatic identification system (AIS) adalah sebuah sistem komunikasi yang digunakan pada kapal dan Vessel Traffic Sevices (VTS) atau pelayaran lalu lintas kapal. AIS berfungsi untuk identifikasi lokasi tempat berlayarnya kapal, serta dapat menukar data secara elektronik termasuk identifikasi, posisi, kegiatan atau keadaan kapal, dan kecepatan, dengan kapal terdekat yang lainnya dan stasiun VTS. International Maritime Organization (IMO) dan International Convetion for the Safety of Life at Sea (SOLAS) mewajibkan penggunaan AIS pada pelayaran kapal internasional dengan Gross Tonnage (GT) lebih dari sama dengan 300 GT, dan semua kapal penumpang tanpa memperhatikan segala ukuran. AIS merupakan alat komunikasi otonomi antar kapal. Prinsip kerja dari AIS adalah setiap kapal mengirimkan data ke AIS kapal lain yang sudah dilengkapi AIS dalam jangkauan VHF (Prabawaningtyas, 2009).
AIS dibedakan menjadi dua, yaitu AIS kelas A dan kelas B. perbedaan dari keduanya hanya terletak pada informasi yang dapat dikirim ataupun diterima. AIS kelas A setiap tiga menit akan mengirimkan data data sebagai berikut:
a. MMSI number b. Navigation status c. Rate of turn d. Speed over ground e. Position accuracy f. Longitude
g. Time stamp
Setiap enam menit AIS akan mengirimkan data data sebagai berikut:
a. MMSI number b. IMO number
c. Radio call sign d. Name - Name of ship e. Type of ship/cargo f. Dimensions of ship
g. Location on ship where reference point for position reports is located
h. Type of position fixing device i. Draught of ship
j. Destination
k. Estimated time of Arrival at destination
AIS kelas B sama seperti kelas A di atas kecuali untuk beberapa hal, yaitu:
a. Informasi yang dikirim lebih jarang dari kelas A
b. Tidak mentransmisikan the vessel’s IMO number or call sign
c. Tidak mentransmisikan ETA atau destination d. Tidak mentransmisikan navigational status
e. Hanya digunakan untuk menerima, tidak mentransmisikan, text safety messages
f.Hanya digunakan untuk menerima, tidak mentransmisikan, application identifiers (binary messages)
g. Tidak mentransmisikan rate of turn information
h. Tidak mentransmisikan maximum present static draught
AIS kelas B biasanya digunakan pada kapal ikan karena memiliki berat kurang dari 20 GT dan harganya tidak terlalu mahal (Yudhistira, 2009).
Prinsip kerja AIS ditunjukan pada Gambar 2.1 dimana terjadi pengiriman dan penukaran data secara elektronik dari kapal ikan yang terpasang AIS ke kapal ikan terdekat lainnya yang juga memasang AIS dan Stasiun VTS yang ada di darat (VTS Center). Transponder AIS menayangkan informasi secara otomatis yaitu posisi, kecepatan, dan status navigasi pada interval waktu tertentu melalui transmitter VHF yang terpasang pada transponder. Informasi tersebut diambil langsung dari sensor navigasi kapal. Informasi lain yaitu nama kapal dan kode pemanggil VHF diprogram ketika memasang peralatan yang juga ditransmisikan secara berkala. Sinyal VHF diterima oleh transponder AIS yang dipasang pada kapal ataupun stasiun yang ada di darat. Informasi yang diterima dapat ditampilkan pada sebuah layar atau plot grafik yang menunjukkan posisi kapal lain dengan tampilan sesuai yang terdapat pada layar radar (Kaikyo & Advisory, 2008).
Posisi dan data lain disediakan secara otomatis dari sensor kapal ke dalam sistem AIS, dimana data tersebut diformat dan dipancarkan dalam data pendek yang cepat pada saluran VHF. Ketika kapal lain menerima data, data tersebut diartikan dan ditunjukkan pada pengawas kapal, yang bisa melihat laporan AIS dari kapal lain yang sudah dilengkapi grafis dan teks format. Data AIS bisa juga di simpan dalam VDR (Voyage Data Recorder) kapal untuk analisis rekaman kembali di masa depan (Prabawaningtyas, 2009).
Tabel 2. 1
Jenis informasi dari AIS (Yudhistira, 2009)
Data Statis Data Dinamis Data Perjalanan
a Nomor IMO b Call sign dan nama
kapal
c Dimensi kapal
a. Posisi kapal dengan indikasi keakuratan dan status integritas
a Surat Kapal b Kargo
Tabel 2.1 (Lanjutan)
AIS memberikan informasi statis dan dinamis kapal seperti yang ditunjukkan oleh Tabel 10.1. Informasi dinamis diperbarui setiap 2 sampai 10 detik tergantung pada kecepatan kapal sedangkan informasi statis terdiri dari IMO (International Maritim Organization) number, ships name, call sign, dimensi kapal yaitu length and beam, tipe kapal dan lokasi antena pemancar. Sedangkan untuk data dinamis meliputi posisi kapal, arah kapal, kecepatan kapal, heading, dan status navigasional sudut putar kapal. Dari data kecepatan dan posisi kapal dapat diketahui pola pergerakan kapal (Aisjah, A. S., 2011). Pada Tugas Akhir ini data dinamis tersebut akan dijadikan informasi untuk perancangan sistem pengambilan keputusan untuk identifikasi terjadinya Illegal transhipment. Dengan uji coba menggunakan berbagai pola pergerakan kapal per satuan waktu yang diperoleh dari AIS maka dapat diidentifikasi pola pergerakan kapal yang sedang melakukan Illegal transhipment.
2.2 Radar Laut
Radar Laut berfungsi untuk membantu navigasi pada sebuah kapal dan berfungsi untuk mendeteksi kapal lain, daratan maupun benda asing di laut. Pada pelabuhan radar digunakan untuk
Data Statis Data Dinamis Data Perjalanan
d Tipe kapal
e Lokasi dari posisi pemasangan antena pemancar
b. Waktu dalam Coordinate Universal Time (UTC) c. Arah kapal
d. Kecepatan kapal e. Heading
f. Status Navigasional sudut putar
g. Course Over Ground (COG) h. Rate of Turn c Tujuan dan ETA (sesuai dengan kebijakan perwira kapal)
mengawasi pergerakan kapal dan mengatur lalu lintas kapal yang keluar masuk pelabuhan.
Prinsip kerja Radar Laut adalah Gelombang yang dipancarkan radar akan dipantulkan oleh suatu benda tertentu, pantulan gelombang dari benda tersebut akan ditangkap kembali oleh radar. Dengan menganalisa sinyal yang diterima, radar dapat menentukan posisi benda.
Radar laut berdasarkan bentuk gelombang diklasifikasikan menjadi 2 yaitu Continuous Wave (CW) dan Pulse Repitition Frekuensi.
1. Continuous Wave (CW)
Continuous Wave/CW merupakan radar yang menggunakan transmitter dan antena penerima secara terpisah, di mana radar ini terus menerus memancarkan gelombang elektromagnetik. Radar CW yang tidak termodulasi dapat mengukur kecepatan serta posisi sudut target secara akurat. Radar CW yang tidak termodulasi biasanya digunakan untuk mengetahui kecepatan target dan menjadi pemandu rudal.
2. Pulse Repetition Frequency (PRF)
Pulsed Repitition Frequency, merupakan radar yang gelombang elektromagnetiknya terputus secara Gambar 2. 2 Human Interface Radar Laut (kiri) dan Radar Laut(kanan) (Friedman, 1981)
berirama. Frekuensi denyut radar dapat dibagi menjadi 3 bagian, yaitu PRF high, PRF medium dan PRF low.
High PRF menggunakan frekuensi diatas 30 kHz sehingga radar pada frekuensi high ini disebut juga interrupted continuous wave radar. Jarak yang dapat diukur dengan akurat oleh radar ini kurang dari 5km.
Medium PRF menggunakan frekuensi pada rentang 3kHz sampai dengan 30kHz dan dapat mengukur posisi dengan akurat pada jarak 5km-50km.
Low PRF menggunakan frekuensi dibawah 3 kHz dan mempunyai jarak jangkau yang relatif jauh sekitar 50 km-80km.
Jarak Pindai Radar dapat dibagi menjadi 2 yaitu jarak pindai minimum dan jarak pindai maksimum.
a Jarak Pindai Minimum
Faktor yang mempengaruhi jarak pindai minimum antena radar laut adalah sebagai berikut:
Panjang Gelombang Pancaran
Kapabilitas jarak pindai minimum sebuah radar ditentukan dari panjang gelombang pancarannya. Kemampuan elektronik seperti waktu recovery dari receiver dan duplexer memperpanjang jarak pindai maksimum dari yang ditentukan.
Echoes
Echoes adalah gelombang yang diterima receiver setelah dipancarkan dan dipantulkan. Echoes dapat menimbulkan indikator sulit terbaca pada jarak miniumum dan maksimum
Side-Lobe Echoes
Gelombang yang diterima oleh sisi-sisi antena radar disebut Side-Lobe Echoe. Side-Lobe Echoes dapat menimbulkan target sulit terdeteksi jika target berada pada jarak yang sangat dekat.
b Jarak Pindai Maksimum
Faktor yang mempengaruhi jarak pindai maksimum antena radar laut adalah sebagai berikut:
Frekuensi
Frekuensi mempengaruhi jarak pindai maksimum radar. Semakin besar frekuensi, maka semakin besar atenuasinya. Radar dengan frekuensi rendah memiliki jarak pindai yang lebih panjang
Peak Power
Peak Power memiliki pengaruh terhadap jarak pindai maksimum radar. Semakin besar Peak Power, maka semakin besar jarak pindai maksimum sebuah radar .
Panjang Gelombang pancar
Panjang gelombang pancar memperpanjang jarak pindai sebuah radar. Semakin besar panjang gelombang, semakin besar jarak pindah radar.
Pulse Repitition Rate (PRR)
Pulse Repitition Rate (PRR) adalah rasio interval radar memancarkan gelombang. PRRyang cukup diperlukan oleh gelombang sebuah radar untuk mengenai target dan kembali ke radar tersebut.
Karakteristik Target
Target yang “besar” dapat terpindai lebih baik pada jarak yang jauh. Material target yang bersifat konduktif mengembalikan echoes yang relatif lebih kuat dibandingkan dengan material yang bersifat non-konduktif.
Terdapat beberapa cara untuk menentukan performansi radar salah satunya dengan membandingkan rasio Signal dan Noise pada radar. Persamaan Rasio Signal to Noise pada radar adalah sebagai berikut
𝑆𝑁 = 𝑃𝑇𝐺 2λ2σ (4π)3𝑅4 L S L𝐴 K T0 B F Dimana: G = gain antena σ = Target RCS (m2) λ = panjang gelombang(m)
R = rentang jarak dari radar ke target (m) LS= loss sistem
LA= loss perambatan garis edar
K = konstanta Boltzmann’s (1.38 x 10-23 j/°K)
T0= 290° K
B = bandwidth (Hertz) F = unsur sistem noise 2.3 Dinamika Gerak Kapal
Secara umum kapal mengalami gerakan saat berlayar di laut. Gerakan ini disebut juga sebagai enam derajat kebebasan kapal. Enam derajat kebebasan gerakan kapal dibagi menjadi dua yaitu gerakan translasi dan gerakan rotasi. Gerak translasi terdiri dari heave, surge dan sway. Sedangkan gerak rotasi terdiri dari yaw,
roll, dan pitch. Selain itu pada saat kapal bergerak secara translasi terdapat beberapa dinamika gerak kapal yaitu perpindahan ,perpindahan relative, perubahan sudut heading, dan kecepatan heading kapal.
Dinamika gerak kapal pada gambar 2.3, jika dilihat dari posisi atas memiliki keterangan sebagai berikut:
x : perpindahan posisi kapal dalam arah surge y : perpindahan posisi kapal dalam arah sway COG : perpindahan relatif kapal terhadap tanah
: perpindahan sudut heading kapal (Yaw) r : kecepatan heading kapal (d /dt) 2.4 Illegal transhipment
Illegal transhipment menurut hukum yang berlaku di Indonesia adalah proses pemindahan muatan dari satu kapal ke kapal lainnya yang dilakukan di tengah laut dan tanpa adanya ijin dari pabean. Proses membongkar dan memuat barang di tengah laut dilarang (vide Ordonansi Bea jo Ordonansi Kebandaran) (Anwar, 2014).
Barang–barang yang didatangkan melalui laut/udara (dianggap dari luar negeri) wajib dibongkar di tempat–tempat dimana ada Kantor Pabean atau dapat dibongkar ditempat–tempat selain Kantor Pabean (tempat bongkar–muat yang disamakan sebagai Kantor Pabean) dengan izin Kepala Kantor Pabean (pemegang legal mandate diskresi Menteri Keuangan). Barang– barang yang didatangkan melalui laut/udara wajib membuat Pemberitahuan Umum (General Customs Declaration), suatu bentuk perikatan hukum (hak dan kewajiban hukum) antara Pengangkut/Carrier dengan Negara (diwakili Otoritas Pabean) dan kewajiban Nakhoda / Kapten Pilot berakhir setelah membongkar barang–barang yang diangkutnya ke sisi sebelah darat dan atau ditimbun di Gudang atau Lapangan Penimbunan Kontainer (Container Yard) di Kawasan Pabean, dan sejak itu muncul perikatan hukum antara Penerima Barang/Importir/Consignee sebagai Wajib Pajak/Bea Masuk dengan Negara.
Illegal transhipment di laut sering terjadi karena ketidakmampuan pemerintah pesisir dan negara untuk memantau bagaimana, oleh siapa dan dimana hal tersebut dilakukan. Illegal
transhipment di laut adalah penyebab utama dari kurangnya transparansi dalam perikanan global yang memungkinkan IUU fishing serta Illegal transhipment lainnya dalam bentuk crude oil oleh kapal tanker luar.
Illegal transhipment dapat sangat menguntungkan jika dilihat dari sisi bisnis. Melalui Illegal transhipment, kapal penangkap ikan tidak perlu lagi kembali ke pangkalan setelah muatan ikan dalam penuh. Ia tinggal menunggu kapal pengumpul untuk mengambil ikan hasil tangkapan, dan pada saat itu pula kapal pengumpul menyuplai bahan bakar, bahan makanan, serta kebutuhan lainnya kepada kapal penangkap ikan tersebut. Dari pola seperti itu, maka jelas bahwa Illegal transhipment dapat mengefektifkan operasi penangkapan dan mengefisiensikan biaya operasional penangkapan. Jika tanpa Illegal transhipment, maka perbandingan ongkos bahan bakar dengan muatan hasil tangkapan adalah 1:1. Artinya bahwa ketika kapal kembali ke pangkalan, maka kapal tersebut hanya dapat membawa satu paket muatan, yaitu sesuai dengan kapasitas yang dimilikinya. Sementara melalui transhipment, maka perbandingannya bisa 1:2, 1:3, atau bahkan mungkin lebih jika musim ikan sedang berlangsung. Ini artinya bahwa ketika kapal kembali ke pangkalan, maka sebetulnya dia sudah melakukan 2 hingga 3 kali pendaratan muatan ikan melalui
bantuan kapal pengumpul. Pertimbangannya disini adalah berapa biaya bahan bakar yang dapat dihemat melalui praktek Illegal
Gambar 2. 4 Illustrasi illegal transhipment muatan ikan (Jean-Pierre, 2010)
transhipment ini. Selanjutnya dari sisi operasi penangkapan, maka Illegal transhipment memungkinkan kapal untuk tidak mengalami kehilangan kesempatan untuk menguasai fishing ground. Misalnya saja pada saat musim ikan tiba, atau kapal mendapatkan fishing ground yang berlimpah, ketika muatan kapal sudah penuh maka kapal tidak perlu meninggalkan tempat berpotensi tersebut. Jika ia kembali ke pangkalan, maka bisa jadi fishing ground ini akan diambil kapal lain (Nurcholis, 2015).
Kementerian Kelautan dan Perikanan telah menetapkan Peraturan Menteri Kelautan dan Perikanan Nomor 57/PERMEN-KP/2014 tentang Perubahan Kedua Atas Permen KP Nomor PER.30/MEN/2012 Tentang Usaha Perikanan Tangkap di Wilayah Pengelolaan Perikanan Negara Republik Indonesia. Konsideran legislasi tersebut menimbang untuk mewujudkan pengelolaan sumber daya perikanan yang bertanggungjawab dan penanggulangan IUU Fishing di wilayah pengelolaan perikanan Negara Republik Indonesia perlu penghentian alih muatan (transhipment) di tengah laut Peraturan Menteri Kelautan dan Perikanan Nomor 57/PERMEN-KP/2014 tentang Perubahan Kedua Atas Permen KP Nomor PER.30/MEN/2012 Tentang Usaha Perikanan Tangkap di Wilayah Pengelolaan Perikanan Negara Republik Indonesia (Pusluhdaya KP, 2014).
2.5 Collision Regulation
International Maritime Organization (IMO) pada tahun 1972 merancang dan menetapkan peraturan dan regulasi dala konferensi International Regulations for Preventing Collisions at Sea (COLREGS). COLREGS terdiri dari 38 peraturan yang secara umum terbagi menjadi 4 bagian yakni Part A (General), Part B (Steering and Sailing), Part C (Lights and Shape) dan Part E (Extemptions). Dalam COLREGS juga terdapat tambahan yang mengatur tentang sinyal untuk keperluan penangkapan ikan, dan international distress signal.
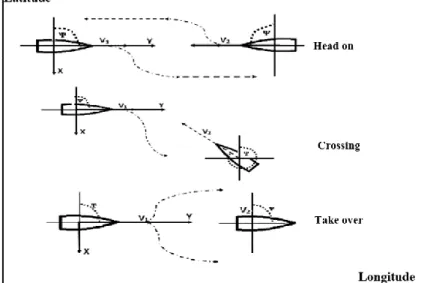
Peraturan IMO mengenai tabrakan dibahas pada Part B Steering and Sailing. Sebelumnya dalam menghindari tabrakan antar kapal ada 3 jenis teknik manuver, yaitu head-on, overtake, dan crossing. Dua istilah yang sering muncul dalam pembahasan anticollision ship, yakni Own vessel dan Target vessel dimana Own vessel merupakan vessel yang dapat dikendalikan sedangkan target vessel merupakan vessel yang menjadi sasaran ketika terjadi tabrakan. Gambar 2.5 merupakan gambaran-gambaran pengaplikasian peraturan COLREGS dan regulasinya untuk anti collision
Gambar 2. 5(a) Head On (b) Crossing (c) Overtake (Lokukaluge, 2011)
Head on : 174o < |heading kapal 1 - heading kapal 2| <186o Crossing : 6o < |heading kapal 1 - heading kapal 2| < 174o Overtake : -6o < heading kapal 1 - heading kapal 2 < 6o
Pola head on, overtake dan crossing tersebut akan dijadikan acuan sebuah kapal melakukan illegal transhipment. Sangat kecil kemungkinan 2 kapal di tengah laut dengan jarak yang berdekatan dan memiliki heading kapal seperti Gambar 2.5. Ini akan beresiko terjadi tabrakan antar kapal. Karena dengan teknologi AIS, 2 buah kapal tersebut dapat menghindari tabrakan dari jarak yang jauh. Dengan kata lain, apabila kasus tersebut terjadi maka dapat
dikatakan 2 kapal ini berdekatan untuk melakukan transshipment (Masroeri, 2016) .
2.6 Sistem Logika Fuzzy
Logika fuzzy pertama kali dikenalkan oleh Lotfi A. Zadeh, professor ilmu pengetahuan computer dari Universitas California, Barkeley. Pada tahun 1965, Zadeh memodifikasi teori himpunan dimana setiap anggotanya memiliki derajat keanggotaan yang bernilai kontinu antara 0 sampai 1. Himpunan ini disebut himpunan kabur (Fuzzy Set).
Beberapa kelebihan yang dimiliki oleh logika fuzzy sehingga dunia ilmu pengetahuan memahami mengapa menerapkan penggunaan logika fuzzy,yaitu :
a Konsep logika fuzzy mudah dimengerti, dimana konsep matematis yang mendasari fuzzy sangat sederhana.
b Logika fuzzy bekerja didasarkan pada bahasa alami.
c Logika fuzzy memiliki toleransi terhadap data-data yang tidak tepat.
d Logika fuzzy mampu memodelkan fungsi-fungsi nonlinier yang sangat kompleks.
e Logika fuzzy dapat bekerja sama dengan teknik-teknik kendali secara konvensional.
Illustrasi sistematika penyusunan logika fuzzy adalah sebagai berikut:
Gambar 2. 6 Sistematika Penyusunan Logika Fuzzy (Kayacan, 2016)
Fuzzifikasi berfungsi untuk mentransformasikan sinyal masukan yang bersifat crisp ke himpunan fuzzy dengan menggunakan operator fuzzifikasi.
Rule bese berisisi basis data dan aturan dasar yang mendefinisikan himpunan fuzzy atas daerah masukan dan keluaran dan menyusunnya dalam perangkat aturan kontol.
Fuzzy inference system merup
akan inti dari logika fuzzy yang mempunyai kemampuan seperti manusia dalam mengambil keputusan. Aksi atur fuzzy disimpulkan dengan menggunakan implikasi fuzzy dan mekanisme inferensi fuzzy.
Defuzzifikasi berfungsi untuk mentransformasikan kesimpulan tentang aksi atur yang bersifat fuzzy menjadi sinyal sebenarnya yang bersifat crisp dengan menggunakan operator defuzzifikasi.
19
METODE PENELITIAN
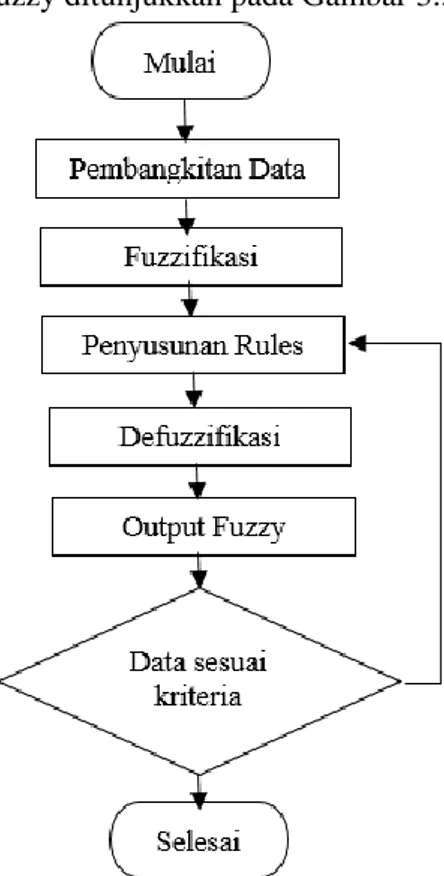
Bab ini berisi tentang tahapan pengerjaan tugas akhir. Langkah-langkah dalam pengerjaan tugas akhir ditunjukkan pada gambar 3.1.
Gambar 3.1 merupakan diagram alir penelitian. Langkah-langkah penelitian sendiri dimuali dari studi literatur, kemudian dilanjutkan dengan menganalisis sistem pada penelitian sebelumnya. Setelah sistem pada penelitian sebelumnya dianalisis, maka dilakukan identifikasi masalah dan berlanjut ke proses pengumpulan data. Setelah data terkumpul maka dilakukan pengembangan sistem yang kemudian disimulasikan dan diuji menggunakan bantuan software MATLAB sekaligus kemudian dianalisa hasil uji sistem yang dikembangkan, dan terakhir tahap validasi hingga penyusunan laporan.
3.1 Studi Literatur
Studi literatur bertujuan untuk membangun pemahaman awal hingga detail mengenai topik tugas akhir, yakni Automatic identification system (AIS), logika fuzzy, pola pergerakan kapal sebagai kriteria Ilegal transhipment, desain sistem pengambilan keputusan berbasis data Automatic identification system (AIS) dan Radar untuk mendeteksi terjadinya Ilegal Transhipment.
3.2 Analisis Perancangan Sistem pada Penelitian Sebelumnya Sistem pengambilan keputusan pada penelitian sebelumnya dirancang dengan menggunakan logika fuzzy untuk identifikasi terjadinya illegal transhipment ditengah laut berbasis data Automatic identification system (AIS). Terdapat 2 klasifikasi data AIS yang digunakan untuk pengujian sistem yaitu data yang dibangkitkan dan data yang diperoleh dari website http://marinetraffic.com. Data yang dibangkitkan merupakan data yang digunakan untuk simulasi dan pengujian sistem. Data yang dibangkitkan berupa data trayektori kapal yang melakukan illegal transhipment berdasarkan kepakaran. Disamping melakukan pengujian sistem, peneliti juga melakukan validasi menggunakan data real kapal yang melakukan illegal transhipment yang diambil dari sumber website http://marinetraffic.com.
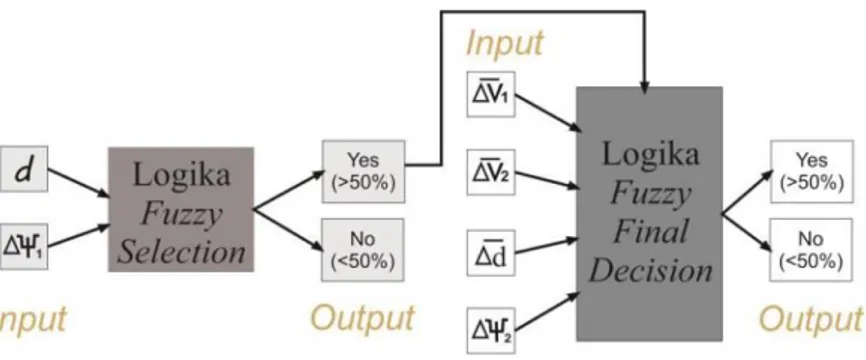
Desain sistem pengambilan keputusan dengan menggunakan logika fuzzy dapat dilihat pada Gambar 3.2.
Gambar 3.2 memperlihatkan bahwa pada sistem pengambilan keputusan yang dirancang pada penelitian sebelumnya menggunakan 2 sistem logika fuzzy yang saling berhubungan. Sistem pengambilan keputusan ini bekerja secara berurutan dan saling berhubungan antara sistem pengambilan keputusan logika fuzzy selection dan sistem pengambilan keputusan logika fuzzy final decision.
Sistem pengambilan keputusan yang dirancang pada penelitian sebelumnya menggunakan 4 variabel masukan yaitu jarak, rata-rata perubahan jarak ,rata-rata perubahan heading, dan rata-rata perubahan kecepatan. Sistem tersusun dari 90 rules yang terdiri dari 9 rules pada tahap logika fuzzy selection dan 81 rules pada tahap logika fuzzy final decision. Sistem ini menghasilkan nilai akurasi sebesar 78% pada pengujian sebelumnya.
3.3 Identifikasi Masalah
Hasil dari analisis perancangan sistem pada penelitian sebelumnya menunjukkan ada beberapa vairabel masukan yang diperlukan untuk menentukan sistem pengambilan keputusan. Variabel masukan tersebut adalah jarak , heading, rata-rata perubahan kecepatan kedua kapal, dan rata-rata perubahan jarak kedua kapal. Selain jumlah variabel masukan, rule yang dibangun
Gambar 3. 2
Desain Sistem Pengambilan Keputusan Pada Penelitian Sebelumnyapada sistem pengambilan keputusan juga menentukan keluaran dari sistem. Sistem pengambilan keputusan pada penelitian sebelumnya tersusun dari 90 rules . Rules tersebut terdiri dari 9 rule pada tahap logika fuzzy selection dan 81 rule pada tahap logika fuzzy final decision.
Sistem hasil penelitian sebelumnya diuji dengan cara menggunakan data pembangkitan pola trayektori yang baru. Hasil uji dan simulasi sistem menunjukkan bahwa:
Jumlah rule pada sistem sebelumnya terlalu banyak.
ada beberapa trayektori illegal transhipment yang belum dapat diidentifikasi oleh sistem yang dirancang pada penelitian sebelumnya.
oleh karena itu perlu dilakukan pengembangan pada sistem yang telah ada. Pengembangan sistem dilakukan dengan cara menambahkan variabel masukan serta membangun kembali rules pada Fuzzy Inference System.
Pengembangan pada sistem dengan menambahkan variabel masukan dan membangun rules yang baru diharapkan dapat meningkatkan akurasi dan memperbaiki kemampuan sistem untuk mengidentifikasi pola trayektori kapal yang melakukan illegal transhipment di tengah laut.
3.4 Pengumpulan Data
Tahap ini merupakan tahap pengumpulan data AIS yang akan diolah sebagai variabel masukan sistem. Data AIS yang dikirimkan oleh kapal akan diterima oleh VTS marinetraffic dan VTS tanjung perak . Data AIS yang diterima VTS kemudian disimpan di server. Berikut ini data yang didapatkan dari website marinetraffic dan VTS Tanjung Perak.
a. Informasi Kapal
AIS akan mengirimkan beberapa informasi kapal yaitu nama kapal , jenis kapal , dimensi kapal , asal negara, destinasi kapal dan waktu .
b. Posisi
Posisi longitude dan latitude kedua kapal yang didapatkan dari AIS akan diolah sehingga menjadi variabel masukanan jarak. Variabel masukan jarak kedua kapal
dalam satuan meter. Jarak antara kedua kapal ini yang selanjutnya menentukan indikasi kemungkinan terjadinya Illegal transhipment atau tidak.
c. Kecepatan (v(t))
Data Kecepatan diambil dari data AIS kedua kapal ditujukan untuk mengetahui perubahan kecepatan kedua kapal dari waktu ke waktu. Data kecepatan yang disajikan AIS adalah nilai kecepatan skalar dalam satuan knot. d. Yaw (Ψ(t))
Yaw adalah posisi heading kapal . Melalui yaw kita dapat menentukan perubahan heading kapal dengan menghitung selisih antara heading saat t Ψ(t) dengan heading saat (t-1) Ψ(t-1). Selanjutnya perubahan Yaw (Δ Ψ) akan dihubungkan dengan peraturan IMO tentang terjadinya tabrakan antar kapal untuk mendeteksi terjadinya pola gerak anomali kapal.
e. Rate of Turn (d Ψ(t)/dt)
Rate of turn adalah kecepatan angular dari heading kapal. Rate of turn didapatkan dari hasil pengolahan perubahan heading per satuan waktu. Rate of turn menunjukkan seberapa cepat kapal melakukan manuver dan dinyatakan dalam satuan deg/min.
f. Rata-rata perubahan jarak( Δd̅̅̅̅)
Rata-rata perubahan jarak adalah selisih jarak antara 2 kapal dari waktu ke waktu dibagi dengan banyaknya data. Rata-rata perubahan jarak diperlukan sebagai variabel masukan sistem untuk menentukan apakah jarak kedua kapal dari waktu ke waktu saling mendekat, saling menjauh, ataupun pada jarak yang terjaga konstan (tidak ada perubahan jarak dari waktu ke waktu).
g. Rata-rata perubahan kecepatan kapal ( Δv̅̅̅̅)
Rata-rata perubahan kecepatan adalah selisih kecepatan kapal dari waktu ke waktu dibagi dengan waktu. Rata-rata perubahan kecepatan kapal diperlukan sebagai variabel
masukan untuk mengetahui apakah kapal melakukan akleserasi , deselerasi, atau memiliki kecepatan konstan. h. Selisih kecepatan kedua kapal (Δv(t))
Selisih kecepatan kedua kapal adalah selisih kecepatan antara 2 kapal setelah 10 menit proses seleksi. Hal ini diperlukan untuk mengetahuin apakah kedua kapal memiliki selisih kecepatan yang besar atau kecil pada tahap akhir identifikasi.
3.5 Pengembangan Perancangan Sistem Pengambilan Keputusan dengan Fuzzy
Metodologi dalam perancangan sistem pengambilan keputusan dengan logika fuzzy ditunjukkan pada Gambar 3.3.
Sistem pengambilan keputusan dirancang menggunakan logika fuzzy. Desain sistem pengambilan keputusan dapat dilihat pada gambar 3.4.
Gambar 3. 4
Desain Sistem Pengambilan Keputusan
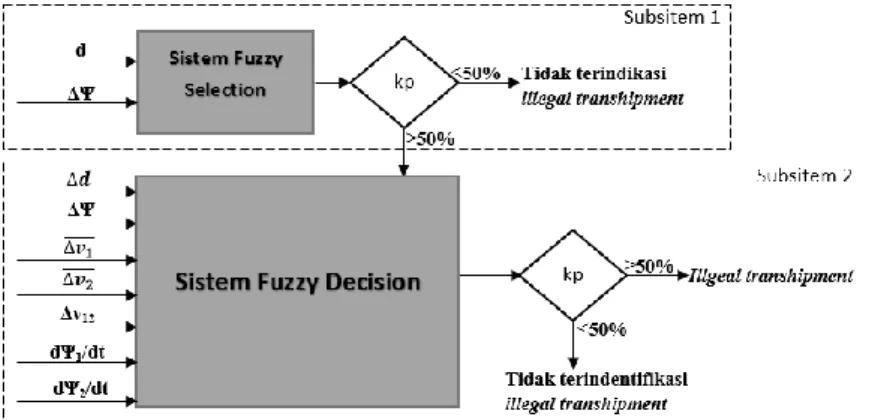
Sistem pengambilan keputusan dirancang menjadi 2 bagian yang saling berhubungan ditunjukkan pada gambar 3.4. Kedua sistem ini bekerja secara berkesinambungan dimulai dari Sistem Fuzzy Selection yang hasilnya dilanjutkan ke Sistem Fuzzy Decision. Perbedaan parameter masukan sistem yang dirancang dan sistem yang telah ada dapat dilihat pada tabel 3.1 dan tabel 3.2. Tabel 3. 1 Perbedaan Parameter Masukan pada Tahap SelectionNo Variabel
masukan
Sistem lama Sistem baru
Range Fungsi keanggotan Range Fungsi keanggotan 1 Jarak d [500 800] trimf [500 800] Trimf dan trapmf 2 Selisih heading (Ψ(t)) [-6 186] trimf [-6 186] trapmf
Tabel 3. 2 Perbedaan Parameter Masukan pada Tahap Decision
No Variabel masukan Sistem lama Sistem baru
Range Fungsi keanggot an Range Fungsi keanggota n
Tabel 3.2 (Lanjutan) 1 Rata-rata perubahan jarak Δd ̅̅̅̅ [-35 35] trimf [-35 35] trimf 2 Selisih heading (Ψ(t)) [-6 186] trimf [-6 186] trapmf 3 Rata-rate perubahan kecepatan kapal 1 Δv1 ̅̅̅̅̅ [-0.25 0.25] trimf [-0.25 0.25] Trimf dan trapmf 4 Rata-rate perubahan kecepatan kapal 1 Δv2 ̅̅̅̅̅̅ [-0.25 0.25] trimf [-0.25 0.25] Trimf dan trapmf 5 Selisih kecepatan kedua kapal Δv(t) - - [0 10] Trimf dan trapmf 6 Rate of turn kapal 1 d Ψ1(t)/dt - - [0 28] trimf 7 Rate of turn kapal 2 d Ψ2(t)/dt - - [0 28] trimf
3.5.1 Sistem Fuzzy Selection
Sistem Fuzzy Selection adalah sistem untuk mensortir 2 kapal berdasarkan variabel masukan sistem yang terdiri dari jarak dan heading. Sistem Fuzzy Selection bertujuan untuk memudahkan proses seleksi kapal-kapal yang diduga akan melakukan illegal transshipment. Gambar 3.5 menggambarkan desain Sistem Fuzzy Selection.
Gambar 3. 5 Sistem Fuzzy Selection
Variabel masukan yang akan masuk dan hasil keluaran dalam sistem fuzzy selection ditunjukkan pada gambar 3.5. Variabel masukan sistem fuzzy selection berjumlah 2 yaitu jarak(d) dan selisih heading (ΔΨ). Variabel jarak dinyatakan dalam meter(m) sedangkan selisih heading dalam derajat(o). Penentuan variebel
masukan dan keluaran tersebut didasarkan pada informasi dari pakar di bidang kelautan (Masroeri, 2016).
Variabel masukan jarak mempunyai rentang 500-800 meter sebagai jarak waspada 2 kapal sedangkan lebih dari 800 meter adalah jarak aman (Nuryahya, 2012). Variabel jarak didapatkan dari perhitungan posisi latitude (lintang) dan longitude (bujur) 2 kapal. Selanjutnya variabel masukan heading digunakan untuk mengetahui arah kedua kapal sehingga diketahui apakah ada kemungkinan kedua kapal untuk saling mendekat atau tidak. Batas variabel masukan heading mengacu pada sudut kedua kapal yang telah diatur pada COLREGS. Variabel keluarannya adalah berupa keputusan terindikasi melakukan illegal transhipment atau tidak. Nilai keluaran kurang dari 50% menunjukkan bahwa kapal tidak melakukan illegal transhipment.Nilai keluaran lebih dari 50% menunjukkan keputusan sistem adalah positif terindikasi melakukan illegal transhipment dan selanjutnya akan dilanjutkan pada tahap fuzzy decision. Bentuk tampilan FIS (Fuzzy Inference Systems)properties dari sistem fuzzy selection ditunjukkan pada Gambar 3. 6 dan detail parameter masukan logika fuzzy selection ditunjukkan pada tabel 3.1.
Gambar 3. 6 FIS Sistem Fuzzy Selection Tabel 3. 3 Parameter Masukan Logika Fuzzy Selection
No Parameter Satuan Himpunan
Keanggotaan
Domain Fungsi
Keanggotaan
1 Jarak meter Dekat [500 500
650 680] trapmf Jauh [600 800] trimf 2 Heading degree OT [-6 -5 5 6] trapmf C [6 7 173 174] trapmf HO [174 175 185 186] trapmf Keterangan: OT : Overtake, C : Crossing, HO : Head On
Tabel 3.1 menjelaskan secara detail nilai yang digunakan pada masing-masing parameter masukan sistem. Besarnya interval untuk masing-masing parameter masukan berdasarkan informasi yang diterima dari pakar. Dibawah ini penjabaran dari masukan serta keluaran sistem logika fuzzy selection.
Gambar 3. 7 Himpunan Keanggotaan Masukan Jarak Gambar 3.7 menunjukkan himpunan keanggotaan dari parameter masukan jarak waspada antara 2 kapal sedangkan gambar 3.8 merupakan illustrasi jarak waspada 2 kapal.
Gambar 3. 8 Illustrasi Jarak Waspada 2 Kapal
Parameter masukan jarak waspada kapal dibagi menjadi 2 himpunan keanggotaan. Himpunan keanggotaan tersebut terdiri dari himpunan keanggotaan dekat dan Himpunan keanggotaan jauh. Himpunan keanggotaan dekat mempunyai fungsi keanggotaan trapezium sedangkan himpunan keanggotaan jauh mempunyai fungsi keanggotaan segitiga. Kedua himpunan keanggotaan memiliki range nilai yang ditentukan berdasarkan
penelitian sebelumnya yang membahas tetang jarak waspada terjadinya tabrakan kapal. Fungsi keanggotaan trapesium pada himpunan keanggotaan dekat digunakan karena pada range jarak 500-680 adalah jarak waspada untuk 2 kapal. Pada himpunan keanggotaan jauh semakin ke kanan nilai keanggotaan fungsi trimf semakin mendekati nilai satu sedangkan semakin ke kiri nilai keanggotaan fungsi trimf semakin mendekati nol. Hal ini memiliki alasan karena semakin jauh jarak 2 kapal, maka semakin kecil kemungkinan terindikasi melakukan illegal transhipment. Variabel masukan jarak diperoleh dari perhitungan persamaan (3.1).
𝑑 = √(𝑥1− 𝑥2)2+ (𝑦1− 𝑦2)2 (3.1) Dimana: d : jarak (meter) x1 : longitude kapal 1 x2 : longitude kapal 2 y1 : latitude kapal 1 y2 : latitude kapal 2
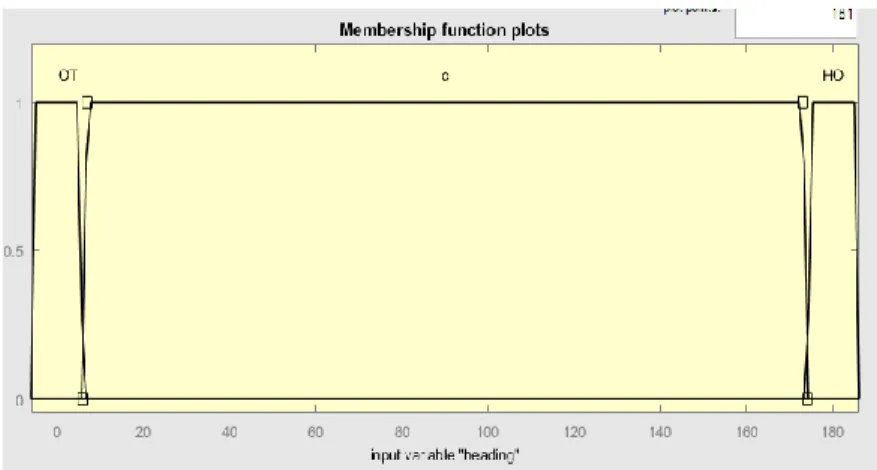
Gambar 3. 9 Himpunan Keanggotaan Masukan Heading Parameter masukan heading antara 2 kapal dibagi menjadi 3 himpunan keanggotaan untuk mengelompokkan setiap nilai dari selisih sudut heading. Himpunan keanggotaan tersebut yaitu
overtake (OT), crossing (C), dan head on (HO) (Masroeri, 2016). Gambar 3.9 menunjukkan parameter selisih heading 2 kapal yang merupakan masukan fuzzy selection sedangkan gambar 3.10 merupakan illustrasi heading 2 kapal.
Gambar 3. 10 Illustrasi Heading Kapal
Setiap himpunan keanggotaan masukan heading menggunakan fungsi keanggotaan bentuk trapezium (trapmf). Fungsi keanggotaan trapmf ini digunakan untuk parameter masukan heading karena semua sudut heading memiliki nilai keanggotaan satu. Range nilai untuk setiap himpunan keanggotaan OT, C, dan HO berturut-turut yaitu -6 sampai 6 degree, 6 sampai 174 degree, dan 174 sampai 186 degree. Variabel masukan selisih heading 2 kapal diperoleh dari perhitungan persamaan (3.2).
ΔΨ = Ψ1− Ψ2 (3.2) Dimana Ψ1:Heading kapal 1 (o)
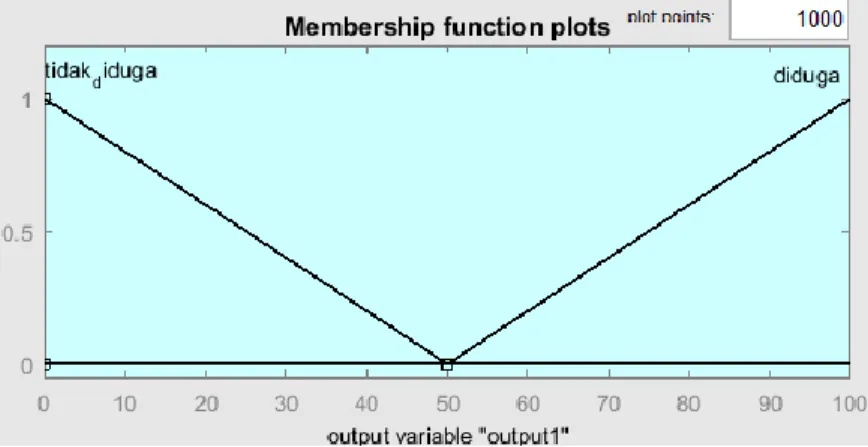
Gambar 3. 11 Himpunan Keanggotaan Keluaran Sistem Fuzzy Selection
Gambar 3.11 menunjukkan fungsi keanggotaan keluaran pada sistem pengambilan keputusan logika fuzzy selection. Variabel keluaran dibagi menjadi 2 fungsi keanggotaan yaitu diduga melakukan illegal transshipment dan tidak diduga. Tiap fungsi keanggotaan tersebut menggunakan bentuk segitiga (trimf). Range nilai untuk setiap himpunan keanggotaan tidak diduga dan diduga secara berturut-turut yaitu 0 – 50 % dan 50 – 100 %.
Hasil dari sistem fuzzy selection ini akan membantu memilah dan melakukan sortir terhadap pola trayektori kapal di tengah laut. Apabila masuk ke dalam kriteria diduga illegal transshipment maka akan dilanjutkan diolah menjadi masukan ke dalam sistem pengambilan keputusan sistem logika fuzzy decision.
Selanjutnya adalah penyusunan rule base (basis aturan) yang akan digunakan pada sistem untuk mengambil keputusan apakah kapal merupakan kapal dengan pola pergerakan seperti variabel masukan sistem pengambilan keputusan sesuai dengan kriteria kapal yang melakukan illegal transhipment atau tidak. Untuk penentuan jumlah rule berdasarkan kemungkinan menggunakan asas probabilitas. Logika fuzzy selection terdiri dari 2 variabel masukan dan 1 keluaran maka diperoleh 6 aturan (rules) if – then yang akan menjadi basis aturan dalam logika fuzzy selection.
Berikut ini adalah Rule Base pada logika fuzzy selection: R1 : if (jarak is dekat) and (hading is OT) then (keluaran is
diduga)
R2 : if (jarak is dekat) and (heading is C) then (keluaran is diduga)
R3 : if (jarak dekat) and (heading is HO) then (keluaran is diduga)
R4 : if (jarak jauh) and (heading is C) then (keluaran is diduga) R5 : if (jarak jauh) and (heading is HO) then (keluaran is
diduga)
R6 : if (jarak jauh) and (heading is OT) then (keluaran is tidak diduga)
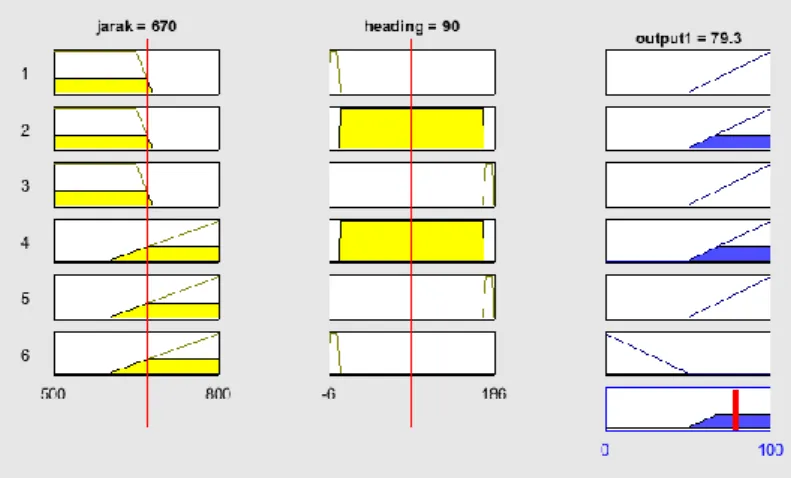
Tahap terakhir adalah defuzzifikasi yang merupakan proses mengubah besaran fuzzy menjadi bentuk data crisp atau nilai tegas berdasarkan fungsi keanggotaannya. Metode defuzzifikasi dalam tugas akhir ini menggunakan metode centroid. Gambar 3.12 menunjukkan rule viewer dari sistem pengambilan keputusan logika fuzzy yang telah dirancang. Rule Viewer pada Gambar 3.12 bertujuan untuk mengetahui angka numerik yang dihasilkan dari sistem yang sudah dibangun dalam pengambilan keputusan.
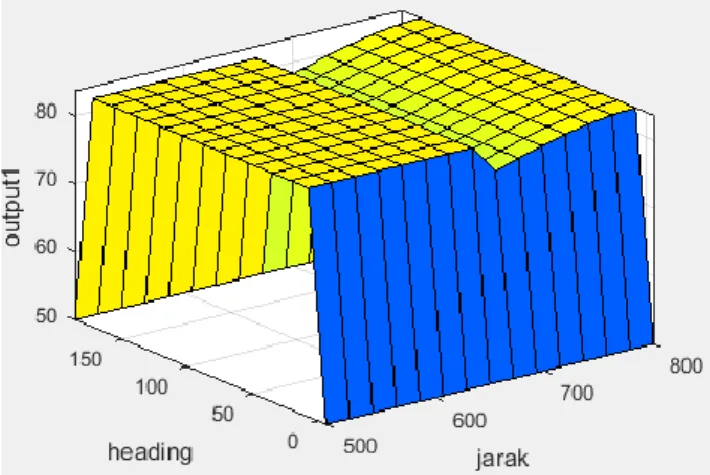
Selain Rule viewer hubungan antara variabel masukan dan keluaran sistem ditampilkan dalam bentuk 3 dimensi yang ditunjukkan oleh surface viewer pada Gambar 3.13.
Gambar 3. 13 Surface Viewer Sistem Fuzzy Selection
Gambar 3.11 menunjukkan hubungan variabel masukan
heading (deg) dan jarak (meter) terhadap hasil keluaran
sistem fuzzy selection (%).
3.5.1 Sistem Fuzzy Decision
Sistem fuzzy decision adalah sistem yang mengolah lebih lanjut hasil dari sistem fuzzy selection untuk menentukan 2 kapal teridentifikasi melakukan transhipment atau tidak.
Gambar 3.14 merupakan sistem logika fuzzy decision dengan variabel masukan berupa pola perubahan kecepatan masing-masing kapal,rate of turn, perubahan jarak kedua kapal, selisih kecepatan kedua kapal , dan selisih heading akhir sebelum diputuskan illegal transhipment atau tidak.
Gambar 3. 15 FIS Sistem Fuzzy Decision
Tampilan FIS sistem fuzzy decision dapat dilihat pada gambar 3.15. Sistem pengambilan keputusan yang dirancang menggunakan kendali logika fuzzy tipe Mamdani. Tipe ini dipilih karena sesuai dengan sistem yang dirancang yaitu masukan dan keluaran numerik. Perancangan sistem dimulai dari penentuan parameter masukan yang akan diolah ke dalam sistem logika fuzzy melalui proses fuzzifikasi. Parameter masukan sistem fuzzy decision dapat dilihat pada tabel 3.4.
Tabel 3. 4 Parameter Masukan Logika Fuzzy Decision (Suncoko, 2017)
No Parameter Satuan Himpunan
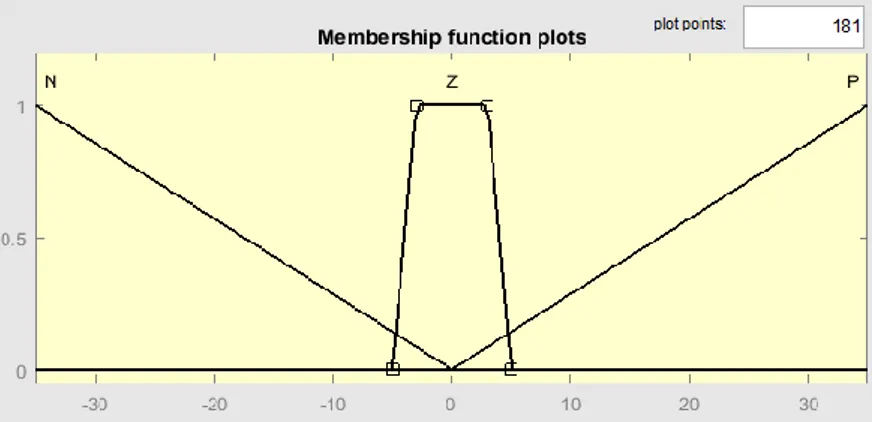
Keanggotaan Domain Fungsi Keanggotaan 1 Perubahan Jarak meter N [-35 -35 0] trimf Z [-5 -3 0 3 5] trapmf P [0 35 35] trimf 2 Heading degree OT [-6 -5 5 6] trapmf C [6 7 173 174] trapmf
Tabel 3.4 (Lanjutan)
No Parameter Satuan Himpunan
Keanggotaan Domain Fungsi Keanggotaan 2 Heading degree HO [174 175 185 186] trapmf 3 Perubahan kec kapal 1 knot Kecil [-0.25 -0.25 -0.1 0] trapmf Sedang [-0.1 0 0.1] trimf Besar [0 0.1 0.25 0.25] trapmf 4 Perubahan kec kapal 2 knot Kecil [-0.25 -0.25 -0.1 0] trapmf Sedang [-0.1 0 0.1] trimf Besar [0 0.1 0.25 0.25] trapmf 5 Selisih kecepatan kedua kapal knot kecil [0 0 0.45 0.5] trapmf Besar [0.5 10 10] trimf 6 Rate of Turn kapal 1 deg/min Kecil [0 0 5] trimf Sedang [3 9 15] trimf Besar [12 20 28] trimf 7 Rate of Turn kapal 2 deg/min Kecil [0 0 5] trimf Sedang [3 9 15] trimf Besar [12 20 28] trimf
Keterangan: OT : Overtake, C : Crossing, HO : Head On N : Negative , Z : Zero , P : Positive
Tabel 3.2 menjelaskan secara detail nilai yang digunakan pada masing-masing parameter masukan sistem. Dibawah ini penjabaran dari masukan serta keluaran sistem logika fuzzy decision.
Gambar 3. 16 Himpunan Keanggotaan Masukan Perubahan Jarak
Fungsi keanggotaan perubahan jarak 2 kapal yang merupakan masukan dari logika fuzzy final decision ditunjukkan pada Gambar 3.16. Parameter masukan perubahan jarak 2 kapal dibagi menjadi 3 himpunan keanggotaan untuk mengelompokkan setiap nilai dari jarak waspada tersebut. Himpunan keanggotaan tersebut yaitu negatif (N), zero (Z), dan positif (P) (Masroeri, 2016). Tiap fungsi keanggotaan tersebut menggunakan bentuk segitiga (trimf) dan memiliki range nilai tertentu. Range nilai untuk setiap himpunan keanggotaan N, Z, dan P berturut-turut yaitu -35 –0 meter, -5 – 5 meter, dan 0 – 35 meter. Variabel masukan perubahan jarak diperoleh dari perhitungan persamaan (3.4).
Δ𝑑
̅̅̅̅ =∑𝑛𝑛=1(𝑑(𝑛)−𝑑(𝑛−1))
𝑛 (3.3) Dimana :
Δ𝑑
̅̅̅̅ : rata-rata perubahan jarak 2 kapal (meter) d(n) : jarak kedua kapal saat data ke-n (meter) d(n-1) : jarak kedua kapal saat data ke-(n-1) (meter)
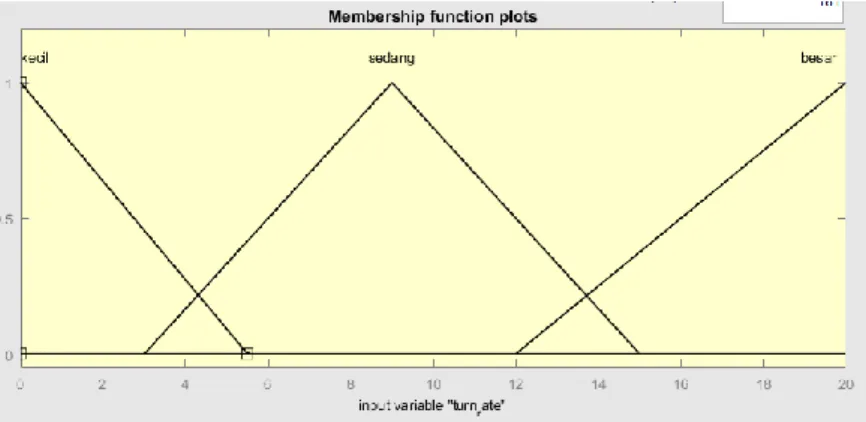
Gambar 3. 17 Himpunan Keanggotaan Masukan Rate of Turn Kapal 1 &2
Gambar 3.17 menunjukkan fungsi keanggotaan rate of turn kapal yang merupakan masukan fuzzy selection.Parameter masukan rate of turn dibagi menjadi 3 himpunan keanggotaan. Himpunan keanggotaan tersebut yaitu kecil, sedang, dan besar (Suncoko, 2017). Parameter rate of turn digunakan untuk mengetahui apakah pola manuver kapal termasuk wajar atau tidak. Pada open water (perairan terbuka) sangat jarang kapal melakukan intensitas manuver yang besar (Jean-Pierre, 2010). Tiap fungsi keanggotaan tersebut menggunakan bentuk segitiga (trimf). Fungsi keanggotaan trapmf ini sangat sesuai digunakan untuk parameter masukan rate of turn. Range nilai untuk setiap himpunan keanggotaan kecil, sedang, dan besar berturut-turut yaitu 0 sampai 5,5 deg/min, 3 sampai 15 deg/min, dan 12 sampai 20 degree/min. Rate of turn diperoleh melalui selisih sudut heading per satuan waktu. Variabel masukan rate of turn kapal diperoleh dari perhitungan persamaan (3.3).
𝑟 =𝑑Ψ𝑑𝑡 (3.4) Dimana :
r : turn rate (deg/min) Ψ : heading kapal (deg)
Gambar 3. 18 Himpunan Keanggotaan Masukan Heading Himpunan keanggotaan selisih heading 2 kapal yang merupakan masukan fuzzy decision ditunjukkan pada gambar 3.18. Parameter masukan heading antara 2 kapal dibagi menjadi 3 fungsi keanggotaan untuk mengelompokkan setiap nilai dari selisih sudut heading. Himpunan keanggotaan tersebut yaitu overtake (OT), crossing (C), dan head on (HO) (Masroeri, 2016). Tiap fungsi keanggotaan tersebut menggunakan bentuk trapezium (trapmf). Fungsi keanggotaan trapmf ini digunakan untuk parameter masukan heading karena semua sudut heading memiliki nilai keanggotaan satu. Range nilai untuk setiap himpunan keanggotaan OT, C, dan HO berturut-turut yaitu -6 sampai 6 degree, 6 sampai 174 degree, dan 174 sampai 186 degree. Variabel masukan selisih heading 2 kapal diperoleh dari perhitungan persamaan (3.5).
ΔΨ = Ψ1− Ψ2 (3.5) Dimana
Ψ1:Heading kapal 1 (o)
Gambar 3. 19 Himpunan Keanggotaan Masukan Perubahan Kecepatan Kapal 1&2
Himpunan keanggotaan perubahan kecepatan kapal yang merupakan masukan dari logika fuzzy final decision ditunjukkan pada Gambar 3.19. Perubahan kecepatan kapal disini adalah perubahan dari waktu ke (n) dengan waktu ke (n-1), lalu dijumlah dan dirata-rata persatuan waktu. Parameter masukan perubahan kecepatan kapal dibagi menjadi 3 himpunan keanggotaan untuk mengelompokkan setiap nilai dari masukan tersebut. himpunan keanggotaan tersebut yaitu negatif (N), zero (Z), dan positif (P) (Masroeri, 2016). Fungsi keanggotaan N dan P menggunakan trapesium (trapmf) sedangkan unntuk Z menggunakan segitiga (trimf).Range nilai untuk setiap himpunan keanggotaan N, Z, dan P berturut-turut yaitu -0.25 – 0 Knot, -0.05 – 0.05 Knot, dan 0 – 0.25 Knot. Variabel masukan kecepatan diperoleh dari perhitungan persamaan (3.6). Δv ̅̅̅̅ =∑𝑛𝑛=1(𝑣(𝑛)−𝑣(𝑛−1)) 𝑛 (3.6) Dimana : Δ𝑣
̅̅̅̅ : rata-rata perubahan kecepatan kapal (knot/min) v(n) : kecepatan kapal saat data ke-n (knot) v(n-1) : kecepatan kapal saat data ke-(n-1) (knot)
Gambar 3. 20 Himpunan Keanggotaan Masukan Selisih Kecepatan
Himpunan keanggotaan selisih kecepatan kapal merupakan masukan dari logika fuzzy final decision ditunjukkan pada Gambar 3.208. Selisih kecepatan kapal disini adalah perbedaan kecepatan kapal 1 dengan kapal 2 dalam besaran vektor. Parameter masukan perubahan kecepatan kapal dibagi menjadi 2 himpunan keanggotaan untuk mengelompokkan setiap nilai dari masukan tersebut. Himpunan keanggotaan tersebut yaitu kecil dan besar (Suncoko, 2017). Fungsi keanggotaan kecil menggunakan trapesium (trapmf) sedangkan untuk fungsi keanggotaan besar menggunakan segitiga (trimf).Range nilai untuk setiap himpunan keanggotaan kecil dan besar berturut-turut yaitu 0 – 0.5 Knot dan 0.5-10 Knot. Variabel masukan kecepatan diperoleh dari perhitungan persamaan (3.7).
Δv = √𝑣12+ 𝑣
22− 2𝑣1𝑉2𝑐𝑜𝑠ΔΨ (3.7) Dimana :
Δv : selisih kecepatan 2 kapal setelah 10 menit (knot)
ΔΨ : selisih heading kedua kapal (deg)
v1 : kecepatan kapal 1 setelah 10 menit (knot)
Gambar 3. 21 Fungsi Keanggotaan Keluaran Sistem Fuzzy Decision
Gambar 3.21 menunjukkan himpunan keanggotaan keluaran pada sistem pengambilan keputusan logika fuzzy decision. Variabel keluaran dibagi menjadi 2 himpunan keanggotaan yaitu diduga melakukan illegal transshipment dan tidak melakukan illegal transshipment. Fungsi keanggotaan masing-masing himpunan tersebut menggunakan bentuk segitiga (trimf). Range nilai untuk setiap himpunan keanggotaan tidak diduga dan diduga secara berturut-turut yaitu 0 – 50 % dan 50 – 100 %.
Selanjutnya adalah penyusunan rule base (basis aturan) yang akan digunakan pada sistem untuk mengambil keputusan apakah kapal merupakan kapal dengan pola pergerakan seperti variabel masukan sistem pengambilan keputusan sesuai dengan kriteria kapal yang melakukan illegal transhipment atau tidak. Untuk penentuan jumlah rule berdasarkan kemungkinan menggunakan asas probabilitas. Logika fuzzy decision terdiri dari 5 variabel masukan dan 1 keluaran maka diperoleh 47 aturan (rules) if – then yang akan menjadi basis aturan dalam logika fuzzy decision.
Berikut ini adalah Rule Base pada logika fuzzy selection: R1 : if (perubahan jarak 2 kapal is P) then (keluaran is tidak) R2 : if (perubahan jarak 2 kapal is Z) then (keluaran is tidak)