Gerak dan Lintasan Satelit
Oleh
Dr. Suryadi Siregar
Program Studi Astronomi
Institut Teknologi Bandung
Satelit Sebagai Benda Langit
Orbit merupakan elemen dasar dalam setiap misi ruang angkasa. Untuk mengerti bagaimana gerak dan lintasan sebuah satellit, diperlukan beberapa pengetahuan dasar tentang kalkulus dan geometri. Roket yang terbang ke angkasa luar, satelit yang bergerak bebas dapat dijelaskan dari persamaan gerak yang telah dikembangkan oleh Copernicus, Kepler dan Newton uyang semuanya terakum dalam pengetahuan mekanika benda langit. Sekali posisi dan kecepatan sebuah objek diketahui, yang merupakan fungsi dari medan gravitasi, orang dapat memperediksi dengan tepat dimana posisi objek dalam beberapa menit mendatang maupun tahun. Ada beberapa jenis orbit yang dapat dirancang untuk meletakkan satelit pada posisinya. Orbit dari satelit ini diragakan dalam Gb 2-1
Gb 2-1 Bermacam tipe orbit seperti orbit parking, transfer orbit dan final orbit. Sebuah satelit umumnya memulai kala hidup pada lintasan parking, dari lintasan ini kemudian upper stage roket digunakan sebagai booster untuk menempatkan satelit di orbitnya. Beberapa dorongan diperlukan sampai satelit menempati posisi yang diharapkan
2.1 Persamaan gerak
Persamaan gerak satelit dapat dipelajari dengan meninjau masalah dua benda yang memenuhi persamaan; r 2 r r •• → ∧ = − μ (2-1) Dimana
r r r → ∧ = (2-2) Merupakan vektor satuan sepanjang garis M-m, sedangkan
μ = G(M+m) jika m << M maka pusat koordinat dapat dianggap titik
M itu sendiri sehingga persamaan gerak dapat ditulis dalam bentuk yang identik;
Gb 2-2 Koordinat kartesis untuk sistem dua benda, m bergerak relatif terhadap M. Dalam penurunan persaman gerak m dan M dinyatakan sebagai massa titik
Dari persamaan diatas dapat diturunkan beberapa besaran antara lain kecepatan dan percepatan dari titk massa m relatif terhadap M
v r r r r
•
→ → • ∧ • ∧
= = + θ θ (2-3) Dan vektor percepatannya adalah;
2 θ θ θ θ •• → → •• • •• • • ∧ = = − + +
Dengan menggunakan kaedah Hukum Newton, turunkan persaamaan (2-1) dua kali terhadap waktu t, membandingkan dengan persamaan (2-4) diperoleh persamaan gerak satelit, a) untuk gerak tanpa pengaruh gaya gangguan
2 2 r r r μ θ •• • − − = (2-5) 2 0 rθ rθ •• • • + = (2-6)
b) untuk gerak dengan pengaruh gaya gangguan;
2 2 ( , ) r r f r t r μ θ •• • − − = + (2-7) 2 ( , ) rθ rθ g r t •• • • + = (2-8)
dalam hal ini f(r,t) dan g(r,t) masing masing merupakan fungsi gangguan pada arah radial r dan tangensial. Gaya gangguan dapat dibedakan dalam dua katagori, yaitu yang bersifat gravitasional dan non-gravitasional. Gaya ganggu gravitasional datang dari bentuk bumi yang tidak simetri dan rapat massa yang yang berbeda disatu tempat dengan tempat yang lain. Untuk satelit yang orbitnya jauh dari Bumi, gaya ganggu bulan juga turut berperan, demikian pula halnya dengan manuver wahana maupun batu-batu angkasa yang mendekati Bumi. Sedangkan gaya ganggu non-gravitasional bisa datang dari pengereman atmosfer maupun tekanan radiasi Matahari, yang berbeda pada saat satelit melintasi bayang-bayang Bumi dibandingkan ketiga ia menerima sinar langsung dari Matahari. Apabila gerak satelit dipengaruhi oleh gaya hambatan atmosfer (atmospheric drag) maka gaya gangguan dapat dinyatakan oleh persamaan;
2 D 1 D v 1 D F C A v e C A v v 2m 2m → → → = − ρ = − ρ (2-9) A = adalah luas penampang satelit
ρ = rapat massa udara v = kecepatan satelit m = massa satelit v e→= v v →
CD koefisien gesek angkasa, dalam hal ini CD = 1, untuk bola bulat sempurna dan memenuhi
jauh lebih besar dari jalan bebas rata-rata molekul. CD = 2, untuk bola bulat sempurna dan
memenuhi jauh lebih kecil dari jalan bebas rata-rata molekul, pada ketinggian 0 < H < 250 kilometer gaya ganggu atmosfer cukup berperan
Gaya hambat angkasa FD, menurut Pritchard et al.(1993) dapat juga ditulis dalam komponen
radial dan tangensial dalam bentuk
( , )f r t B v r • = − ρ (2-10) ( , )g r t B vr •• = − ρ θ (2-11) B dalam pernyataan (2-10) diatas disebut koefisien balistik dan didefinisikan sebagai,
m A C B D 2 = (2-12) Gaya hambatan atmosfer tidak boleh diabaikan untuk satelit yang bergerak pada orbit rendah( kurang dari 250 km). Gaya ini mempunyai arah yang berlawanan dengan arah vektor kecepatan dan secara bertahap menghilangkan energi satelit. Berkurangnya energi satelit menyebabkan radius orbit menjadi mengecil secara gradual satelit akan jatuh ke Bumi
Gaya gravitasi F→g =mg k→ mengarah ke pusat Bumi dan gaya gesek angkasaFd C A v vD ρ
→ →
= − berlawanan arah dengan gerak satelit selain itu, sedangkan gaya Newton F md r22
dt → →
= dalam hal ini, berlaku F Fg Fd
→ → →
= + ,
Karena vektor posisi →r =x i y j z k→+ →+ → dan vektor kecepatan v→=x i y j z k• → • → • →+ + dan percepatannya a→ •• → •• → •• →= x i+ y j z k+
Oleh sebab itu ada tiga komponen gaya yang bekerja disepanjang sumbu koordinat yang kita pilih, gaya-gaya tesebut adalah;
2 2 2 D 1 m x C A x x y z 2 •• • • • • = − ρ + + 2 2 2 D 1 m y C A y x y z 2 •• • • • • = − ρ + + 2 2 2 D 1 m z C A z x y z mg 2 •• • • • • = − ρ + + −
Kita lihat hanya komponen gaya dalam arah sumbu z yang mempunyai gaya berat, mg
Gb 2-4 Pesawat ulang-alik Atlantis. Fungsi wahana(space shuttle) melakukan transportasi angkasa luar termasuk menempatkan satelit pada orbitnya menjaga ia tetap ada disana memutar dan memindahkannya bila diperlukan. Wahana mempunyai kemampuan untuk menambah/mengurangi kecepatan di angkasa bila diperlukan dan tetap berada pada orbitnya. Space booster terdiri dari beberapa tingkat yang fungsinya adalah untuk menambah kecepatan dan kemudian melontarkan satelit pada lintasan yang telah
2.2 Desain Orbit
Berikut diuraikan kajian teorits cara meletakkan satelit pada bidang orbit. Asumsi gerak mengikuti mekanika Newton factor teknologi, gangguan gravitasional dan non-gravitasional diabaikan, semua kaedah Hukum Kepler dapat digunakan untuk bahan telaah;
Gb.2-5 Kajian gerak dua benda untuk mendeskripsikan penempatan orbit satelit dan jenis lintasan yang dihasilkan sebagai fungsi dari sudut lontar θ dan kecepatan lontar V. Jari-jari Bumi R dan ketinggian satelit dari permukaan Bumi adalah H. Jarak satelit dari pusat gaya sentral (pusat Bumi) r=R+H
Dari persamaan gerak system dua-benda (two body problem) kita ketahui sebuah partikel yang bergerak dibawah gaya gravitasi akan memenuhi hukum berikut. Kecepatan Satelit pada orbit elips memenuhi persamaan;
r = R + H (2-14) dari kaedah hukum Kepler ke-3 kekekalan momentum sudut memenuhi pernyataan;
2 1 r x V 1 r V Sin 1 a(1 e ) 2 2 2 → → → → = θ= μ − (2-15) Ubah bentuknya dengan menghilangkan tanda akar diruas kiri diperoleh;
⎥⎦ ⎤ ⎢⎣ ⎡ − = − 2 2 2 2 2 2 2 1 V r Sin V r e μ μ θ (2-16)
Disamping itu diketahui bahwa kecepatan lepas (kecepatan parabola pada jarak R dari pusat Bumi adalah
R
Vp2 =2μ (2-17)
Definisikan rasio kuadrat kecepatan satelit dengan kecepatan lepas;
2 ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ = p V V y (2-18) ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ = R H
ε , perbandingan tinggi satelit dengan jejari Bumi, x=
(
Sinθ , dan z = 1 –e)
2 2jadi persamaan diatas dapat ditulis sebagai
(
)
[
y]
xy
z=4 1+ε 1−(1+ε) (2-20)
atau dapat disederhanakan menjadi
[
η]
η −
=4x 1
z dalam hal ini η= 1
(
+ε)
y (2-21)Untuk nilai x =1
1. Sin2θ = 1 jadi sudut pelontaran θ = π/2 dan - π/2 disebut horizontal injection 2. z menjadi maksimum bila dipenuhi hubungan dz/dη = 0
atau
[
]
2 1 0 1 ( 4 η −η = →η= η x d d (2-22)nilai ini dipenuhi untuk;
z(1/2) = x = 1 atau e = 0 , orbit lingkaran dapat terbentuk
Untuk x< 1
Sin2θ < 1 nilai θ yang memenuhi adalah θ < π/2 atau - π/2
Nilai ini dipenuhi oleh z<1 atau e ≠0 orbit lingkaran tidak pernah terbentuk
Syarat lain
rmin = a(1-e) > R untuk x =1 harus dipenuhi juga
2a > H + 2R (2-23) dari persamaan ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − = a r V2 μ 2 1 diperoleh 2 2 ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − = V r a μ μ (2-24)
Substitusi y dan ε diperoleh; ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − + = η ε 1 1 2 1 R a (2-25)
dengan demikian agar satelit tidak jatuh ke Bumi haruslah
ε 2 1 1 1 2R + = + H R a f (2-26) atau ε η ε 2 1 1 1 1 2 1 > + ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − + (2-27)
⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + + − ε ε η 2 1 1 p atau ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ + + + + → .... 8 4 2 1 2 1 ε ε2 ε3 ηf (2-28)
Asumsikan suku-suku faktor kuadratis dan seterusnya dapat kita abaikan terhadap bentuk linier maka persaman dapat dinyatakan sebagai;
1 1 2 2 ε ⎡ ⎤ → η ≤ ⎢ + ⎥ ⎣ ⎦ (2-29)
Untuk nilai η = ½ + ε/4 diperoleh;
[
]
1 1 2 1 2 1 + − ⎥⎦ ⎤ ⎢⎣ ⎡ + = ε ε y (2-30)Selain itu karena ;
(
)
1 2 2 2 1 2 1 2 1 + − ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + = → ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ = V Vp ε ε Vp V y (2-31)kecepatan ini merupakan kecepatan kritis, jika kecepatan ini dinyatakan sebagai Vf.
(
)
1 2 1 2 1 1 2 2 f p V = V ⎛⎜ +ε ⎞⎟ +ε − ⎝ ⎠Dapat diambil kesimpulan;
1) Dalam hal 2 2
f
V ≤V maka satelit jatuh ke Bumi, bergerak dalam pola orbit ICM (Inter
Continental Missile). Tahanan udara dan gangguan gravitasional maupun non-gravitasional akan mempengaruhi bentuk lintasan.
2) Jika 2 2
f
V >V satelit tidak akan jatuh dan mengorbit mengelilingi Bumi dalam bentuk
lintasan tertentu. Gambar 2-5 berikut meragakan berbagai kasus untuk beberapa sudut lontar sebagai fungsi rasio kecepatan lontar kuadrat dan kecepatan parabola kuadrat,
2 p V V η= ⎜⎛⎜ ⎞⎟⎟ ⎝ ⎠
Jadi jelas bahwa sudut lontar θ dan kecepatan lontar V harus diperhatikan dengan seksama agar satelit dapat mengorbit dalam bentuk lintasan yang dikehendaki. Kesalahan yang terjadi pada saat menentukan sudut θ dan kecepatan lontar V akan menyebabkan tidak terbentuknya orbit yang diharapkan
Gb 2-6 Lintasan lingkaran,elips, parabola dan hiperbola. Lintasan lingkaran tidak pernah terjadi bila x< 1(perhatikan legend), satelit akan jatuh bebas bila z = 0. Lintasan parabola terjadi bila nilai eta, η = 1. Sedangkan untuk hiperbola terjadi bila η > 1
Grafik diatas menunjukkan satelit masih bisa mengorbit apabila 0 < η < 1 satelit tidak akan jatuh ataupun lepas dari gravitasi Bumi. Untuk lingkaran hanya bisa terjadi bila x = 1 atau sudut lontar θ = ± 900 dan harus pada nilai η = 0.5. Gambar diatas juga menunjukkan bahwa untuk
η < 0,5 grafik menunjukkan monoton naik sedangkan pada 0,5 < η grafik memperlihatkan pola monoton turun. Pada nilai η =1 berapapun besarnya sudut lontar, maka orbit satelit akan selalu berbentuk parabola.
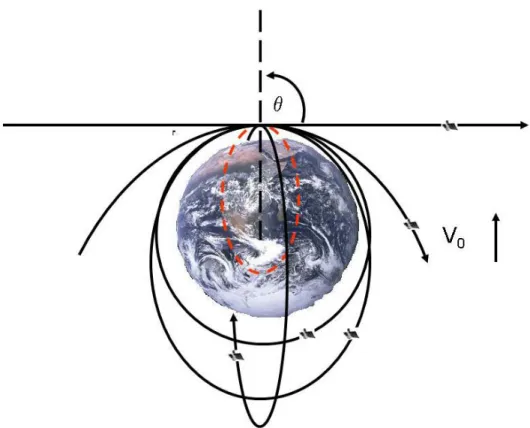
Gb 2-7 Keluarga lintasan dengan sudut pelontaran θ=π/2 sebagai fungsi V0. Segala macam
bentuk orbit bisa terjadi ; lingkaran, elips, parabola, jatuh bebas dan hiperbola
Pengaruh kecepatan lontar menunjukkan apabila ia terlalu besar maka satelit akan lepas dari gaya gravitasi Bumi, bila kecepatannya terlalu kecil maka ia akan jatuh ke Bumi. Untuk menempatkan satelit agar tetap mengorbit Bumi diperlukan kecepatan lontar V yang memenuhi syarat Vf < V < Vp dalam hal ini seperti biasanya Vp adalah kecepatan parabola/kecepatan lepas
dan Vf kecepatan jatuh satelit. Syarat ini didaftarkan dalam Tabel 2. berikut
Tabel 2. 1 Batas bawah dan batas atas bagi kecepatan lontar V0 untuk berbagai ketinggian dari permukaan Bumi
No H0 [km] Vf [km/det] Vp [km/det] 1 0 7,91 11,19 2 500 7,47 10,77 3 1000 7,06 10,40 4 1500 6,68 10,06 5 2000 6,34 9,76
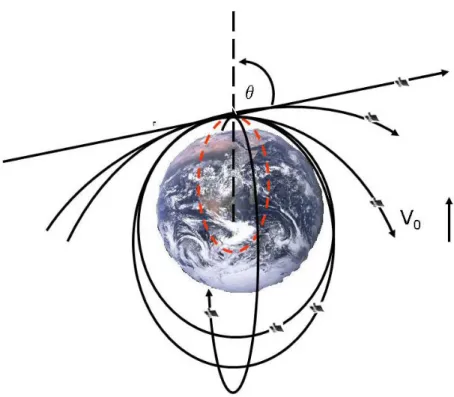
Gb.2-8 Keluarga lintasan dengan sudut pelontaran θ ≠ π/2 sebagai fungsi V0. Orbit lingkaran
tidak pernah terjadi. Bentuk orbit yang bisa terjadi adalah, elips, parabola, jatuh bebas dan hiperbola
Dari Tabel 2.1 diatas dapat dilihat bahwa kecepatan jatuh sedikit lebih kecil dari kecepatan lingkaran. Dipermukaan Bumi kecepatan jatuh sama dengan kecepatan linier rotasi Bumi. selain itu terlihat juga bahwa makin rendah titik pelontaran makin besar pula V0 yang kita perlukan,
hal ini dapat dimengerti karena didekat Bumi percepatan gravitasi yang menarik satelit menjadi lebih besar. Atau dengan perkataan lain energi yang diperlukan untuk melontarkan satelit berbanding terbalik dengan jarak satelit dari permukaan Bumi. Setiap model satelit diberi nama berdasarkan misi ataupun tipe orbitnya biasanya, nama satelit merupakan singkatan dari projek yang sedang diembannya. Berikut ini didaftarkan beberapa satelit buatan yang telah diketahui, misi utamanya dan tipe orbitnya.
Tabel 2-2 : Daftar satelit berdasarkan misi yang diembannya
No Satellite Nama Lengkap
1. ADEOS/RIS ADvanced Earth Observing Satellite/ Reflector In
Space
2. ADEOS-2 ADvanced Earth Observing Satellite 2
6. BE-C Beacon Explorer C
7. CHAMP CHAllenging Microsatellite Payload
8.
Envisat ENVIronmental SATellite
9. ERS-X Earth Remote Sensing Satellite X
10. ETS-VIII Engineering Test Satellite VIII
11. FIZEAU METEOR 2-21
12. GSTB-V2/A Galileo System Test Bed V2/A
13. GSTB-V2/B Galileo System Test Bed V2/AB
14. GEOS-X Geodetic Earth Orbiting Satellite X
15. GFO-1 Geosat Follow-On 1
16. GFZ-1 GeoForschungsZentrum 1
17. GLONASS-X GLObal NAvigation Satellite System X
18. GOCE Gravity Field and Steady-State Ocean Circulation
Mission
19. GP-B Gravity Probe B
20. GPS-X Global Positioning System X
21. GRACE Gravity Recovery and Climate Experiment
22. H2A-LRE Laser Retroreflector Experiment
23. ICESat Ice, Cloud, and land Elevation Satellite
24. IRS-P5 Indian Remote Sensing Satellite P5
25. Jason-1 TOPEX Follow-On
26. LAGEOS-X LAser GEOdynamics Satellite X
27. MSTI-2 Miniature Sensor Technology Integration 2
28. NPOESS National Polar-orbiting Operational Environmental
Satellite
29. OICETS Optical Inter-orbit Communications Engineering
Satellite
30. STARSHINE-X Student-Tracked Atmospheric Research Satellite for Heuristic International Networking Experiment-X
31. SUNSAT Stellenbosch UNiversity SATellite
32. TiPS Tether Physics and Survivability Mission
33. TOPEX/Poseidon TOPography EXperiment
34. VCL Vegitation Canopy Lidar
Tabel. 2-3 Nama satelit, informasi tentang orbit, misi utama yang diemban dan instrumen yang dibawa ( download 19 Februari 2008 dari http://Ilrs.gsfc.nasa.gov/satellite_missions)
No Satellite Primary Application i e Perigee (km) Apogee (km) Period (min) 1. ADEOS/RIS Earth Sensing 98.6° 0.000 815 815 101 2. ADEOS-2 Earth Sensing 98.62° 0.000 802.9 101 3. AJISAI Geodynamic s 50° 0.001 1,485 1,505 116 4. Apollo 11 Sea of Tranquility Lunar Science 5.145° 0.0549 356,400 406,700 29.53 days 5.
Apollo 14 Fra Mauro Lunar
Science 5.145° 0.0549 356,400 406,700 29.53 days 6. Apollo 15 Hadley Rille Lunar Science 5.145° 0.0549 356,400 406,700 29.53 days 7. BE-C Earth Sensing 41.2° 0.025 927 1,320 8. DIADEM-1C Geodynamic s 39.9° 0.037 545 1,085 101 9. DIADEM-1D Geodynamic s 39.5° 0.076 585 1,735 108 10. ERS-2 Earth Sensing 98.6° 0.0018 800 800 101 11. ETALON-1 Space Experiments 65.3° 0.00061 19,105 19,170 676 12. ETALON-2 Geodynamic s 65.2° 0.00066 19,135 19,135 675 13. FIZEAU Earth Sensing 82.6° 0.002 950 985 104 14. GEOS-1 Earth Sensing 59.4° 0.073 1,108 2,277 120 15. GEOS-2 Earth Sensing 105.8° 0.033 1,077 1,569 112 16. GEOS-3 Earth Sensing 115.0° 0.001 841 856 102 17. GFO-1 Earth Sensing 107.98 46° 0.001 800 800 100 18. GFZ-1 Geodynamic s 51.6° 0.000 385 385 92 19. GLONASS(49-97) Positioning 64° 0.000 19,140 19,140 676 20. GPS-35 Positioning 54.2° 0.000 20,195 20,195 718 21. GPS-36 Positioning 55.0° 0.006 20,030 20,355 718 22.
23. LAGEOS-2 Geodynamic s 52.64° 0.0135 5,625 5,960 222 24. Luna 17 Sea of Rains Lunar Science 5.145° 0.0549 356,400 406,700 29.53 days 25. Luna 21 Sea of Serenity Lunar Science 5.145° 0.0549 356,400 406,700 29.53 days 26. RESURS-01-3 Earth Sensing 97.9° 0.000 675 675 98 27. SEASAT Earth Sensing 108° 0.001 793 805 100 28. Starlette Geodynamic s 49.83° 0.0206 815 1,115 104 29. Stella Geodynamic s 98.6° 0.000 815 815 101 30. SUNSAT Earth Sensing 96.5° 0.015 400 830 100 31. TiPS Tether Science 63.4° 0.001 1,025 1,045 106 32. TOPEX/Poseidon Earth Sensing 66° 0.000 1,350 1,350 112 33. WESTPAC-1 Geodynamic s 98° 0.0 835 835 101 34. ZEYA Satellite Tests 97.27° 0.000 471 499 94
Data dalam tabel diatas, masih terus berubah dengan cepat karena hampir tiap bulan ada satelit baru yang diluncurkan, pembaca yang mempunyai fasilitas internet dapat memperbaharui informasi ini dengan berselancar di situs http://Ilrs.gsfc.nasa.gov/satellite_missions Sebagaian dari data tersebut ditunjukkan pada Lampiran 2
2.3 Transfer Orbit
Definisi: Impulse adalah gaya yang bekerja dalam interval waktu yang sangat singkat dari t0
sampaii t1 dengan t0 ≅ t1. Jadi dapat ditulis
∫
= 1 0 t t Fdt I (2-32)∫
→ = 1 0 0 1 t t Fdt t t Lim I =∫
= − = − → 1 0 0 1 0 1 0 1 ) ( ) ( t t mV mV t mV t mV dt dt dv m t t Lim (2-33)Dalam gambar 2-8 diragakan hubungan impulse I dan kecepatan V
Gb 2-9 Hubungan antara impulse I dan kecepatan awal V0 dan perkalian skalar dua
vektor I V0 IV Cos0
→ →
• = θ. Sedangkan, norm dari perkalian vektor | I x V0 | = IV0 Sin θ
Keubahan energi akibat adanya impulse ini diberikan oleh persamaan (2-34)
(
2)
0 2 1 2 1 V V m E = − Δ =(
1 0)(
1 0)
2 1 V V V V m − + = 1I2 I .V0 2 → → + (2-34)Dalam hal ini kita lihat bahwa bila; 1. I tegak lurus .V0 → ΔE minimum
2. I sejajar dengan V0→ ΔE maksimum
3. Momentum sudut L = r x mV
4. Perubahan momentum sudut ΔL = L2- L0 = r x I
Norm dari keubahan momentum sudut;
| r x I | = r I Sin θ (2-35)
Jadi dapat dilihat bila;
1. r tegak lurus I maka ΔL maksimum 2. r sejajar I maka ΔL minimum
Jadi perubahan setengah sumbu panjang berbanding langsung dengan energi total sistem, jika ΔE membesar maka Δa juga membesar, demikian pula sebaliknya
Akibat adanya impulse dapat mempengaruhi orbit dalam bentuk; 1. mengubah periode
2. mengubah eksentrisitas
Gb 2-10 Akibat adanya impulse terjadi perubahan periode dan eksentrisitas orbit dalam kasus ini kecepatan awal dan akhir selalu tangensial terhadap lintasan satelit. Garis tebal orbit awal, garis putus-putus orbit akhir
2.4 Transfer Hohmann
Alih orbit dari bentuk lingkaran ke bentuk lingkaran dikenal dengan nama transfer Hohmann, ilustrasi transfer diragakan dalam Gb. 2-10. Ciri dari transfer Hohmann adalah bergerak dari orbit semula lingkaran ke orbit lain yang berbentuk lingkaran pula, sedangkan orbit transfer berbentuk elips. Transfer Hohmann merupakan cara yang paling sering digunakan untuk menempatkan satelit pada orbitnya yang tetap (parking orbit)
Gb 2-11 Transfer orbit model Hohmann dimulai dari lingakaran kecil( r = a0 ) kemudian
menjadi elips ( 2a = a0 + a1 ) selanjutnya berubah lagi menjadi lingkaran besar
Dalam hal ini berlaku pernyataan; 0 0 0 V j V j a → μ → → = = sedangkan 1 1 1 V j V j a → μ → → = − = − (2-37)
Impulse pada titik A dan B diberikan oleh;
0 0
A
I =V′− sedangkan V IB= − V1′ V1 (2-38)
Untuk tahap kedua orbit elips; ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − = a r V2 μ 2 1 disini berlaku a = (a1 + a0)/2
Jadi kecepatan transfer dititik A dan B adalah;
0 0 2 1 V a a ⎛ ⎞ ′ = μ⎜ − ⎟ ⎝ ⎠ = ⎟⎟⎠ ⎞ ⎜⎜ ⎝ ⎛ − a a a a 0 2 μ = ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + 0 1 1 0 2 a a a a μ = ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + 1 0 1 0 2 a a a V (2-39) 1 1 2 1 V a a ⎛ ⎞ ′= μ⎜ − ⎟ ⎝ ⎠ = ⎟⎟⎠ ⎞ ⎜⎜ ⎝ ⎛ − a a a a 1 1 2 μ = ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + 0 1 0 1 2 a a a a μ = ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + 1 0 0 1 2 a a a V (2-40)
Dalam bentuk vektor dapat ditulis
1 0 0 0 1 2a V V j a a → ⎛ ⎞→ ′ = ⎜ ⎟ + ⎝ ⎠ dan 0 1 1 0 1 2a V V j a a → ⎛ ⎞→ ′= − ⎜ ⎟ + ⎝ ⎠ (2-41)
Oleh sebab itu diperoleh;
1/ 2 1 0 0 1 2 1 A a I V j a a → ⎡⎛ ⎞ ⎤→ ⎢ ⎥ = ⎜ ⎟ − + ⎢⎝ ⎠ ⎥ ⎣ ⎦ (2-42)
1/ 2 0 1 0 1 2 1 B a I V j a a → ⎡⎛ ⎞ ⎤→ ⎢ ⎥ = − ⎜ ⎟ − + ⎢⎝ ⎠ ⎥ ⎣ ⎦ (2-43)
Impulse yang diperlukan untuk melakukan perpindahan orbit dari lingkaran kecil ke lingkaran besar adalah; → → → → → • = → + =I I I I I I A B 2 (2-44) diperoleh; 1 2 / 1 1 0 0 0 2 / 1 1 0 1 1 2 1 2 V a a a V a a a I ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ − ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + + ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ − ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + = (2-45)
Perubahan energi pada titik A dan B adalah
2 1 2 awal E I I V → → Δ = + • (2-46)
Dengan menilik pada masing-masing titik diperoleh; Manuver tunggal perubahan kecepatan pada titik A adalah;
⎥ ⎦ ⎤ ⎢ ⎣ ⎡ + − = Δ 0 1 0 1 2 0 2 1 a a a a V EA dan ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ + − = Δ 0 1 0 1 2 1 2 1 a a a a V EB (2-47)
Sehingga energi total yang dibutuhkan untuk melakukan transfer Hohmann adalah; ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ + − + = Δ 0 1 0 1 2 1 2 0 ) ( 2 1 a a a a V V E (2-48)
Pada dasarnya ada dua tipe manuver untuk mengubah orbit, yaitu manuver tunggal dan manuver ganda
Untuk manuver tunggal:
Perubahan kecepatan pada titik A adalah;
h l V
V V = −
Δ (2-52)
Dalam hal ini Vl adalah kecepatan lingkaran, Vp kecepatan lepas/parabola dan Vh kecepatan
hiperbola, bila kecepatan orbit pada titik tujuan adalahV∞ maka berlaku;
2 / 1 2 2 2 2 [ 2 ] A h p h r V V V V V = ∞ + → = ∞ + μ (2-53) 2 / 1 ] [ A h r V = μ (2-54)
Energi kinetis pada posisi r → ∞ adalah ;
A h
r V
V∞2 = 2−2μ (2-55)
Dengan demikian peubahan kecepatan yang diperlukan untuk manuver tunggal adalah
μ
Gb 2-12 Manuver ganda dan manuver tunggal.Untuk manuver tunggal, transfer orbit dilakukan dari orbit asal langsung ke orbit tujuan. Untuk manuver ganda perpindahan orbit dilakukan setelah satelit mengubah orbit lingkaran menjadi lintasan elips setelah melengkapi orbitnya, pada titik perige wahana
memanfaatkan energi kinetik maksimum untuk berpindahke orbit lingkaran yang lebih besar
Untuk manuver ganda
Perubahan kecepatan pada titik A;
] ( ) ( l B h A A V V V V V = − + − Δ (2-57)
Kecepatan orbit dititik A(kecepatan eliptik) ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + − = B A A A r r r V 2 2μ 1 1 (2-58)
Kecepatan eliptik di titik B
⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + − = B A B B r r r V 2 2μ 1 1 (2-59)
Perubahan kecepatan adalah;
(2-60) Definisikan efisiensi transfer orbit dengan parameter berikut;
(2-61) (2-62)
Rasio manuver ganda dan tunggal dalam parameter berikut
, (2-63)
Besaran ini disebut efisiensi, selanjutnya tinjau beberapa kasus a) jika rasio 2 2 P V V∞ → 0 akibatnya α → 2 jadi 2 1 2 1 − − + − = β β Q (2-64)
jika kita ambil limitnya;
1 2 0 Q Q Lim Lim r B r A = = β → → (2-65) ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ + + + − = Δ 1 2(1 ) 2( ∞ ) 2 2 B A P B A l A r r V V r r V V , 1 2 2 2 ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + = ∞ P V V α ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + = B A V r 1 2 β α β α β − − + + − = Δ Δ = 1 4 1 tunggal V ganda V Q A A
b) sedangkan bila diambil ; →∞ B A r r maka; 41 . 0 lim = ∞ → = ∞ → Q Q r r Lim A B β (2-66)
Kesimpulan yang dapat diambil dari pernyataan (2-66) adalah efisiensi akan mencapai; 1) 100% bila dapat dibuat rA >> rB
2) 41% bila dapat dibuat rB >> rA
Jika β dibuat tetap sedangkan 22
P V V∞ → ∞ maka 1 4 Lim Q lim 1 − β + β + α − = α → ∞ α → ∞ α − (2-67)
Atau dapat juga ditulis dengan menggunakan teorema l’Hospital bahwa pernyatan (2-67) identik dengan 1 1 Lim Q lim 1 Lim 4 4 α→∞ 1 − α − α = = α → ∞ α → ∞ α + β − +β − α = 1
Pernyatan ini menyatakan bahwa akan dicapai efisiensi sebesar 100% dengan kata lain manuver dengan kecepatan akhir VP dan orbit alih yang mempunyai perige di titik A akan
lebih menguntungkan daripada manuver tunggal
2.5 Gerak Partikel yang Mengalami Perpindahan Pusat Gaya
Sentral dari Satu Titik Fokus ke Titik Fokus yang Lain
Gb.2-13 Lintasan elips dan besaran geometrinya. Mula-mula partikel berada pada posisi dengan pusat gaya titik A, kemudian bergerak ke posisi lain dengan pusat gaya berada pada titik B
Misalkan p, menyatakan perilotusrectum pada saat pusat gaya ada di titik A dan p’, menyatakan perilotusrectum pada saat pusat gaya ada di B. Berdasarkan kaedah hokum Kepler pada kedua posisi ini berlaku pernyataan;
μ / ) 1 ( 2 2 h e a p = − = (2-68) p′ =a(1−e2)=h2/μ (2-69)
Gaya dipindahkan dari fokus A ke B Misalkan AB=k maka c’= c-k,
(1 ) (1 ) c c k c k k e e a a a c c ′ − ′ = = = − = − (2-70)
Selain itu diketahui pula ; 2 2 1 1 1 ( ) e e − = ′
− , kalikan besaran ini dengan 1 2 r r maka diperoleh; ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − − = ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − 2 1 2 2 2 1 2 1 1 a k c r r a c r r (2-71) Atau dapat dinyatakan dalam bentuk;
[
2 − 2 − 2+ 2 − + 2]
= 2 a c a c 2kc k r[
]
0 2 2 2 − kc+k = r (2-72)) ( ) ( 2 2 1 2 c a c a c r cr k − + = = (2-73) 2 ( ) (3 / ) (3 ) (1 ) (1 ) ( ) (1 / ) 1 k c a c a c a e c e e e e c a c c a c a e ⎛ ⎞ + + + ′ = − = − = ⎜ ⎟= − ⎝ − ⎠ − (2-74)
2.6 Eksentrisitas Gerak Hiperbola
Sebuah partikel bergerak dengan gaya repulsive 2
r
F = μ menjauhi titik asal, mula-mula
gerak orbitnya berbentuk elips, pada titik yang berjarak c dari pusat gaya sentral partikel tersebut dilempar dengan kecepatan
c
V2 = μ, akan ditentukan eksentrisitas orbit .Partikel yang
bergerak dibawah gaya repulsive 2
r
F = μ memenuhi
(2-75) persamaan energi ini memperlihatkan energi total system partikel E, selalu bernilai positif Dari teori tentang problem dua benda kita ketahui persamaan energi partikel yang bergerak dibawah gaya tarik gravitasi 2
r
F =− μ untuk jarak r=c energi total system adalah,
E c m mV2 −μ = 2 1 (2-76) misalkan h c2 • = θ , c u= dan 1 c h V c •
θ = = substitusi ketiga pernyataan ini kedalam persamaan energi diatas kita peroleh persamaan kuadrat dalam bentuk u,
0 2 1 2 2 − − = E mu u mh μ (2-77)
sehingga kita peroleh akar persamaan,
m Eh h h u 2 2 2 2 , 1 2 1 μ μ μ ± + =
nilai maksimum dan minimum memenuhi pernyataan,
m Eh h h u 2 2 2 max 2 1 μ μ μ + + = dan m Eh h h u 2 2 2 min 2 1 μ μ μ − + = (2-78)
Bandingkan bentuknya dalam koordinat polar μ E c m mV2 +μ = 2 1
θ dan kecepatan lontar V Dalm bentuk ini nilai u maksimum diperoleh bila Cos
(
θ−ω)
=0 atau θ =ω dengan perkatan lain;2 max h A u = + μ (2-80) Jadi 2 / 1 2 2 2 2 1 ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + = m Eh h A μ μ (2-81)
selain itu diketahui juga
2 h
e
A= μ (2-82)
jadi eksentrisitas haruslah memenuhi pernyataan,
2 / 1 2 2 2 2 1 ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + = = m Eh Ah e μ μ (2-83)
dari pernyataan ini jelas bahwa nilai e akan sangat ditentukan oleh tanda aljabar dan besaran energi E, yaitu jika E=0 maka lintasannya berbentuk parabola(e=1) dan jika lintasannya berbentuk hiperbola( e>1) haruslah energi E berharga positif, sedangkan untuk lintasan elips (0<e<1), E harus negatif. Selanjutnya perhatikan pernyataan berikut,
(
)
μ 2 2 1 e h a p= − = (2-84)atau nyatakan h dalam bentuk persamaan energi
(
)
m a Eh m Eh a e a h μ μ μ μ 1 2 ]1/2 1 1 2 2 2 2 2 [ ⎟⎟=− ⎠ ⎞ ⎜⎜ ⎝ ⎛ − − = − = (2-85)dengan demikian energi untuk lintasan yang berbentuk elips dapat ditulis sebagai,
a m E 2 μ − = (2-86)
masukkan kedalam persamaan energi
a m c m mV 2 2 1 2−μ =−μ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − = → a c V 2 1 1 2 2 μ (2-87)
Sedangkan untuk lintasan hiperbola,
a m E 2 μ = , diperoleh a m c m mV 2 2 1 2−μ = μ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + = → a c V 2 1 1 2 2 μ (2-88)
Karena partikel dilempar dengan kecepatan
c
V = μ kecepatan ini tentulah harus sama dengan
kecepatan teoritis diatas, jadi
2 2 1 1 2 V a c a c c μ μ μ → =− = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + = (2-89)
Selain itu telah diketahui bahwa
μ 2 2) 1 ( e h a p= − = atau ac e= 1− 1 (2-90)
ganti a dengan –c maka
2
1 1
c
e= + (2-91)
Jelas bahwa eksentrisitas hanya bergantung pada konstanta c saja. Orbit berbentuk hiperbola
2.7 Perubahan massa roket yang bergerak dari orbit lingkaran dengan
kecepatan V
lmenjadi lintasan parabola dengan kecepatan dorong V
gBerikut disampaikan sebuah ilustrasi sederhana tentang perubahan massa roket dan dampaknya pada kecepatan wahan bersangkutan.
Untuk menghitung berapa massa yang hilang setiap kali penembakan, perhatikanlah ilustrasi berikut ini;
Gb.2-14 Massa yang dilontarkan roket membuat roket terdorong ke depan, kecepatan roket bergantung pada kecepatan materi yang dilontarkan Menurut hukum kekekalan momentum, pada kasus ini berlaku, perubahan momentum sebelum, dan sesudah penembakan adalah tetap,
dp1+ dp2 = 0 (2-92)
Atau dapat ditulis kembali dalam bentuk 0 + = g dm dv V m dt dt → = − g dm dv V m (2-93)
Tinjau syarat batas t=0 roket masih mengorbit dalam bentuk lingkaran kecepatan roket Vl
massa total m0 setelah didorong pada saat t, orbit berubah menjadi parabola misalkan
kecepatannya menjadi Vp dan massanya mf
Catatan, rasio kecepatan parabola/kecepatan lingkaran =√2 Jadi f 0 m t g 0 m dm dv = -V m
∫
∫
(2-94) Jadi rasio massa final terhadap massa awal roket dapat ditulis kembali sebagai/ 0 − = V Vg f m e m (2-95)
dalam hal ini V=Vp−V1
Kecepatan relatif roket terhadap kecepatan lingkaran adalah 1
p
V=V −V, karena kecepatan lepas adalah √2 kali kecepatan melingkar maka dapat dinyatakan
1 1 1
2 0, 41
V= V − =V V (2-96)
Dengan demikian rasio massa roket sebelum dan sesudah mengubah lintasannya dari lingkaran menjadi parabola adalah,
g l V V f
e
m
m
0,41 0=
(2-97)Persamaan ini menyatakan bahwa bila; kecepatan dorong, Vg yang besar akan menyebabkan massa final semakin membesar, demikian pula sebaliknya kecepatan dorong rendah akan menyebabkan massa final semakin mengecil
Gb.2-15 Trajectory roket Ariane 4 ketika diluncurkan dari Kouru (Guyana, Amerika Selatan) diperlukan tiga kali penembakan untuk menempatkan satelit pada orbitnya
Semakin kecil Vg semakin besar pula massa awal yang hilang demikian pula sebaliknya. Dalam hal kecepatan lontar Vg =2,8 km/det dan kecepatan wahana pada orbit lingkaran, Vl = 5 km/det
maka rasio massa final dan awal roket tersebut adalah;
0
0, 5
≈
fm
m
(2-98)Artinya untuk mendapatkan kecepatan 5 km/det, maka setengah massa roket tadi akan hilang kalau kecepatan material yang disemburkan melaju dengan kecepatan 2,8 km/det. Gambar berikut meragakan penempatan sebuah satelit(payload) pada roket Ariane 4 dan roket Titan.
Gb. 2-16 Model roket Titan dan Ariane 4. Untuk Ariane 4 ada sembilan bagian utama
(1) First stage (L220), (2) Solid strap –on booster(PAP), (3) Liquid strap-on booster(PAL), (4) Inter-stage ½ skirt, (5) Second stage(L33), (6)Third stage(H10), (7) Vehicle equipment bay (VEB), (8) Dual launch structure(SPELDA) dan (9) Fairing. Sebelah kiri adalah profil roket Titan yang membawa wahana Cassiny
Contoh Soal latihan
SOAL 1
Sebuah projektil dilemparkan dari Planet X, projektil diharapkan tidak jatuh kembali ke Planet X. Bila tahanan udara diabaikan demikian pula pengaruh gravitasi dari benda langit yang lain. Buktikanlah kecepatan projektil tersebut pada jarak r dari Planet X mengikuti pernyataan berikut; 2 2 2 0 2 2 = gR + − v v gR r
Dalam hal ini R-Jejari Planet X
g-percepatan gravitasi planet X
v0 –kecepatan projektil di permukaan(r=R) planet X
Penyelesaian
Langkah 1: Pemodelan
Berdasarkan hukum gravitasi Newton, percepatan projektil tersebut adalah berbanding terbalik dengan jarak kuadrat
2 ( )=dv = k
a r
dt r (1)
dalam hal ini
v-kecepatan projektil tersebut t-waktu
k-konstanta pembanding r-jarak dari pusat gaya
Karena a mengecil bila r membesar maka pada partikel tersebut terjadi perlambatan , dengan demikian k<0
Bila r = R maka a = - g (percepatan gravitasi Planet X) Jadi; 2 2 ( ) − =g a R = k → = −k gR R (2) Gabungkan (2) ke (1) 2 ( )= −gR a r (3)
v dr dv dt dr dr dv dt dv a= = = akibatnya; 2 2 r gR v dr dv = − (4)
Langkah 2: Pecahkan persamaan diferensial, pisahkan variabel lalu integrasikan
∫
= −∫
→ = + → − = C r gR v 2 1 r dr gR vdv dr r gR vdv 2 2 2 2 2 2 (5)Langkah 3: Nyatakan C sebagai fungsi v0 dan besaran yang diketahui R dan g. Karena untuk
r=R kecepatannya adalah v0 , jadi
R gR v 2 1 C 2 2 0 − = (6) Dengan memasukkan C kedalam pernyataan (3) kita peroleh;
v 2gR r gR 2 v 2 0 2 2 = + −
Oleh karena v≠0 maka diperlukanV02 yang memenuhi syarat lebih besar dari 2gR. Kecepatan
minimal yang diizinkan adalah v0 = 2gR . Untuk Bumi, ganti R= 6372 km dan g=9,8 m/det2 (percepatan gravitasi di ekuator) kita peroleh, v0 = 11,2 km/det
Soal 2: Sebuah wahana antariksa akan dijatuhkan di planet X. Pada saat parasut terbuka(t = 0)
wahana mempunyai kecepatan awal, v(0) = 10 km/jam. Tentukan kecepatan wahana tersebut pada waktu t sembarang v(t). Apakah kecepatan, v(t) akan menuju tak terhingga bila t menuju tak terhingga ?
Penyelesaian
Langkah 1: Modeling dan asumsi-asumsi
Misalkan
W-berat total dari wahana tersebut dan g-percepatan gravitasi U-tahanan udara, berbanding kuadrat dengan kecepatan U=bv2
Langkah2: Selesaikan persamaan diferensial
= − ⎡⎢ 2− ⎤⎥= − ⎡⎣ 2− 2⎤⎦
⎣ ⎦
dv b gm b
v v k
dt m b m (1)
dalam hal ini;
2 = gm
k b
Dapat juga ditulis;
2− 2 = − dv b dt v k m (2) Perhatikan bentuk 2 2 2 2 1 1 ( ) ( ) ( )( ) ( ) ( ) + + − + = = + = − + − + − − A B v A B k A B v k v k v k v k v k v k U W Hukum Newton; F=ma 2 2 v m b g dt dv dt dv m bv mg ma U W − = → = − = −
(A+B) = 0 dan (–A+B)= 1/k diperoleh A= -1/2k dan B= 1/2k Integrasikan persamaan (2) 2 2 1 1 1 2 ( ) 2 ( ) = − + = − ∫ − dv ∫ dv+ ∫ dv− b ∫dt v k k v k k v k m atau ; ln v k 2k b t c v k m − ⎡ ⎤= ⎛− + ⎞ ⎜ ⎟ ⎢ + ⎥ ⎣ ⎦ ⎝ ⎠
disederhanakan kita peroleh bentuk 2 ⎡⎢− + ⎤⎥ ⎣ ⎦ − ⎡ ⎤ = ⎢ + ⎥ ⎣ ⎦ b k t C m v k e v k atau ; 0 0 1 1 − − ⎡ + ⎤ = ⎢ − ⎥ ⎣ ⎦ pt pt c e v k c e
dalam hal ini; 2 = kb p m dan 2 0 = kC c e
Kita lihat jika v→k maka 0 0
−pt →
c e artinya t→ ∞
Hal lain yang menarik adalah ternyata v tidak bergantung pada v0
Langkah 3: Menentukan konstanta c0
Untuk t=0 maka v= v0 jadi
0 0 0 0 0 0 1 1 ⎡ + ⎤ − = ⎢ ⎥→ = − + ⎣ ⎦ c v k v k c c v k
Dengan demikian urutan perhitungan menjadi; 1. Hitung;
=k W == gm
2. Hitung; p= 2kb m 3. Hitung; 0 0 0 0 0 0 1 1 ⎡ + ⎤ − = ⎢ ⎥→ = − + ⎣ ⎦ c v k v k c c v k 4. Hitung; 0 0 1 1 − − ⎡ + ⎤ = ⎢ − ⎥ ⎣ ⎦ pt pt c e v k c e
Langkah 4: Andaikan nilai numerik untuk wahana yang dijatuhkan di Bumi adalah sebagai
berikut;
W = 712 nt kecepatan awal v0 = 10km/det, percepatan gravitasi g = 9,8 m/det2 dan b = 30 nt
det2/m2 akibatnya;
2 = gm=W =23, 7 2/ det2 → =4,87 / det
k m k m
b b
ini adalah batas kecepatan minimal untuk nilai c0 = 0,345
untuk nilai p; 2 2.4,87.30 4, 02 / det 72, 7 = kb = = p m
Akibatnya kita peroleh kecepatannya sebagai fungsi waktu; 4,02 4,02 1 0,345 ( ) 4,87 1 0,345 − − + ⎡ ⎤ = ⎢ ⎥ − ⎣ ⎦ t t e v t e
Dalam pernyataan ini dapat dilihat bila t→ 0 kita peroleh v = 10km/det sedangkan untuk t→ ∞ diperoleh v = 4,87 km/det, bandingkan dengan kecepatan linier rotasi Bumi v = 7,92 km/det