ANALISIS DESAIN AWAL RANCANG BANGUN REMOTELY OPERATED VEHICLE ( ROV )
Shanty Manullang, Agustinus P. Kindangen, Shahrin febrian Agus Setiawan*)
* Mahasiswa pada Program Studi Teknik Perkapalan, **Dosen pada Program Studi Teknik Sistem Perkapalan,
Fakultas Teknologi Kelautan [email protected]
Abstrak
Penelitian ini dilaksanakan dengan tujuan untuk membuat robot bawah air atau Remotely Operated Vehicle (ROV) dan menguji kinerjanya di dalam air. Penelitian ini dilaksanakan untuk mengetahui sistem kekedapan pada ROV dengan menggunakan sebuah body yang di gunakan sebagai penutup dari pada setiap komponen yang ada pada ROV serta menguji pergerakannya di dalam air. Perancangan mini ROV dipadukan dalam beberapa proses perancangan yaitu perencanaan perhitungan setiap pemilihan komponen yang di pakai ROV, pembuatan desain, perancangan konstruksi mekanik, perancangan konstruksi elektronik, dan tahapan terakhir adalah integrasi dari keseluruhan proses perancangan tersebut. Hasil integrasi ini berupa bentuk fisik mini ROV, sistem elektronik, dan program antarmuka grafis. ROV ini diberi nama “AF-150114” . Robot yang dirancang merupakan robot bawah air yang dapat melakukan pergerakan di dalam air dengan sumbu X, Y dan Z. Robot ROV yang di buat dengan memiliki dimensi total panjang 65 cm, lebar 50 cm, dan tinggi 25 cm. Pada body ROV di buat menggunakan bahan dasar dari fiberglass yang setiap celah di lapisi dengan sheal agar kekedapan ROV dapat terjaga dengan baik. Pada sistem pergerakan ROV mengunakan 2 daun baling-baling untuk maju dan mundur serta untuk menenggelamkan atau menaikan ROV menggunakan sistem pompa ballast.
Kata kunci : ROV, Rancang Bangun, Pergerakan, Integrasi, pompa bllast
1. Pendahuluan
Perkembangan ROV di dunia sudah pesat.Seiring berkembangnya ilmu pengetahuan dan teknologi ROV dikembangkan mulai dari ukuran yang besar hingga yang kecil bahkan ukurannya sudah dalam mikro. Namun sayangnya, perkembangan ini tidak diikuti secara baik di Indonesia. Di Indonesia hanya ada beberapa ROV yang dikembangkan. Kondisi ini yang
membuat penulis ingin membuat dan merancang ROV yang dapat digunakan sebagai wahana eksplorasi bawah laut.
Namun untuk perkembangan teknologi bawah air kurang mendapat perhatian dari masyarakat. Masih banyak kegiatan bawah air yang dilakukan dengan cara konvensional seperti pengamatan bawah laut, pemantauan keretakan bendungan, survey terhadap sumber daya alam bawah air, pencarian korban bencana alam atau kapal tenggelam serta masih banyak lagi kegiatan bawah air selama ini dilakukan secara konvensional oleh manusia.
Pengamatan di bawah air tersebut memiliki beberapa resiko yaitu adanya area-area yang sulit dijangkau manusia, perairan yang terkena limbah beracun, terbatasnya oksigen, terjadinya tekanan hidrostatik pada tubuh penyelam, serta resiko bahaya yang tinggi akibat serangan hewan buas dan lain sebagainya. Oleh karena itu, robot yangmampu bergerak bebas di dalam air sangat dibutuhkan untuk membantu tugas manusia.
Menurut Committee on UnderseaVehicles and National Secara umum undersea vehicles terdiri atas vehicles yangdapat dikendarai manusia atau istilah pengganti yang digunakan oleh
Committee sebagai “ manned ”, dan vehicles kosong atau tanpa awak dengan istilah pengganti “ unmanned ”(Mooney, Jr., et al., 1996:viii).
Secara luas undersea vehicles terdiri atas deep submersible vehicles (DSV) yang manaDSV ini termasuk pada golongan " manned ". Untuk vehicles “ unmanned ” sendiri terdiri atas Remotely Operated Vehicles atau disingkat ROV dan Autonomous UnderwaterVehicles atau disingkat AUV (Mooney, et al.,1996:viii).
AUV adalah kendaraan bawah air yang mampu bergerak didalam air secara otomatis tanpa adanya kontrol langsung dari manusia sedangkan, sedangkan ROV adalah kendaraan bawah air yang gerakannya dapat dikendalikan secara langsung oleh manusia melalui remote
control dari atas permukaan air. Untuk saat ini, pengembangan robot bawah air lebih ditekankan
pada ROV dibandingkan dengan AUV karena ROV memiliki kelebihan untuk menjalankan tugas-tugas yang menuntut ketelitian dan keakuratan
Tujuan dari penelitian ini adalah membuat design Remote Operated Vehicles(ROV),Merancang robot bawah air (underwater) berbasis remote control, Mencoba
2. Metode Penelitian
Dalam penelitian ini menggunakan metode Penelitian dan Pengembangan (Research and
Development/R&D). Sedangkan analisa yang digunakan adalah analisa S.M.A.R.T yaitu Specific, Measurable, Achievable, Realistic dan Time-based. Perancangan penelitian meliputi
perancangan hardware dan software.
Menurut Borg and Gall (Borg, 1989), “educational research and development is aprocess
used to develop and validate educational product”. Atau dapat diartikan bahwa penelitian
pengembangan pendidikan adalah sebuah proses yang digunakan untuk mengembangkan dan memvalidasi produk pendidikan.
Sedangkan metode perancangan ROV yang dipakai adalah memakai hukum Archimedes, untuk :
Tenggelam
Sebuah benda yang dicelupkan ke dalam zat cairakan tenggelam jika berat benda (w) lebih besar dari gaya ke atas (Fa).
w > Fa ….(2) Keterangan :
W= masa jenis (kg/m3) Fa = gaya ke atas (N)
Melayang
Sebuah benda yang dicelupkan ke dalam zat cair akan melayang jika berat benda (w)sama dengan gaya ke atas (Fa) atu benda tersebut tersebut dalam keadaan setimbang
w = Fa ….(3)
Keterangan :
W= masa jenis (kg/m3) Fa = gaya ke atas (N)
Terapung
Sebuah benda yang dicelupkan ke dalam zat cair akan terapung jika berat benda (w) lebih kecil dari gaya ke atas (Fa).
w < Fa ….(4)
Keterangan :
W= masa jenis (kg/m3) Fa = gaya ke atas (N)
3. Perancangan Penelitian ROV
ROV yang diberi nama AF-150114 yang berfungsi melihat kondisi lingkungan bawah air secara visual. AF-150114 dapat diklasifikasikan ke dalam mini ROV classobservasi (Christ dan Wernli, 2007), kelas 1 – Murni Observasi dan kelas V Prototipe atau wahana yang dalam
pengembangan (Norsok Standard, 2003). Pada pembuatan ROV ini sebelumya menentukan komponen utama yang akan di gunakan pada ROV AF-150114.
Perancangan tersebut antara lain
1. Rangkaian elektronik . Rangkaian elektronik pada pembuatan robot bawah air ini menggunakan Sanyou SARM-S-105D4. Rangkaian sirkuit dasar SanyouSARM-S-105D4sudah memiliki jalur input/output 32 pin, jalur komunikasi serial RS232 dengan konektor RJ11, dan terdapat port untuk pemograman secara baik.
Sanyou SARM-S-105D4 ini terdiri dari regulator pada papan integrasi yang meregulasikantegangan sebesar 3,5 Volt) yang merupakan ADC (analog-to-digital converter) untuk membaca tegangan keluaran dari H48C. Semua komponen terintegrasi pada satu papan modul dengan ukuran :
Panjang = 17,8 mm Lebar = 20,3 mm.
2. Pembuatan Sistem Ballast ROV , Pada dasarnya, ada dua cara untuk menenggelamkan kapal selam yaitu dengan cara menyelam secara dinamis dan statis. Banyak model kapal selam menggunakan metode statis dan dinamis, saat menyelam pada umumnya digunakan oleh semua kapal selam militer. Sistem dinamis adalah sistem dengan metode penyelaman dinamis dimana kapal selam menggunakan sirip (hydroplane) dan dibantu dengan kecepatan dari kapal selam tersebut untuk membantu pergerakan kapal selam tersebut agar dapat menyelam dan mengapung di air. Pada perancangan AF-150114 ini menggunakan sistem ballast secaara statis dikarnakan pada ukuran utama yang relatif mini dan juga sangat mudah dalam proses pengaplikasikanya dan pembuatan sistem ballast secara statis.
3. Perancangan rangkaian motor prnggerak. Sistem rangkaian pada ROVAF-150114 mempunyai motor penggerak benjenis tenaga DC,
4. Perancangan Visual ROV, untuk perancangan pasa bagian ini terdiri dari beberapa bagian : a. Pencahayaan . Pencahayaan pada pada ROV di gunakan sebagai penerangan untuk visual atau camera robot, di karenakan semakin dalam perairan semakin sedikit juga cahaya yang bisa masuk pada perairan. Pada ROV ini mempunyai 2 lampu Led yang berukuran 2 cm yang di bungkus dengan konektor pipa yang berukuran 2,5 cm yang di lengkapi dengan sael agar terhidar dari pada masuknya air.
b. Visusal Camera, Kamera yang difungsikan sebagai visual robot untuk penglihatan pada ROV menggunakan kamera CCTV yang dilengkapi dengan cahaya infrared serta dilengkapai dengan sistem kekedapan air.
c. Perancangan sistem kontrol ROV. Sistem contol pada perancangan ROV ini menggunakan
switch3chanel untuk mengontrol pergerakan, pompa dan pencahayaan ROV
Pada pembuatan design ROV ini menggunakan beberapa softwaredesign 3d modeling seperti
Google Sketchup 3D dan Autocad 2D. di dasarkan pada proses pembuatan gambar awal serta
pencarian luas area dan volume sangat di butuhkan pada pembuatan design ROV jadi penulis menggunakan software tersebut.
Design komponen ROV (Sumber: Dok Pribadi)
Perencanaan design body ROV (Sumber: Dok Pribadi)
Pada gambar diatas adalah gambaran design dari body ROV yang akan menutupi setiap komponen yang di rencanakan. Setelah mendapatkan designbody dibuatlah proses modeling
yang menggunakan bantuan dari software Google Su8 yang sama dengan proses perencanaan pembuatan kekedapan ROV.
Keterengan : 1. Pcb Control 2. Submersible Pump 3. Motor penggerak 4. Rumah motor 5. Body thruster 6. Lampu pencahayaan 7. Tangki ballast 8. Kontruksi tangki 9. Penutup tangki 10. Body depan 11. Kamera visual 12. Penutup tangki udara 13. Body sikulasi air
14. Sayap/sirip penyeimbang
3. Hasil Analisa
Analisa pengisian tangki ballast
V Tangki (cm ³) Waktu (s) 5 10 15 20 25 D air (cm/s) 6.25 12.50 18.75 25.00 31.25 100 = 112.0 56.0 37.3 28.0 22.4 80 = 89.6 44.8 29.9 22.4 17.9 60 = 67.2 33.6 22.4 16.8 13.4 40 = 44.8 22.4 14.9 11.2 9.0 20 = 22.4 11.2 7.5 5.6 4.5
Jadi di hasilkan analisa tangki ballast untuk keperluan ROV yang di gunakan untuk menyelam dan mengapung membutuhkan pompa yang pempunyai kecepatan air (debit air) di ataran 12,50 cm/s sampai 25 cm/s. dengan waktu pengisian tangki sebesar 10 detik sampai 20
detik. Di karenakan ROV jenis klas observasi ini harus bisa menjaga keseimbangan dengan baik pada waktu di dalam air.
Jika diambil pada nilai kecepatan air (debit air) yang mempunyai nilai 6,25 cm/s di khawatirkan ROV sangat cepat untuk menyelam dan keseimbangan yang di miliki ROV kurang baik, begitupun sebaliknya, jika di ambil nilai dengan kecepatan air (debit air ) dengan nilai 31,25 di khawatirkan pada ROV mempunyai pergerakan yang kurang bagus untuk menyelam dikarnakan terlalu lama.
Analisis Pompa
Grafik 2. Perbandingan Pengujian Pompa (Sumber: Dok Pribadi)
Dari penyajian gambar dan tabel di atas pada tabel .7 dan pada gambar grafik 50Menunjukan perbedaan nilai pengujian pompa dari perhitungan dan percobaan . pada percobaan mempunyai kecepatan waktu pengisian yg lebih cepat dari pada perhitungan.
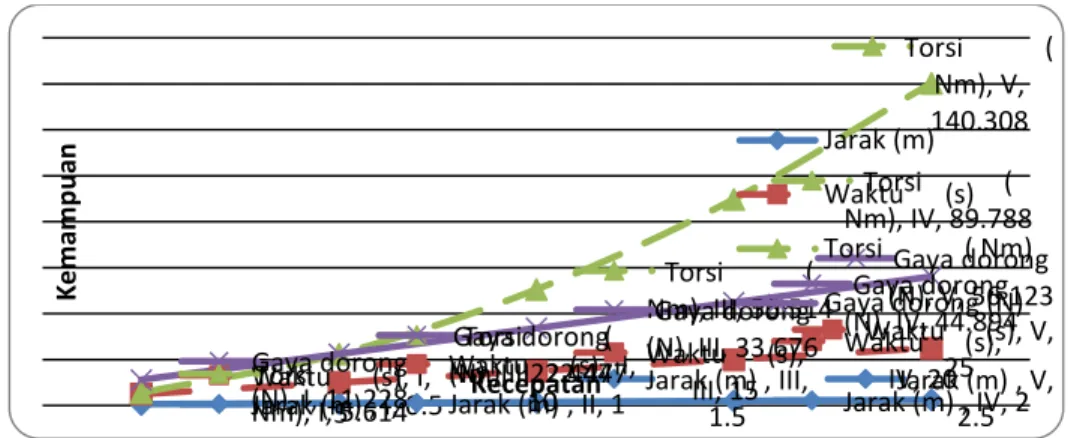
Kecepatan Jarak (m) Waktu (s) Berat ROV (w) Gaya dorong (kgm/s2) Gaya dorong (N) Daya Motor DC (Watt) Torsi ( Nm) I 0.5 5 2.289 1.145 11.228 0.164 5.614 II 1 10 2.289 2.289 22.447 0.327 22.447 III 1.5 15 2.289 3.434 33.676 0.491 50.514 IV 2 20 2.289 4.578 44.894 0.654 89.788 Percobaan , 100%, 5.89 Percobaan , 80%, 4.73 Percobaan , 60%, 3.57 Percobaan , 40%, 2.42Percobaan , 20%, 1.31 Perhitungan, 100%, 6.306 Perhitungan, 80%, 5.045 Perhitungan, 60%, 3.784 Perhitungan, 40%, 2.523 Perhitungan, 20%, 1.261 Wa kt u (s ) Volume Tangki (%) Percobaan Perhitungan
Grafik . Jarak dan Gaya dorong ROV (Sumber: Analisa Data)
Dari grafik terlihat bahwa semakin jauh jarak yang ditempuh oleh ROV, maka kekuatan dan gaya dorong semakin besar.
4. Pengujian pergerakan ROV
Pengujian ROV AF-150114 dilakukan pada sebuah kolam. Pada pengujian ini mengacu kepada metode awal yaitu tentang persamaan dari pada hukum Archimedes menyatakan sebagai berikut, “ Sebuah benda yang tercelup sebagian atau seluruhnya ke dalam zat cair akan
mengalami gaya ke atas yang besarnya sama dengan berat zat cair yang dipindahkannya.”
4.1 Pengujian Mengapung ROV
1. 850.929 kg/m3 <1000 kg/m3 memenuhi.
Gambar. Pengujian terapung 4.2 Pengujian Benda Melayang
Jarak (m) , I, 0.5 Jarak (m) , II, 1 Jarak (m) , III, 1.5 Jarak (m) , IV, 2Jarak (m) , V, 2.5 Waktu (s), I, 5 Waktu (s), II, 10 Waktu (s), III, 15 Waktu (s), IV, 20 Waktu (s), V, 25 Torsi ( Nm), I, 5.614 Torsi ( Nm), II, 22.447 Torsi ( Nm), III, 50.514 Torsi ( Nm), IV, 89.788 Torsi ( Nm), V, 140.308 Gaya dorong (N), I, 11.228 Gaya dorong (N), II, 22.447 Gaya dorong (N), III, 33.676 Gaya dorong (N), IV, 44.894 Gaya dorong (N), V, 56.123 K e m am p u an Kecepatan Jarak (m) Waktu (s) Torsi ( Nm) Gaya dorong (N)
Pada pengujian meyang di asumsikan masa jenis dari ROV AF-150114 dengan nilai 850.929 kg/m3 tidak memenuhi persamaan W = Fa, untuk pemenuhan persamaan ROV awal ini menggunakan pompa ballas sebesar 149,071 kg/m3 dengan penambahan berat ballas sebesar 0.244 kg agar ROV dapat memenuhi persamaan W = Fa.
Gambar 74. Pengujian melayang (Sumber: Dok Pribadi) 4.3 Pengujian Benda Tenggelam
Pada pengujian Tenggelam di asumsikan masa jenis dari ROV AF-150114 dengan nilai 850.929 kg/m3 tidak memenuhi persamaan W > Fa, untuk pemenuhan persamaan ROV awal ini menggunakan pompa ballas sebesar 300 kg/m3 dengan penambahan berat ballas sebesar 0.522 kg agar ROV dapat memenuhi persamaan W > Fa. Tetapi dasarnya penambahan berat ballas pada tangki agar dapat memenuhi persammaan W > Fa berat volume air yang masuk ke dalam tangki bisa lebih dari pada 150 kg/m3 atausesuai dengan keadaan yang di butuhkan.
ρ Total = ρ benda + ρ air ballas = 850.929 + 300
= 1150,929 kg/m3
4.4 Pengujian Pergerakan ROV
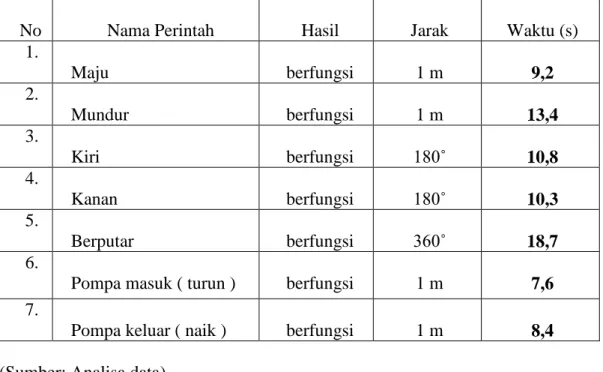
Tabel 13 Pengujian Pergerakan ROV
No Nama Perintah Hasil Jarak Waktu (s)
1. Maju berfungsi 1 m 9,2 2. Mundur berfungsi 1 m 13,4 3. Kiri berfungsi 180˚ 10,8 4. Kanan berfungsi 180˚ 10,3 5. Berputar berfungsi 360˚ 18,7 6.
Pompa masuk ( turun ) berfungsi 1 m 7,6
7.
Pompa keluar ( naik ) berfungsi 1 m 8,4
(Sumber: Analisa data)
Tabel 14 Pengujian Pergerakan maju ROV
No JARAK (m) Perhitungan (s) Uji Coba (s) Eror (%) 1 0.5 5 5.6 0.280 2 1 10 9.2 0.920 3 1.5 15 12.8 1.920 4 2 20 16.24 3.248 5 2.5 25 20.33 5.083
(Sumber: Analisa data)
Dari penyajian gambar dan tabel di atas pada tabel V.13 Menunjukan perbedaan nilai pengujian pergerakan ROV dari perhitungan dan percobaan. Adapun kesimpulanya sebagai berikut : pada percobaan mempunyai kecepatan waktu pergerakan yg lebih cepat dari pada perhitungan
5. Kesimpulan
1. Untuk dapat menghambat air masuk ke dalam rangka robot tiap lapisan kerangka robot harus diberi lapisan karet, lilin dan resin, hal ini dilakukan untuk mencegah masuknya air dan merusak rangkaian yang ada didalamnya dan diperlukan isolasi dari sistem elektro. 2. ROV yang dirancang terdiri dari 3 Dof (Degree of Freedom) yaitu 2 gerak translasi (mini
ROV bergerak maju/mundur searah sumbu x dan bergerak ke atas/bawah searah sumbu z) serta 1 gerak rotasi (mini ROV berputar/berotasi terhadap sumbu z). dan pada sistem pergerakan ROV mengunakan 2 daun baling-baling untuk maju dan mundur serta untuk menenggelamkan atau menaikan ROV menggunakan sistem pompaballast.
3. Keseimbangan body ROV sangat mempengaruhi kemampuan menyelam dan gerakan saat
bermanuver dan Untuk dapat menghambat air masuk ke dalam rangka robot tiap lapisan
kerangka robot harus diberi lapisan karet, lilin dan resin, hal ini dilakukan untuk mencegah masuknya air dan merusak rangkaian yang ada didalamnya dan diperlukan isolasi dari sistem elektro.
Keberlanjutan
Penelitian selanjutnya dilakukan pada perairan yang bergelombang.
Daftar Pustaka
Adriansyah, Andi. 2008. Perancangan Pergerakan Robot Bawah Air. Seminar Nasional
Informatika. Yogyakarta, tanggal 24 Mei 2008. Universitas Mercu Buana.
Aidi Electric. Co., LTD. 2004. 750GPH-01 Bilge Pump - Instructions. July 05, 2015. http://www.seaflo.com/upload/201404181137328261.pdf
Anonimous. 2013. Hukum Bernoulli. Http://Fisika/hukum bernoulli.
Associate Professor Gerald Seet. (2007) : Underwater Imaging. URV and applications.
Multi-robot coordination. Nanyang Technology University.
Atmel. 2011. 8-bit Microcontroller with 32K Bytes In-System Programmable Flash ATmega32A. http://www.atmel.com/dyn/…/doc8155.pdf
Borg, W.R. & Gall, M.D. Gall. (1989). Educational Research: An Introduction,Fifth Edition. New York: Longman.
Christ, Robert D., dan Wernli SR, Robert L. 2009. Observation Class ROVs Come of Age. Sixth
Christ, Robert D., dan Wernli SR, Robert L. 2007. The ROV Manual: A User Guide for
Observation-Class Remotely Operated Vehicles. India: Elsevier Ltd.
Delta Electronic. 2007. Merancang Robot Penjejak Garis dengan Menggunakan Delta Robo Kits dan DST-R8C STAMP.
Dugdale, R. H.. 1986. Mekanika Fluida. Edisi Ketiga. Erlangga, Jakarta EVS-380. 2007. Autonomous and Remotely Operated Vehicles.
http://www.uncwil.edu/nurc/evs380/2007/AUV_ROV_Factsheet.pdf
G. Dudek, P. Giguere, and J. Sattar, (2006) : Sensor-Based Behavior Control for an
Autonomous Underwater Vehicle. Experimental Robotics, Springer-Verlag,.
Germanischer Lloyd (GL),2009, Unmanned Submersibles (ROV, AUV) and Underwater Working Machines, Chapter 3 ,Page (2–1),2009.
Hoong, C. Y. 2010. Development of A Computer Controlled Remotely Operated Underwater Vehicle. Universiti Teknologi Malaysia. Kuala Lumpur
Hughes, Austin, 1990.”Electric Motors and Drives” .225 Wyman Street,Waltham,USA Hyakudome, Tadahiro. 2011. Design of Autonomous Underwater Vehicle. International
Journal of Advanced Robotic Systems. Vol. 8 No. 1. Hlm. 131-139.
Lirman, D., N. R. Gracias, B. E. Gintert,·A. C. R. Gleason,·R. P. Reid, S. Negahdaripour, dan P. Kramer. 2006. Development and Application of a Video-Mosaic Survey
Technology to Document The Status of Coral Reef Communities. http://137.52.224.90/ocean/cpce/lirman_2006.pdf
Munson., B.R. dan D.F. Young . 2004. Mekanika Fluida. Jilid I. Edisi Keempat. Penerbit Erlangga, Jakarta.
NOAA. 2010. Remotely Operated Vehicles (ROV).
Norsok Standard. 2003. Remotely Operated Vehicle (ROV) Services. Diunduh dari http://www.standard.no/PageFiles/978/U-102r1.pdf
Richey, Rita C. Klein. (2007). Design and Development Research. London:Lawrence Erlbaum Associates. Inc.
Robinson, H. and Keary, A. (2000) : Remote Control of Unmanned Undersea Vehicle. International UnmannedUndersea Vehicle Symposium.
Streeter, V.L. and E.B. Wylie. 1985. Fluid Mechanics. Eight Edition. Mc Graw Hill Book Company, USA.