i
PENYELESAIAN NUMERIS MODEL KONTINU
ARUS LALU LINTAS
Skripsi
Diajukan untuk Memenuhi Salah Satu Syarat Memperoleh Gelar Sarjana Sains
Program Studi Matematika
Oleh :
Bernadetta Ambar Sulistiyawati NIM: 133114011
PROGRAM STUDI MATEMATIKA, JURUSAN MATEMATIKA FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA YOGYAKARTA
ii
NUMERICAL SOLUTION TO A CONTINUOUS MODEL OF
TRAFFIC FLOWS
Thesis
Presented as a Partial Fulfillment of the Requirements to Obtain the Degree of Sarjana Sains
in Mathematics
By :
Bernadetta Ambar Sulistiyawati Student Number: 133114011
MATHEMATICS STUDY PROGRAM, DEPARTMENT OF MATHEMATICS FACULTY OF SCIENCE AND TECHNOLOGY
SANATA DHARMA UNIVERSITY YOGYAKARTA
SKRIPSI
PEi\YELESAIAI\
I\{UMERISMODEL KOI\TINU
ARUSLALU LII\TAS
Oleh:
Bernadetta Ambar Sulistiyawati NIM: 133i14011
Telah disetujui oleh:
Pembimbing
rfux/-4.,
Sudi Mungkasi, S.Si., M.Math.Sc.,
Ph.D.
Tanggal 2l Februari 2017SKRIPSI
PEI\YELESAIAN
NUMERIS
UNTUK MODEL KONTINU
ARUS
LALU LINTAS
Dipersiapkan dan ditulis oleh: Bernadetta Ambar Sulistiyawati
NIM: 13311401I
Telah dipertahankan di depan Panitia Penguji
Pada tanggal 28 Februari 2017
dan dinyatakan telah memenuhi symat
Ketua
Susunan Panitia Penguji Nama Lengkap
Hartono, S.Si., M.Sc., Ph.D. Sekretaris Febi Sanjay4 M.Sc.
Anggota
Sudi Mungkasi, S.Si., M.Math.Sc., Ph.D....4W..
da-fu&",
Yogyakart4 28 Februari 2017 Fakultas Sains dan Teknologi
Tanda Tangan i' - ti,!\.r i:,;',:.'-: :;'-.
**"
inl
nbf*,
rtr
&t..-
';
iil!
fJ;
5\ lbL"YrWtffi$L/-,
a't) i.,PERNYATAAN KEASLIAN KARYA
Saya menyatakan dengan sesungguhnya bahwa skripsi yang saya tulis ini
tidak memuatkarya atau bagian orang lain, kecuali yang telah disebutkan dalam kutipan atau daftar pustaka, sebagaimana layaknya karya ilmiah.
Yogyakarta, 28 Februai 2Al7
vi
MOTTO
“
Segala perkara dapat kutanggung didalam Dia yang memberi kekuatan
kepadaku” (Filipi 4:13)
“Visi tanpa tindakan hanyalah sebuah mimpi. Tindakan tanpa visi
hanyalah membuang waktu. Visi dengan tindakan akan mengubah
dunia!” (Joel Arthur Barker)
“Sesuatu mungkin mendatangi mereka yang mau menunggu, namun
hanya didapatkan oleh mereka yang bersemangat mengejarnya”
vii
HALAMAN PERSEMBAHAN
Karya ini kupersembahkan untuk:
Tuhan Yesus Kristus dan Bunda Maria yang senantiasa
menyertaiku
viii
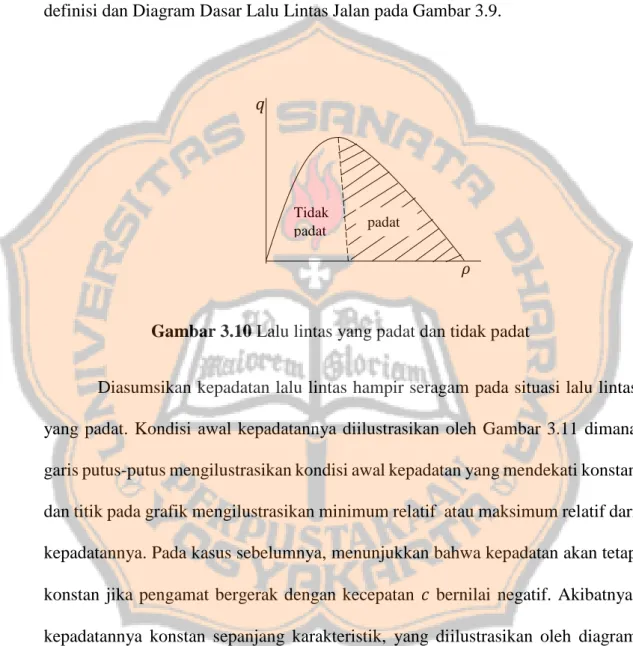
ABSTRAK
Arus lalu lintas dimodelkan dan diteliti dalam skripsi ini. Kemacetan menjadi masalah lalu lintas yang sering terjadi di kota. Oleh karena itu, penulis membahas model matematika yang berhubungan dengan arus lalu lintas. Pembahasan mencakup bagaimana kondisi kepadatan lalu lintas yang dilihat dari pergerakan kendaraan secara makro, bukan pegerakan setiap kendaraan.
Model matematika masalah arus lalu lintas berbentuk persamaan diferensial parsial yang dapat ditulis dalam bentuk hukum konservasi. Model tersebut diselesaikan dengan menggunakan teori linearisasi persamaan diferensial untuk mencari solusi analitisnya. Selain itu, penulis akan menggunakan metode volume hingga Lax-Friedrichs dan sistem relaksasi Jin-Xin untuk menyelesaikan model tersebut secara numeris
Solusi analitis dan numeris akan disimulasikan dengan menggunakan perangkat lunak MATLAB. Penelitian ini akan menguji metode mana yang dapat digunakan untuk menyelesaikan masalah arus lalu lintas jika dibandingkan dengan solusi analitisnya. Analisis hasilnya dengan melihat simulasi yang dihasilkan dan seberapa besar erornya. Semakin kecil nilai erornya maka semakin baik metode numeris yang digunakan.
Kata kunci: arus lalu lintas, persamaan diferensial parsial, hukum kekekalan,
ix
ABSTRACT
A traffic flow is modeled and studied in this thesis. A traffic jam becomes the problem that often occurs in a city. Therefore, the author discusses about the mathematical models that is related to the traffic flow. It explores on traffic density conditions seen from the macro movement of the vehicles, not each vehicles.
Mathematical model of traffic flow problem is in the form of partial differential equations that could be written in the form of conservation laws. The model is solved using linearization theory of differential equations to find analytical solutions. In addition, the author uses Lax-Friedrichs finite volume method and Jin-Xin relaxation system to solve the model numerically.
Analytical and numerical solutions to the model are simulated using MATLAB software. This study examines the methods which could be used to solve the traffic flow problem if it is compared with the analytical solution as the previous solution. The results are analyzed by viewing the simulation outcomes along with the errors. The smaller the errors, the better the numerical method that is used.
Keywords: traffic flow, partial differential equations, conservation laws, finite
x
KATA PENGANTAR
Puji dan syukur penulis panjatkan kepada Tuhan Yesus Kristus yang telah mencurahkan rahmat dan roh kudusNya sehingga penulis dapat mengerjakan dan menyelesaikan skripsi ini dengan baik. Skripsi ini dibuat dengan tujuan memenuhi syarat untuk memperoleh gelar Sarjana Sains pada Program Studi Matematika, Fakultas Sains dan Teknologi, Univesitas Sanata Dharma.
Penulis menyadari bahwa penulis melibatkan banyak pihak untuk membantu dalam menghadapi berbagai macam tantangan, kesulitan, dan hambatan. Oleh karena itu pada kesempatan ini penulis mengucapkan terima kasih kepada:
1. Bapak Sudi Mungkasi, S.Si., M.Math.Sc., Ph.D., selaku dekan Fakultas Sains dan Teknologi dan dosen pembimbing skripsi.
2. Bapak Hartono, S.Si., M.Sc., Ph.D., selaku Kaprodi Matematika.
3. Ibu M. V. Any Herawati, S.Si., M.Si., selaku Dosen Pembimbing Akademik.
4. Romo Prof. Dr. Frans Susilo, SJ., Bapak Ir. Ig. Aris Dwiatmoko, M.Sc., Bapak Dr. rer. nat. Herry P. Suryawan, S.Si., M.Si., dan Ibu Lusia Krismiyati Budiasih, S.Si., M.Si. selaku dosen-dosen Prodi Matematika yang telah memberikan banyak pengetahuan kepada penulis selama proses perkuliahan.
5. Bapak/Ibu dosen/karyawan Fakultas Sains dan Teknologi yang telah berdinamika bersama selama penulis berkuliah.
6. Kedua orang tua dan adik yang telah membantu dan mendukung saya selama proses pengerjaan skripsi.
7. Teman-teman Matematika 2013: Inge, Yui, Sorta, Melisa, Agung, Laras, Ezra, Yuni, Rey, Dion, Wahyu, Indra, Bintang, Tia, Lya, Andre, Sisca, Natali, Yola, Sari, Dita, dan Kristo yang selalu memotivasi, memberi masukan dan keceriaan, dan masih banyak yang tidak bisa disebutkan satu persatu. Terima kasih atas kebersamaan dan kekompakan ini.
8. Kakak-kakak, teman-teman dan adik-adik: Vincent, Kak Chandra, Kak Happy, Arka, Monic, Kak Lia, Tessa, Vania, Cicil, Kak Arum, Kak Yohan,
Kak Tika, Kak Kristin, dan yang lainnya, terimakasih untuk semangat dan
dukungannya selama penulis berkuliah dan menulis skripsi ini.
9.
Semua pihak yang tidak dapat disebutkan satu per satu dalam prosespenulisan skripsi ini.
Semoga segala perhatian, dukungan, bantuan dan cinta yang telah diberikan
mendapatkan balasan dari Tuhan Yesus Kristus. Penulis menyadari bahwa masih
banyak kekurangan dalam penulisan skripsi
ini.
Oleh karenaitu,
penulismengharapkan kritik dan saran demi penyempurnaan skripsi ini. Harapan penulis, semoga skripsi ini bermanfaat bagi pembaca dan menjadi referensi belajar yang baik.
Yogyakarta, 28 Februai 2017
Bernadetta Ambar Sulistiawati
LEMBAR PERNYATAAN PERSETUJUAN
PUBLIKASI KARYA ILMIAH TINTUK KEPENTINGAN AKADEMIS
Yang bertanda tangan di bawah ini, saya mahasiswa Universitas Sanata Dharma:
Nama
: Bernadetta Ambar Sulistiyawati Nomor Mahasiswa : 133114011Demi pengembangan ilmu pengetahuan, saya memberikan kepada Perpustakaan
Universitas Sanata Dharma karya ilmiah saya yang berjudul:
PENYELESAIAN NUMERIS MODEL KONTINU ARUS LALU LINTAS
beserta perangkat yang diperlukan (bila ada). Dengan demikian saya memberikan
kepada Perpustakaan Universitas Sanata Dharma hak untuk menyimpan, mengalihkan dalam bentuk media lain, mengelolanya dalam bentuk pangkalan data,
mendistribusikan secara terbatas, dan mempublikasikannya di Intemet atau media
lain untuk kepentingan akademis tanpa perlu meminta izin dari saya maupun memberikan royalti kepada saya selama tetap mencatumkan nama saya sebagai
penulis.
Demikian pernyataan ini saya buat dengan sebenamya.
Dibuat di Yogyakarta
Pada tanggal: 28 Februari2017
Yang menyatakan
cM
(Bemadetta Ambar Sulistiyawati)
xiii
DAFTAR ISI
HALAMAN JUDUL ... i
HALAMAN PERSETUJUAN PEMBIMBING... iii
HALAMAN PENGESAHAN ... iv
HALAMAN KEASLIAN KARYA ... v
MOTTO ... vi
HALAMAN PERSEMBAHAN ... vii
ABSTRAK ... viii
ABSTRACT ... ix
KATA PENGANTAR ... x
LEMBAR PERNYATAAN PERSETUJUAN PUBLIKASI ... xii
DAFTAR ISI ... xiii
BAB I PENDAHULUAN ... 1 A. Latar Belakang ... 1 B. Rumusan Masalah ... 4 D. Tujuan Penulisan ... 5 E. Manfaat penulisan ... 5 F. Metode Penulisan ... 5 G. Sistematika Penulisan ... 6
BAB IIPERSAMAAN DIFERENSIAL... 8
A. Turunan ... 8
B. Integral ... 12
C. Penurunan Numeris ... 15
D. Klasifikasi Persamaan Diferensial ... 17
xiv
F. Metode Volume Hingga ... 21
G. Metode Garis ... 23
H. Matriks Jacobian ... 24
I. Nilai Eigen dan Vektor Eigen ... 25
BAB III PENYELESAIAN MODEL ARUS LALU LINTAS ... 28
A. Hubungan Kecepatan, Kepadatan, dan Arus Lalu Lintas... 28
B. Model Deterministik Arus Lalu Lintas ... 30
C. Linearisasi Model Lalu Lintas ... 38
D. Gelombang Kepadatan Lalu Lintas ... 49
E. Interpretasi Gelombang Lalu Lintas ... 53
F. Contoh Arus Lalu Lintas yang Hampir Seragam ... 54
G. Metode Karakteristik Lalu Lintas Tidak Seragam ... 58
H. Lalu Lintas dari Lampu Merah ke Hijau ... 64
I. Hubungan Linear Antara Kecepatan dan Kepadatan ... 74
J. Nilai Kepadatan Awal Tidak Konstan ... 79
K. Solusi Analitis ... 85
BAB IVSIMULASI NUMERIS ARUS LALU LINTAS ... 89
A. Metode Volume Hingga Lax–Friedrichs ... 89
B. Sistem Relaksasi Jin–Xin ... 93
C. Eror Solusi Numeris ... 99
D. Simulasi Solusi Analitis dan Numeris ... 100
BAB VKESIMPULAN DAN SARAN ... 106
A. Kesimpulan ... 106
B. Saran ... 106
DAFTAR PUSTAKA ... 107
1
BAB I PENDAHULUAN
Dalam bab ini akan dibahas tentang latar belakang, rumusan masalah,
batasan masalah, tujuan penulisan, manfaat penulisan, metode penulisan, dan
sistematika penulisan skripsi ini.
A. Latar Belakang
Dalam kehidupan sehari–hari, kita sering menjumpai suatu model
matematika yang berbentuk persamaan, baik linear ataupun nonlinear, serta sistem
persamaan linear maupun nonlinear yang memuat diferensial, integral, dan
persamaan diferensial biasa ataupun persamaan diferensial parsial. Model
matematika tersebut dapat diselesaikan dengan dua cara, yaitu penyelesaian analitis
dan penyelesaian bukan analitis. Penyelesaian analitis adalah penyelesaian model
matematika dengan menggunakan teori atau metode analisis matematika yang telah
ada sedemikian sehingga hasil yang diperoleh merupakan penyelesaian eksak.
Penyelesaian bukan analitis adalah penyelesaian model matematika dengan metode
pendekatan diskret sehingga penyelesaian yang diperoleh merupakan penyelesaian
pendekatan, dan bukan penyelesaian eksak. Penyelesaian pendekatan diskret itu
disebut penyelesaian numeris.
Penyelesaian numeris adalah penyelesaian yang dicari dengan
menggunakan metode numeris. Metode numeris merupakan salah satu bagian dari
2010). Perkembangan komputer digital yang pesat menyebabkan metode numeris
banyak digunakan untuk menyelesaikan masalah nyata, yang penyelesaian
eksaknya sangat sulit diperoleh, khususnya model matematika dalam bentuk
persamaan diferensial.
Persamaan diferensial adalah suatu persamaan yang melibatkan turunan dari
satu atau lebih variabel terikat yang berhubungan dengan satu atau lebih variabel
bebas. Ada dua jenis persamaan diferensial berdasarkan banyaknya variabel bebas,
yaitu persamaan diferensial biasa yang hanya melibatkan turunan biasa dan
persamaan diferensial parsial yang melibatkan turunan parsial. Ada dua jenis
persamaan diferensial parsial, yaitu persamaan diferensial parsial linear dan
nonlinear. Beberapa contoh model dari persamaan diferensial parsial adalah model
arus lalu lintas di jalan yang ramai, aliran darah yang melalui dinding tabung elastis,
dan gelombang kejut sebagai kasus khusus dari teori umum dinamika gas dan
hidrolika (Wazwaz, 2009). Dalam skripsi ini akan dibahas mengenai persamaan
diferensial parsial untuk model kontinu arus lalu lintas.
Undang – Undang No. 22 Tahun 2009 mengatur tentang Lalu Lintas dan
Angkutan Jalan. Lalu lintas adalah gerak kendaraan dan orang di ruang lalu lintas
jalan, sedangkan rambu lalu lintas adalah bagian perlengkapan jalan yang berupa
lambang, huruf, angka, kalimat dan/atau panduan yang berfungsi sebagai
peringatan, larangan, perintah, atau petunjuk bagi pengguna jalan. Lampu lalu lintas
adalah lampu yang mengendalikan arus lalu lintas bagi pengguna jalan raya di
persimpangan jalan, tempat penyeberangan bagi pejalan kaki, dan tempat lalu lintas
memperlancar aliran lalu lintas. Walaupun demikian, tidak bisa dijamin bahwa
kemacetan dapat teratasi dengan adanya lampu lalu lintas. Masalah transportasi
yang paling sering terjadi beberapa tahun terakhir ini adalah kemacetan lalu lintas.
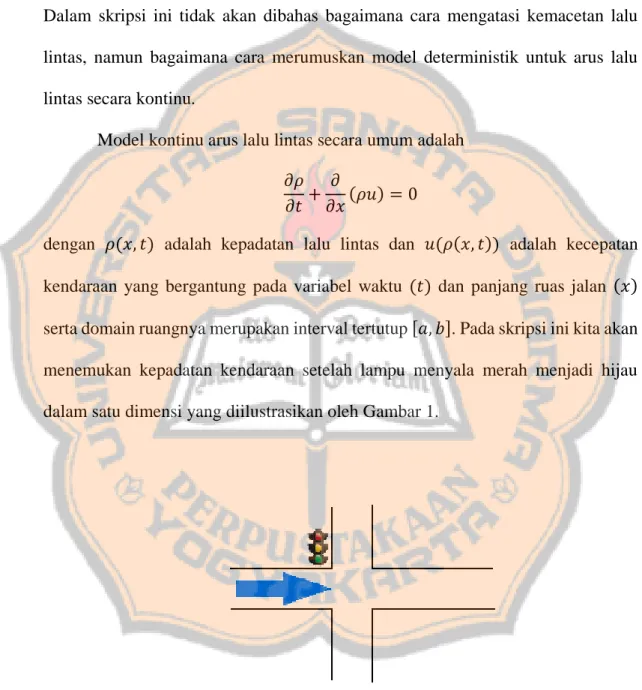
Dalam skripsi ini tidak akan dibahas bagaimana cara mengatasi kemacetan lalu
lintas, namun bagaimana cara merumuskan model deterministik untuk arus lalu
lintas secara kontinu.
Model kontinu arus lalu lintas secara umum adalah 𝜕𝜌
𝜕𝑡 + 𝜕
𝜕𝑥(𝜌𝑢) = 0
dengan 𝜌(𝑥, 𝑡) adalah kepadatan lalu lintas dan 𝑢(𝜌(𝑥, 𝑡)) adalah kecepatan kendaraan yang bergantung pada variabel waktu (𝑡) dan panjang ruas jalan (𝑥) serta domain ruangnya merupakan interval tertutup [𝑎, 𝑏]. Pada skripsi ini kita akan menemukan kepadatan kendaraan setelah lampu menyala merah menjadi hijau
dalam satu dimensi yang diilustrasikan oleh Gambar 1.
Gambar 1 Ilustrasi masalah lalu lintas pada perempatan jalan.
Persamaan di atas disebut persamaan diferensial parsial yang berhubungan dengan
jalan. Kecepatan kendaraan adalah jarak yang ditempuh kendaraan setiap satuan
waktu.
Penyelesaian persamaan diferensial parsial tersebut memiliki dua
komponen penting yang tidak diketahui, yaitu kepadatan lalu lintas dan kecepatan kendaraan. Secara umum, penyelesaian model kontinu arus lalu lintas tersebut cukup sulit diselesaikan secara analitis, sehingga diperlukan penyelesaian numeris
untuk memecahkannya. Banyak metode numeris yang dapat digunakan untuk
memecahkannya, antara lain metode volume hingga Lax-Friedrichs dan sistem
relaksasi Jin-Xin. Pada skripsi ini akan dibandingkan antara metode volume hingga
Lax-Friedrichs dan sistem relaksasi Jin-Xin untuk melihat metode mana yang
paling baik dengan eror sekecil mungkin. Referensi utama tentang masalah arus
lalu lintas dalam skripsi ini adalah Haberman (1998). Sedangkan untuk metode
volume hingga Lax-Friedrichs merujuk pada LeVeque (1992, 2002) dan sistem
relaksasi Jin-Xin merujuk pada Yohana (2012).
B. Rumusan Masalah
Perumusan masalah yang akan dibicarakan pada tugas akhir ini adalah:
1. Bagaimana memodelkan secara kontinu arus lalu lintas dalam bentuk persamaan
diferensial parsial?
2. Bagaimana menyelesaikan model kontinu arus lalu lintas secara numeris?
3. Bagaimana perbandingan tingkat eror antara metode volume hingga
Pembahasan masalah dalam skripsi ini dibatasi pada penyelesaian
persamaan diferensial parsial untuk model kontinu arus lalu lintas yang pergerakan
kendaraannya hanya satu arah pada ruas jalan, dengan asumsi kendaraan tidak
saling mendahului.
D. Tujuan Penulisan
Tujuan dari penulisan skripsi ini, yaitu
1. Memodelkan dan menyelesaikan persamaan arus lintas yang kontinu.
2. Membandingkan eror antara metode volume hingga Lax-Friedrichs dan sistem
relaksasi Jin-Xin, jika diterapkan pada model kontinu arus lalu lintas.
E. Manfaat penulisan
Dengan memodelkan persamaan arus lalu lintas secara kontinu, kita dapat
menyimulasikan pergerakan kendaraan satu arah pada ruas jalan yang bergantung
pada waktu dan panjang ruas jalan.
F. Metode Penulisan
Metode yang digunakan penulis dalam penulisan skripsi ini adalah metode
studi pustaka, yaitu dengan membaca dan mempelajari buku-buku atau
jurnal-jurnal yang berkaitan dengan persamaan diferensial parsial untuk model kontinu
G. Sistematika Penulisan BAB I PENDAHULUAN A. Latar Belakang B. Rumusan Masalah C. Batasan Masalah D. Tujuan Penulisan E. Manfaat Penulisan F. Metode Penulisan G. Sistematika Penulisan
BAB II PERSAMAAN DIFERENSIAL
A. Turunan
B. Integral
C. Penurunan Numeris
D. Klasifikasi Persamaan Diferensial
E. Metode Karakteristik
F. Metode Volume Hingga
G. Metode Garis
H. Matriks Jacobian
I. Nilai Eigen dan Vektor Eigen
BAB III PENYELESAIAN NUMERIS ARUS LALU LINTAS
A. Hubungan Kecepatan, Kepadatan, dan Arus Lalu Lintas
B. Model Deterministik Arus Lalu Lintas
E. Interpretasi Gelombang Lalu Lintas
F. Contoh Arus Lalu Lintas yang Hampir Seragam
G. Metode Karakteristik Lalu Lintas Tidak Seragam
H. Lalu Lintas dari Lampu Merah ke Hijau
I. Hubungan Linear antara Kecepatan dan Kepadatan
J. Nilai Kepadatan Awal Tidak Konstan
K. Solusi Analitis
BAB IV SIMULASI NUMERIS ARUS LALU LINTAS
A. Metode Volume Hingga Lax-Friedrichs
B. Sistem Relaksasi Jin-Xin
C. Eror Solusi Numeris
D. Simulasi Solusi Analitis dan Numeris
BAB V PENUTUP
A. Kesimpulan
B. Saran
DAFTAR PUSTAKA
8
BAB II
PERSAMAAN DIFERENSIAL
Pada bab ini akan dipaparkan landasan teori yang digunakan dalam skripsi
ini, yaitu turunan, integral, penurunan numeris, klasifikasi persamaan diferensial,
metode karakteristik, metode garis, matriks Jacobian, dan nilai eigen serta vektor
eigen.
A. Turunan
Dalam subbab ini akan dijelaskan definisi dan contoh dari turunan, hubungan
turunan dan fungsi kontinu, serta aturan Leibniz.
Definsi 2.1.1
Diberikan fungsi 𝑓: 𝐷𝑓⊆ ℝ → ℝ dan 𝑎 ∈ 𝐷𝑓.
Turunan / derivatif dari fungsi 𝑓 di titik 𝑎 didefinisikan sebagai 𝑓′(𝑎) = lim
ℎ→0
𝑓(𝑎 + ℎ) − 𝑓(𝑎) ℎ
dengan syarat bahwa nilai limit tersebut ada.
Definisi 2.1.2
Definisi lain untuk turunan, jika diambil subtitusi 𝑥 = 𝑎 + ℎ dan ℎ = 𝑥 − 𝑎 maka ℎ → 0 jika dan hanya jika 𝑥 → 𝑎, sehingga
𝑓′(𝑎) = lim 𝑥→𝑎
𝑓(𝑥) − 𝑓(𝑎) 𝑥 − 𝑎
Jika nilai 𝑓′(𝑎) ada, maka fungsi 𝑓 dikatakan mempunyai turunan atau derivatif di titik 𝑎.
Contoh 2.1.1
Tentukan turunan fungsi 𝑓(𝑥) = 𝑥2− 3𝑥 di 𝑥 = 2. Penyelesaian: 𝑓′(2) = lim ℎ→0 𝑓(2 + ℎ) − 𝑓(2) ℎ = lim ℎ→0 (2 + ℎ)2− 3(2 + ℎ) − (22− 3 ∙ 2) ℎ = lim ℎ→0 4 + 4ℎ + ℎ2− 6 − 3ℎ + 2 ℎ = lim ℎ→0 ℎ2+ ℎ ℎ = lim ℎ→0ℎ + 1 = 1. Definisi 2.1.3
Diberikan fungsi 𝑓: 𝐷𝑓 ⊆ ℝ → ℝ , maka turunan atau derivatif dari fungsi 𝑓 untuk setiap titik 𝑥 ∈ 𝐷𝑓 adalah
𝑓′(𝑥) = lim ℎ→0 𝑓(𝑥 + ℎ) − 𝑓(𝑥) ℎ atau 𝑓′(𝑥) = lim 𝑦→𝑥 𝑓(𝑦) − 𝑓(𝑥) 𝑦 − 𝑥 dengan syarat bahwa nilai limit tersebut ada.
Contoh 2.1.2
Tentukan turunan fungsi 𝑓′(𝑥) jika diketahui 𝑓(𝑥) = 𝑥3. Penyelesaian:
𝑓′(𝑥) = lim ℎ→0
𝑓(𝑥 + ℎ) − 𝑓(𝑥) ℎ
= lim ℎ→0 (𝑥 + ℎ)3− 𝑥3 ℎ = lim ℎ→0 𝑥3 + 3𝑥2ℎ + 3𝑥ℎ2+ ℎ3− 𝑥3 ℎ = lim ℎ→0 3𝑥2ℎ + 3𝑥ℎ2+ ℎ3 ℎ = lim ℎ→03𝑥 2 + 3𝑥ℎ + ℎ2 = 3𝑥2. Contoh 2.1.3
Tentukan turunan pertama fungsi 𝑓(𝑥) =𝑥+1𝑥+2. Penyelesaian: 𝑓′(𝑥) = lim 𝑦→𝑥 𝑓(𝑦) − 𝑓(𝑥) 𝑦 − 𝑥 = lim 𝑦→𝑥 𝑦 + 1 𝑦 + 2 −𝑥 + 1𝑥 + 2 𝑦 − 𝑥 = lim 𝑦→𝑥 (𝑦 + 1)(𝑥 + 2) − (𝑥 + 1)(𝑦 + 2) (𝑥 + 2)(𝑦 + 2) 𝑦 − 𝑥 = lim 𝑦→𝑥 𝑥𝑦 + 2𝑦 + 𝑥 + 2 − 𝑥𝑦 − 2𝑥 − 𝑦 − 2 (𝑥 + 2)(𝑦 + 2) 𝑦 − 𝑥 = lim 𝑦→𝑥 𝑦 − 𝑥 (𝑥 + 2)(𝑦 + 2) 𝑦 − 𝑥 = lim 𝑦→𝑥 1 (𝑥 + 2)(𝑦 + 2) = 1 (𝑥 + 2)2 .
Teorema 2.1.1
Jika 𝑓(𝑥) mempunyai turunan atau terdiferensial di 𝑥 = 𝑎, maka 𝑓(𝑥) kontinu di 𝑥 = 𝑎.
Bukti dapat dilihat pada buku karangan Hallet. H, Gleason, McCallum, dkk yang
berjudul Calculus (Single and Multi Variable).
Teorema 2.1.2
Jika 𝑓 dan 𝑔 kedua fungsi yang mempunyai turunan, maka fungsi komposisi 𝑓 ∘ 𝑔 juga mempunyai turunan yaitu
(𝑓 ∘ 𝑔)′(𝑥) = 𝑓′(𝑔(𝑥))𝑔′(𝑥)
dengan menggunakan notasi Leibniz, rumus di atas dapat dibagi menjadi dua kasus
yaitu:
Kasus 1. Jika 𝑦 = 𝑓(𝑢) fungsi terhadap 𝑢 dan 𝑢 = 𝑔(𝑥) fungsi terhadap 𝑥 yang
keduanya terdiferensial, maka 𝑑𝑦 𝑑𝑥= 𝑑𝑦 𝑑𝑢∙ 𝑑𝑢 𝑑𝑥.
Kasus 2. Jika 𝑧 = 𝑓(𝑥, 𝑦) fungsi terhadap 𝑥 dan 𝑦 yang terdiferensial dengan 𝑥 =
𝑔(𝑡) dan 𝑦 = ℎ(𝑡) fungsi terhadap 𝑡 yang juga terdiferensial maka 𝑑𝑧 𝑑𝑡 = 𝜕𝑧 𝜕𝑥∙ 𝑑𝑥 𝑑𝑡 + 𝜕𝑧 𝜕𝑦∙ 𝑑𝑦 𝑑𝑡.
Bukti dapat dilihat pada buku karangan Hallet. H, Gleason, McCallum, dkk yang
berjudul Calculus (Single and Multi Variable).
Contoh 2.1.1
Tentukan turunan (𝑑𝑦𝑑𝑥) jika diketahui 𝑦 = 𝑢2 + 3𝑢 dan 𝑢 = 3𝑥2 + 5𝑥 − 1. Penyelesaian:
Dipandang 𝑑𝑦 𝑑𝑥= 𝑑(𝑢2+ 3𝑢) 𝑑𝑢 ∙ 𝑑(3𝑥2+ 5𝑥 − 1) 𝑑𝑥 , 𝑑𝑦 𝑑𝑥 = (2𝑢 + 3) ∙ (6𝑥 + 5). Karena 𝑢 = 3𝑥2 + 5𝑥 − 1, maka didapat 𝑑𝑦
𝑑𝑥 = (2(3𝑥2+ 5𝑥 − 1) + 3) ∙ (6𝑥 + 5).
Contoh 2.1.2
Diketahui 𝑧 = 𝑥3+ 3𝑥𝑦, dengan 𝑥 = 5𝑡2 dan 𝑦 = 𝑡2 + 7𝑡. Tentukan 𝑑𝑧 𝑑𝑡. Penyelesaian: 𝑑𝑧 𝑑𝑡 = 𝜕(𝑥3+ 3𝑥𝑦) 𝜕𝑥 ∙ 𝑑(5𝑡2) 𝑑𝑡 + 𝜕(𝑥3+ 3𝑥𝑦) 𝜕𝑦 ∙ 𝑑(𝑡2+ 7𝑡) 𝑑𝑡 , 𝑑𝑧 𝑑𝑡= (3𝑥2+ 3𝑦) ∙ 10𝑡 + 3𝑥 ∙ (2𝑡 + 7), 𝑑𝑧 𝑑𝑡= 30𝑥2𝑡 + 30𝑦𝑡 + 6𝑥𝑡 + 21𝑥. B. Integral
Dalam subbab ini akan dijelaskan definisi dan contoh dari integral tak tentu dan
integral tertentu.
Definisi 2.2.1
Integral suatu fungsi dapat didefinisikan sebagai invers/anti turunan fungsi yang dinotasikan oleh ∫ 𝑓(𝑥) 𝑑𝑥 = 𝐹(𝑥), yang artinya integral fungsi 𝑓(𝑥) terhadap 𝑥.
Contoh 2.2.1
Tentukan integral dari fungsi 𝑓(𝑥) = 2𝑥. Penyelesaian:
∫ 2𝑥 𝑑𝑥 = 𝑥2+ 𝑐, 𝑐 ∈ ℝ.
Definsi 2.2.2
Misalkan 𝑔 adalah fungsi bernilai real yang terdefinisi pada interval [𝑎, 𝑏] dan {𝑥0, 𝑥1, 𝑥2, … , 𝑥𝑛−1, 𝑥𝑛} dengan 𝑎 = 𝑥0 < 𝑥1 < 𝑥2 < ⋯ < 𝑥𝑛−1 = 𝑏 yang merupakan partisi pada [𝑎, 𝑏], 𝑓 dikatakan terintegral Riemann pada interval [𝑎, 𝑏] jika limit berikut ada
∫ 𝑓(𝑥) 𝑏 𝑎 𝑑𝑥 = lim ‖∆𝑥‖→0∑ 𝑓(𝑥𝑗 ∗)(𝑥 𝑗− 𝑥𝑗−1) 𝑛 𝑗=1
dengan ‖∆𝑥‖ = max1≤𝑗≤𝑛(𝑥𝑗 − 𝑥𝑗−1) dan 𝑥𝑗∗ ∈ [𝑥𝑗−1, 𝑥𝑗] disebut titik evaluasi (𝑡𝑎𝑔).
Jumlahan Riemann didefinisikan sebagai
∑ 𝑓(𝑥𝑗∗)(𝑥 𝑗− 𝑥𝑗−1) 𝑛 𝑗=1 . Definisi 2.2.3
Jika 𝑓 merupakan fungsi kontinu pada interval tertutup [𝑎, 𝑏], kita dapat membagi interval tertutup [𝑎, 𝑏] menjadi 𝑛 sub interval yang lebarnya sama yaitu ∆𝑥𝑖 = (𝑏 − 𝑎) 𝑛⁄ dengan 𝑖 = 1,2,3 … , 𝑛. Diambil 𝑥0(= 𝑎), 𝑥1, 𝑥2, … , 𝑥𝑛(= 𝑏) menjadi titik sampel dari subinterval dan 𝑥1∗, 𝑥2∗, … , 𝑥𝑛∗ sembarang titik sampel dari subinterval sehingga 𝑥𝑖∗ yang terletak pada subinterval ke-𝑖 [𝑥
𝑖−1, 𝑥𝑖]. Maka integral tertentu dari fungsi 𝑓 pada interval tertutup [𝑎, 𝑏] didefinisikan sebagai
∫ 𝑓(𝑥)𝑑𝑥𝑏 𝑎 = lim 𝑛→∞∑ 𝑓(𝑥𝑖 ∗)∆𝑥 𝑖 𝑛 𝑖=1 .
Contoh 2.2.2
Tentukan integral fungsi 𝑓(𝑥) = 2𝑥 − 3 pada interval tertutup [0,3] dengan menggunakan definisi.
Penyelesaian:
Bagi interval [0,3] kedalam 𝑛 subinterval yang sama panjang dengan ∆𝑥𝑖 = 𝑏 − 𝑎
𝑛 =
3 𝑛. Ambil titik sampel 𝑥𝑖∗ = 𝑎 + ∆𝑥
𝑖𝑖 = 0 +𝑛3𝑖 =3𝑖𝑛. Jadi, 𝑓(𝑥𝑖∗) = 𝑓(𝑥
𝑖) = 2 (3𝑖𝑛) − 1 =6𝑖𝑛 − 1. Kemudian, jumlahan Riemman didapat
∑ 𝑓(𝑥𝑖∗)∆𝑥𝑖 𝑛 𝑖=1 = ∑ (6𝑖 𝑛 − 1) 3 𝑛 𝑛 𝑖=1 = 3 𝑛∑ ( 6𝑖 𝑛 − 1) 𝑛 𝑖=1 = 3 𝑛(∑ 6𝑖 𝑛 𝑛 𝑖=1 − ∑ 1 𝑛 𝑖=1 ) = 3 𝑛( 6 𝑛∑ 𝑖 𝑛 𝑖=1 − ∑ 1 𝑛 𝑖=1 ) = 3 𝑛( 6 𝑛 1 2𝑛(𝑛 + 1) − 𝑛) = 9(𝑛 + 1) 𝑛 − 3 = 6 + 9 𝑛. Jadi, ∫ (2𝑥 + 1)𝑑𝑥3 0 = lim 𝑛→∞(6 + 9 𝑛) = 6.
C. Penurunan Numeris
Dalam subbab ini akan dijelaskan definisi deret Taylor dan hampiran metode
numeris.
Teorema 3.3.1
Misalkan 𝑓 fungsi kontinu dan terdiferensial takhingga kali. Fungsi 𝑓 dapat dideretkan secara Taylor di sekitar titik 𝑥 = 𝑐 dengan 𝑐 ∈ ℝ, yaitu
𝑓(𝑥) = 𝑓(𝑐) +𝑓 ′(𝑐) 1! (𝑥 − 𝑐) + 𝑓′(𝑐) 2! (𝑥 − 𝑐)2+ 𝑓′(𝑐) 3! (𝑥 − 𝑐)3+ ⋯. Kasus khusus untuk nilai 𝑐 = 0, deret Taylor disebut deret Maclaurin.
Bukti dapat dilihat pada buku karangan Dale Varberg, dkk yang berjudul Kalkulus
Edisi Kesembilan Jilid 2.
Teorema 3.3.2 (Teorema Taylor dengan suku sisa Lagrange)
Jika 𝑓, 𝑓′, 𝑓′′, … , 𝑓(𝑛) kontinu pada interval [𝑎, 𝑏] dan 𝑓(𝑛+1) kontinu pada interval (𝑎, 𝑏) maka untuk setiap 𝑥 dan 𝑐 dalam [𝑎, 𝑏] terdapat bilangan 𝜉 di antara 𝑥 dan 𝑐 sehingga berlaku 𝑓(𝑥) = ∑𝑓 𝑘(𝑐) 𝑘! (𝑥 − 𝑐)𝑘+ 𝐸𝑛 𝑛 𝑘=0 dengan 𝐸𝑛 =𝑓 (𝑛+1)(𝜉) (𝑛+1)! (𝑥 − 𝑐)𝑛+1.
Bukti dapat dilihat pada buku karangan Dale Varberg, dkk yang berjudul Kalkulus
Edisi Kesembilan Jilid 2.
Definisi 3.3.2
Dipandang fungsi 𝑦 = 𝑓(𝑥). Turunan fungsi 𝑦 terhadap variabel 𝑥 didefinisikan oleh
𝑓′(𝑥) = lim ∆𝑥→0
𝑓(𝑥 + ∆𝑥) − 𝑓(𝑥)
∆𝑥 .
Tidak semua fungsi dapat diturunkan secara langsung karena sering kali hanya
diketahui beberapa titik pada data awal, fungsi tidak diketahui secara eksplisit atau
fungsi mempunyai bentuk yang sangat rumit. Oleh karena itu, dalam perhitungan
turunan fungsi dapat diselesaikan dengan metode numeris yang hasilnya berupa
hampiran mendekati nilai turunan sebenarnya tetapi dengan eror yang sekecil
mungkin. Contoh-contoh di bawah ini merupakan fungsi yang sulit untuk
diturunkan secara langsung, antara lain
(1) 𝑓(𝑥) = cos 𝑥+𝑒
−𝑥− 3𝑥 sin 𝑥 √sin(4𝑥3)+𝑥2tan(5𝑥)
(2) 𝑓(𝑥) = 𝑥2ln(8𝑥3)𝑒(5𝑥2+3𝑥+2) Tiga hampiran metode numeris yaitu
1. Hampiran beda maju
Dipandang fungsi 𝑓 = 𝑓(𝑥). Turunan 𝑦 terhadap variabel 𝑥 didefinisikan oleh
𝑓′(𝑥) = lim ∆𝑥→0
𝑓(𝑥 + ∆𝑥) − 𝑓(𝑥)
∆𝑥 ,
atau untuk ∆𝑥 tertentu menjadi
𝑓′(𝑥) ≈𝑓(𝑥 + ∆𝑥) − 𝑓(𝑥)
∆𝑥 .
2. Hampiran beda mundur
Dipandang fungsi 𝑓 = 𝑓(𝑥). Turunan 𝑦 terhadap variabel 𝑥 didefinisikan oleh
𝑓′(𝑥) = lim ∆𝑥→0
𝑓(𝑥) − 𝑓(𝑥 − ∆𝑥)
atau untuk ∆𝑥 tertentu menjadi
𝑓′(𝑥) ≈𝑓(𝑥) − 𝑓(𝑥 − ∆𝑥)
∆𝑥 .
3. Hampiran beda pusat
Dipandang fungsi 𝑓 = 𝑓(𝑥). Turunan 𝑦 terhadap variabel 𝑥 didefinisikan oleh
𝑓′(𝑥) = lim ∆𝑥→0
𝑓(𝑥 + ∆𝑥) − 𝑓(𝑥 − ∆𝑥)
2∆𝑥 ,
atau untuk ∆𝑥 tertentu menjadi
𝑓′(𝑥) ≈𝑓(𝑥 + ∆𝑥) − 𝑓(𝑥 − ∆𝑥)
2∆𝑥 .
D. Klasifikasi Persamaan Diferensial
Dalam subbab ini akan dijelaskan definisi dan contoh dari persamaan diferensial,
persamaan diferensial biasa, dan persamaan diferensial parsial.
Definisi 2.4.1
Persamaan diferensial adalah suatu persamaan yang melibatkan turunan satu atau
lebih variabel terikat yang berhubungan dengan satu atau lebih variabel bebas.
Contoh 2.4.1
Beberapa contoh di bawah ini merupakan persamaan diferensial: 𝑑𝑦 𝑑𝑡 = 𝑦 + 2, (2.4.1) 𝜕𝑢 𝜕𝑡 + 𝜕𝑢 𝜕𝑥 = 𝑓(𝑢), (2.4.2) 𝑑2𝑦 𝑑𝑥2+ 2𝑦 ( 𝑑𝑦 𝑑𝑥) 2 = 0, (2.4.3)
𝜕2𝑣 𝜕𝑦2− 𝜕2𝑣 𝜕𝑥2 − 𝜕2𝑣 𝜕𝑥𝜕𝑦= 0. (2.4.4) Definisi 2.4.2
Persamaan diferensial biasa adalah persamaan diferensial yang hanya melibatkan
turunan biasa terhadap satu variabel bebas.
Contoh 2.4.2
Contoh dari persamaan diferensial biasa terdapat pada persamaan (2.4.1) dan (2.4.3). Persamaan (2.4.1) adalah persamaan diferensial biasa order satu dengan 𝑡 merupakan variabel bebas, sedangkan 𝑦 merupakan variabel terikat. Persamaan (2.4.3) adalah persamaan diferensial biasa tingkat dua dengan 𝑥 merupakan variabel bebas sedangkan 𝑦 merupakan variabel terikat.
Definisi 2.4.3
Persamaan diferensial parsial adalah persamaan diferensial yang menyatakan
hubungan antara turunan/derivatif parsial dengan variabel-variabel bebasnya.
Contoh 2.4.3
Contoh dari persamaan diferensial biasa terdapat pada persamaan (2.4.2) dan (2.4.4). Persamaan (2.4.2) adalah persamaan diferensial parsial order satu dengan 𝑡 dan 𝑥 merupakan variabel bebas, sedangkan 𝑢 merupakan variabel terikat. Persamaan (2.4.4) adalah persamaan diferensial biasa tingkat dua dengan 𝑥, 𝑦, dan 𝑧 merupakan variabel bebas, sedangkan 𝑣 merupakan variabel terikat.
E. Metode Karakteristik Definisi 2.5.1
Persamaan diferensial parsial dikatakan linear jika:
a) tidak ada perkalian antara variabel-variabel tak bebas dengan dirinya sendiri
atau dengan turunan-turunannya,
b) tidak ada fungsi transendental (trigonometri, logaritma, eksponensial,
siklometri, hiperbolik) yang terlibat dari fungsi dalam variabel-variabel tak
bebas.
Definisi 2.5.2
Tingkat atau order dalam persamaan diferensial parsial didefinisikan sebagai
tingkat dari turunan tertinggi yang muncul pada persamaan diferensial parsial.
Definisi 2.5.3
Dipandang persamaan diferensial parsial linear order satu berikut 𝑎(𝑥, 𝑦)𝑢𝑥+ 𝑏(𝑥, 𝑦)𝑢𝑦+ 𝑐(𝑥, 𝑦)𝑢 = 𝑓(𝑥, 𝑦). Kurva-kurva yang memenuhi persamaan diferensial biasa yaitu
𝑑𝑥 𝑎(𝑥, 𝑦)=
𝑑𝑦 𝑏(𝑥, 𝑦) disebut kurva karakteristik persamaan diferensial tersebut. Catatan: notasi 𝑢𝑥 bermakna 𝜕𝑢(𝑥, 𝑦) 𝜕𝑥⁄ .
Penurunan persamaan diatas dapat dilihat pada buku karangan Lokenath Debnath
yang berjudul Nonlinear Partial Differential Equations for Scientists and Engineers. Misalkan persamaan diferensial biasa diatas mempunyai penyelesaian ℎ(𝑥, 𝑦) = 𝑘, dengan membuat transformasi
𝜂 = ℎ(𝑥, 𝑦), maka 𝑢𝑥 =𝜕𝑢(𝑥, 𝑦) 𝜕𝑥 = 𝜕𝑢 𝜕𝜉 𝜕𝜉 𝜕𝑥+ 𝜕𝑢 𝜕𝜂 𝜕𝜂 𝜕𝑥, atau 𝑢𝑥= 𝑢𝜉. 1 + 𝑢𝜂ℎ𝑥, atau 𝑢𝑥 = 𝑢𝜉+ 𝑢𝜂ℎ𝑥, dan 𝑢𝑦 =𝜕𝑢(𝑥, 𝑦) 𝜕𝑦 = 𝜕𝑢 𝜕𝜉 𝜕𝜉 𝜕𝑦+ 𝜕𝑢 𝜕𝜂 𝜕𝜂 𝜕𝑦, atau 𝑢𝑥= 𝑢𝜉. 0 + 𝑢𝜂𝜂𝑦, atau 𝑢𝑥 = 𝑢𝜂𝜂𝑦, atau 𝑢𝑥 = 𝑢𝜂ℎ𝑦. Contoh 2.5.1
Tentukan penyelesaian dari persamaan 𝑢𝑥+ 𝑦𝑢𝑦 = 𝑥 dengan 𝑢(1, 𝑦) = cos 𝑦. Penyelesaian:
Karakteristik dari persamaan tersebut diberikan oleh 𝑑𝑥
1 = 𝑑𝑦
∫ 𝑑𝑥 = ∫𝑑𝑦 𝑦 , 𝑥 + 𝑘 = ln 𝑦,
𝑒𝑥𝑒𝑘= 𝑦,
𝑦 = 𝑐𝑒𝑥 atau c = 𝑦𝑒−𝑥. Kemudian, ditransformasi menjadi
𝜉 = 𝑥 atau 𝑥 = 𝜉, 𝜂 = 𝑦𝑒−𝑥 atau 𝑦 = 𝜂𝑒𝑥. Persamaan diferensial parsial tersebut menjadi
𝑢𝜉 = 𝜉, sehingga, 𝜕𝑢 𝜕𝜉 = 𝜉, ∫ 𝜕𝑢 = ∫ 𝜉𝜕𝜉, 𝑢 =𝜉2 2 + 𝑔(𝜂) = 𝑥2 2 + 𝑔(𝑦𝑒−𝑥), dan u(1, 𝑦) = cos 𝑦 =12+ 𝑔(𝑦𝑒−1).
Misal 𝑧 =𝑦𝑒 maka 𝑦 = 𝑒𝑧 didapat 𝑔(𝑧) = cos 𝑒𝑧 −12. Jadi, penyelesaiannya 𝑢 =𝑥22+ 𝑐𝑜𝑠(𝑦𝑒−𝑥) −1
2.
F. Metode Volume Hingga
Pada subbab ini akan dijelaskan skema upwind dan skema volume hingga
1. Skema Upwind
Dipandang persamaan diferensial hiperbolik order satu yaitu 𝑞𝑡+ 𝑐𝑞𝑥 = 0
dengan 𝑐 ∈ ℝ+ (arah rambatannya ke kanan). Skema upwind untuk persamaan diatas adalah
𝑄𝐼𝑛+1 = 𝑄 𝐼𝑛−
∆𝑡
∆𝑥(𝐹𝑖+1 2𝑛 ⁄ − 𝐹𝑖−1 2𝑛 ⁄ ). Fluks upwind untuk 𝐹𝑖−1 2𝑛 ⁄ dan 𝐹
𝑖+1 2𝑛 ⁄ didefinisikan sebagai 𝐹𝑖+1 2𝑛 ⁄ ≈ 𝑓(𝑞(𝑥𝑖, 𝑡𝑛)), 𝐹𝑖+1 2𝑛 ⁄ ≈ 𝑐𝑞(𝑥𝑖, 𝑡𝑛), 𝐹𝑖+1 2𝑛 ⁄ ≈ 𝑐𝑄𝑖𝑛, dan 𝐹𝑖−1 2𝑛 ⁄ ≈ 𝑓(𝑞(𝑥𝑖−1, 𝑡𝑛)), 𝐹𝑖−1 2𝑛 ⁄ ≈ 𝑐𝑞(𝑥𝑖−1, 𝑡𝑛), 𝐹𝑖−1 2𝑛 ⁄ ≈ 𝑐𝑄𝑖−1𝑛 .
2. Skema Volume Hingga
Dipandang persamaan diferensial parsial berbentuk hukum kekekalan
hiperbolik
𝑞𝑡+ 𝑓(𝑞)𝑥 = 0
Diambil nilai 𝑄𝑖𝑛 sebagai pendekatan nilai rata-rata interval ke-𝑖 pada waktu ke 𝑡𝑛 sebagai berikut
𝑄𝑖𝑛 = 1
∆𝑥∫ 𝑞(𝑥, 𝑡𝑛)𝑑𝑥 𝑥𝑖+1 2⁄
dengan ∆𝑥 = 𝑥𝑖+1 2− 𝑥𝑖−
1
2 , yang fluks volume hingganya pada 𝑥 = 𝑥𝑖+ 1 2 diberikan oleh 𝐹 𝑖+12 𝑛 = 1 ∆𝑡∫ 𝑓(𝑞(𝑥𝑖, 𝑡))𝑑𝑡 𝑡𝑛+1 𝑡𝑛 maka 𝑄𝑖𝑛+1− 𝑄𝑖𝑛 ∆𝑡 + 𝐹 𝑖+12 𝑛 − 𝐹 𝑖−12 𝑛 ∆𝑥 = 0, atau 𝑄𝑖𝑛+1− 𝑄 𝑖𝑛 ∆𝑡 = − 𝐹 𝑖+12 𝑛 − 𝐹 𝑖−12 𝑛 ∆𝑥 , atau 𝑄𝑖𝑛+1− 𝑄 𝑖𝑛 = −∆𝑡 𝐹 𝑖+12 𝑛 − 𝐹 𝑖−12 𝑛 ∆𝑥 , atau 𝑄𝑖𝑛+1 = 𝑄𝑖𝑛− ∆𝑡 ∆𝑥(𝐹𝑖+12 𝑛 − 𝐹 𝑖−12 𝑛 ). G. Metode Garis
Metode garis merupakan teknik secara umum untuk menyelesaikan
persamaan diferensial parsial dengan menggunakan beda hingga yang berhubungan
dengan turunan pada ruang dan persamaan diferensial biasa pada turunan waktu.
Definisi 2.6.1
Persamaan diferensial parsial order satu dikatakan hiperbolik jika matriks Jacobian
Definisi 2.6.2
Dipandang persamaan diferensial parsial hiperbolik order satu dalam domain ruang 0 ≤ 𝑥 ≤ 𝐿 dan domain waktu 𝑡 > 0
𝑢𝑡+ 𝑣𝑢𝑥 = 0 (2.6.1)
Persamaan di atas disebut persamaan adveksi linear dengan 𝑣 adalah konstanta yang menyatakan kecepatan arus. Aproksimasi metode garis pada persamaan (2.6.1)
yaitu: 𝑑𝑢𝑖 𝑑𝑡 = −𝑣 𝑢𝑖 − 𝑢𝑖−1 ∆𝑥 1 ≤ 𝑖 ≤ 𝑛 dengan ∆𝑥 =𝐿𝑛.
Catatan: Persamaan dapat ditulis sebagai persamaan diferensial biasa jika persamaan hanya bergantung pada satu variabel bebas (𝑡).
H. Matriks Jacobian
Diketahui 𝑦̅ = 𝑓(𝑥̅) yang terdiri dari 𝑛 buah persamaan dengan 𝑥̅ = (𝑥1, 𝑥2, 𝑥3, … , 𝑥𝑛) yaitu 𝑦̅ = [ 𝑓1(𝑥̅) 𝑓2(𝑥̅) .. . 𝑓𝑛(𝑥̅)] , (2.7.1)
{ 𝑦1 = 𝑓1(𝑥1, 𝑥2, … , 𝑥𝑛), 𝑦2 = 𝑓2(𝑥1, 𝑥2, … , 𝑥𝑛), . . . 𝑦𝑛 = 𝑓𝑛(𝑥1, 𝑥2, … , 𝑥𝑛). (2.7.2)
Matriks Jacobian didefinisikan sebagai
𝐽(𝑥1, 𝑥2, … , 𝑥𝑛) = [ 𝜕𝑦1 𝜕𝑥1 ⋯ 𝜕𝑦1 𝜕𝑥𝑛 ⋮ ⋱ ⋮ 𝜕𝑦𝑛 𝜕𝑥1 ⋯ 𝜕𝑦𝑛 𝜕𝑥𝑛] . (2.7.3)
Determinan Jacobian didefiniskan sebagai
|𝐽| = |𝜕(𝑦1, 𝑦2, … , 𝑦𝑛)
𝜕(𝑥1, 𝑥2, … , 𝑥𝑛)|. (2.7.4)
I. Nilai Eigen dan Vektor Eigen Definisi 2.8.1 (Leon, 2001)
Misalkan 𝑨 adalah suatu matriks 𝑛 × 𝑛. Skalar 𝜆 disebut sebagai suatu nilai eigen atau nilai karakteristik (characteristic value) dari 𝑨 jika dan hanya jika terdapat suatu vektor tak nol x, sehingga 𝑨x = 𝜆x. Vektor x disebut vektor eigen atau
vektor karakteristik yang berkorespondensi dengan 𝜆. Contoh 2.8.1
Tentukan nilai eigen jika diketahui
𝑨 = (4 −2
1 1 ) dan x= (21). Penyelesaian:
Karena
𝑨x= (4 −21 1 ) (21) = (63) = 3 (21) = 3x.
Dari persamaan ini terlihat bahwa 𝜆 = 3 adalah nilai eigen dari 𝑨 dan x merupakan vektor eigen dari 𝜆. Sesungguhnya, sembarang kelipatan taknol dari vektor eigen x akan menjadi vektor eigen, karena
𝑨(𝛼𝐱) = 𝑨𝛼𝐱 = 𝛼𝑨𝐱 = α𝜆𝐱 = 𝜆(𝛼𝐱)
Jadi, sebagai contoh (4,2)𝑇 juga vektor eigen milik 𝜆 = 3. Hal ini dapat di lihat dari (4 −2
1 1 ) (42) = (126) = 3 (42).
Contoh 2.8.2
Carilah nilai-nilai eigen dan vektor eigen yang bersesuaian dengan matriks
𝑨 = (3 2 3 −2) Penyelesaian:
Persamaan karakteristiknya adalah
|3 − 𝜆 2
3 −2 − 𝜆| = 0, atau 𝜆2− 𝜆 − 12 = 0.
Jadi, nilai-nilai eigen dari 𝑨 adalah 𝜆1 = 4 dan 𝜆2 = −3. Untuk mencari vektor eigen yang dimiliki oleh 𝜆1 = 4, kita harus menentukan ruang nol dari 𝑨 − 4𝑰.
𝑨 − 4𝑰 = (−13 −62 ) Dengan menyelesaikan (𝑨 − 4𝑰)𝐱 = 𝟎, kita mendapatkan
Jadi semua kelipatan tak nol (2,1)𝑇 adalah vektor eigen milik 𝜆
1 dan {(2,1)𝑇} adalah suatu vektor eigen untuk ruang eigen yang bersesuaian dengan 𝜆1. Dengan cara yang sama, untuk mendapatkan vektor eigen bagi 𝜆2, kita harus menyelesaikan Pada kasus ini, {(−1,3)𝑇} adalah basis untuk 𝑁(𝑨 + 3𝑰) dan sembarang kelipatan taknol dari {(−1,3)𝑇} adalah vektor eigen milik 𝜆
2. Di sini, 𝑁 melambangkan ruang nol.
28
BAB III
PENYELESAIAN MODEL ARUS LALU LINTAS
A. Hubungan Kecepatan, Kepadatan, dan Arus Lalu Lintas
Dalam masalah arus lalu lintas, ada tiga variabel dasar lalu lintas yaitu
kecepatan kendaraan, kepadatan lalu lintas, dan arus lalu lintas. Untuk
menunjukkan ketiga hubungan variabel tersebut, ada salah satu kemungkinan yang
terjadi yaitu situasi lalu lintas yang sederhama. Misalkan, lalu lintas pada jalan yang sama bergerak dengan kecepatan konstan 𝑢0 dan kepadatan lalu lintas konstan 𝜌0. Ilustrasi ditunjukan oleh Gambar 3.1.
Gambar 3.1 Lalu lintas kendaraan konstan.
Karena kecepatan setiap kendaraan konstan maka jarak antar kendaraan
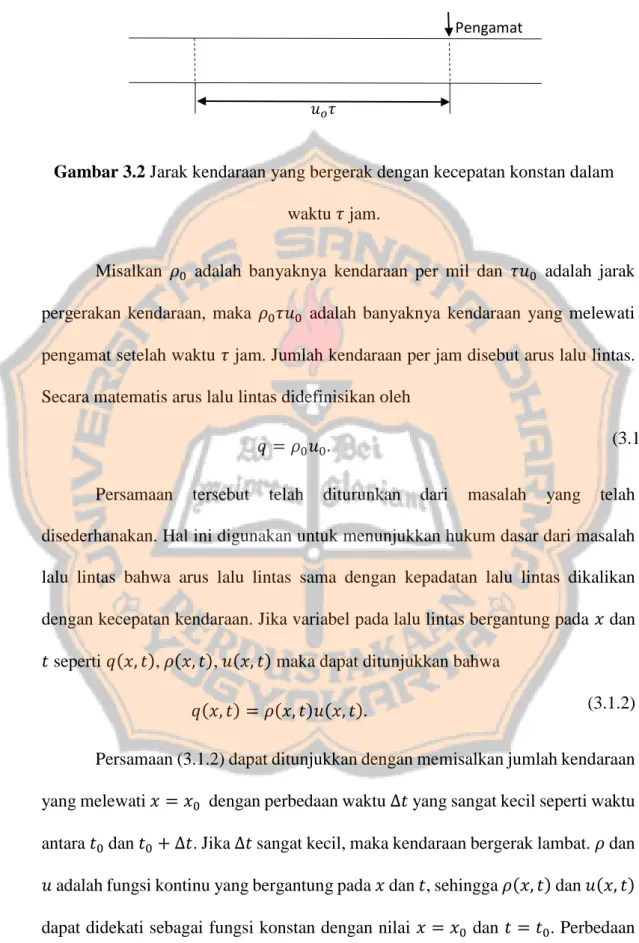
akan tetap konstan. Oleh karena itu, kepadatan lalu lintas tidak akan berubah seperti jumlah kendaraan yang diamati oleh pengamat per jamnya. Setelah waktu 𝜏 jam, setiap kendaraan bergerak sejauh 𝜏𝑢0, yaitu pergerakan pengemudi dalam kendaraan akan sama dengan kecepatan kendaraan dikalikan dengan waktu. Jadi, jumlah kendaraan dalam jarak 𝜏𝑢0 adalah banyaknya kendaraan yang diamati oleh pengamat yang melewati posisi pengamat setelah waktu 𝜏 jam (lihat Gambar 3.2).
Gambar 3.2 Jarak kendaraan yang bergerak dengan kecepatan konstan dalam
waktu 𝜏 jam.
Misalkan 𝜌0 adalah banyaknya kendaraan per mil dan 𝜏𝑢0 adalah jarak pergerakan kendaraan, maka 𝜌0𝜏𝑢0 adalah banyaknya kendaraan yang melewati pengamat setelah waktu 𝜏 jam. Jumlah kendaraan per jam disebut arus lalu lintas. Secara matematis arus lalu lintas didefinisikan oleh
𝑞 = 𝜌0𝑢0. (3.1.1)
Persamaan tersebut telah diturunkan dari masalah yang telah
disederhanakan. Hal ini digunakan untuk menunjukkan hukum dasar dari masalah
lalu lintas bahwa arus lalu lintas sama dengan kepadatan lalu lintas dikalikan dengan kecepatan kendaraan. Jika variabel pada lalu lintas bergantung pada 𝑥 dan 𝑡 seperti 𝑞(𝑥, 𝑡), 𝜌(𝑥, 𝑡), 𝑢(𝑥, 𝑡) maka dapat ditunjukkan bahwa
𝑞(𝑥, 𝑡) = 𝜌(𝑥, 𝑡)𝑢(𝑥, 𝑡). (3.1.2) Persamaan (3.1.2) dapat ditunjukkan dengan memisalkan jumlah kendaraan yang melewati 𝑥 = 𝑥0 dengan perbedaan waktu ∆𝑡 yang sangat kecil seperti waktu antara 𝑡0 dan 𝑡0+ ∆𝑡. Jika ∆𝑡 sangat kecil, maka kendaraan bergerak lambat. 𝜌 dan 𝑢 adalah fungsi kontinu yang bergantung pada 𝑥 dan 𝑡, sehingga 𝜌(𝑥, 𝑡) dan 𝑢(𝑥, 𝑡) dapat didekati sebagai fungsi konstan dengan nilai 𝑥 = 𝑥0 dan 𝑡 = 𝑡0. Perbedaan
𝑢𝑜𝜏
waktu ∆𝑡 yang sangat kecil dan kendaraan melewati ruas jalan yang sempit maka arus lalu lintas dapat diaproksimasi dengan 𝑢(𝑥, 𝑡)∆𝑡 yang melalui pengamat, seperti yang ditunjukkan pada Gambar 3.3. Oleh karena itu, banyaknya kendaraan
yang melewati ruas jalan dapat diaproksimasi dengan 𝑢(𝑥, 𝑡)∆𝑡𝜌(𝑥, 𝑡) sehingga arus lalu lintas diberikan oleh persamaan (3.1.2). Fungsi konstan 𝑢0 dan 𝜌0 tidak membutuhkan modifikasi seperti fungsi 𝑢(𝑥, 𝑡) dan 𝜌(𝑥, 𝑡). Akibatnya, ada tiga variabel dasar dalam masalah lalu lintas yaitu kepadatan lalu lintas 𝜌(𝑥, 𝑡), kecepatan kendaraan 𝑢(𝑥, 𝑡), dan arus lalu lintas 𝑞(𝑥, 𝑡) yang sesuai pada persamaan (3.1.2).
Gambar 3.3 Aproksimasi perbedaan pergerakan kendaraan dalam waktu ∆𝑡.
B. Model Deterministik Arus Lalu Lintas
Misalkan kondisi awal untuk kepadatan arus lalu lintas (𝜌(𝑥, 𝑡)) dan kecepatan kendaraan (𝑢(𝑥, 𝑡)) diketahui pada panjang jalannya yang tak terhingga. Pergerakan setiap kendaraan didefinisikan dengan persamaan diferensial biasa
order satu, yaitu:
𝑑𝑥
𝑑𝑡 = 𝑢(𝑥, 𝑡) (3.2.1)
dengan 𝑥(0) = 𝑥0.
Persamaan (3.2.1) menyatakan persamaan yang bergantung pada posisi
setiap kendaraan pada waktu tertentu. Penyelesaian dari persamaan tersebut berupa
fungsi kepadatan lalu lintas (𝜌(𝑥, 𝑡)). Akibatnya, kecepatan kendaraan mempengaruhi kepadatan lalu lintas.
Diketahui interval panjang ruas jalan dari 𝑥 = 𝑎 sampai 𝑥 = 𝑏 seperti pada Gambar 3.4.
Gambar 3.4 Kendaraan yang masuk dan keluar dari ruas jalan.
Jadi, jumlah kendaraan (𝑁) pada interval 𝑥 = 𝑎 sampai 𝑥 = 𝑏 adalah 𝑁 = ∫ 𝜌(𝑥, 𝑡) 𝑑𝑥.𝑏
𝑎
(3.2.2)
Jika tidak ada ruas jalan lain yang digunakan untuk masuk dan keluarnya kendaraan, maka jumlah kendaraan dari 𝑥 = 𝑎 sampai 𝑥 = 𝑏 akan berubah yang perubahannya hanya dipengaruhi oleh posisi di 𝑥 = 𝑎 dan 𝑥 = 𝑏. Jumlah kendaraan akan berkurang jika kendaraan-kendaraan keluar dari daerah melalui 𝑥 = 𝑏, tetapi jumlah kendaraan akan bertambah jika kendaraan-kendaraan masuk ke dalam
daerah melalui 𝑥 = 𝑎. Perubahan jumlah kendaraan (𝑑𝑁𝑑𝑡) yaitu jumalhkendaraan dalam waktu tertentu yang masuk ke daerah melalui 𝑥 = 𝑎 dikurangi dengan
jumlah kendaraan dalam waktu tertentu yang keluar dari daerah melalui 𝑥 = 𝑏 dirumuskan dengan 𝑑 𝑑𝑡𝑁 = 𝑑 𝑑𝑡∫ 𝜌(𝑥, 𝑡) 𝑑𝑥 𝑏 𝑎 , 𝑑𝑁 𝑑𝑡 = 𝑞(𝑎, 𝑡) − 𝑞(𝑏, 𝑡), (3.2.3)
dengan 𝑞(𝑥, 𝑡) adalah perubahan jumlah kendaraan tiap satuan waktu. Penyelesaian persamaan (3.2.3) tersebut sulit untuk dicari dengan cara langsung sehingga
diselesaikan sebagai berikut 𝑁(𝑡 + ∆𝑡) − 𝑁(𝑡)
∆𝑡 ≈ 𝑞(𝑎, 𝑡) − 𝑞(𝑏, 𝑡) ,
𝑁(𝑡 + ∆𝑡) − 𝑁(𝑡) ≈ 𝑞(𝑎, 𝑡)∆𝑡 − 𝑞(𝑏, 𝑡)∆𝑡 , (3.2.4) dengan 𝑁(𝑡 + ∆𝑡) − 𝑁(𝑡) adalah perubahan jumlah kendaraan antara waktu 𝑡 dan 𝑡 + ∆𝑡.
Jika 𝑞(𝑥, 𝑡) adalah perubahan jumlah kendaraan yang melewati ruas jalan pada waktu tertentu, maka ∫ 𝑞(𝑥, 𝑡)𝑑𝑡𝑡𝑡1
0 adalah jumlah kendaraan yang melewati
ruas jalan pada waktu tertentu antara 𝑡 = 𝑡0 dan 𝑡 = 𝑡1. Pada penurunan pendekatan nya, 𝑡 + ∆𝑡 = 𝑡1 dan 𝑡 = 𝑡0 yang integralnya mendekati 𝑞(𝑥, 𝑡)∆𝑡, sehingga
𝑁(𝑡1) − 𝑁(𝑡0) = ∫ 𝑞(𝑎, 𝑡)𝑑𝑡𝑡1 𝑡0 − ∫ 𝑞(𝑏, 𝑡)𝑑𝑡 𝑡1 𝑡0 = ∫ (𝑞(𝑎, 𝑡) − 𝑞(𝑏, 𝑡)) 𝑡1 𝑡0 𝑑𝑡. (3.2.5)
𝑁(𝑡1) − 𝑁(𝑡0) = ∫ (𝑞(𝑎, 𝑡) − 𝑞(𝑏, 𝑡)) 𝑡1 𝑡0 𝑑𝑡, 𝑁(𝑡1) − 𝑁(𝑡0) 𝑡1 − 𝑡0 = ∫ (𝑞(𝑎, 𝑡) − 𝑞(𝑏, 𝑡))𝑡1 𝑡0 𝑑𝑡 𝑡1 − 𝑡0 , lim 𝑡1→𝑡0 𝑁(𝑡1) − 𝑁(𝑡0) 𝑡1− 𝑡0 = lim𝑡1→𝑡0 ∫ (𝑞(𝑎, 𝑡) − 𝑞(𝑏, 𝑡))𝑡𝑡1 0 𝑑𝑡 𝑡1− 𝑡0 , 𝑑𝑁(𝑡1) 𝑑𝑡1 = 𝑑 𝑑𝑡1∫ (𝑞(𝑎, 𝑡) − 𝑞(𝑏, 𝑡)) 𝑡1 𝑡0 𝑑𝑡. (3.2.6)
Menurut Teorema Fundamental Kalkulus, persaman (3.2.6) menghasilkan 𝑑𝑁(𝑡1)
𝑑𝑡1 = 𝑞(𝑎, 𝑡) − 𝑞(𝑏, 𝑡).
(3.2.7)
Di sini 𝑡1 dapat berada di sembarang waktu 𝑡 sehingga notasi 𝑡1 dapat digantikan dengan notasi 𝑡 jadi diperoleh
𝑑𝑁(𝑡)
𝑑𝑡 = 𝑞(𝑎, 𝑡) − 𝑞(𝑏, 𝑡).
(3.2.8)
Dengan mengkombinasikan antara persamaan (3.2.1) dan (3.2.8) diperoleh 𝑑
𝑑𝑡∫ 𝜌(𝑥, 𝑡)𝑑𝑥 𝑏
𝑎
= 𝑞(𝑎, 𝑡) − 𝑞(𝑏, 𝑡) . (3.2.9) Persamaan di atas menunjukkan bahwa tidak ada kendaraan yang masuk atau keluar
tanpa melalui batas dan perubahan banyaknya kendaraan hanya terjadi pada batas lalu lintas. Hal ini bukan berarti bahwa banyaknya kendaraan antara 𝑥 = 𝑎 dan 𝑥 = 𝑏 konstan. Jadi, persamaan (3.2.9) disebut hukum konservasi berbentuk integral yang menunjukkan panjang lalu lintasnya berhingga di antara 𝑎 ≤ 𝑥 ≤ 𝑏.
Contoh:
Misalkan 𝑥 menuju ±∞ sehingga aliran kendaraan menuju nol pada jalan layang yang takhingga panjangnya yaitu
lim
𝑥→±∞𝑞(𝑥, 𝑡) = 0 Dengan menggunakan persamaan (3.2.9) didapat
𝑑 𝑑𝑡∫ 𝜌(𝑥, 𝑡)𝑑𝑥 ∞ −∞ = 0, atau ∫ 𝜌(𝑥, 𝑡)𝑑𝑥∞ −∞ = 𝑐, dengan 𝑐 adalah konstan.
Persamaan tersebut menunjukkan bahwa jumlah kendaraan akan tetap konstan pada
sepanjang waktu, tetapi hanya bisa diselesaikan jika kondisi awal jumlah kendaraan
adalah 𝑁0 atau kondisi awal kepadatan lalu lintas 𝜌(𝑥, 0) diketahui, sehingga: ∫ 𝜌(𝑥, 𝑡)𝑑𝑥 ∞ −∞ = 𝑁0 = ∫ 𝜌(𝑥, 0)𝑑𝑥 ∞ −∞ .
Hukum konservasi berbentuk integral pada persamaan (3.2.9) disebut hukum
konservasi lokal pada posisi setiap jalan. Permasalahan yang diselesaikan dengan tiga cara itu, titik akhir pada ruas jalan adalah 𝑥 = 𝑎 dan 𝑥 = 𝑏 yang merupakan kondisi (variabel terikat) tambahan. Dari keterangan di atas, persamaan (3.2.9)
harus diganti dengan turunan parsial yaitu 𝜕
𝜕𝑡∫ 𝜌(𝑥, 𝑡)𝑑𝑥 𝑏
𝑎
= 𝑞(𝑎, 𝑡) − 𝑞(𝑏, 𝑡). (3.2.10) Diasumsikan 𝑥 = 𝑎 dan 𝑥 = 𝑏 adalah posisi yang tetap pada setiap waktu (lihat persamaan 3.2.9).
(1) Perhatikan integral konservasi dari kendaraan dalam interval yang kecil pada jalan layang dari 𝑥 = 𝑎 sampai 𝑥 = 𝑎 + ∆𝑎.
Persamaan (3.2.10) menjadi 𝜕 𝜕𝑡∫ 𝜌(𝑥, 𝑡)𝑑𝑥 𝑎+∆𝑎 𝑎 = 𝑞(𝑎, 𝑡) − 𝑞(𝑎 + ∆𝑎, 𝑡) 1 −∆𝑎 𝜕 𝜕𝑡∫ 𝜌(𝑥, 𝑡)𝑑𝑥 𝑎+∆𝑎 𝑎 = 1 −∆𝑎(𝑞(𝑎, 𝑡) − 𝑞(𝑎 + ∆𝑎, 𝑡)) lim ∆𝑎→0 1 −∆𝑎 𝜕 𝜕𝑡∫ 𝜌(𝑥, 𝑡)𝑑𝑥 𝑎+∆𝑎 𝑎 = lim ∆𝑎→0 1 −∆𝑎(𝑞(𝑎, 𝑡) − 𝑞(𝑎 + ∆𝑎, 𝑡)) lim ∆𝑎→0 𝜕 𝜕𝑡 1 −∆𝑎∫ 𝜌(𝑥, 𝑡)𝑑𝑥 𝑎+∆𝑎 𝑎 = lim ∆𝑎→0 𝑞(𝑎, 𝑡) − 𝑞(𝑎 + ∆𝑎, 𝑡) −∆𝑎 (3.2.11)
Pada persamaan (3.2.10), ruas kanan adalah definisi turunan dari 𝑞(𝑎, 𝑡) terhadap 𝑎 yaitu 𝜕
𝜕𝑎𝑞(𝑎, 𝑡). Sedangkan, ruas kiri adalah limitnya yang ditunjukkan dengan dua cara, yaitu:
a. Integral adalah luas daerah di bawah kurva 𝜌(𝑥, 𝑡) antara 𝑥 = 𝑎 dan 𝑥 = 𝑎 + ∆𝑎. Dengan ∆𝑎 yang cukup kecil, maka jumlah kendaraan antara 𝑥 = 𝑎 dan 𝑥 = 𝑎 + ∆𝑎 adalah
1
−∆𝑎∫ 𝜌(𝑥, 𝑡)𝑑𝑥 𝑎+∆𝑎
𝑎
≈ − 𝜌(𝑎, 𝑡) (3.2.12) Oleh karena itu, persamaan (3.2.11) dapat diturunkan menjadi
𝜕
𝜕𝑡𝜌(𝑎, 𝑡) + 𝜕
𝜕𝑎𝑞(𝑎, 𝑡) = 0.
b. Fungsi 𝑁(𝑥̅, 𝑡), jumlah kendaraan di jalan raya di antara sembarang posisi tetap 𝑥0 dan variabel posisi 𝑥 yaitu:
𝑁(𝑥̅, 𝑡) ≡ ∫ 𝜌(𝑥, 𝑡)𝑑𝑥𝑥̅ 𝑥0
. (3.2.14)
Kelajuan rata-rata kendaraan antara 𝑎 dan 𝑎 + ∆𝑎 setiap mil adalah 1 −∆𝑎∫ 𝜌(𝑥, 𝑡)𝑑𝑥 𝑎+∆𝑎 𝑎 =𝑁(𝑎 + ∆𝑎, 𝑡) − 𝑁(𝑎) −∆𝑎 , lim ∆𝑎→0 1 −∆𝑎∫ 𝜌(𝑥, 𝑡)𝑑𝑥 𝑎+∆𝑎 𝑎 = lim ∆𝑎→0 𝑁(𝑎 + ∆𝑎, 𝑡) − 𝑁(𝑎) −∆𝑎 .
Dengan menggunakan Teorema Fundamental Kalkulus didapat 𝜕𝑁(𝑎, 𝑡)
𝜕𝑎 = 𝜌(𝑎, 𝑡).
(3.2.15)
Persamaan (3.2.10) dapat diselesaikan juga dengan menggunakan
metode (a) atau (b). Karena persamaan (3.2.10) mengandung semua nilai 𝑎, maka 𝑎 dapat digantikan dengan 𝑥 yaitu
𝜕 𝜕𝑡𝜌(𝑥, 𝑡) + 𝜕 𝜕𝑥[𝑞(𝑥, 𝑡)] = 0, (3.2.16) atau 𝜕𝜌 𝜕𝑡 + 𝜕𝑞 𝜕𝑥= 0. (3.2.17)
Persamaan ini disebut persamaan diferensial parsial yang menunjukkan
hubungan antara kepadatan lalu lintas dan arus lalu lintas yang
diasumsikan bahwa jumlah kendaraan tetap pada waktu tertentu yang
disebut hukum konservasi.
Perhatikan hukum konservasi berbentuk integral pada persamaan (3.2.10) untuk
berhingga ruas garis pada jalan layang antara 𝑎 ≤ 𝑥 ≤ 𝑏. Diambil turunan parsial terhadap 𝑏, yaitu 𝑏 = 𝑎 + ∆𝑎 yang dibagi dengan ∆𝑎 dan diambil limit ∆𝑎 → 0, didapat 𝜕𝜌(𝑏, 𝑡) 𝜕𝑡 = − 𝜕 𝜕𝑏(𝑞(𝑏, 𝑡)). (3.2.18)
Karena 𝑏 merepresentasikan sembarang posisi di jalan raya sehingga 𝑏 dapat digantikan dengan 𝑥. Jadi, persamaan tersebut memenuhi persamaan hukum konservasi seperti pada persamaan (3.2.16).
(3) Penurunan hukum konservasi pada ruas jalan yang panjangnya berhingga
antara 𝑎 ≤ 𝑥 ≤ 𝑏 yang hubungannya dengan ruas kanan pada persamaan (3.2.16) . 𝑞(𝑎, 𝑡) − 𝑞(𝑏, 𝑡) = − 𝜕 𝜕𝑡∫ [𝑞(𝑥, 𝑡)]𝑑𝑥 𝑏 𝑎 . (3.2.19)
Dari persamaan (3.2.16) didapat
∫ [𝜕𝜌(𝑥, 𝑡) 𝜕𝑡 + 𝜕𝑞(𝑥, 𝑡) 𝜕𝑥 ] 𝑏 𝑎 𝑑𝑥 = 0. (3.2.20)
Persamaan di atas dapat diturunkan terhadap 𝑏 seperti pada persamaan (3.2.16), yang akan didapat seperti pada kasus (1) dan (2). Persamaan (3.2.20)
adalah definisi dari beberapa kuantitas integral yang hasilnya selalu nol untuk
setiap nilai yang bebas yang diambil limitnya. Fungsi yang diintegralkan yang
hasilnya nol untuk sembarang interval adalah fungsi nol. Oleh karana itu,
didapat persamaan (3.2.10).
𝜕𝜌 𝜕𝑡 +
𝜕𝑞
𝜕𝑥 = 0. (3.2.21)
Persamaan (3.2.21) sesuai jika tidak ada jalan yang masuk ataupun keluar yang
menginterpretasikan hukum konservasi dalam berbagai situasi dengan tidak adanya lalu lintas. Secara umum, jika 𝜌 adalah kepadatan dari kuantitas lokal dan 𝑞 adalah arus dari kuantitas batas persimpangan maka persamaannya seperti pada persamaan (3.2.21). Namun masalah arus lalu lintas didefinisikan sebagai
𝑞 = 𝜌𝑢.
Oleh karena itu, hukum konservasi dapat ditulis sebagai 𝜕𝜌
𝜕𝑡 + 𝜕
𝜕𝑥(𝜌𝑢) = 0.
(3.2.22)
Persamaan tersebut merupakan persamaan diferensial parsial untuk
masalah lalu lintas yang berhubungan dengan kepadatan lalu lintas dan
kecepatan kendaraan.
C. Linearisasi Model Lalu Lintas
Dipandang model deterministik arus lalu lintas berbentuk persamaan
diferensial parsial 𝜕𝜌 𝜕𝑡 + 𝜕 𝜕𝑥(𝜌𝑢) = 0, (3.3.1) atau 𝜕𝜌 𝜕𝑡 + 𝜕𝑞 𝜕𝑥 = 0. (3.3.2)
𝜕𝜌 𝜕𝑡 + 𝜕𝑞 𝜕𝜌 𝜕𝜌 𝜕𝑥= 0.
Karena 𝑞 merupakan fungsi yang hanya bergantung pada 𝜌 maka 𝜕𝜌 𝜕𝑡 + 𝑑𝑞 𝑑𝜌 𝜕𝜌 𝜕𝑥 = 0, (3.3.3)
dengan 𝜌 adalah fungsi kontinu non linear. Diketahui nilai awal kepadatan lalu lintas
𝜌(𝑥, 0) = 𝑓(𝑥).
Persamaan diferensial parsial untuk arus lalu lintas tersebut tidak dapat
diselesaikan dengan menggunakan integral seperti contoh di bawah ini apabila
diketahui nilai awal 𝜌(0) = 𝜌0 yang dapat diselesaikan mirip dengan cara menyelesaikan persamaan diferensial biasa.
Contoh 1
Akan diselesaikan
𝜕𝜌 𝜕𝑡 = 0.
Persamaan diferensial tersebut dapat langsung diintegralkan, yaitu
∫ 𝜕𝜌 = 0 ∫ 𝜕𝑡, 𝜌 = c, dengan 𝑐 ∈ ℝ.
Diketahui 𝜌(0) = 𝜌0 maka penyelesaian pada Contoh 1 adalah 𝜌 = 𝜌0.
Contoh 2
𝜕𝜌
𝜕𝑡 = −𝜌 + 2𝑒𝑡.
Persamaan tersebut dapat diselesaikan dengan variabel terpisah 𝜕𝜌
𝜕𝑡 + 𝜌 = 2𝑒𝑡. Faktor integralnya 𝜇(𝑡) = 𝑒∫ 𝑑𝑡 = 𝑒𝑡.
Persamaan tersebut dikali dengan 𝑒𝑡 menjadi 𝑒𝑡𝜕𝜌 𝜕𝑡 + 𝑒𝑡𝜌 = 2𝑒2𝑡, 𝜕 𝜕𝑡(𝑒𝑡𝜌) = 2𝑒2𝑡, ∫ 𝜕(𝑒𝑡𝜌) = 2 ∫ 𝑒2𝑡𝜕𝑡, 𝑒𝑡𝜌 = 𝑒2𝑡+ 𝑐, 𝜌 = 𝑒𝑡+ 𝑐𝑒−𝑡. Diketahui 𝜌(0) = 𝜌0 maka 𝑒0+ 𝑐𝑒0 = 𝜌 0, 1 + 𝑐 = 𝜌0, 𝑐 = 𝜌0 − 1. Penyelesaian pada Contoh 2 adalah
𝜌 = 𝑒𝑡+ (𝜌
0− 1)𝑒−𝑡.
Contoh 3
𝜕𝜌
𝜕𝑡 = −𝑥𝜌.
Karena 𝜌 adalah fungsi yang bergantung pada 𝑥 dan 𝑡 maka persamaan diferensial parsial tersebut dapat diselesaikan dengan metode variabel terpisah yaitu
𝜕𝜌 𝜌 = −𝑥 𝜕𝑡, ∫𝜕𝜌 𝜌 = ∫ −𝑥 𝜕𝑡, ln|𝜌| = −𝑥𝑡 + 𝑐, 𝑒ln|𝜌|= 𝑒−𝑥𝑡+𝑐, 𝑒ln|𝜌| = 𝑒−𝑥𝑡𝑒𝑐. Dimisalkan 𝑒𝑐 = 𝑐 3 maka 𝑒ln|𝜌| = 𝑐 3𝑒−𝑥𝑡, 𝜌 = 𝑐3𝑒−𝑥𝑡.
Untuk nilai 𝑥 konstan yang lain mungkin bervariasi, oleh karena itu penyelesaian persamaan diferensial parsial tersebut adalah
𝜌(𝑥, 𝑡) = 𝑐3(𝑥)𝑒−𝑥𝑡. Diketahui kondisi awal 𝜌(𝑥, 0) = 𝑓(𝑥) berarti
𝑐3(𝑥)𝑒0 = 𝑓(𝑥), 𝑐3(𝑥) = 𝑓(𝑥). Jadi, didapat penyelesaiannya yaitu
𝜌(𝑥, 𝑡) = 𝑓(𝑥)𝑒−𝑥𝑡.
Misalkan diketahui nilai awal dari kepadatan lalu lintas konstan yang tidak bergantung pada variabel 𝑥 yaitu
𝜌(𝑥, 0) = 𝜌0.
Dengan kata lain, kepadatan lalu lintas tetap konstan karena semua kendaraan
bergerak dengan kecepatan yang sama. Akibatnya, nilai akhir kepadatan lalu lintas
akan tetap konstan seperti nilai awalnya
𝜌(𝑥, 𝑡) = 𝜌0.
Kepadatan lalu lintas yang konstan tersebut merupakan kepadatan di titik
ekuilibrium. Jika kepadatan lalu lintas relatif konstan, persamaan diferensial
tersebut dapat diselesaikan dengan perturbasi atau usikan, misalkan
𝜌(𝑥, 𝑡) = 𝜌0+ 𝜀𝜌1(𝑥, 𝑡), (3.3.4) dengan 𝜀 adalah konstan yang cukup kecil dan |𝜀𝜌1| ≪ 𝜌0 yang disebut perturbasi kepadatan lalu lintas.
Asumsikan nilai awal kepadatan lalu lintas adalah fungsi terhadap 𝑥 diketahui dan mendekati konstan 𝜌0, sehingga
𝜌(𝑥, 0) = 𝜌0+ 𝜀𝑓(𝑥). (3.3.5) Persamaan (3.3.5) juga merupakan perturbasi kepadatan lalu lintas yang nilai
awalnya diketahui yaitu 𝜌(𝑥, 0) = 𝑓(𝑥) sehingga persamaan (3.3.4) dapat disubstitusikan ke dalam persamaan (3.3.3) menjadi
𝜕 𝜕𝑡(𝜌0+ 𝜀𝜌1) + 𝑑𝑞 𝑑𝜌(𝜌0+ 𝜀𝜌1) 𝜕 𝜕𝑥(𝜌0+ 𝜀𝜌1) = 0, 𝜀𝜕𝜌1 𝜕𝑡 + 𝑑𝑞 𝑑𝜌(𝜌0+ 𝜀𝜌1)𝜀 𝜕𝜌1 𝜕𝑥 = 0, 𝜕𝜌1 𝜕𝑡 + 𝑑𝑞 𝑑𝜌(𝜌0+ 𝜀𝜌1) 𝜕𝜌1 𝜕𝑥 = 0. (3.3.6)
𝑑𝑞 𝑑𝜌(𝜌0+ 𝜀𝜌1) = 𝑑𝑞 𝑑𝜌(𝜌0) + 𝜀𝜌1 𝑑2𝑞 𝑑𝜌2(𝜌0) + (𝜀𝜌1)2 2! 𝑑3𝑞 𝑑𝜌3(𝜌0) + (𝜀𝜌1)3 2! 𝑑4𝑞 𝑑𝜌4(𝜌0) + ⋯.
Order tingkat tinggi dalam ekspansi deret Taylor diabaikan. Oleh karena itu,
didapat
𝑑𝑞
𝑑𝜌(𝜌0+ 𝜀𝜌1) = 𝑑𝑞 𝑑𝜌(𝜌0). Dari ekspansi deret Taylor maka persamaan (3.3.6) menjadi
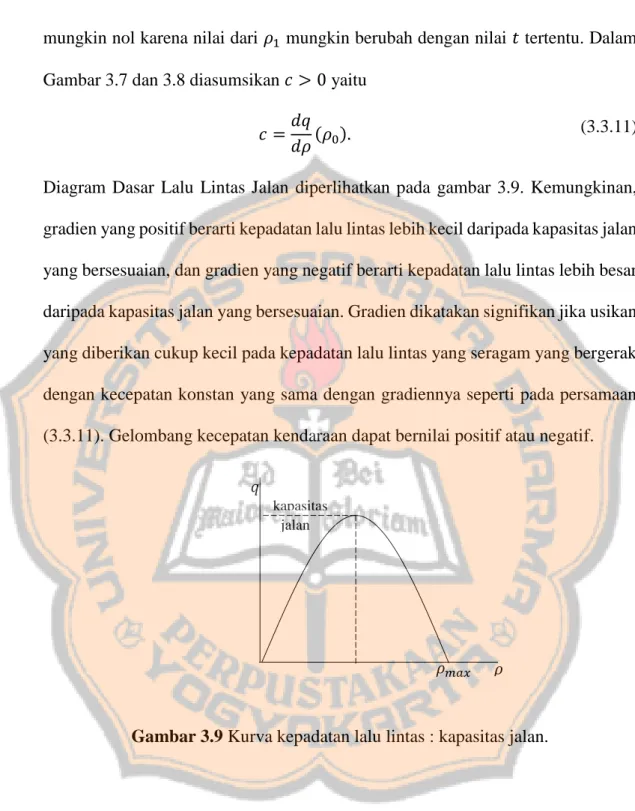
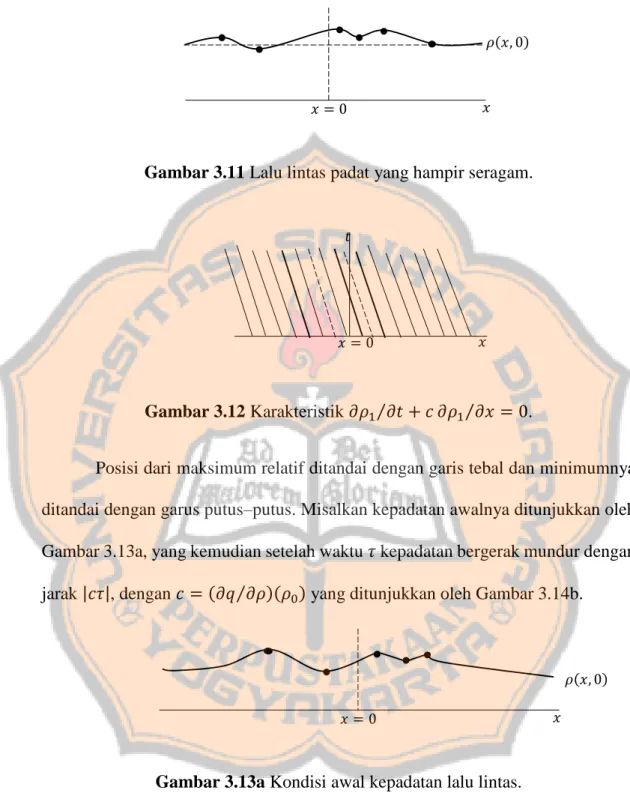
𝜕𝜌1 𝜕𝑡 + 𝑑𝑞 𝑑𝜌(𝜌0) 𝜕𝜌1 𝜕𝑥 = 0, (3.3.7) atau 𝜕𝜌1 𝜕𝑡 + 𝑐 𝜕𝜌1 𝜕𝑥 = 0 (3.3.8) dengan 𝑐 = 𝑑𝑞 𝑑𝜌⁄ (𝜌0).
Selanjutnya, kita akan menyelesaikan persamaan (3.3.8) yang terkait dengan
linearisasi masalah lalu lintas. Kondisi awal kepadatan lalu lintas adalah usikan
awal kepadatan lalu lintas yang diketahui
𝜌1(𝑥, 0) = 𝑓(𝑥).
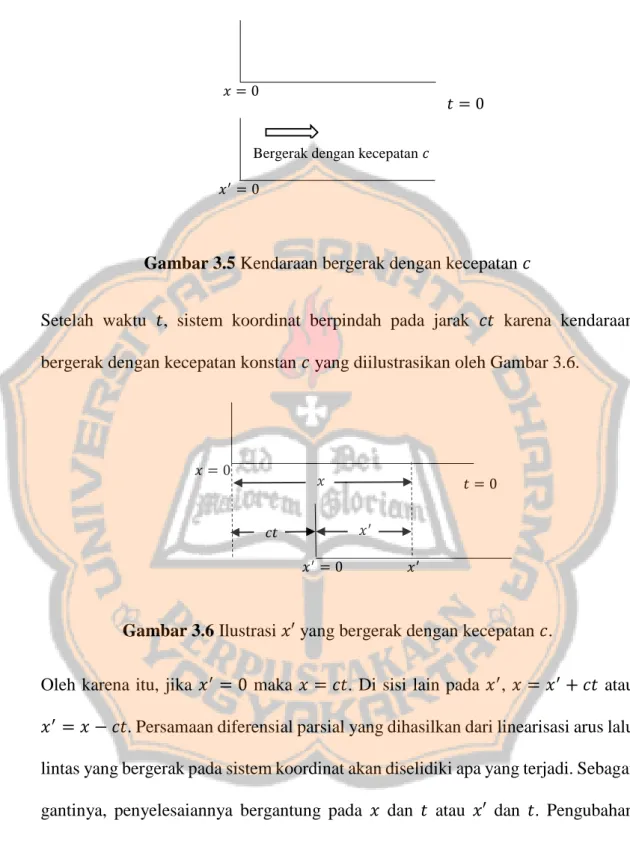
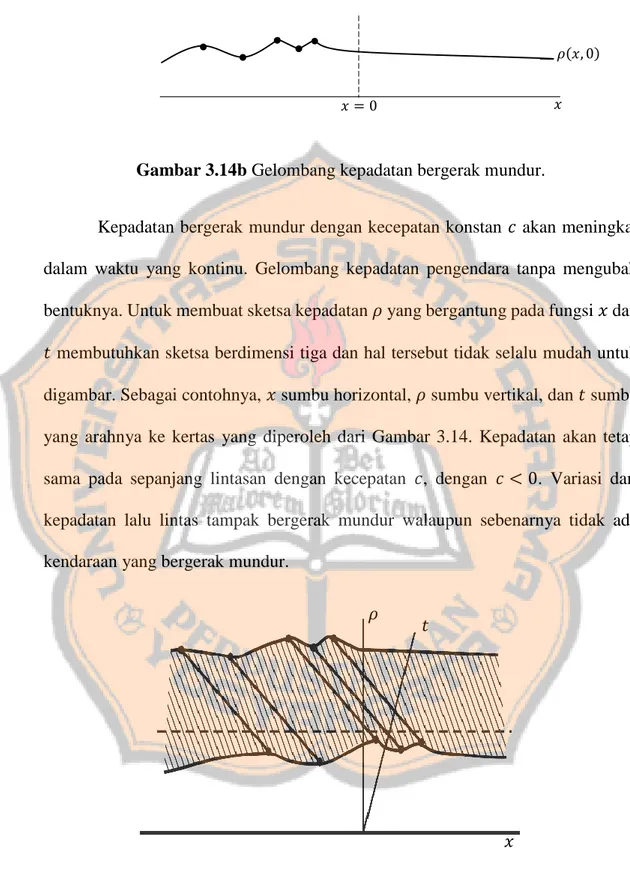
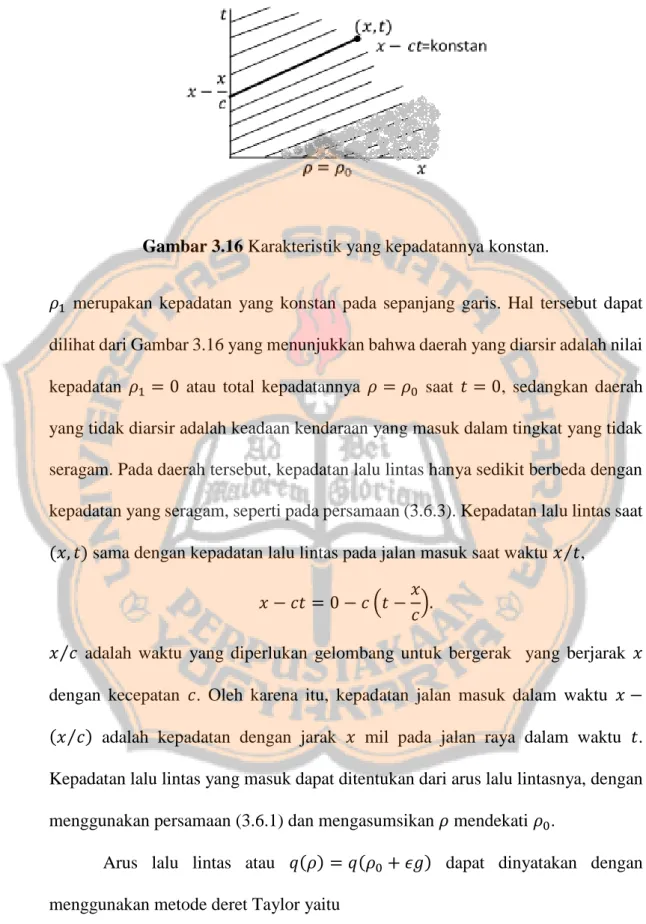
Didefinisikan koordinat ruang lain yaitu 𝑥′ yang bergerak dengan kecepatan konstan 𝑐. Diasumsikan dua sistem koordinat 𝑥 dan 𝑥′ yang asalnya sama di 𝑡 = 0 (lihat Gambar 3.5)
Gambar 3.5 Kendaraan bergerak dengan kecepatan 𝑐
Setelah waktu 𝑡, sistem koordinat berpindah pada jarak 𝑐𝑡 karena kendaraan bergerak dengan kecepatan konstan 𝑐 yang diilustrasikan oleh Gambar 3.6.
Gambar 3.6 Ilustrasi 𝑥′ yang bergerak dengan kecepatan 𝑐.
Oleh karena itu, jika 𝑥′= 0 maka 𝑥 = 𝑐𝑡. Di sisi lain pada 𝑥′, 𝑥 = 𝑥′+ 𝑐𝑡 atau 𝑥′ = 𝑥 − 𝑐𝑡. Persamaan diferensial parsial yang dihasilkan dari linearisasi arus lalu lintas yang bergerak pada sistem koordinat akan diselidiki apa yang terjadi. Sebagai
gantinya, penyelesaiannya bergantung pada 𝑥 dan 𝑡 atau 𝑥′ dan 𝑡. Pengubahan variabel yang melibatkan turunan parsial dilakukan untuk memudahkan dalam
menjelaskan perbedaan notasi setiap variabel yang digunakan. Variabel 𝑥′ dan 𝑡′
Bergerak dengan kecepatan 𝑐 𝑐 𝑥 = 0 𝑥′= 0 𝑡 = 0 𝑥 = 0 𝑥′= 0 𝑡 = 0 𝑥 𝑐𝑡 𝑥′ 𝑥′
dengan 𝑡′ = 𝑡 digunakan untuk bergeraknya sistem koordinat. Akibatnya, pengubahan variabel yang digunakan adalah
𝑥′ = 𝑥 − 𝑐𝑡, 𝑡′= 𝑡.
Aturan rantai turunan parsial dilakukan untuk menyatakan persamaan
diferensial parsial dalam bentuk variabel baru yaitu 𝜕 𝜕𝑥= 𝜕 𝜕𝑥′ 𝜕𝑥′ 𝜕𝑥 + 𝜕 𝜕𝑡′ 𝜕𝑡′ 𝜕𝑥, 𝜕 𝜕𝑥= 𝜕 𝜕𝑥′1 + 𝜕 𝜕𝑡′0, 𝜕 𝜕𝑥= 𝜕 𝜕𝑥′. dan 𝜕 𝜕𝑡 = 𝜕 𝜕𝑥′ 𝜕𝑥′ 𝜕𝑡 + 𝜕 𝜕𝑡′ 𝜕𝑡′ 𝜕𝑡, 𝜕 𝜕𝑡 = 𝜕 𝜕𝑥′(−𝑐) + 𝜕 𝜕𝑡′1, 𝜕 𝜕𝑡 = −𝑐 𝜕 𝜕𝑥′+ 𝜕 𝜕𝑡′. Walaupun 𝑡 = 𝑡′ tetapi 𝜕 𝜕𝑡≠ 𝜕
𝜕𝑡′ karena hasil tersebut diperoleh dari definisi dua
turunan parsial. 𝜕𝑡𝜕 merupakan turunan terhadap waktu pada titik 𝑥 = 0, sedangkan 𝜕
𝜕𝑡′ merupakan turunan terhadap waktu terhadap titik 𝑥′ yang bergerak dengan
kecepatan 𝑐. Perubahan waktu mungkin berbeda pada kedua sistem tersebut. Hal itu menekankan pada pentingnya memaparkan variabel waktu yang baru 𝑡′, yang menyatakan perbedaan notasi antara titik 𝑥 dan titik 𝑥′.
Oleh karena itu, persamaan (3.3.8) pada sistem koordinat yang bergerak dengan kecepatan 𝑐 menjadi
−𝑐𝜕𝜌1 𝜕𝑥′+ 𝜕𝜌1 𝜕𝑡′ + 𝑐 𝜕𝜌1 𝜕𝑥′ = 0, 𝜕𝜌1 𝜕𝑡′ = 0.
Persamaan diferensial parsial tersebut mempunyai penyelesaian 𝜕𝜌1 = 0𝜕𝑡′,
∫ 𝜕𝜌1 = ∫ 0𝜕𝑡′, 𝜌1 = konstan.
Untuk nilai 𝑥 yang berbeda, nilai 𝜌1 juga kemungkinan tidak konstan tetapi 𝜌1 adalah fungsi terhadap 𝑥′,
𝜌1 = 𝑔(𝑥′)
dengan 𝑔(𝑥′) merupakan fungsi yang berubah–ubah terhadap 𝑥′. Variabel aslinya adalah
𝜌1 = 𝑔(𝑥 − 𝑐𝑡). (3.3.9)
Subtitusikan persamaan (3.3.9) ke persamaan (3.3.8). Dengan menggunakan aturan
rantai diperoleh 𝜕𝜌1 𝜕𝑥 = 𝑑𝑔 𝑑(𝑥 − 𝑐𝑡) 𝜕(𝑥 − 𝑐𝑡) 𝜕𝑥 , 𝜕𝜌1 𝜕𝑥 = 𝑑𝑔 𝑑(𝑥 − 𝑐𝑡), dan 𝜕𝜌1 𝜕𝑡 = 𝑑𝑔 𝑑(𝑥 − 𝑐𝑡) 𝜕(𝑥 − 𝑐𝑡) 𝜕𝑡 ,
𝜕𝜌1 𝜕𝑡 = −𝑐
𝑑𝑔 𝑑(𝑥 − 𝑐𝑡).
Sehingga terbukti bahwa persamaan (3.3.8) dipenuhi oleh persamaan (3.3.9).
Walaupun demikian, persamaan (3.3.8) melibatkan turunan parsial yang bergantung terhadap 𝑥 dan 𝑡 yang dapat diintegralkan pada sistem koordinat yang bergerak dengan kecepatan 𝑐. Penyelesaian secara umum persamaan (3.3.8) mengandung fungsi yang berubah-ubah, seperti pada Contoh 3. Penyelesaian
umumnya adalah
𝜌1(𝑥, 𝑡) = 𝑔(𝑥 − 𝑐𝑡).
Tetapi 𝜌1(𝑥, 0) = 𝑓(𝑥), sehingga 𝑓(𝑥) = 𝑔(𝑥). Akibatnya, penyelesaian dari persamaan diferensial parsial dipenuhi dengan kondisi awal
𝜌1(𝑥, 𝑡) = 𝑓(𝑥 − 𝑐𝑡),
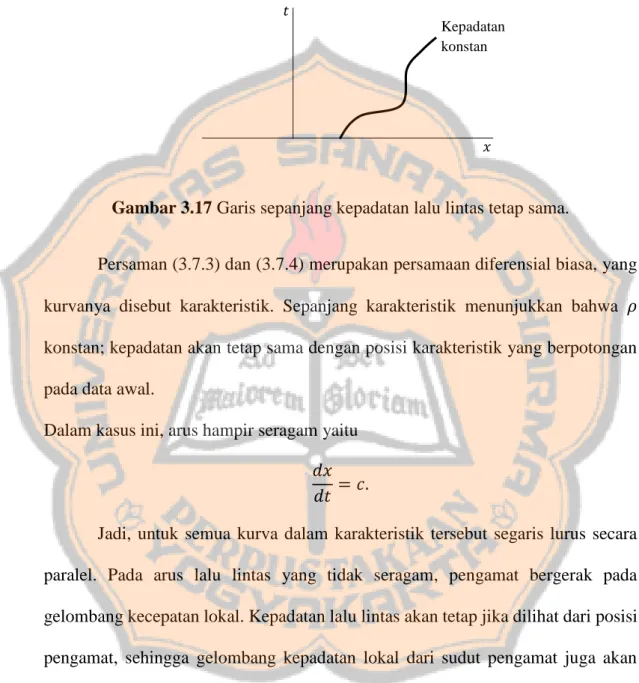
𝜌(𝑥, 𝑡) = 𝜌0+ 𝜖𝑓(𝑥 − 𝑐𝑡). (3.3.10) Jika kendaraan bergerak dengan kecepatan konstan, maka kepadatan lalu
lintas tetap sama. Kepadatan lalu lintas tersebut menyebar seperti gelombang yang
disebut gelombang kepadatan lalu lintas dengan kecepatan gelombang 𝑐. Perlu dingat bahwa kecepatan kendaraan mungkin berbeda dari kecepatan saat kendaraan tersebut bergerak. Sepanjang kurva yang 𝑥 − 𝑐𝑡 = konstan, maka kepadatan lalu lintas akan tetap sama. Garis tersebut disebut karakteristik dari persamaan
diferensial parsial
𝜕𝜌1 𝜕𝑡 + 𝑐
𝜕𝜌1 𝜕𝑥 = 0.