BAB 2
TINJAUAN PUSTAKA
2.1. Definisi Elevator
Elevator juga disebut lift merupakan alat pengangkat barang dan penumpang secara vertikal yang berbentuk sangkar (car) bergerak naik-turun mengikuti rel penuntun tetap yang dipasang pada bangunan dengan menggunakan seperangkat alat mekanik baik disertai pengendali otomatis ataupun pengendali konvensional (Rudenko, 1994). Elevator bekerja dengan bantuan saklar elektromagnet atau relay (Otis, 1993). Sistem pengendali elevator mempunyai peran penting dalam menentukan berfungsi/tidaknya kerja elevator.
2.2. Klasifikasi Elevator Berdasarkan Pemakaian
Menurut Gina (2003) klasifikasi elevator berdasarkan pemakaian adalah sebagai berikut :
1. Pemakaian umum atau perniagaan (general purpose or comercial), yaitu : tipe elevator yang digunakan pada pemakaian yang bersifat umum, contohnya : pada hotel, rumah sakit, masjid, kantor-kantor dan perusahaan.
2. Pemakaian pada tempat tinggal (residensial), yaitu : tipe elevator yang digunakan pada rumah tempat tinggal, contohnya : pada rumah tempat tinggal. 3. Pemakaian pada supermarket (store), yaitu : tipe elevator yang digunakan pada
swalayan atau pusat perbelanjaan.
2.3. Metode Pengoperasian Elevator
Metode pengoperasian elevator adalah cara kerja elevator dalam memberikan respon terhadap panggilan yang diberikan penumpang.
Metode operasi elevator secara umum dibedakan atas dua cara, yaitu pengoperasian manual dan pengoperasian otomatis.
1. Pengoperasian Manual
Pengoperasian manual merupakan sistem pengoperasian sangkar dengan kecepatan rendah dan dapat berhenti pada posisi sembarang titik yang dikehendaki, misalnya untuk kondisi perawatan (Otis, 1993). Pengoperasian elevator diatur oleh seorang operator. Semua panggilan harus dikirim ke meja operator. Kemudian operator mengatur gerakan sangkar ke posisi lantai yang diinginkan/dipesan penumpang (Otis, 1993).
2. Pengoperasian Otomatis
Pengoperasian otomatis adalah memberikan respon secara langsung kepada penumpang yang memanggil sangkar (Otis, 1993).
Berdasarkan prinsip kerjanya, metode ini dibedakan lagi atas dua yaitu Metode Single Automatic Push Button dan Metode Selective-Collective.
a. Metode Single Automatic Push Button
Metode single automatic push button pada setiap lantai hanya terdapat satu buah tombol untuk memanggil sangkar. Di dalam sangkar terdapat tombol tujuan lantai yang diinginkan. Selama elevator bekerja, elevator tidak melayani panggilan dari penumpang lain (Otis, 1993). Elevator memberikan tanggapan setelah elevator selesai melaksanakan tugasnya (Otis, 1993).
b. Metode Selective–Collective
lantai terendah dan tertinggi yang masing-masing hanya terdapat satu tombol panggilan (Otis, 1993). Di dalam sangkar terdapat tombol tujuan lantai yang diinginkan penumpang.
c. Metode Duplex-Collective
Metode duplex–collective ini pada prinsipnya hampir sama dengan metode
selective-collective merupakan operasi gabungan dari dua atau lebih elevator yang bekerja secara selective-collective (Otis, 1993).
Metode ini pada setiap lantai terdapat tombol bersama untuk memanggil sangkar. Apabila tombol panggilan ditekan maka sangkar dengan posisi paling dekat dan dengan arah yang sesuai dengan panggilan, akan melayani panggilan (Otis, 1993). Tombol tujuan lantai terdapat pada setiap sangkar yang berfungsi untuk mengoperasikan sangkarnya masing-masing.
Uraian diatas maka dapat dipilih metode pengoperasian otomatis dengan prinsip berdasarkan metode selective–collective untuk perancangan ini, karena di dalam gedung hanya terdapat satu elevator.
2.4. Ruang Peletakan Mesin
Ruang peletakan mesin utama elevator terdiri dari dua tipe sistem peletakannya, yaitu Penthoese Machine Room Type dan Basement Machine Room Type.
1. Penthouse Machine Room Type
Mesin elevator ditempatkan pada bagian atas sangkar (Lubomir, 1997). 2. Basement Machine Room Type
2.5. Penggerak Elevator Sistem Wrap
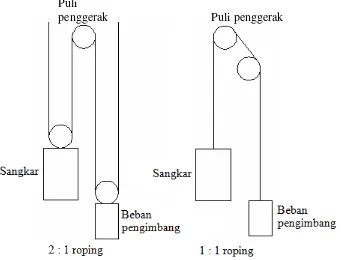
Penggerak elevatorsistem wrap adalah motor AC (Lubomir, 1997). Motor dikopel ke poros mesin elevator (elevator driving machine), yaitu suatu alat yang menggerakkan puli penggerak. Selanjutnya puli penggerak menarik dan mengulur tali yang diikat pada sangkar dan beban pengimbang (counterweight) (Rudenko, 1994). Sangkar dan beban pengimbang bergerak naik-turun sesuai dengan putaran puli penggerak seperti terlihat pada Gambar 2.1.
Puli
penggerak Puli penggerak
Gambar 2.1. Pemasangan Tali Baja pada Sistem Wrap
2.6. Komponen Utama pada Luar Atas Sangkar (Phenthouse Machine Room)
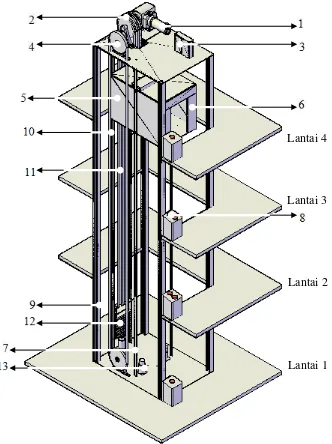
Komponen utama pada luar atas sangkar tipe phenthouse machine room
diletakkan pada bagian lantai paling atas elevator seperti terlihat pada Gambar 2.2. Elevator menggunakan mesin pengangkat jenis roda puli penggerak dan drum penggulung (Rudenko, 1994).
(Rudenko, 1994). Dalam hal ini, kelonggaran bagian tali yang keluar dari puli akan menyebabkan tergelincirnya roda puli sehingga tali akan mengencang kembali. Bila sangkar yang digerakkan mesin mengangkat muatan jenis drum terhenti akan terjadi kerusakan serius karena drum terus berputar dan tali tanpa tegangan terus diulur (Rudenko, 1994).
Lantai 4
Lantai 3
Lantai 2
Lantai 1
Keterangan Gambar :
1. Motor AC 8. Tombol pemanggilan 2. Puli penggerak 9. Kerangka elevator
3. Panel kontrol 10. Rel Penuntun beban pengimbang 4. Pengatur kecepatan 11. Tali baja
5. Sangkar 12. Beban pengimbang
6. Pintu sangkar 13. Peredam (buffer) 7. Rel penuntun sangkar
Komponen utama elevator yang ditempatkan pada bagian atas sangkar antara lain motor AC dan puli penggerak.
1. Motor AC
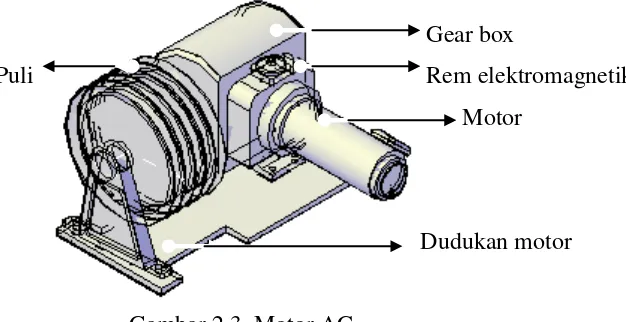
Motor AC menggunakan mesin pengangkat jenis roda puli penggerak dan drum (Rudenko, 1994). Perancangan dengan roda puli, penggerak tali melewati roda puli yang digerakkan oleh gaya gesek seperti terlihat pada Gambar 2.3. Perancangan dengan drum, tali yang menahan sangkar diikatkan pada drum dan dililitkan pada permukaannya (Rudenko, 1994).
Gear box
Puli Rem elektromagnetik
Motor
Dudukan motor
Gambar 2.3. Motor AC 2. Puli Penggerak (Traction Sheave)
terbuat dari besi cor atau besi tuang (Rudenko, 1994). Diameter puli penggerak tergantung pada diameter tali baja. Umur puli penggerak yang diinginkan merupakan dasar untuk mendapatkan nilai aman tekanan satuan antara tali baja dan alur (groove) puli penggerak (Rudenko, 1994). Jenis alur puli seperti terlihat pada Gambar 2.4.
(a) (b)
Gambar 2.4. Jenis Alur Puli : (a) Jenis Alur Round Groove,
(b) Jenis Alur Undercut Groove
2.7. Komponen pada Terowongan (Hoist Way)
Komponen pada terowongan (hoist way) adalah sebagai berikut : 1. Sangkar (Car)
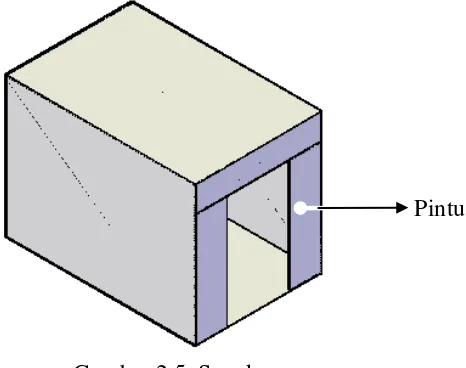
Sangkar (car)adalah suatu kerangka kendaraan yang mempunyai ruangan tempat penumpang atau barang yang akan dipindahkan (Rudenko, 1994). Sangkar ini tertutup dan dilengkapi dengan pintu seperti terlihat pada Gambar 2.5.
Pintu
Sangkar ini juga harus kokoh, ringan dan desainnya sederhana (Rudenko, 1994). Bagian dalam sangkar terdapat tombol-tombol pengatur arah tujuan lantai, buka dan tutup pintu (Lubomir, 1997). Tata letak peralatan dan tombol operasi elevatorsebagaimana dapat dilihat pada Gambar 2.6.
(a) (b)
Gambar 2.6. (a) Tombol Pemanggilan Lantai (b) Tombol Tujuan Lantai, Buka Pintu (Open Door) dan Tutup Pintu (Close Door)
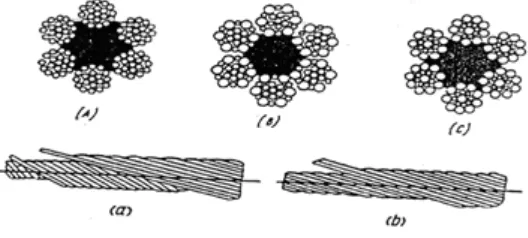
2. Tali Baja (Stell Wire Rope)
Gambar 2.7. Lapisan Serat Tali Baja
Gambar 2.8. Konstruksi Serat Tali Baja
Tali baja sangat dominan dipergunakan untuk pengoperasian elevator, karena mempunyai beberapa keunggulan yaitu:
• Lebih ringan.
• Lebih tahan terhadap sentakan.
• Operasi yang tenang walaupun pada kecepatan tinggi.
• Kerusakan awal lebih mudah diketahui.
Pembuatan tali baja dilakukan dengan proses pengerjaan panas sekaligus diiringi dengan penarikan dingin yang akan meningkatkan sifat mekanis kawat (Zainuri, 2006). Tali baja terbuat dari baja dengan kekuatan
σ
b = (130 s/d 200) kg/mm2 (Zainuri, 2006).3. Beban Pengimbang(Counterweight)
berlawanan arah dengan sangkar seperti terlihat pada Gambar 2.9. Beban pengimbang terdiri dari satu kerangka baja dengan perancangan yang berlapis untuk memudahkan pengaturan beban dan penyederhanaan perakitan (Lubomir, 1997). Beban pengimbang biasanya terpasang disamping elevator. Penggunaan beban pengimbang menghemat konsumsi daya yang diperlukan elevator.
m2 Beban pengimbang
Batang besi cor
m1 Sangkar kelabu
(a) (b)
Gambar 2.9. (a) Arah Gerakan Beban Pengimbang, (b) Konstruksi Beban Pengimbang
4. Rel Penuntun
Rel penuntun terbuat dari batang baja canai profil T seperti terlihat pada Gambar 2.10. dan diikat pada kedua sisi lorong elevator yang berlawanan (Rudenko, 1994). Sangkar bergerak di dalam lorong pada rel penuntun.
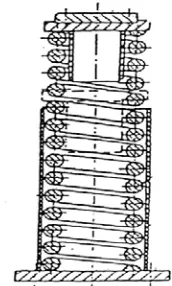
5. Peredam
Peredam adalah suatu alat yang ditempatkan pada bagian dasar terowongan (Lubomir, 1997). Peredam berfungsi untuk meredam kejutan apabila suatu saat tali pengikat elevator dengan beban pengimbang putus (Lubomir, 1997). Peredam bekerja berdasarkan hidrolik yang dibantu dengan pegas seperti terlihat pada Gambar 2.11.
Gambar 2.11. Peredam 2.8. Mikrokontroler ATmega 8535
Mikrokontroler ATmega8535 dibuat menggunakan teknologi memori tidak hilang meskipun tanpa catu daya (nonvolatile) berdensitas tinggi (Winoto, 2010). On-Chip ISP (In System Programming) Flash yang terdapat di dalamnya memungkinkan memori program dapat diprogram ulang secara In-System melalui perangkat antarmuka serial ISP, baik oleh pemrogram memori nonvolatil konvensional, ataupun program On-chip Boot yang terdapat pada inti AVR (Data Sheet Mikrokontroler ATmega 8535). Program boot tersebut dapat menggunakan sembarang perangkat antarmuka untuk mengunduh program aplikasi dalam memori aplikasi Flash (Heryanto, 2008). Piranti lunak pada bagian Boot Flash
akan tetap berjalan sementara bagian aplikasi Flash dimutakhirkan. Sehingga menghasilkan operasi Baca-Perulangan-Tulis (Read-While-Write) yang tepat (Data Sheet Mikrokontroler ATmega 8535).
Membuat perbandingan di antara ragam mikrokontroler, bukanlah pekerjaan yang mudah karena banyak parameter yang perlu dipertimbangkan. Salah satu cara praktis yang dapat dilakukan adalah dengan mengambil salah satu paramater, misalkan kecepatan pemrosesannya. Pada Tabel 2.1. menunjukkan perbandingan kecepatan prosesor dan efisiensi eksekusi dari beberapa mikrokontroler populer.
Tabel 2.1. Perbandingan Kecepatan Mikrokontroler pada Beberapa Merek Mikrokontroler Produsen Ukuran Kode
Terkompilasi
Sumber : Data Sheet Mikrokontroler
bermacam-macam aplikasi (embedded system). Kemasan mikrokontroler ATmega 8535 dapat dilihat pada Gambar 2.12.
Kaki/pin (Input/Output)
Gambar 2.12. Kemasan Mikrokontroler ATmega 8535 2.8.1. Konfigurasi Pin Mikrokontroler ATmega 8535
Konfigurasi pin mikrokontroler ATmega 8535 pada kemasan PDIP (Plastic Dual Inline Package) sebagaimana terlihat pada Gambar 2.13.
Tabel 2.2. Deskripsi Pin Mikrokontroler ATmega 8535
Nama Deskripsi
Vcc Tegangan catu digital Gnd Catu daya negatip (Ground)
Port A (PA0-PA7) Port A berfungsi sebagai port Input/Output. Port A juga berfungsi sebagai ADC, jika diperlukan. Pin pada Port dapat diatur untuk memberikan internal pull-up resistors
pada tiap bit. Penyangga data (buffer) pada keluaran Port A mempunyai karakteristik gerak simetris dengan kapabilitas high sink maupun source. Ketika pin PA0 – PA7 digunakan sebagai input dan secara eksternal dikonfigurasi pulled-low, pin-pin tersebut menghasilkan arus apabila internal pull-up resistors diaktifkan. Pin pada Port A berada dalam kondisi tri-stated ketika kondisi reset diaktifkan, meskipun clock tidak bekerja.
Port B (PB0-PB7) Port B adalah port Input/Output dwi-arah 8-bit dengan
internal pull-up resistors pada tiap bit. Penyangga data pada output Port B mempunyai karakteristik gerak simetris dengan kapabilitas high sink maupun source. Sebagai
input, Port B yang secara eksternal dikonfigurasi pulled-low akan menghasilkan arus jika pull-up resistors
diaktifkan. Pin pada Port B berada dalam kondisi tri-stated
ketika kondisi reset diaktifkan, meskipun clock tidak bekerja. Port B juga memiliki fungsi lain yaitu TO, XCK, T1, AIN0, INT2, AIN1, SS, MOSI, MISO dan SCK. Port C (PC0-PC7) Port C adalah sebuah port Input/Output dwi-arah 8-bit
dengan internal pull-up resistors pada tiap bit. Penyanga data pada output Port C mempunyai karakteristik gerak simetris dengan kapabilitas high sink maupun source. Sebagai input, Port C yang secara eksternal dikonfigurasi
pulled-low akan menghasilkan arus jika pull-up resistors
diaktifkan. Pin pada Port C berada dalam kondisi tri-stated
ketika kondisi reset diaktifkan, meskipun clock tidak bekerja. Port C juga memiliki fungsi lain seperti TOSC2 dan TOSC1.
Port D (PD0-PD7) Port D adalah sebuah port Input/Output dwi-arah 8-bit dengan internal pull-up resistors pada tiap bit. Penyangga data pada output Port D mempunyai karakteristik gerak simetris dengan kapabilitas high sink maupun source. Sebagai input, Port D yang secara eksternal dikonfigurasi
Nama Deskripsi
, TXD, INT0, INT1, OC1B, OC1A, ICP1, OC2, SCL dan SDA.
RESET Input Reset. Kondisi low-level pada pin ini yang lebih lama dibanding panjang pulsa minimum akan menyebabkan kondisi reset, meskipun clock tidak bekerja. Pulsa yang lebih pendek tidak dijamin menyebabkan kondisi reset.
XTAL1 Pin untuk eksternal clock. XTAL2 Pin untuk eksternal clock.
AVCC Pin tegangan catu untuk Port A dan ADC. AVcc harus terhubung secara eksternal dengan Vcc, meskipun ADC tidak digunakan. Jika ADC digunakan, AVcc harus terhubung dengan Vcc melalui sebuah low-pass filter. AREF Pin referensi analog bagi ADC
Sumber : Data Sheet Mikrokontroler ATmega 8535 Keterangan tabel : - ADC (Analog to Digital Converter)
2.8.2. Central Processing Unit (CPU)
Central Processing Unit (CPU) fungsi utamanya adalah memastikan eksekusi program dilakukan dengan tepat (Data Sheet mikrokontroler ATmega 8535). CPU bertugas mengakses memori, melakukan perhitungan, mengontrol periferal, dan menangani interupsi.
2.8.3. Memori (Memory)
Memori mikrokontroler ATmega 8535 memiliki On-chip In-System Reprogrammable Flash sebesar 8 KByte bagi penyimpanan program (Heryanto, 2008). Karena seluruh instruksi AVR memiliki lebar 16 atau 32-bit, Flash
$000
$FFF Gambar 2.14. Peta Memori Program 2.8.4. Port Masukan/Keluaran (Input/Output Port)
Port masukan/keluaran (Input/Output Port) AVR memiliki fungsionalitas Baca-Mengubah-Tulis (Read-Modify-Write) saat digunakan sebagai port
Input/Output (Data Sheet mikrokontroler ATmega 8535). Hal ini berarti bahwa arah dari satu pin port dapat diubah tanpa perlu mengubah arah dari pin yang lain dengan instruksi. Hal yang sama diterapkan ketika mengubah nilai gerak (jika dikonfigurasi sebagai Input) atau enabel/disabel resistor pull-up (jika dikonfigurasi sebagai masukan Output).
Tiap-tiap Output memiliki karakteristik gerak simetris dengan kapabilitas
sink dan source yang tinggi. Penggerak pin cukup kuat untuk menggerakkan display LED (Light Emitting Diode) secara langsung. Seluruh pin port memiliki resistor pull-up terpilih secara individual dengan resistansi tetap tegangan-catu. Semua pin Input/Output memiliki dioda proteksi pada Vcc dan Ground seperti terlihat pada Gambar 2.15.
Gambar 2.15. Konfigurasi Internal Pin Port
Semua referensi register dan bit dalam bagian ini dituliskan dalam bentuk umum. Huruf kecil “x” mewakili huruf penomoran bagi port, dan huruf kecil “n” mewakili nomor bit (Data Sheet mikrokontroler ATmega 8535). Namun sewaktu menggunakan definisi register atau bit dalam program, bentuk yang tepat harus digunakan. PORT B 3 bagi bit no. 3 dalam Port B, di sini didokumentasikan secara umum sebagai PORTxn.
Tiga lokasi alamat memori Input/Output dialokasikan bagi tiap port. Masing-masingnya bagi Data Register (PORTx), Data Direction Register
(DDRx), dan Port Input Pin (PINx) (Data Sheet mikrokontroler ATmega 8535). Lokasi Input/Output Port Input Pin hanya bisa dibaca, sementara Data Register dan data yang keluar (Data Direction Register) dapat dibaca/tulis. Sebagai tambahan, bit Pull-up Disable (PUD) dalam SFIOR mendisabel fungsi pull-up
Register Port C
melayani instruksi-instruksi pada interupsi. Kemudian kembali mengerjakan instruksi program utama setelah instruksi-instruksi pada instruksi selesai dikerjakan.
Mikrokontroler ATmega 8535 memiliki 3 interupsi eksternal, yaitu INT0, INT1 dan INT2 sebagaimana tertera pada Tabel 2.3. Interupsi eksternal bisa dilakukan dengan memberikan logika 1 pada pin interupsi yang bersangkutan.
Tabel 2.3. Hubungan PIN dan Interupsi
Jenis Interupsi PIN
INT0 PORT D 2
INT1 PORT D 3
INT2 PORT B 2
Sumber : Heryanto (2008)
Terdapat dua register yang mengatur kondisi dan cara pengangtifan interupsi, yaitu register MCUCR (Mikro Control Unit Control Register) dan GICR (General Interrupt Control Register) seperti terlihat pada Tabel.2.4. dan 2.5.
Tabel 2.4. Register MCUCR untuk Pengaturan Tipe Interupsi Eksternal
Tabel 2.5. Register GICR untuk Mengatur Interupsi Eksternal
Interupsi Eksternal ini memberikan cara membangkitkan interupsi melalui piranti lunak. Interupsi Eksternal dipicu oleh pin INT0, INT1, dan INT2 (Winoto, 2010). Jika difungsikan, interupsi akan terpicu meskipun pin INT0-2 diatur sebagai output. Interupsi Eksternal dapat dipicu pada tepi naik, tepi turun atau
level rendah (INT0/INT1), atau hanya pada tepi naik atau turun saja (INT2) (Data Sheet mikrokontroler ATmega 8535). Pengaturan hal-hal tadi dilakukan pada MCUCR.
SM2 SE SM1 SM0 ISC11 ISC10 ISC01 ISC00 MCUCR
Bit 7 6 5 4 3 2 1 0
INT1 INT0 INT2 - - - IVSEL IVCE GICR
Interupsi eksternal 1 diaktifkan oleh pin eksternal INT1 apabila bit-1 pada Status Register (SREG) dan interupsi pada GICR diset. Level dan tepi pada pin INT1 yang mengaktifkan interupsi didefinisikan di dalam Tabel 2.6. Nilai pada pin INT1 disampel sebelum mendeteksi tepi. Jika interupsi tepi yang terpilih, pulsa yang berakhir lebih lama daripada perioda 1 clock akan membangkitkan interupsi. Pulsa yang lebih pendek tidak dijamin mampu membangkitkan interupsi (Data Sheet mikrokontroler ATmega 8535). Jika interupsi level rendah dipilih,
level rendah harus ditahan hingga selesainya instruksi pengeksekusian yang sedang berjalan membangkitkan interupsi.
Tabel 2.6. Logika 0 dan 1
ISC11 ISC10 Deskripsi
0 0 Kondisi lowlevel pada INT1 membangkitkan permintaan interupsi
0 1 Kondisi berubahnya logika pada INT1 membangkitkan permintaan interupsi
1 0 Tepi turun INT1 membangkitkan permintaan interupsi 1 1 Tepi naik INT1 membangkitkan permintaan interupsi Sumber : Data Sheet Mikrokontroler ATmega 8535
2.9. Bahasa Pemrograman C
2.9.1. Karakteristik Bahasa Pemrograman C
C dapat diterapkan pada banyak komputer karena sifatnya yang tidak bergantung pada satu arsitektur mesin (Dennis, 1978). Dengan sedikit penanganan, menuliskan program yang bersifat portabel menjadi mudah. Program dapat berjalan tanpa melakukan pengubahan apapun pada kode sumber asal. Kompilator juga dapat memberi peringatan pada banyak jenis galat (Dennis, 1978).
2.9.2. Sistem Bilangan
Sistem bilangan yang digunakan didalam pemrograman bahasa C adalah sebagai berikut :
1. Sistem Bilangan Desimal
Sistem bilangan desimal adalah sistem bilangan berbasis 10 yang biasa dipergunakan dalam kehidupan sehari-hari. Bilangan-bilangan dasar pembentuknya adalah 0, 1, 2, 3, 4, 5, 6, 7, 8 dan 9. Untuk menyatakan nilai yang lebih besar dari 9, digunakan kombinasi dari bilangan-bilangan dasar tersebut seperti 10, 11, 12 dan seterusnya. Bilangan desimal dinyatakan dalam suatu persamaan sebagai berikut :
D = an . 10n + an-1 . 10n-1 + an-2 . 10n-2 + …... + a1 . 101 + a0 . 100 2.1 Dimana : D = Bilangan dalam desimal
a = Bilangan dasar, 0 s.d 9
n = Indeks bilangan, dimulai dari 0 s.d n, 0 dimulai dari bagian paling kanan
2. Sistem Bilangan Biner
B = an . 2n + an-1 . 2n-1 + an-2 . 2n-2 + …... + a1 . 21 + a0 . 20 2.2 Dimana : B = Bilangan dalam biner
a = Bilangan dasar, 0 atau 1
n = Indeks bilangan, dimulai dari 0 s.d n, 0 dimulai dari bagian paling kanan
3. Sistem Bilangan Oktal
Sistem bilangan oktal adalah sistem bilangan berbasis 8 (Dennis, 1978). Meski sistem bilangan biner sangat sesuai bagi komputasi digital, namun tidak demikian bagi manusia. Bilangan tersebut sangat panjang sehingga sukar diingat. Untuk menyederhanakannya, dibentuklah sistem bilangan oktal, yang membagi bilangan biner untuk setiap 3 digit (Dennis, 1978). Bilangan dasar sistem bilangan oktal adalah 0, 1, 2, 3, 4, 5, 6 dan 7. Untuk menyatakan nilai yang lebih besar dari 7, digunakan kombinasi dari bilangan-bilangan dasarnya, seperti 10, 11, 12, dan seterusnya. Bilangan oktal dinyatakan dalam suatu persamaan sebagai berikut :
O = an . 8n + an-1 . 8n-1 + an-2 . 8n-2 + …... + a1 . 81 + a0 . 80 2.3 Dimana : O = Bilangan dalam oktal
a = Bilangan dasar, 0 s.d 7
n = indeks bilangan, dimulai dari 0 s.d n, 0 dimulai dari bagian paling kanan
4. Sistem Bilangan Heksadesimal
H = an . 16n + an-1 . 16n-1 + an-2 . 16n-2 + …... + a1 . 161 + a0 . 160 2.4 Dimana : H = Bilangan dalam heksadesimal
a = Bilangan dasar, 0 s.d F
n = Indeks bilangan, dimulai dari 0 s.d n, 0 dimulai dari bagian paling kanan
Tabel 2.7. Bilangan Desimal, Biner, Oktal dan Heksadesimal
Desimal Biner Oktal Heksadesimal
0
2.10. Komponen Elektronika
2.10.1. Saklar Elektromagnet (Relay)
Kontak NC NC Lengan
C C
Kontak NO NO Pegas Elektromagnet
Kumparan (a) (b)
Gambar 2.16. (a) Mekanik Relay, (b) Simbol Skematik Relay
2.10.2. Sensor Sentuh (Limit Switch)
Sensor sentuh (limit switch) adalah sebuah saklar atau pembatas gerakan yang digunakan untuk mendeteksi ada tidaknya sangkar di level lantai tertentu (Otis, 1993). Sensor sentuh akan aktif jika mendapatkan sentuhan dari suatu benda fisik. Rangkaian sensor sentuh umumnya menggunakan resistor pull-up ataupun
pull-down seperti terlihat pada Gambar 2.17. Rangkaian menggunakan resistor
pull-up bersifat aktif low yang berarti saklar ditekan memberi sinyal logika 0 (tidak ada tegangan), jika saklar tidak ditekan memberi sinyal logika 1 (ada tegangan). Hal ini berkebalikan dengan rangkaian menggunakan resistor pull-down yang bersifat aktif high yang berarti saklar ditekan memberi sinyal logika 1 (ada tegangan), jika saklar tidak ditekan memberi sinyal logika 0 (tidak ada tegangan) (Adi, 2010).
Gambar 2.17. Bentuk Sensor Sentuh (Limit Switch) Beserta Konfigurasi
Pada pengoperasiannya saklar pembatas untuk pengaturan kerja posisi sangkar terdapat pada tiap level lantai (Otis, 1993). Sensor sentuh juga digunakan pada operasi membuka dan menutup pintu sangkar (Otis, 1993).
2.10.3. Dioda
Dioda adalah komponen semikonduktor yang paling sederhana (Adi, 2010). Dioda terdiri atas dua elektroda yaitu anoda dan katoda seperti terlihat pada Gambar 2.18.
Anoda Katoda
+ -
Gambar 2.18. Bentuk Dioda dan Simbol Dioda Karakteristik dioda pada umumnya adalah :
a. Jika diberi bias maju, maka akan mengalirkan arus dari arah anoda ke katoda. Dioda yang sebenarnya adalah silikon yang tidak akan mengalir arus untuk tegangan bias maju di bawah 0 V. Jika tegangan yang diberikan lebih dari antara 0 hingga 0,7 volt V maka akan terjadi sedikit pertambahan arus yang mengalir pada dioda (Adi, 2010).
b. Jika diberi bias mundur dioda tidak mengalirkan arus hingga tegangan mencapai nilai tertentu yang disebut breakdown voltage (Ubd). Karakteristik tegangan dan arus dioda dapat dilihat pada Gambar 2.19.
Pada karakteristik reverse diperlihatkan adanya tegangan Ud (breakdown), dimana pada saat tegangan reverse dioda mencapai tegangan tertentu akan terjadi aliran arus yangn drastis membesar. Penggunaan dioda dalam rangkaian diantaranya adalah sebagai penyearah arus.
2.10.4. Transistor
Transistor merupakan komponen semikonduktor yang mempunyai salah satu fungsi sebagai saklar (Adi, 2010). Karena berfungsi sebagai saklar maka transistor dioperasikan pada dua buah titik kerja, dengan tujuan untuk menghasilkan dua kondisi on dan off. Rangkaian dasar sebuah transistor yang dipergunakan sebagai saklar adalah seperti terlihat pada Gambar 2.20. Pada jenis silikon transistor saturasi pada tegangan 0,7 volt, sedangkan untuk transisitor yang germanium adalah 0,3 Volt (Adi, 2010).
(a) (b)
Gambar 2.20. (a) Transistor Sebagai Saklar, (b) Analogi Transistor Sebagai Saklar 2.10.5. Resistor
Gambar 2.21. Simbol Resistor 2.10.6. Tujuh Led (Seven Segment)
Tujuh led (seven segment) adalah sebuah rangkaian yang dapat menampilkan angka-angka desimal maupun heksadesimal seperti terlihat pada Gambar 2.22 (Adi, 2010). Seven segment biasa tersusun atas 7 bagian yang setiap bagiannya merupakan LED (Light Emitting Diode) yang dapat menyala (Adi, 2010).
Led