Informasi Dokumen
- Penulis:
- Dedy Rahman
- Pengajar:
- Dr. Ing. Ir. Ikhwansyah Isranuri
- Ir. Syahrul Abda, M.Sc.
- Sekolah: Universitas Sumatera Utara
- Mata Pelajaran: Teknik Mesin
- Topik: Perancangan Elevator dan Pembuatan Prototipe Pengendali Otomatis Elevator Berbasis Mikrokontroler ATmega 8535
- Tipe: Skripsi
- Tahun: 2012
- Kota: Medan
Ringkasan Dokumen
I. PENDAHULUAN
Bagian ini memberikan latar belakang mengenai pentingnya perancangan elevator yang efisien dan otomatis. Penelitian ini bertujuan untuk mengembangkan prototipe pengendali otomatis elevator menggunakan mikrokontroler ATmega 8535. Dalam konteks pendidikan, pemahaman tentang sistem kontrol otomatis sangat penting bagi mahasiswa teknik mesin. Hal ini tidak hanya memperkenalkan mereka kepada teknologi terkini, tetapi juga mengasah keterampilan praktis dalam merancang dan mengimplementasikan sistem elektronik.
1.1. Latar Belakang
Latar belakang menjelaskan kebutuhan akan sistem elevator yang efisien dalam bangunan bertingkat. Elevator yang dirancang harus mampu mengatasi masalah mobilitas yang dihadapi penghuni gedung. Penelitian ini relevan dengan tujuan pendidikan yang menekankan pada penerapan teori dalam praktik, serta mempersiapkan mahasiswa untuk tantangan di industri teknik.
1.2. Pendefinisian Judul
Pendefinisian judul memberikan pemahaman tentang terminologi yang digunakan dalam penelitian. Ini penting untuk membangun dasar pemahaman yang kuat bagi mahasiswa, terutama dalam konteks desain dan pembuatan prototipe. Dengan memahami istilah teknis, mahasiswa dapat lebih mudah mengikuti alur penelitian dan aplikasinya.
1.3. Perumusan Masalah
Perumusan masalah mengidentifikasi tantangan spesifik yang dihadapi dalam desain elevator otomatis. Ini membantu mahasiswa dalam memahami pentingnya analisis masalah sebagai langkah awal dalam proses rekayasa. Keterampilan ini sangat berguna dalam dunia profesional, di mana kemampuan untuk mengidentifikasi dan merumuskan masalah adalah kunci keberhasilan.
1.4. Batasan Masalah
Batasan masalah memberikan fokus pada aspek-aspek tertentu dari penelitian yang akan ditangani. Hal ini penting untuk menghindari penyimpangan dari tujuan utama penelitian. Dalam konteks pendidikan, mahasiswa belajar untuk menetapkan batasan yang realistis dan terukur dalam proyek mereka, yang merupakan keterampilan penting dalam manajemen proyek.
1.5. Tujuan Perancangan
Tujuan perancangan menekankan pentingnya menciptakan sistem elevator yang aman dan efisien. Ini mengajarkan mahasiswa tentang pentingnya tujuan yang jelas dalam setiap proyek teknik. Pemahaman ini akan membantu mereka dalam merancang solusi yang tidak hanya memenuhi spesifikasi teknis tetapi juga mempertimbangkan keselamatan pengguna.
1.6. Metode Perancangan
Metode perancangan menjelaskan langkah-langkah yang diambil dalam proses desain. Ini mencakup penggunaan formula standar dan pemrograman untuk mengontrol sistem. Mahasiswa diajarkan untuk mengikuti metode sistematis dalam perancangan, yang meningkatkan kemampuan mereka dalam menerapkan teori ke dalam praktik.
1.7. Manfaat Penelitian
Manfaat penelitian menunjukkan kontribusi yang dapat diberikan kepada industri dan akademisi. Penelitian ini tidak hanya memberikan informasi akademis tetapi juga dapat digunakan sebagai referensi bagi kontraktor lokal. Ini mengajarkan mahasiswa tentang relevansi penelitian mereka dalam konteks yang lebih luas, serta bagaimana penelitian dapat memberikan solusi praktis.
1.8. Sistematika Penulisan
Sistematika penulisan memberikan panduan tentang struktur dokumen. Ini penting untuk membantu mahasiswa memahami bagaimana menyusun laporan penelitian dengan baik. Keterampilan ini sangat penting dalam dunia akademis dan profesional, di mana komunikasi yang jelas dan terstruktur sangat dihargai.
II. TINJAUAN PUSTAKA
Bagian ini menyajikan teori-teori dasar mengenai elevator dan komponen terkait. Tinjauan pustaka memberikan landasan teori yang diperlukan untuk memahami desain elevator otomatis. Ini penting dalam pendidikan teknik, karena mahasiswa harus memiliki pemahaman yang kuat tentang konsep dasar sebelum melanjutkan ke aplikasi praktis.
2.1. Definisi Elevator
Definisi elevator memberikan gambaran umum tentang fungsinya sebagai alat pengangkat. Memahami definisi ini penting bagi mahasiswa untuk mengenali peran elevator dalam sistem bangunan modern. Ini juga membantu mereka dalam memahami konteks aplikasi teknik dalam kehidupan sehari-hari.
2.2. Klasifikasi Elevator Berdasarkan Pemakaian
Klasifikasi elevator berdasarkan pemakaian mengidentifikasi berbagai jenis elevator yang digunakan di berbagai lingkungan. Ini penting untuk membantu mahasiswa memahami aplikasi praktis dari teknologi yang mereka pelajari. Pengetahuan ini dapat digunakan untuk merancang sistem yang lebih sesuai dengan kebutuhan spesifik pengguna.
2.3. Metode Pengoperasian Elevator
Metode pengoperasian elevator menjelaskan cara kerja sistem elevator. Mahasiswa belajar tentang perbedaan antara sistem manual dan otomatis, serta bagaimana teknologi modern meningkatkan efisiensi. Ini memberikan wawasan tentang bagaimana sistem kontrol dapat diterapkan dalam berbagai konteks.
2.4. Ruang Peletakan Mesin
Ruang peletakan mesin membahas lokasi mesin elevator dan pengaruhnya terhadap desain. Pemahaman tentang ruang peletakan mesin penting untuk mahasiswa dalam merancang sistem yang optimal. Ini mengajarkan mereka tentang pentingnya mempertimbangkan faktor-faktor lingkungan dalam desain teknik.
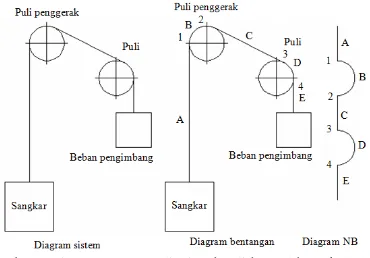
2.5. Penggerak Elevator Sistem Wrap
Penggerak elevator sistem wrap menjelaskan mekanisme penggerakan elevator. Mahasiswa belajar tentang komponen mekanis dan elektris yang terlibat. Ini memberikan pengetahuan praktis yang penting bagi mahasiswa teknik dalam memahami interaksi antara berbagai komponen dalam sistem.
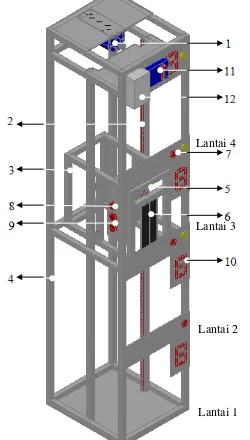
2.6. Komponen Utama pada Luar Atas Sangkar (Phenthouse Machine Room)
Komponen utama pada luar atas sangkar membahas bagian-bagian penting dari elevator. Mahasiswa diajarkan untuk mengenali dan memahami fungsi setiap komponen. Pengetahuan ini sangat penting dalam proses perancangan dan pemeliharaan sistem elevator.
2.7. Komponen pada Terowongan (Hoist Way)
Bagian ini membahas komponen yang ada di dalam terowongan elevator. Memahami komponen ini penting bagi mahasiswa untuk merancang sistem yang aman dan efisien. Ini juga membantu mereka dalam memahami integrasi sistem secara keseluruhan.
2.8. Mikrokontroler ATmega 8535
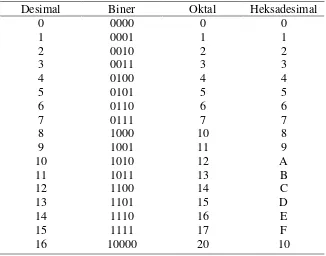
Mikrokontroler ATmega 8535 adalah komponen kunci dalam pengendali otomatis elevator. Mahasiswa belajar tentang spesifikasi dan fungsinya. Pengetahuan tentang mikrokontroler ini sangat penting dalam pengembangan sistem kontrol modern.
2.9. Bahasa Pemrograman C
Bahasa pemrograman C digunakan untuk mengembangkan perangkat lunak pengendali. Mahasiswa belajar tentang karakteristik dan penerapan bahasa C dalam sistem embedded. Ini memberikan keterampilan pemrograman yang sangat berharga dalam bidang teknik.
III. PERANCANGAN KOMPONEN UTAMA ELEVATOR
Bagian ini menjelaskan langkah-langkah dalam merancang komponen utama elevator. Proses perancangan melibatkan berbagai formula dan pertimbangan teknik. Ini memberikan pengalaman praktis bagi mahasiswa dalam menerapkan teori ke dalam desain nyata.
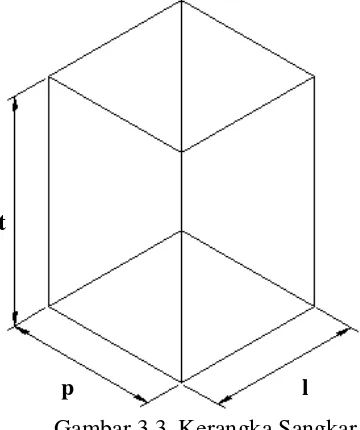
3.1. Kapasitas Elevator
Kapasitas elevator menentukan jumlah beban yang dapat diangkut. Mahasiswa belajar untuk menghitung dan merancang elevator sesuai dengan spesifikasi beban. Ini mengajarkan mereka tentang pentingnya perhitungan yang akurat dalam desain teknik.
3.2. Beban Pengimbang (Counterweight)
Beban pengimbang berfungsi untuk mengimbangi berat sangkar. Mahasiswa diajarkan tentang perancangan beban pengimbang yang efisien. Ini penting untuk memastikan kinerja elevator yang optimal dan aman.
3.3. Perancangan Tali Baja (Steel Wire Rope)
Perancangan tali baja melibatkan pemilihan bahan dan ukuran yang tepat. Mahasiswa belajar tentang sifat mekanis dan kekuatan tali baja. Pengetahuan ini penting untuk memastikan keamanan dan efisiensi sistem elevator.
3.4. Perancangan Puli
Puli merupakan komponen penting dalam sistem penggerak elevator. Mahasiswa belajar tentang desain puli dan pengaruhnya terhadap kinerja sistem. Ini mengajarkan mereka tentang interaksi antara komponen mekanis dalam sistem.
3.5. Daya Motor AC
Daya motor AC harus dirancang untuk memenuhi kebutuhan penggerakan elevator. Mahasiswa diajarkan untuk menghitung daya yang diperlukan berdasarkan beban dan kecepatan. Ini penting untuk memastikan bahwa sistem dapat beroperasi dengan efisien.
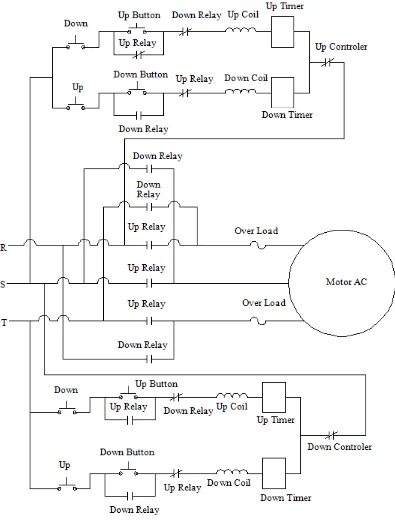
3.6. Perancangan Pengendali Otomatis Elevator
Perancangan pengendali otomatis melibatkan pengembangan sistem kontrol. Mahasiswa belajar tentang metode pengendalian yang berbeda dan penerapannya. Ini memberikan pengalaman praktis dalam mengembangkan solusi teknik yang kompleks.
IV. PEMBUATAN PROTOTIPE PENGENDALI OTOMATIS ELEVATOR
Bagian ini menjelaskan proses pembuatan prototipe pengendali otomatis elevator. Proses ini mencakup instalasi dan pengujian berbagai komponen. Mahasiswa mendapatkan pengalaman praktis yang berharga dalam merakit sistem elektronik dan mekanik.
4.1. Instalasi Prototipe Pengendali Otomatis Elevator
Instalasi prototipe melibatkan pengaturan semua komponen dalam sistem. Mahasiswa belajar tentang pentingnya perakitan yang rapi dan terorganisir. Keterampilan ini sangat penting dalam dunia teknik, di mana kesalahan kecil dapat menyebabkan masalah besar.
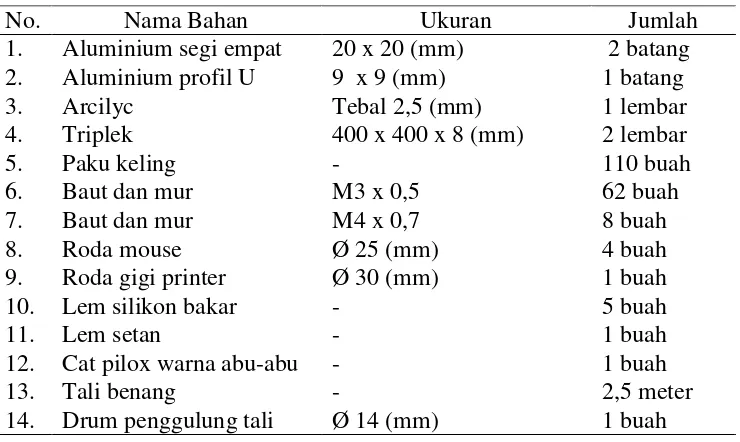
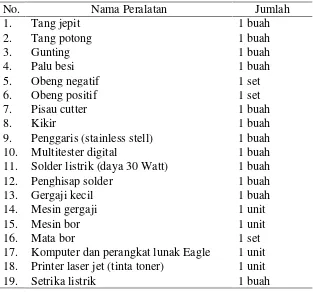
4.2. Bahan-bahan dan Peralatan
Bagian ini mencakup pemilihan bahan dan peralatan yang diperlukan untuk pembuatan prototipe. Mahasiswa belajar untuk memilih komponen yang tepat berdasarkan spesifikasi teknis. Ini mengajarkan mereka tentang pentingnya pemilihan bahan dalam desain teknik.
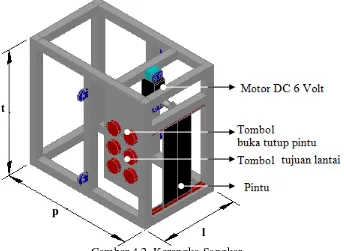
4.3. Pembuatan Prototipe Elevator
Pembuatan prototipe meliputi konstruksi fisik elevator. Mahasiswa mendapatkan pengalaman langsung dalam membangun sistem. Ini memberikan wawasan praktis tentang bagaimana teori diterapkan dalam praktik.
4.4. Modul Mikrokontroler ATmega 8535
Modul mikrokontroler adalah otak dari sistem pengendali. Mahasiswa belajar tentang pemrograman dan konfigurasi mikrokontroler. Ini penting untuk memahami bagaimana perangkat lunak mengendalikan perangkat keras.
4.5. Komponen Elektronika
Bagian ini membahas berbagai komponen elektronika yang digunakan dalam sistem. Mahasiswa belajar tentang fungsi masing-masing komponen dan bagaimana mereka berinteraksi. Ini memberikan pengetahuan praktis yang penting untuk pengembangan sistem elektronik.
4.6. Rancangan Kerja Prototipe Pengendali Otomatis Elevator
Rancangan kerja menjelaskan bagaimana sistem akan beroperasi. Mahasiswa belajar untuk mendokumentasikan proses dan prosedur dengan jelas. Keterampilan ini sangat penting dalam komunikasi teknik dan kolaborasi tim.
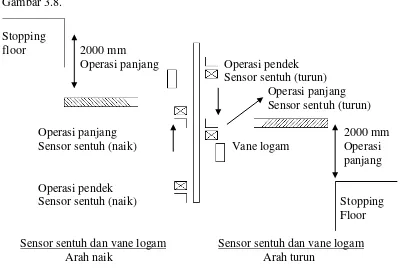
4.7. Gerak Dasar Prototipe Pengendali Otomatis Elevator
Gerak dasar prototipe mencakup bagaimana elevator bergerak dan berhenti. Mahasiswa belajar tentang pengendalian gerakan dalam sistem mekanik. Ini memberikan pengalaman praktis dalam desain sistem kontrol.
4.8. Diagram Alir Sistem Kerja Prototipe Pengendali Otomatis Elevator
Diagram alir memberikan gambaran visual tentang proses kerja sistem. Mahasiswa belajar untuk menyusun diagram alir yang jelas dan informatif. Ini penting untuk analisis sistem dan pengembangan perangkat lunak.
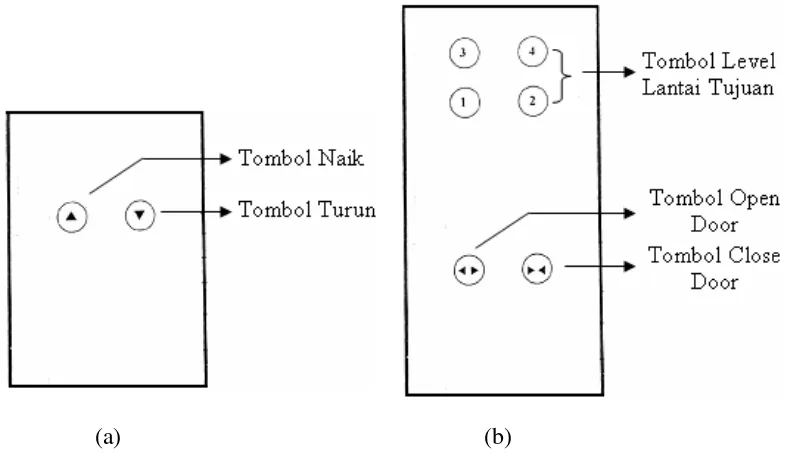
4.9. Penentuan Masukan/Keluaran (Input/Output)
Penentuan masukan/keluaran menjelaskan interaksi antara sistem dan pengguna. Mahasiswa belajar untuk mendefinisikan dan mendokumentasikan antarmuka sistem. Ini penting untuk memastikan bahwa sistem dapat digunakan dengan efektif.
4.10. Pemrograman Bahasa C Menggunakan CodeVision AVR
Pemrograman menggunakan bahasa C untuk mengendalikan sistem. Mahasiswa belajar tentang sintaks dan struktur pemrograman. Ini memberikan keterampilan pemrograman yang berharga untuk pengembangan perangkat lunak.
V. HASIL DAN PEMBAHASAN
Bagian ini menyajikan hasil dari pengujian prototipe dan analisis kinerjanya. Hasil yang diperoleh memberikan wawasan tentang efektivitas desain. Mahasiswa belajar untuk menganalisis data dan menarik kesimpulan berdasarkan hasil pengujian.
5.1. Menjalankan Sistem
Menjalankan sistem mencakup pengujian operasional elevator. Mahasiswa belajar untuk mengidentifikasi masalah yang mungkin muncul selama pengujian. Keterampilan ini penting untuk troubleshooting dalam sistem teknik.
5.2. Data Demonstrasi
Data demonstrasi menyajikan hasil pengujian dalam bentuk tabel dan grafik. Mahasiswa belajar untuk menyajikan data dengan cara yang jelas dan informatif. Ini penting untuk komunikasi hasil penelitian.
5.3. Kecepatan Angkat Prototipe Pengendali Otomatis Elevator
Kecepatan angkat menunjukkan efisiensi sistem. Mahasiswa belajar untuk menganalisis kecepatan dan mengaitkannya dengan desain. Ini memberikan pemahaman tentang kinerja sistem dalam konteks aplikasi nyata.
5.4. Kondisi Kerja Prototipe Pengendali Elevator pada Saat Mencapai Batas Over Limit
Kondisi kerja pada batas over limit menguji keamanan sistem. Mahasiswa belajar untuk memahami pentingnya keselamatan dalam desain. Ini memberikan wawasan tentang bagaimana sistem dapat dirancang untuk mencegah kegagalan.
VI. KESIMPULAN DAN SARAN
Bagian ini menyimpulkan hasil penelitian dan memberikan rekomendasi untuk pengembangan lebih lanjut. Kesimpulan yang jelas membantu mahasiswa memahami hasil dari proyek mereka. Ini penting untuk refleksi dan perbaikan dalam proyek mendatang.
6.1. Kesimpulan
Kesimpulan merangkum temuan utama dari penelitian. Mahasiswa belajar untuk menyusun kesimpulan yang jelas dan ringkas. Ini penting untuk presentasi hasil di depan audiens akademis atau profesional.
6.2. Saran
Saran memberikan rekomendasi untuk penelitian atau pengembangan lebih lanjut. Mahasiswa belajar untuk memberikan masukan yang konstruktif. Ini penting untuk pengembangan berkelanjutan dalam bidang teknik.