BAB I PENDAHULUAN
I.1. Latar belakang
Pemetaan topografi dilakukan untuk menentukan posisi planimetris (x,y) dan posisi vertical (z) dari objek-objek dipermukaan bumi yang meliputi unsur – unsur alamiah seperti : sungai, gunung, danau, padan grumput, rawa dan sebagainya serta unsur-unsur buatan manusia seperti rumah, sawah, jembatan, jalan, jalur pipa, rell kereta api dan sebagainya. Ilmu Geodesi pada mulanya adalah cabang terapan dari ilmu matematis, ilmu bumi bersama ilmu Geologi, geofisika dan lain sebagainya. Yang perkembanganya dipengaruhi oleh perkembangan teknologi dan metedologi dan aplikasi instrument ukur Geodesi untuk keperluan pengukuran dan rekayasa yang dikenal dengan engineering surveying yang di Timor - Leste dikenal dengan Teknik Geodesi.
Ilmu Geodesi mempunyai dua maksud yaitu:
Maksud Ilmiah : menentukan bentuk dari permukaan bumi
Maksud Praktis : membuat bayangan yang dinamakan peta dari sebagian besar atau sebagian kecil dari permukaan bumi.
1.2. Maksud dan tujuan
Praktikum ilmu ukur tanah ini di maksudkan sebagai aplikasi lapangan dari teori-teori dasar ilmu ukur tanah yang didapatkan oleh praktikum di bangku kuliah seperti polygon,alat dan pengunaannya,sampai pada penbuatan peta. Tujuan yang di ingin dicapai dari praktikum ilmu ukur tanah ini adalah agar praktikum dapat mengetahui dan memahami dengan baik bagaimana menggunakan alat , mengukuran polygon mengolah data dan pengambaran peta. 1.2.1. Maksud Pekerjaan
Maksud dilakukannya praktikum adalah sebagai berikut ini :
1. Mahasiswa dapat melakukan praktikum sesuai dengan yang diajarkan pada bangku perkuliahan.
2. Mahasiswa dapat memperoleh gambaran yang lebih luas mengenai bidang ke ilmuan geodesi, khususnya ilmu ukur tanah yang semakin maju perkembangannya.
3. Mahasswa dapat mengatasi masalah yang terjadi pada waktu pengukuran. 4. Mahasiswa dapat mengenal azimuth matahari
5. Mahasiswa dapat mengenal polygon tertutup.
6. Mahasiswa dapat mengenal peta topografi dengan menggunakan garis kontur. 1.2.2. Tujuan pekerjaan
Melalui praktikum ilmu ukur tanah ini tujuan yang ingin kami capai sebagai berikut : 1. Mengetahui teknik-teknik pengukuran
2. Mengetahui cara menentukan posisi relative pada daerah yang relative sempit 3. Dapat menentukan / mencari bedah tingi pada tiap tiap posisi
4. Dapat menentukan / mencari nilai azimuth pada tiap tiap titik 5. Dapat mengunakan alat ukur ( theodolit ) dengan baik danbenar
1.3. Volume Pekerjaan 1. Orientasi lapangan
2. Pengukuran beda tinggi (theodolith) 3. Pengukuran polygon tertutup 4. Pengukuran detail
5. Pengamatan azimuth matahari 6. Pengukuran jarak langsung I.4. Metode Penulisan
Metode penulisan yang digunakan dalam penyusunan laporan praktikum ini adalah : 1.4.1. Stude Literature, didasari pada teori - teori yang diberikan selama perkuliahan dan dari
buku-buku lain yang berikan kepada dosen-dosen.
BAB II DASAR TEORI
2.1. PetaTopografi
Peta topografi adalah peta penyajian unsur-unsur alam asli dan unsur-unsur buatan manusia diatas permukaan bumi. Unsur-unsur alam tersebut diusahakan diperlihatkan pada posisi yang sebenarnya. Mengenai pengukuran melalui titik kontrol yang telah menguraikan cara-cara penempatan titik kontrol yang dibutuhkan untuk pengukuran melalui titkik kontrol yang dibutuhkan untuk pengukuran pemetaan topografi. Pemetaan topografi yang di buat berdasarkan koordinat yang telah ditentukan pada pengukuran titik kontrol.
Pemetaan topografi merupakan suatu pekerjaan yang memperlihatkan posisi keadaan planimetris diatas permukaan bumi dan bentuk diukur dan hasilnya digambarkan diatas kertas dengan simbol-simbol peta pada skala tertentu yang hasilnya berupa peta topografi.
Peta topografi mempunyai ciri khas yang dibuat dengan teliti (secara geometris dan georefrensi) dan penomorannya berseri, standart. Peta topografi mempunyai peta dasar (base map) yang berarti kerangka dasar (geometris/georefrensi) bagi pembuatan peta-peta lain.
2.2. Orientasi Lapangan
Sebelum melaksanakan kegiatan pengukuran, berbagai persiapan diperlukan agar pengukuran dapat berjalan lancar. Beberapa tahapan yang harus disiapkan tersebut antara lain meliputi :
Reconnaissance, yaitu penentuan lokasi secara garis besar ditentukan secara hati-hati pada peta-peta skala kecil dan dari foto udara dan penjelajahan lapangan.
Preliminary, yaitu survey yang dilakukan pada lokasi terpilih dan pada survey ini dilakukan penentuan titik control kerangka peta dan sudah ditentukan metode pengukuran yang paling efisien. Pada tahapan ini biasanya juga dihitung kebutuhan logistik, masa kerja dan target yang harus dicapai setiap hari kerja.
A
2 4
1
2.3. Kerangka Kontrol Peta.
Penentuan kerangka control peta adalah salah satu tahapan yang harus dilaksanakan dalam proses pembuatan peta topografi. Adapun kerangka control peta terbagi atas dua macam yaitu: kerangka control vertical dan kerangka kontrol horizontal.
2.4. Kerangka Kontrol Horizontal
Selain penentuan kerangka kontrol horizontal (KKH), pembuatan peta topografi, kerangka kontrol horizontal juga sangat penting. Pengukuran kerangka kontrol horizontal biasanya dilakukan dengan metode :
Metode Triangulasi (rangkaian segitiga untuk KKH dengan diketahui sudutnya ) Metode Trilaterasi (rangkaian segitiga untuk KKH dengan diketahui jaraknya) Metode Poligon (rangkaian titik-titik yang membentuk segi banyak)
Dalam laporan praktikum ini akan dijelaskan mengenai pengukuran kerangka kontrol horizontal menggunakan metode poligon. Dalam pengukuran dengan menggunakan metode polygon terdapat tiga data, yaitu :sudut, jarak, azimuth.
2.3.1.1. Pengukuran Sudut:
Sudutad alah Metode pengukuran sudut dapat menjadi dua (2) yaitu :
Sudut tunggal
Pada pengukuran sudut tunggal hanya didapatkan satu data ukuran sudut horizontal
Sudut tunggal
Sudut ganda
Gambar2.3.2 Pengukuran jarak langsung
A
2 4
1
d3 d1
2’
1’ 2
1 d total
Ada pun cara pengukuran sudutnya:
Pada titik 1 dimana alat didirikan, teropong diarahkan ketitik 4 dengan tidak perlu mengesetkan 0000’00” lalu dibaca bacaan skala piringan horizontalnya. Setelah itu arahkan
kembali teropong ke titik 2, baca bacaan piringan horizontalnya. Untuk mendapatkan sudutnya yaitu dengan mengurangkan bacaan piringan horizontal pada titik 2 dan 4. Untuk mengontrol sudut tersebut perlu dilakukan pembacaan skala piringan horizontal luarbiasa pada titik-titik tersebut sehingga didapatkan 4 sudut (pengukuran 1 serirangkap) Cara ini disebut juga cara reitrasi .
2.3.1.2. Pengukuran jarak
Pengukuran jarak untuk kerangka control peta, dapat dilakukan dengan cara langsung menggunakan alat sederhana yaitu roll meter atau dengan alat sipat datar yaitu jarak optis, sedangkan untuk mendapatkan data jarak yang lebih teliti dibandingkan dengan dua cara yang ada, data jarak didapat juga dengan alat pengukur jarak elektonis EDM (elektro distance measurement)
A. Pengukuran jarak langsung
ti
∆hAB : beda tinggi antara titik A & titik B bt : bacaan skala rambu ukur
B. Pengukuran jarak optis
Pengukuran jarak optis adalah pengukuran jarak secara tidak langsung karena dibantu dengan alat sipat datar atau theodolit dan rambu ukur. Dimana pada teropongan latterbelakan dapat tiga benang silang, benang atas (ba), benang tengah (bt), benang bawah (bb) yang merupakan data untuk mendapatkan jarak.
D = (ba - bb) x 100 ; untuk sipat datar. D = (ba - bb) x 100 x sin2
Z; untuk teodolith
2.3.2. Kerangka Kontrol vertikal.
Dalam melakukan pengukuran kerangka control vertical dapat dilakukan dengan metode barometris, tachimetri, dan metode water pass.
Pada laporan ini akan dijelaskan mengenai penentuan kerangka control vertical dengan menggunakan metode water pass.
2.3.2.1. Pengukuran Waterpass (Levelling)
Waterpassing dengan sipat datar ketinggiannya berdasarkan suatu sistem referensi atau bidang acuan. Sistem referensi yang dipergunakan adalah tinggi permukaan air laut rata-rata (mean sea level) atau sistem referensi lain yang dipilih.
Macam-macam pengukuran beda tinggi antara lain adalah sebagai berikut ini : a. Pengukuran beda tinggi dengan waterpass/sipat datar
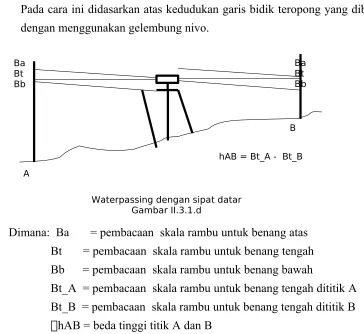
Pada cara ini didasarkan atas kedudukan garis bidik teropong yang dibuat horizontal dengan menggunakan gelembung nivo.
Dimana: Ba = pembacaan skala rambu untuk benang atas Bt = pembacaan skala rambu untuk benang tengah Bb = pembacaan skala rambu untuk benang bawah
Bt_A = pembacaan skala rambu untuk benang tengah dititik A Bt_B = pembacaan skala rambu untuk benang tengah dititik B hAB = beda tinggi titik A dan B
Persamaan di atas merupakan persamaan dasar untuk penentuan beda tinggi dengan cara sipat datar. Hasil pengukuran beda tinggi digunakan untuk menentukan tinggi titik terhadap titik tetap atau bidang acuan yang telah dipilih. Tinggi titik hasil pengukuran waterpass terhadap titik acuan dihitung dengan rumus :
Hb = Ha + hAB Dimana :
Hb : tinggi titik yang akan ditentukan Ha : tinggi titik acuan
B
A 1
2
BtbA Btm1
Btb1 Btm2Btb2 BtmB
Waterpasing Memanjang Gambar II.3
Ket : Btb : pembacaan skala rambu ukur Untuk benang tengah belakang
Btm : pembacaan skala rambu ukur Untuk benang tengah muka
A,1,2,B : no. titik
Ada berbagai macam cara penentuan tinggi titik dengan menggunakan waterpasing atau sipat datar, salah satunya yaitu :
Waterpasing memanjang / waterpasing berantai.
Waterpasing memanjang mempunyai tujuan untuk menentukan tinggi titik secara teliti. Waterpasing memanjang ini diperlukan dalam pengukuran kerangka
kontrol vertikal, misalnya penentuan tinggi titik poligon.
Pada pengukuran waterpasing memanjang, pengukuran dibagi menjadi beberapa slag. Beda tinggi antara A dan B merupakan jumlah beda tinggi dari semua slag. Beda tinggi A dan B dapat dihitung sebagai berikut :
hA1 = BtbA – Btm1 h12 = Btb1 – Btm2 h23 = Btb2 – Btm3
hnn = Btbn - Btmn
hAB = hnn = Btbn - Btmn
Keterangan rumus diatas : h : beda tinggi
Btb : pembacaam skala rambu ukur untuk benang tengah belakang Btm : pembacaam skala rambu ukur untuk benang tengah muka
: jumlah
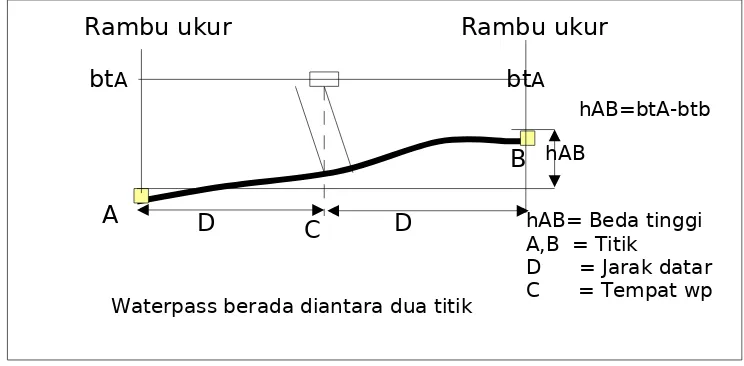
hAB
Waterpass berada diantara dua titik
Poligon terutup 1. Garis bidik sejajar dengan garis arah nivo. 2. Garis arah nivo tegak lurus pada sumbu satu. 3. Garis mendatar diafragma tegak lurus sumbu satu 2.4.Pengukuran Poligon
Poligon merupakan rangkaian titik-titik yang membentuk segibanyak. Rangkaian titik tersebut dapat diguakan sebagai kerangka peta. Koordinat titik tersebut dapat dihitung dengan data masukan yang merupakan hasil dari pengukuran sudut dan jarak. Posisi titik-titik di lapangan dapat ditentukan dengan mengukur jarak dan sudut kearah titik kontrol.
Posisi titik-titik control haruslah mempunyai ketelitian yang tinggi dan distribusinya dapat menjangkau semua titik.
Berdasarkan bentuk geometrisnya, polygon dapat dibedakan atas polygon terbuka dan polygon tertutup.
Poligon Tertutup
Merupakan polygon dengan titik awal dan titik akhir berada pada titik yang sama.
D12,d23…. : jarak pengukuran sisi poligon S1,S2,S3,… : sudut pada titik poligon
Persyaratan geometris yang harus dipenuhi bagi polygon tertutup :
S + F(S) = (n-2) x 1800………(1-5)
Beberapa hal yang harus diperhatikan dalam penyelesaian poligon : Jarak, sudut, azimuth rata-rata dihitung dari data ukuran :
x=
∑
i=1
n
Xi
n ...(1−8)
dimana : X : data ukuran rata-rata Xi : data ukuranke-I n : jumlah pengukuran Besar sudut tiap titik hasil setelah koreksi S’ = S + F F(S) / n………(1-9) Dimana : S’ : sudut terkoreksi
S : sudut ukuran
Azimuth semua sisi polygon dihitung berdasarkan azimuth awal dan sudut semua titik hasil koreksi (S’) :
Jika urutan hitungan azimuth sisi polygon searah dengan jarum jam, rumus yang digunakan : An.n+1 = (An-1.n + 1800) -Sd’………….(1-10)
An.n+1 = (An-1.n + Sl’) – 1800………….(1-11)
An.n+1 = (An-1.n + Sd’) – 1800….……….(1-12)
An.n+1 = (An-1.n + 1800) – S1….………..(1-13)
Dimana : n : nomor titik
An.n+1 : azimuth sisi n ke n+1
An-1.n : azimuth sisi n-1 ke n
Sd’ : sudut dalam terkoreksi Sl’ : sudut luar terkoreksi
Koordinat sementara semua titik poligon, rumus yang digunakan : Xn = Xn-1 + d Sin An-1.n………….(1-14)
Yn = Yn-1 + d Cos An-1.n…………(1-15)
Dimana: Xn, Yn : koordinat titik n Xn-1,Yn-1 : koordinat titik n-1
Koordinat terkoreksi dari semua titik polygon dihitung dengan rumus : Xn = Xn-1 + dn Sin An-1.n + (dn / d) x F(X)………..(1-16)
Yn = Yn-1 + dn Cos An-1.n + (dn / d) x F(Y)……….(1-17)
Dimana : n : nomor titik
Xn, Yn : koordinat terkoreksi titik n Xn-1.n , Yn-1.n : koordinat titik n-1
dn : jarak sisi titik n-1 ken An-1 : azimuth sisi n-1 ken Ketelitian polygon dinyatakan dengan :
F(L) = F(X)2 + F(Y)21/2……….(1-18)
K = d / F(L)
Dimana: F(L) : kesalahan jarak
F(X) : kesalahan linier absis F(Y) : kesalahan linier ordinat
d : jumlah jarak
K : ketelitian linier poligon Kesalahan azimuth.
Pengukuran Posisi Vertikal
ti
H
Z
Dmm
Ba Bt Bb
Dd
hAB
B 2.4. Pengamatan Detail
Yang dimaksud dengan detail atau titik detail adalah semua benda-benda di lapangan yang merupakan kelengkapan dari pada sebagian permukaan bumi. Jadi, disini tidak hanya dimaksudkan pada benda-benda buatan seperti bangunan-bangunan, jalan-jalan dengan segala perlengkapan dan lain sebagainya.Jadi, penggambaran kembali sebagian permukaan bumi dengan segala perlengkapan termasuk tujuan dari pengukuran detail, yang akhirnya berwujud suatu peta.Berhubung dengan bermacam-macam tujuan dalam pemakaian peta, maka pengukuran detail pun menjadi selektif, artinya hanya detail-detail tertentu yang diukur guna keperluan suatu macam peta.
Tahap-taha ppengukuran detail: 1. Pengukuran posisi vertical
Pada pengukuran posisi vertical dilakukan dengan menggunakan alat ukur theodolite sehingga memungkinkan untuk menentukan posisi vertical dan horizontal dari titik detail secara bersamaan (metode tachimetri).
Dm = ( Ba – Bb ) x 100 . cos h Dd =Dm . sin2 z
Dd = Dm . cos2 h
h = Ti + Dm Sin Z – Bt H1 = HA + hA1
Dimana : Dm : jarak miring
Ba : pembacaan skala rambu ukur untuk benang atas Bb : pembacaan skala rambu ukur untuk benang bawah Z : zenith h : bedat inggi
h : heling Z :sudut zenith Dd : jarak datar H : elevasi
Pengukuran posisi horizontal
Pada pengukuran posisi horizontal dapat dilakukan dengan beberapa metode yaitu metode polar dan radial. Pengukuran metode polar menggunakan grid – grid yang digunakan untuk membantu pengukuran detail. Titik-titik detail pada grid diukur dari titik polygon tempat berdiri alat.
BAB III
3.1 ORIENTASI LAPANGAN
Sebelum dilakukan pengukuran terlebih dahulu dilakukan persiapan untuk kelancaran praktikum dengan langkah-langkah sebagai berikut :
1. Pemeriksaan dan penentuan batas wilayah dimana praktikum akan dilaksanakan. 2. Memasang patok yang sudah dilengkapi dengan paku payung untuk titik-titik poligon 3. Pemilihan alat yang akan digunakan sesuai dengan kebutuhan dan kondisi lapangan.
3.2 Pengukuran Poligon Tertutup
Dalam pelaksanaan praktikum Ilmu Ukur Tanah II ini dapat dilaksanakan beberapa tahap pengukuran terhadap poligon tertutup, yaitu:
a. Pengukuran Sudut Alat yang digunakan :
1. Theodolit sokkn PT 55...1 buah 2. Statif ...1 buah 3. Patok ...4 buah 4. Paku payung ...4 buah 5. Payung ...1 buah
Pelaksanaan Praktikum :
Langkah kerja pelaksanaan pengukuran poligon adalah sebagai berikut :
1. Orentasi lapangan dari daerah yang akan dipetakan dan menancapkan patok-patok sebagai titik poligon pada tempat yang baik agar dapat melakukan pengukuran poligon dengan baik, antara patok belakang dengan patok muka harus saling kelihatan.
2. Patok-patok tersebut diberi nomor urut sesuai urutan dan masing-masing ujungnya dipasangkan paku payung.
3. Theodolit didirikan diatas titik (BM) atau titik poligon awal dan lakukan centering optis terhadap paku payung kemudian diatur sesuai prosedur.
P1
5. Kunci penggerak limbus dan penggerak piringan horizontal serta penggerak piringan vertikal kemudian tepatkan perpotongan benang silang teropong pada paku payung dengan menggunakan penggerak halus horizontal maupun penggerak vertikal.
6. Baca bacaan skala horizontal dan catat sebagai bacaan “Biasa “ arah titik P4. 7. Buka kunci penggerak piringan horizontal dan vertikal kemudian bidik titik P2 8. Baca bacaan skala piringan horizontal dan catat sebagai bacaan “Biasa “ arah titik P2.
9. Buka kunci penggerak horizontal dan vertikal kemudaian putar Theodalite pada keadaan “ Luar Biasa “. Kemudian bidik titi P4 dan P2 dan baca skala piringan horisontalnya.
Untuk titik poligon selanjutnya ( P1 – P4 ) sampai selesai, langkah pengukurannya sama dengan langkah pengukuran seperti yang tersebut diatas.
Sket pengukuran poligon
Keterangan:
P1,P2,… : titik polygon S1,S2,… : sudut dalam
α12 : sudut azimuth matahari
d12,d23,… : jarak antar titik poligon
Data polygon tertutup:
Roll meter
S1: 104o4’ 50” α
12 : 14o32’ 56 d12 : 50.500 m S2: 103o 55’ 40” α
23 : 298o 28’ 44” d23 : 82.699 m S3: 96o17’7” α
34 : 214o45’57” d34 : 68.937 m S4: 89o0’33” α
45 : 123o46’35” d45 : 56.204 m S5: 146o41’23” α
51 : 90o28’2” d51 : 52.604 m
3.3 Pengukuran Jarak Alat yang digunakan : 1. Roll meter 1 buah
2. Jalon 2 buah
Cara praktikum : pengukuran jarak langsung
Tujuan : Agar para mahasiswa mampu melakukan pengukuran poligon yang nantinya berfungsi sebagai titik ikat / titik kontrol dalam pemetaan
Dalam pengukuran jarak disini dilakukan dengan pengukuran jarak langsung. Pengukuran jarak langsung antara masing-masing titik poligon tersebut dilakukan dengan cara pelurusan dengan bantuan jalon supaya hasil pengukuran jarak langsung mempunyai ketelitian yang tinggi.
Langkah kerja pengukuran jarak langsung :
1. Lakukan pelurusan terhadap dua titik yang akan diukur .
2. Ukur jarak titik poligon 1 ke titik poligon 2 dengan menggunakan roll meter. 3. Baca bacaan jarak yang tertera pada roll meter dan catat.
4. Apabila antara dua titik poligon terlalu jauh untuk diukur langsung dengan menggunakan roll meter, maka dilakukan pelurusan dengan menggunakan bantuan jalon.
5. Lakukan kegiatan pengukuran diatas dengan menggunakan roll meter sampai pada titik poligon terakhir.
Pengukuranan jarak langsung titik A ke titik B dengan menggunakan roll meter (<10m).
Gambar 3.2
Pengukuran jarak langsung 4.3.4. Pengukuran Waterpass Memanjang
Alat yang digunakan :
1. Waterpass wild NA 24/auto level...1 buah 2. Statif…… ...1 buah 3. Rambu ukur...1 buah 4. Roll meter ...1 buah 5. Payung…...1 buah
Acara praktikum : pengukuran waterpass memanjang
Tujuan : Untuk mengetahui beda tinggi antara masing-masing titik poligon sehingga bisa dihitung elevasinya.
Pelaksanaan Praktikum :
Langkah kerja pelaksanaan pengukuran alat waterpass adalah sebagai berikut : 1. Alat didirikan titik 1 dan rambu ukur di dirikan titik 2, kemudian atur sesuai prosedur. 2. Dirikan alat di titik 1
3. Bidik rambu ukur titik 2 dengan alat waterpass, tepatkan perpotongan benang silang teropong pada bacaan rambu kemudian baca bacaan benang atas, benang tengah dan benang bawah dan catat sebagai bacaan rambu muka titik 3. Lakukan kontrol bacaan benang dengan menggunakan
rumus :
bt
=
ba
+
bb
2
4. Pindahkan alat pada posisi titik 3 dengan alat waterpass, tepatkan perpotongan benang silang teropong pada bacaan rambu kemudian baca bacaan benang atas, benang tengah dan benang bawah dan catat sebagai bacaan rambu muka titik 4. Lakukan kontrol bacaan benang dengan
menggunakan rumus :
bt
=
ba
+
bb
5. Pindahkan alat pada posisi titik 4 dan lakukan langkah pekerjaan seperti yang telah dijelaskan diatas sampai selesai.
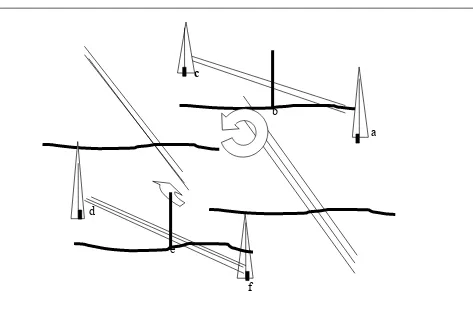
Sket pengukuran alat waterpass:
c
b
a
d
e
f
Gambar 3.3
Pengukuran alat waterpass Keterangan :
P1,p4 = nomor titik poligon = titik poligon
A,B = posisi waterpass
3.5 Pengukuran Detail
Hari / tanggal : rabu-sabtu / 1-4 desember 2015 Lokasi : Bidau Tobaru
a
1. Theodolit sokkin PT 55...1 buah
2. Statif 1 buah
3. Rambu ukur 1 buah
4. Payung 1 buah
5. Roll meter 1 buah Pelaksanaan Praktikum :
Langkah kerja pelaksanaan pengukuran poligon adalah sebagai berikut :
1. Theodolit dirikan di titik 1 dan lakukan prosedur centering optis terhadap paku payung sesuai dengan prosedur.
2. Ukur tinggi alat dan tinggi patok dengan rool meter dan catat dalam formulir.
3. Back sight ke titik poligon terdekat ( titik 2 ) dan piringan skala horizontal ditepatkan pada bacaan 0 0 0’ 0” , kemudian kunci penggerak horizontal dan penggerak limbus.
4. Gambar sket dari titik-titik yang berada disekitar titik 1 yang akan diukur dan diberi nomor urut untuk memudahkan pencatatannya.
5. Dirikan rambu ukur pada titik detail yang akan diukur sesuai dengan gambar sketnya dengan dilengkapi nivo rambu.
6. Buka kunci penggerak horizontal, bidik rambu pada titik detail tersebut, kemudian baca bacaan benang atas, benang tengah dan benang bawah dan skala piringan horizontal dan skala piringan vertikal kemudian catat pada formulir ukur.
7. Pindahkan rambu ukur pada titik detail berikutnya sesuai dengan gambar dan lakukan pengukuran seperti langkah no.5 sehingga didapatkan titik detail disekitar titik poligon 1 terukur semua.
8. Pindahkan theodolit pada titik poligon 2 kemudian lakukan centering optis terhadap paku payung dan atur sesuai prosedur.
9. Ukur kembali tinggi alat dan tinggi patok dengan rool meter dan catat dalam formulir. 10. Lakukan langkah-langkah pengukuran seperti langkah pengukuran no.3 sampai no.9,
sehingga titik detail terukur semua. Sket pengukuran detail :
P2
BACKSIGHT
FORSIGHT
Gambar 3.4 Sket pengukuran situasi Keterangan :
a, b, c = posisi titik detail P1, P2, = posisi titik poligon
= posisi alat
Sa = Sudut yang dibentuk ke titik a
Sb = Sudut yang dibentuk ke titik b
Sc = Sudut yang dibentuk ke titik c
Titik 2 = sebagai back sight
3.6. Penggambaran Detail
Setelah tahap perhitungan selesai, tahap selanjutnya adalah tahap penggambaran. Penggambaran detail ini dapat dilakukan dengan bantuan atau memakai busur derajat. Penggambaran yang kami adalah penggambaran peta situasi dengan skala 1:500.
Adapun tahap penggambaran situasi adalah sebagai berikut: Tahap pertama:
Mempersiapkan alat-alat yang akan digunakan
Mempersiapkan data yang telah diolah untuk diplot atas kertas milimeter. Tahap kedua:
Pengeplotan titik-titIk kerangka dasar horisontal berdasarkan koordinat hasil perhitungan poligon.
Pengeplotan titik-titik detail dari hasil pengukuran situasi.
Penarikan garis kontur dengan cara interpolasi.
Pada setiap garis kontur dicantumkan ketinggiannya. Tahap keempat:
Setelah tahap-tahap diatas selesai kemudian dipindahkan atau diplot diatas kertas kalkir dengan mamakai rapido.
BAB IV ANALISA DATA
P1 P4
BM
Dalam pengukuran kerangka kontrol horisontal, jarak yang diambil dengan jarak langsung yaitu dengan menggunakan roll meter.
Dari pengukuran jarak langsung diperoleh jarak
Data perhitungan jarak langsung memakai roll meter
No Bacaan Jarak Jarak
Pergi (m) Pulang (m) Rata -rata BM
LB1 = 284o04’30’’
LB2 = 284o04’20’’
Sudut dalam biasa : (B1) = 104o04’30’’
(B2) = 104o06’00’’
Sudut dalam luar biasa : (LB1) = 104o04’30’’
(LB2) = 104o04’20’’
Sudut rata rata(sudut horizontal) = 104o04’50’’
Koreksi terhadap sudut dalam horizontal : ∑s = ( n - 2 ) * 180 o
= ( 5 - 2 ) * 180 o
Sedangkan jumlah sudut horizontal adalah 539 o 59’ 33” , jadi besar kesalahan sudut
horizontal :
f(s) = 540 o – 539 o 59’ 32.5”
f(s) = 00 o 00’ 27.5”
Maka besar koreksi untuk setiap sudutnya adalah :
00
°
00
'
27.5} over {5} } =00°00'5,3
¿¿
Dalam bentuk tabel : Titik Poligon
Sudut Dalam Koreksi Sudut Dalam terkoreksi
BM
104
°
04
'
50} {¿
4.5104
°
04
'
54.5} {¿
P1
103
°
55’ 40” 7.1103
°
55’47.3”
P2
96
°
17’ 7.5” 6.596
°
17’13.6”
P3
89
°
00’ 32.5” 4.089
°
00’37.5”
P4
146
°
41’ 22.5” 4.4146
°
41’Σs
=
539
°
59’52.5”
f(s) = 26.5
Σs
d=
540
°
0’ 0”4.2.3 Perhitungan Koordinat Titik Poligon
Diketahui koordinat awal titik poligon ( BM ) adalah : Xawal = 2000
Yawal = 2000
Maka koordinat pada titik poligon dapat diketahui dengan rumus :
XB
=
XA
+
dAB
.sin
α AB
+
FX
1
YB
=
YA
+
dAB
.cos
α AB
+
FY
1
Perhitungan koordinat untuk tiap poligon adalah :
XB = 2000+(12.686)+−0.001
= 2012.685
YB = 2000+(48.881)+−0.001
= 2048.878
Data koordinat yang didapat dari perhitungan Titik Koordinat X Koordinat Y
P1 2012,685 2048.878
P2 1939,993 2088.31
P3 1900,683 2031.678
P4 1947,399 2000.43
4.2.4 Ketelitian Linier Poligon
Perhitungan ketelitian linier poligon menggunakan rumus sebagai berikut :
KL= CD
∑
DDimanaCD
=
√
f
(
ΔX
)
2+
f
(
ΔY
)
2KL = ketelitian linier D = jumlah jarak poligon f(X) = kesalahan penutup absis f(Y) = kesalahan penutup ordinat
Sehingga CD
=
√
(−
0
,
003
)
2+(−
0.008
)
2 = 0.0085KL
=
310.944
0
,
000073
= 1 : 2005.634
Jadi ketelitian linier poligon adalah 1 : 2005
Ketelitian linier yang diminta adalah 1: 2000, jadi pengukuran diatas telah masuk dalam batas toleransi
4.2. Perhitungan Waterpass Memanjang
1. Perhitungan beda tinggi dan Elevasi titik poligon.
Untuk perhitungan beda tinggi tiap-tiap titik poligon menggunakan rumus sebagai berikut: h12 = btB - btM
Keterangan :
h12 = beda tinggi antara dua titik ( titik 1 ke titik 2 )
btB = bacaan benang tengah rambu belakang
btM = bacaan benang rambu muka
Rumus yang digunakan untuk menghitung elevasi adalah : H1 = Hawal + h1
Keterangan :
H1 = Elevasi titik1
Hawal = Elevasi yang diketahui
h12 = Beda tinggi titik 1 ke titik 2
Perhitungan data hasil pengukuran : HB = Hawal h1 koreksi
Contoh pengolahan data hasil pengukuran waterpass memanjang pergi : Diketahui :
Titik BM btB = 1767
Titik P1 btM = 1554
Maka : hAB= 1767-1554
= 0.213
Pada poligon tertutup, jumlah beda pengukuran waterpass memanjang pergi – pulang harus sama dengan nol (0) atau mendekati nol (0), karena pengukuran kembali ketitik semula.
Toleransi kesalahan dari pengukuran waterpass memanjang yang diberikan adalah 8√d
o Dari pengukuran pergi
Dengan jarak pengukuran pergi 310.944 m = 0,310944 km maka : Ketelitian : 8√0.310944 = 0.00461 mm
o Dari pengukuran pulang
Dengan jarak pengukuran pulang 310.944 m = 0,310944 km maka : Ketelitian : 8√0.310944 = 0.00461 mm
Jadi pengukuran waterpass memanjang pergi – pulang masih dalam toleransi yang ditentukan,
yaitu
8
√
D
. Maka dapat disimpulkan bahwa selisih hasil pengukuran beda tinggi pergi-pulang termasuk dalam toleransi.4.3. Analisa data
1. Pengamatan Azimuth Matahari
Maksud dari pengukuran azimuth matahari adalah untuk mendapatkan nilai tinggi matahari, koreksi refraksi, koreksi paralaks, koreksi ½ diameter matahari, tinggi pusat matahari, dan deklinasi, dimana
4.3.1. Poligon Tertutup
Dari pengukuran poligon tertutup diperoleh data sebagai berikut :
- Sudut yang diukur adalah sudut dalam dengan menggunakan metode satu seri rangkap. - Jumlah sudut dalam adalah (n-2).180 = 540º00’00”, tetapi dalam pengukuran didapat
jumlah sudut dalam 539º59’32.5”, jadi kesalahan sudut yang harus dikoreksi sebesar 00º00’27.5”
- Dalam perhitungan data poligon, diperoleh ketelitian linier poligon 1 : 2005.63488 jadi ketelitian linier ini masuk dalam toleransi yang diberikan yaitu 1 : 2000
4.3.2. Pengukuran dan Perhitungan Sudut
Dalam pengukuran poligon tertutup ini, metode pengukuran sudut yang digunakan adalah metode pengukuran sudut satu seri ra
ngkap. Metode ini dimaksudkan supaya data sudut yang diperoleh dapat lebih akurat, karena mengurangi kesalahan yang disebabkan oleh tiga faktor yaitu kesalahan alat, manusia, dan alam. pengukuran dengan pengukuran 1 seri rangkap, yaitu dengan melakukan 4 kali pembacaan sudut horizontal biasa dan luar biasa sehingga didapatkan sudut dalam rata – rata, dan dihitung dengan rumus yang telah di bahas sebelumnya.
4.3.3. Pengukuran dan Perhitungan Jarak
Pada pengukuran jarak metode yang dipakai adalah metode pengukuran jarak langsung yaitu dengan mengukur jarak antara titik – titik poligon denganmenggunakan roll meter. Untuk mendapatkan data pengukuran jarak langsung yang akurat maka :
dimaksudkan untuk mengurangi kesalahan jarak. Dan rumus hitungannya sebagai berikut:
d rata-rata = (d pengukuran pergi +d pengukuran pulang) / 2
2. Bila jarak yang diukur antara titik poligon yang satu dengan titik poligon berikutnya terlalu panjang untuk dilakukan memakai roll meter, bisa dilakukan cara pelurusan dengan membagi dua atau lebih antara kedua titik tersebut selama masih bisa diukur memakai roll meter. Sehingga jarak yang didapat adalah dP1-P2 = d1 + d2 + … + dn 3. Roll meter harus ditarik kencang untuk mengurangi lendutan, tetapi jangan ditarik
terlalu kencang, karena roll meter akan molor, dan akibatnya terjadi penambahan jarak sebenarnya.
BAB V PENUTUP 5.1. KESIMPULAN
Ketelitian linier poligon ditentukan oleh jarak yang dipakai untuk pengukuran,makin teliti jarak ketelitian linier maka poligon makin teliti.
Kesalahan jarak yang dapat terjadi : a. Pelurusan kurang baik
b. Kelengkungan pita rol meter
c. Kesalahan pengiraan/pembacaan pada rol meter d. Kesalahan pembacaan rambu
Terjadinya penyimpangan beda tinggi antara titik awal pengukuran dan titik awal pengukuran dan titik akhir pengukuran pada poligon tertutup disebabkan oleh :
a. Kesalahan pengiraan/pembacaan bacaan pada rambu ukur b. karena refraksi atmosfir
c. tidak tegaknya rambu ukur pada saat pembacaan
Dengan melihat garis kontur dapat diketahui kondisi suatu daerah, misal :
pembuktian, lembah, ataupun sungai.garis kontur juga dapat membantu pekerjaan teknik seperti pembangunan bendungan,jalan dan lain-lain.
Kesalahan dan hambatan dalam melakukan pengukuran/pekerjaan lapangan adalah : a. Kurang teliti dalam mengambil data di lapangan
b. Alat yang dipakai tidak dikoreksi dengan baik c. Keadaan alam dan cuaca yang kurang mendukung 5.2 SARAN
1. Sebelum melakukan pengukuran, sebaiknya diadakan survey lokasi yang akan diukur. 2. Gunakan alat yang sesuai dengan kegunaanya serta memenuhi syarat.
3. Persiapkan formulir ukur dan alat yang lain yang diperlukan dalam pengukuran di lapangan.