BAB II
LANDASAN TEORI
2.1. Tinjauan Pustaka
2.1.1. Tinjauan Produk Pertama
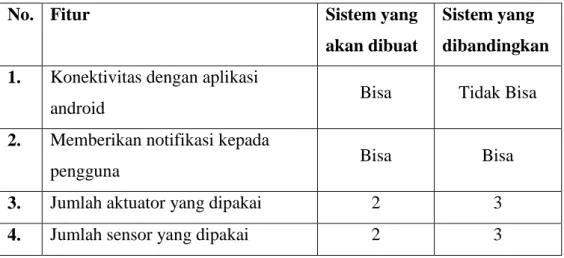
Aplikasi sejenis yang bertemakan sama dengan aplikasi yang penulis tuangkan adalah penelitian yang dilakukan Rahmat Naharu Yanuar, Mochammad Hannats Hanafi Ichsan dan Gembong Edhi Setyawan (2019) dengan judul
“Implementasi Sistem Pemadam Kebakaran Pada Ruang Tertutup Berbasis Arduino Menggunakan Logika Fuzzy” merupakan sistem yang mampu mendeteksi kebarakan dan memadamkan kebakaran berdasarkan indikasi suhu ruangan, kadar asap dan sumber api.
Tabel 2. 1 Perbandinan Fitur Tinjauan Produk Pertama
No. Fitur Sistem yang
akan dibuat
Sistem yang dibandingkan 1. Konektivitas dengan aplikasi
android Bisa Tidak Bisa
2. Memberikan notifikasi kepada
pengguna Bisa Bisa
3. Jumlah aktuator yang dipakai 2 3
4. Jumlah sensor yang dipakai 2 3
2.1.2. Tinjauan Produk Kedua
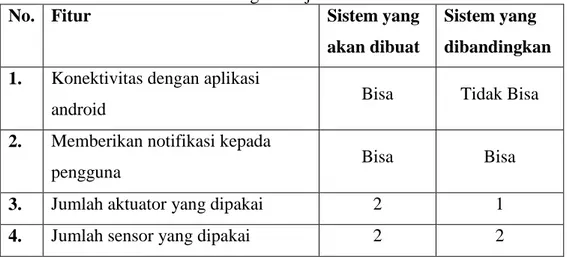
Kemudian dalam jurnal Muhammad Misfaul May Dana, Wijaya Kurniawan dan Hurriyatul Fitriah (2018) dengan judul “Rancang Bangun Sistem Deteksi Titik Kebakaran Dengan Metode Naive Bayes Menggunakan Sensor Suhu dan Sensor Api Berbasis Arduino” merupakan suatu prototype berbasis Android untuk mendeteksi titik api dengan menggunakan sensor LM35 dan metode Naive Bayes.
Tabel 2. 2 Perbandingan Tinjauan Produk Kedua
No. Fitur Sistem yang
akan dibuat
Sistem yang dibandingkan 1. Konektivitas dengan aplikasi
android Bisa Tidak Bisa
2. Memberikan notifikasi kepada
pengguna Bisa Bisa
3. Jumlah aktuator yang dipakai 2 1
4. Jumlah sensor yang dipakai 2 2
2.1.3. Tinjauan Produk Ketiga
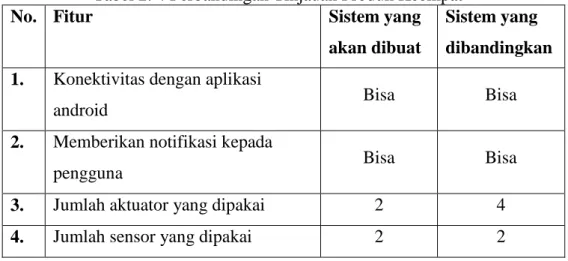
Beberapa penelitian telah dilakukan untuk menghasilkan alat untuk mendeteksi kebakaran. Muhammad Lazuardy membuat sistem pendeteksi kebocoran gas yang dapat membaca indikasi ketika terjadi kebakaran. Sistem tersebut menggunakan protokol komunikasi MQTT untuk mengkomunikasikan sensor api sebagai publisher dan buzzer sebagai subscriber.
Tabel 2. 3 Perbandingan Tinjauan Produk Ketiga
No. Fitur Sistem yang
akan dibuat
Sistem yang dibandingkan 1. Konektivitas dengan aplikasi
android Bisa Tidak Bisa
2. Memberikan notifikasi kepada
pengguna Bisa Bisa
3. Jumlah aktuator yang dipakai 2 3
4. Jumlah sensor yang dipakai 2 3
2.1.4. Tinjauan Produk Keempat
Jurnal yang ditulis oleh Achmad Farhan Farisi (2018) membuat alat pendeteksi kebakaran dini yang menggunakan sensor MQ2 sebagai pendeteksi asap dan LM35 sebagai pendeteksi suhu ruangan, alat ini menggunakan 4 aktuator
berupa pompa air, kipas, buzzer dan mengirimkan notitikasi ke pengguna melalui aplikasi android.
Tabel 2. 4 Perbandingan Tinjauan Produk Keempat
No. Fitur Sistem yang
akan dibuat
Sistem yang dibandingkan 1. Konektivitas dengan aplikasi
android Bisa Bisa
2. Memberikan notifikasi kepada
pengguna Bisa Bisa
3. Jumlah aktuator yang dipakai 2 4
4. Jumlah sensor yang dipakai 2 2
Berdasarkan penelitian tersebut menjadi referensi penulis untuk membuat tema tugas akhir “Prototype Robot Pemadam Kebakaran Berbasis Internet of Things”. Pada referensi sebelumnya prinsipnya sama yaitu pendeteksi kebakaran dengan menggunakan mikrokontroler. Penulis mencoba membuat robot pemadam kebakaran yang bisa mengirimkan notifikasi ke pengguna ketika terjadi kebakaran dan memonitoring suhu ruangan.
2.2. Landasan Teori 2.2.1. Internet
Internet merupakan media yang dapat dimanfaatkan dalam meningkatkan efisiensi kerja. Internet menyediakan berbagai fungsi dan fasilitas yang dapat digunakan sebagai suatu media informasi dan komunikasi yang canggih. (Hidayati et al., n.d.)
Internet adalah sebuah jaringan komputer yang saling terhubung dengan menggunakan suatu sistem standar global transmission control protocol/internet protocol suite (TCP/IP) yang digunakan sebagai protokol pertukaran paket dalam melayani miliaran pengguna yang terdapat di seluruh dunia. Internet merupakan kependekan dari interconnected network. Internet juga dapat diartikan sebagai jaringan komunikasi global yang terbuka dan menghubungkan jutaaan atau
milyaran jaringan komputer dengan berbagai tipe dan jenis, dengan menggunakan tipe komunikasi misalnya telepon, satelit, dan sebagainya.
Secara sederhana, fungsi internet adalah sebagai media komunikasi, sebagai salah satu tempat untuk akses informasi, untuk berbagi sumber daya atau data, untuk menyiarkan dan mengakses secara langsung baik itu berita dan bertukar data dengan internet online ke seluruh dunia.
2.2.2. Informasi
Informasi merupakan data atau fakta yang telah diproses sedemikian rupa, sehingga berubah bentuknya menjadi informasi. Di samping itu informasi dapat mengurangi ketidakpastian serta mempunyai nilai dalam keputusan karena dengan adanya informasi kita dapat memilih tinda- kan-tindakan dengan resiko yang paling kecil.
Untuk menghasilkan kebijaksanaan dan keputusan yang baik diperlukan pengo- lahan data menjadi informasi yang relevan dengan masalah perusahaan yang sedang dihadapi. Dengan demikian data itu merupakan bahan mentah yang harus diproses lebih dahulu baru kemudian dapat digunakan. Pengertian informasi adalah data yang telah diolah menjadi bentuk yang berarti bagi yang menerimanya dan bermanfaat dalam pengambilan keputusan saat ini dan saat mendatang. Data tidak dapat langsung digunakan untuk pengambilan keputusan, melainkan harus diolah lebih dahulu agar dapat dipahami, lalu dimanfaatkan dalam pengambilan keputusan.
Sistem informasi mengandung tiga aktivitas dasar di dalamnya, yaitu:
aktivitas masukan (input), pemrosesan (processing), dan keluaran (output). Tiga aktivitas dasar ini menghasilkan informasi yang dibutuhkan organisasi untuk pengambilan keputusan, pengendalian operasi, analisis permasala- han, dan menciptakan produk atau jasa baru. Masukan berperan di dalam pengumpulan bahan mentah (raw data), baik yang diperoleh dari dalam maupun dari lingkungan sekitar organisasi. Pemrosesan ber- peran untuk mengkonversi bahan mentah menjadi bentuk yang lebih memiliki arti. Sedangkan, keluaran dimaksudkan untuk mentransfer informasi yang diproses kepada pihak-pihak atau aktivitas aktivitas
yang akan menggunakan. Sistem informasi juga membutuhkan umpan balik (feedback), yaitu untuk dasar evaluasi dan perbaikan ditahap input berikutnya.(Anggadini, 2013)
2.2.3. Sistem
Sistem adalah himpunan dari unsur-unsur yang saling berkaitan sehingga membentuk suatu kesatuan yang utuh dan terpadu. (Mahaseptiviana, Tjandrarini, &
Sudarmaningtyas, 2014)
Sistem didefinisikan sebagai suatu perpaduan yang terdiri dari beberapa unsur/elemen yang dihubungkan menjadi satu kesatuan sehingga memudahkan aliran informasi dan materi/ energi untuk mewujudkan suatu tujuan tertentu.
Suatu sistem dibentuk oleh unsur-unsur tertentu. Setiap sistem terdiri dari empat unsur, yaitu pertama adalah objek, atribut, hubungan internal dan lingkunagan. Sedangkan elemen pembentuk suatu sistem dapat dibagi menjadi tujuh bagian, yaitu tujuan, masukan, proses, keluaran, batas, pengendalian serta umpan balik.
Kehidupan di dunia penuh dengan sistem, disekeliling manusia apa yang dilihat sebenarnya adalah kumpulan dari suatu sistem. Contohnya seperti penerimaan mahasiswa baru, sistem perkuliahan, sistem perekonomian, sistem bisnis, sistem transportasi dan sebagainya. Sistem adalah sekelompok elelmen- elemen yang terintegrasi dengan tujuan yang sama untuk mencapai tujuan.
2.2.4. Mikrokontroler
Mikrokontroler adalah sebuah chip yang berfungsi sebagai pengontrol rangkaian elektronik dan umunya dapat menyimpan program didalamnya. Mikrokontroler adalah sebuah chip yang berfungsi sebagai pengontrol rangkaian elektronik dan umunya dapat menyimpan program did umumnya terdiri dari CPU (Central Processing Unit), memori, I/O tertentu dan unit pendukung seperti Analog-to-Digital Converter (ADC) yang sudah terintegrasi di dalamnya.
(Thomas Suwanto, Titilianty Imbang, 2016)
Mikrokontroler pada dasarnya adalah komputer dalam satu chip, yang di dalamnya terdapat mikroprosesor, memori, jalur Input/Output (I/O) dan perangkat pelengkap lainnya. Kecepatan pengolahan data pada mikrokontroler lebih rendah jika dibandingkan dengan PC. Pada PC kecepatan mikroprosesor yang digunakan saat ini telah mencapai orde GHz, sedangkan kecepatan operasi mikrokontroler pada umumnya berkisar antara 1 – 16 MHz. Begitu juga kapasitas RAM dan ROM pada PC yang bisa mencapai orde Gbyte, dibandingkan dengan mikrokontroler yang hanya berkisar pada orde byte/Kbyte. Meskipun kecepatan pengolahan data dan kapasitas memori pada mikrokontroler jauh lebih kecil jika dibandingkan dengan komputer personal, namun kemampuan mikrokontroler sudah cukup untuk dapat digunakan pada banyak aplikasi terutama karena ukurannya yang kompak.
Mikrokontroler sering digunakan pada sistem yang tidak terlalu kompleks dan tidak memerlukan kemampuan komputasi yang tinggi.
2.2.5. Internet of Things
IoT (Internet of Things) merupakan suatu konsep yang bertujuan untuk memperluas manfaat dari konektivitas internet yang tersambung secara terus menerus. IoT (Internet of Things) dapat dimanfaatkan pada rumah sebagai smart home untuk mengendalikan peralatan elektronik yang dapat dioperasikan dengan aplikasi smart phone melalui koneksi internet (WiFi). (Hidayati et al., n.d.)
Cara Kerja IoT (Internet of Things) adalah interaksi antara sesama mesin yang terhubung secara otomatis tanpa campur tangan user dan dalam jarak berapa pun. Agar tercapainya cara kerja IoT (Internet of Things) tersebut diatas internet menjadi penghubung di antara kedua interaksi mesin tersebut, sementara user hanya bertugas sebagai pengatur dan pengawas bekerjanya alat tersebut secara langsung.
Manfaat yang didapatkan dari konsep IoT (Internet of Things) ialah pekerjaan yang dilakukan bisa menjadi lebih cepat, mudah dan efisien.
Secara singkat dapat dikatakan Internet of Things adalah dimana benda- benda di sekitar kita dapat berkomunikasi antara satu sama lain melalui sebuah jaringan seperti internet.
2.2.6. Usecase Diagram
Use case diagram merupakan pemodelan untuk kelakukan (behavior) sistem informasi yang akan dibuat. Use case mendeskripsikan sebuah interaksi antara satu atau lebih aktor dengan sistem informasi yang akan dibuat. Dapat dikatakan use case digunakan untuk mengetahui fungsi apa saja yang ada di dalam system informasi dan siapa saja yang berhak menggunakan fungsi-fungsi tersebut.(Urva &
Siregar, 2015)
Use Case merupakan sebuah teknik yang digunakan dalam pengembangan sebuah software atau sistem informasi untuk menangkap kebutuhan fungsional dari sistem yang bersangkutan, Use Case menjelaskan interaksi yang terjadi antara
‘aktor’ inisiator dari interaksi sistem itu sendiri dengan sistem yang ada, sebuah Use Case direpresentasikan dengan urutan langkah yang sederhana.
Perilaku sistem adalah bagaimana sistem beraksi dan bereaksi. Perilaku ini merupakan aktifitas sistem yang bisa dilihat dari luar dan bisa diuji. Perilaku sistem ini dicapture di dalam Use Case. Use Case sendiri mendeskripsikan sistem, lingkungan sistem, serta hubungan antara sistem dengan lingkungannya.
2.2.7. Activity Diagram
Activity Diagram atau Diagram aktivitas adalah bentuk visual dari alur kerja yang berisi aktivitas dan tindakan, yang juga dapat berisi pilihan, atau pengulangan.
Dalam UML (Unified Modeling Language), diagram aktivitas dibuat untuk menjelaskan aktivitas komputer maupun alur aktivitas dalam organisasi. Selain itu diagram aktivitas juga menggambarkan alur kontrol secara garis besar.
Diagram aktivitas memiliki komponen dengan bentuk tertentu, dihubungan dengan tanda panah. Panah tersebut mengarahkan urutan aktivitas yang terjadi, dari awal sampai akhir. Yang perlu diperhatikan yaitu diagram aktivitas bukan menggambarkan aktivitas sistem yang dilakukan aktor, tetapi menggambarkan aktivitas yang dapat dilakukan oleh sistem.
Activity diagram pada beberapa waktu dianggap sama seperti flowchart (diagram alur), namun meskipun diagram terlihat seperti sebuah diagram alur,
tetapi sebenarnya berbeda. Activity diagram menunjukkan aliran yang berbeda seperti paralel, bercabang, bersamaan dan tunggal.
2.2.8. Flowchart
Flowchart adalah adalah suatu bagan dengan simbol-simbol tertentu yang menggambarkan urutan proses secara mendetail dan hubungan antara suatu proses (instruksi) dengan proses lainnya dalam suatu program.
Flowchart Sistem merupakan bagan yang menunjukkan alur kerja atau apa yang sedang dikerjakan di dalam sistem secara keseluruhan dan menjelaskan urutan dari prosedur-prosedur yang ada di dalam sistem. Dengan kata lain, flowchart ini merupakan dekripsi secara grafik dari urutan prosedur-prosedur yang terkombinasi yang membentuk suatu sistem.
Flowchart Sistem terdiri dari data yang mengalir melalui sistem dan proses yang mentransformasikan data itu. Data dan proses dalam flowchart sistem dapat digambarkan secara online (dihubungkan langsung dengan komputer) atau offline (tidak dihubungkan langsung dengan komputer, misalnya mesin tik, cash register atau kalkulator).
2.2.9. Arduino Mega 2560 Pro Mini
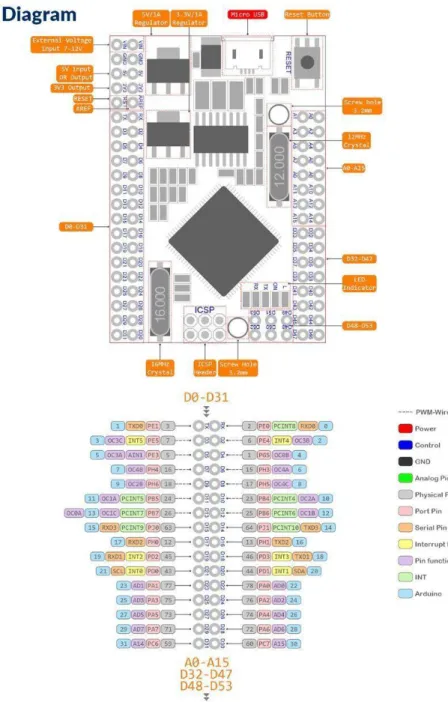
Arduino Mega 2560 Pro Mini adalah board mikrokontroler yang berbasis Arduino dengan menggunakan chip ATmega2560. Board ini memiliki pin I/O yang cukup banyak, sejumlah 54 buah digital I/O. Dimana 14 pin digunakan untuk PWM output dan 16 pin digunakan sebagai analog input, 4 pin untuk UART, 16 MHz osilator kristal, koneksi USB dan tombol reset. Adapun Pin Out dari Arduino Mega 2560 Pro Mini dapat dilihat pada Gambar 2.1
Gambar 2.1 Pinout Arduino Mega 2560 Pro Mini
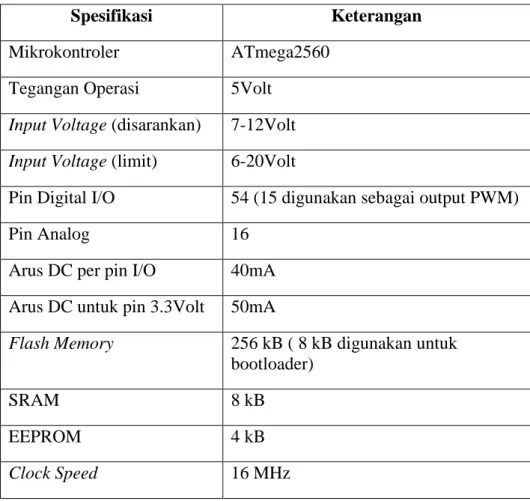
Tabel 2.5 Spesifikasi Arduino Mega 2560 Pro Mini
Spesifikasi Keterangan
Mikrokontroler ATmega2560
Tegangan Operasi 5Volt Input Voltage (disarankan) 7-12Volt Input Voltage (limit) 6-20Volt
Pin Digital I/O 54 (15 digunakan sebagai output PWM)
Pin Analog 16
Arus DC per pin I/O 40mA Arus DC untuk pin 3.3Volt 50mA
Flash Memory 256 kB ( 8 kB digunakan untuk bootloader)
SRAM 8 kB
EEPROM 4 kB
Clock Speed 16 MHz
2.2.10. Modul NodeMCU ESP8266
NodeMCU adalah sebuah board elektronik yang berbasis chip ESP8266 dengan kemampuan menjalankan fungsi mikrokontroler dan juga koneksi internet (WiFi). Terdapat beberapa pin I/O sehingga dapat dikembangkan menjadi sebuah aplikasi monitoring maupun controlling pada proyek IOT. NodeMCU ESP8266 dapat diprogram dengan compiler-nya Arduino, menggunakan Arduino IDE.
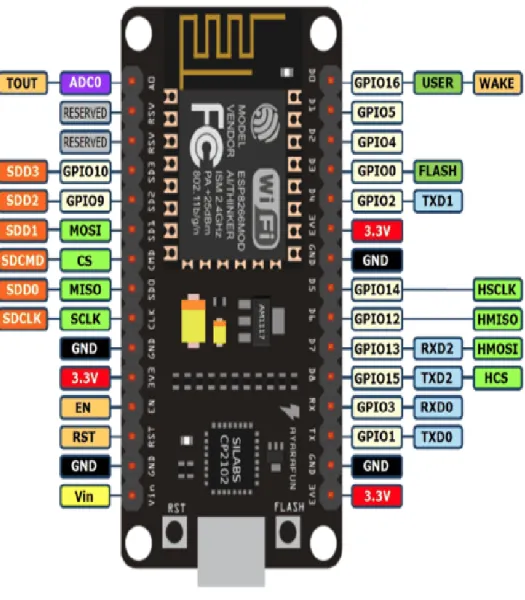
Bentuk fisik dari NodeMCU ESP 8266, terdapat port USB (mini USB) sehingga akan memudahkan dalam pemrogramannya. (Hidayati et al., n.d.). Adapun Pinout dari NodeMCU ESP8266 dapat dilihat pada Gambar 2.2
Gambar 2. 2 Pinouut ESP8266 NodeMCU
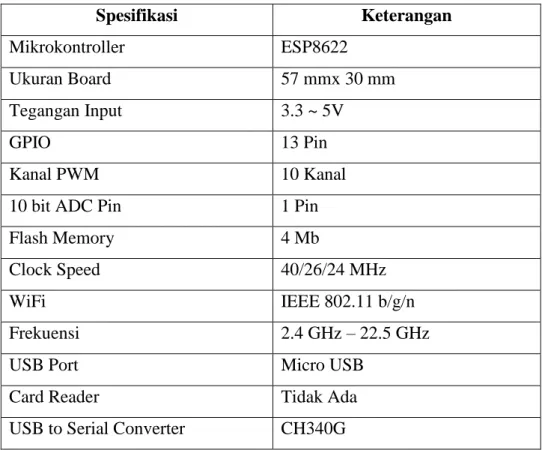
Tabel 2.6 Spesifikasi NodeMCU V3
Spesifikasi Keterangan
Mikrokontroller ESP8622
Ukuran Board 57 mmx 30 mm
Tegangan Input 3.3 ~ 5V
GPIO 13 Pin
Kanal PWM 10 Kanal
10 bit ADC Pin 1 Pin
Flash Memory 4 Mb
Clock Speed 40/26/24 MHz
WiFi IEEE 802.11 b/g/n
Frekuensi 2.4 GHz – 22.5 GHz
USB Port Micro USB
Card Reader Tidak Ada
USB to Serial Converter CH340G
2.2.11. Sensor Ultrasonic
Sensor HC-SR04 adalah sensor pengukur jarak berbasis gelombang ultrasonik. Prinsip kerja sesnsor ini mirip dengan radar ultrasonik. Gelombang ultrasonik di pancarkan kemudian di terima balik oleh receiver ultrasonik. Jarak antara waktu pancar dan waktu terima adalah representasi dari jarak objek. Sensor ini cocok untuk aplikasi elektronik yang memerlukan deteksi jarak termasuk untuk sensor pada robot.
Tabel 2.7 Spesifikasi Sensor HC-SR04
Spesifikasi Keterangan
Jarak deteksi terdekat sensor 2 cm – 450 cm Sudut deteksi sensor < 15 derajat Tegangan kerja sensor 5 volt Tingkat keakuratan sensor up to 0.3 cm
2.2.12. Sensor Api
Sensor api pada proyek akhir ini menggunakan Sensor Api KY-026. Sensor KY-026 adalah alat optik yang digunakan untuk mendeteksi nyala api dengan menggunakan sensor optik. Sensor api digunakan untuk mendeteksi keberadaan api, bukan panas. Api akan bisa dideteksi oleh keberadaan spektrum cahaya inframerah maupun ultraungu dan 11 mikroprosessor dalam sensor api akan bekerja untuk membedakan spektrum cahaya yang terdapat pada api yang terdeteksi tersebut. Prinsip kerja dari alat ini adalah mendeteksi radiasi inframerah atau ultraungu dari api yang menyala. Sensor api bekerja mendeteksi inframerah pada area yang diproteksi.
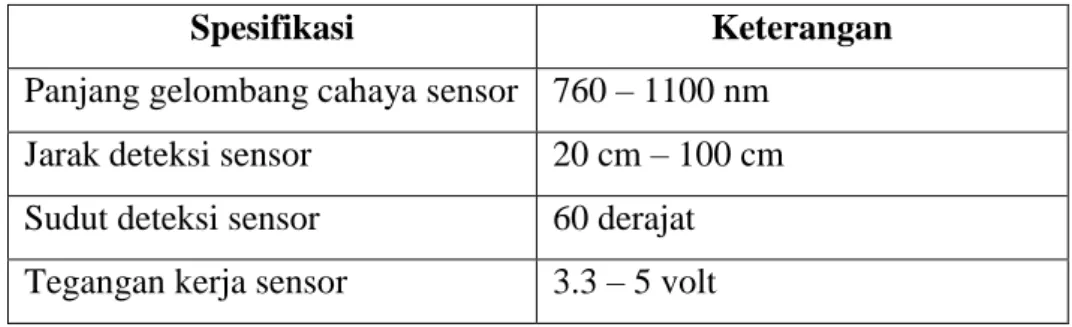
Tabel 2.8 Spesifikasi Sensor KY – 026
Spesifikasi Keterangan
Panjang gelombang cahaya sensor 760 – 1100 nm Jarak deteksi sensor 20 cm – 100 cm Sudut deteksi sensor 60 derajat Tegangan kerja sensor 3.3 – 5 volt
2.2.13. Servo Motor
Servo Motor adalah sebuah motor DC yang didalamnya terdapat sebuah sistem kendali close feedback. Servo Motor sendiri terdiri dari motor DC, rangkaian gear, dan potensiometer. Potensiometer berfungsi sebagai penentu batas maksimum putaran motor servo. Sedangkan sudut dari sumbu servo motor diatur berdasar lebar pulsa pada pin kontrol servo motor. Servo Motor mampu bergerak dua arah atau CW dan CCW, dimana arah dari putaran servo dapat dikendalikan dengan memberi variasi lebar pulsa pada sinyal PWM (Pulse Width Modulation) di pin kontrolnya.
Servo Motor memiliki dua jenis servo yaitu servo standart dan continuous, pada servo standart bergerak dua arah CW dan CCW dengan tiap arahnya mencapai 90º sehingga total sudutnya menjadi 180º ( CW 90º dan CCW 180º). Sedangkan
pada servo continuous dapat bergerak dengan dua arah CW dan CCW namun tanpa batasan sudut, sehingga dapat berputas secara continuous ( terus menerus ).
Tabel 2.9 Spesifikasi Servo Motor
Spesifikasi Keterangan
Torsi 1,6 kg/cm
Kecepatan putaran 0,12 detik / 60 derajat
Tegangan kerja 4,8 - 6 volt
2.2.14. Driver Motor L298N
Driver motor L298N merupakan module driver motor DC yang paling banyak digunakan atau dipakai di dunia elektronika yang difungsikan untuk mengontrol kecepatan serta arah perputaran motor DC. IC L298 merupakan sebuah IC tipe Hbridge yang mampu mengendalikan beban-beban induktif seperti relay, solenoid, motor DC dan motor stepper. Pada IC L298 terdiri dari transistor- transistor logik (TTL) dengan gerbang nand yang berfungsi untuk memudahkan dalam menentukan arah putaran suatu motor dc maupun motor stepper. Untuk dipasaran sudah terdapat modul driver motor menggunakan ic l298 ini, sehingga lebih praktis dalam penggunaannya karena pin I/O nya sudah terpackage dengan rapi dan mudah digunakan. Kelebihan akan modul driver motor L298N ini yaitu dalam hal kepresisian dalam mengontrol motor sehingga motor lebih mudah untuk dikontrol.
L298 adalah jenis IC driver motor yang dapat mengendalikan arah putaran dan kecepatan motor DC ataupun Motor stepper. Mampu mengeluarkan output tegangan untuk Motor dc dan motor stepper sebesar 50 volt. IC l298 terdiri dari transistortransistor logik (TTL) dengan gerbang nand yang memudahkan dalam menentukkan arah putaran suatu motor dc dan motor stepper. Dapat mengendalikan 2 untuk motor dc namun pada hanya dapat mengendalikan 1 motor stepper.
Penggunaannya paling sering untuk robot line follower. Bentuknya yang kecil memungkinkan dapat meminimalkan pembuatan robot line follower. Sesuai dengan namanya, Module L298N Dual H-Bridge Driver Motor ini berfungsi untuk
"mendrive" atau menyetir atau dengan kata lain mempermudah kita dalam urusan mengontrol motor DC menggunakan mikrokontroler.
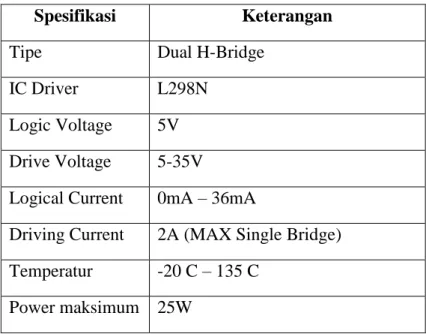
Tabel 2.10 Spesifikasi Driver Motor L298N
Spesifikasi Keterangan
Tipe Dual H-Bridge
IC Driver L298N
Logic Voltage 5V Drive Voltage 5-35V
Logical Current 0mA – 36mA
Driving Current 2A (MAX Single Bridge) Temperatur -20 C – 135 C
Power maksimum 25W
2.2.15. Modul Step Down LM2596
Modul stepdown LM2596 adalah modul yang memiliki IC LM2596 sebagai komponen utamanya. IC LM2596 adalah sirkuit terpadu (integrated circuit) yang berfungsi sebagai Step-Down DC Converter dengan current rating 3A. Terdapat beberapa varian dari IC seri ini yang dapat dikelompokkan dalam dua kelompok yaitu versi adjustable yang tegangan keluarannya dapat diatur dan versi fixed.
2.2.16. Motor DC
Motor DC adalah jenis motor listrik yang bekerja menggunakan sumber tegangan DC. Motor DC atau motor arus searah sebagaimana namanya, menggunakan arus langsung dan tidak langsung/direct-unidirectional. Motor DC digunakan pada penggunaan khusus dimana diperlukan penyalaan torque yang tinggi atau percepatan yang tetap untuk kisaran kecepatan yang luas.
Dalam membangun sebuah mobile robot, biasanya kita terkendala dengan chassis dan motor, terutama bila menggunakan motor DC. Bila menggunakan motor servo (continuous servo), karena bentuk fisiknya kotak maka lebih mudah menempatkannya pada chassis. Namun, motor servo umumnya memiliki kecepatan
yang rendah yakni 60 rpm saja. Pada motor DC yang digunakan untuk robot dipasangkan roda pada ke dua motor DC yang digunakan.
Motor Dc tidak dapat dkendalikan langsung menggunakan mikrokontroler karena kebutuhan arus yang besar, maka motor driver merupakan alternative yang dapat digunakan untuk menggerakan motor DC.
2.2.17. Baterai LiPo
Baterai merupakan sumber tegangan. Baterai yang digunakan adalah baterai lithium polymer (disingkat Li-poli, Li-Pol, LiPo, LIP, PLI atau Lip) termasuk baterai rechargeable yang di dalamnya terdiri atas beberapa sel identik jenis polimer kering yang di susun secara paralel untuk meningkatkan tampungan arus listrik.
kelebihan baterai ini adalah memiliki bobot yang ringan, memiliki kapasitas penyimpanan energi listrik yang besar dan tingkat discharge yang tinggi harus dibayar dengan umur pendek, usia pakai sekitar 300 - 400 kali siklus pengisian ulang.
2.2.18. Pengujian Black Box
Pengujian Black Box berfokus pada spesifikasi fungsional dari perangkat lunak. Tester dapat mendefinisikan kumpulan kondisi inpu dan melakukan pengetesan pada spesifikasi fungsional program. (Mustaqbal, Firdaus, & Rahmadi, 2015). Pengujian Black Box cenderung untuk menemukan hal-hal berikut :
1. Fungsi yang tidak benar atau tidak ada 2. Kesalahan antarmuka (interface errors)
3. Kesalahan pada struktur data dan akses basis data 4. Kesalahan performansi (performance errors) 5. Kesalahan inisialisasi dan terminasi