17
BAB III
METODE PENELITIAN
Penelitian ini dilakukan untuk menjawab permasalahan yang telah dirumuskan diatas yaitu menghasilkan model sistem pengendalian frekuensi beban pada PLTMH menggunakan kontroller Fuzzy PID yang ditala dengan ICA.
Tahapan penelitian yang akan dilakukan akan dijabarkan pada sub bab berikut : 3.1 Diagram Blok Sistem
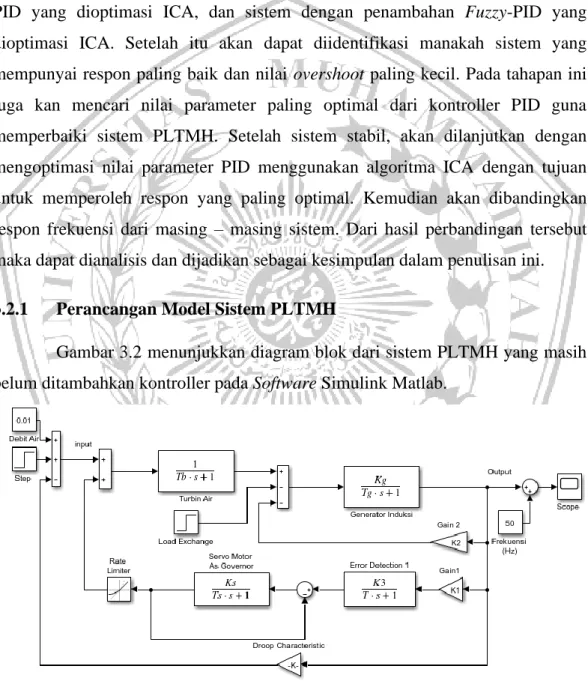
Secara garis besar penelitian ini ditunjukkan dengan diagram blok sistem pada Gambar 3.1 berikut.
Di dalam Gambar 3.1 tersebut menunjukkan, sinyal keluaran bagian penemuan nilai error berupa sinyal Δω akan dilanjutkan menuju bagian sistem governor berupa motor servo. Di dalam bagian ini terdiri dari parameter Ks dan Ts.
Lalu pada bagian keluaran dari motor servo terdapat sinyal yang dikembalikan kedalam nilai inputan motor servo itu lagi. Lalu nilai keluaran motor servo juga akan dilanjutkan menuju bagian rate limiter yang berperan sebagai pembatas sinyal saturasi tertinggi dan terrendah dari sinyal yang diharapkan. Kemudain nilai output rate limiter ini, dilanjutkan menjadi inputan pada bagian turbin air.
Pada diagram blok diatas terdapat beberapa parameter yang mewakili masing - masing bagian komponen dari PLTMH. Yang diawali dari input sistem yang berasal dari besarnya nilai debit air untuk bisa menggerakkan turbin air.
Kemudian pada blok Turbin Air yang diwakili oleh parameter Tb. Hasil keluaran Gambar 3.1 Diagram Blok Sistem PLTMH dengan Fuzzy PID-ICA
18 dari turbin air ini yaitu berupa daya mekanis akan menjadi masukan dari generator induksi. Kemudian sinyal keluaran dari generator induksi juga akan diteruskan menuju blok pendeteksi error, lalu diteruskan ke blok motor servo yang berfungsi sebagai governor. Pada blok ini terdapat parameter penguat pengatur governor (Ks) dan waktu konstanta (Ts). Lalu sinyal keluaran output governor diumpanbalikkan kembali menuju masukan pada governor tersebut. Juga ada yang diteruskan menuju rate limiter untuk menentukan batasan nilai saturasi paling rendah dan tinggi yang diinginkan, kemudian juga akan menjadi nilai masukan pada generator induksi. Kemudian terdapat sinyal keluaran yang diteruskan menuju Blok penguat K yang berfungsi sebagai pengkonversi dari sinyal frekuensi yang bersifat elektris menjadi nilai error yang bersifat mekanis sebagai nilai pembanding dari nilai masukan debit air, yang nantinya akan menjadi nilai masukan dari turbin.
Disamping parameter yang sudah ada ketentuannya, terdapat beberapa komponen tambahan, yaitu nilai masukan dari generator induksi yang didapatkan dari nilai perubahan beban dan penguat dari sinyal keluaran generator itu sendiri yang diumpanbalikkan ke dalam generator lagi. Sinyal input ini adalah bagian yang paling berperan dalam bagaimana sistem pengaturan frekuensi ini beroperasi. Nilai ini tidak bisa mempunyai nilai yang tetap dan dapat berubah-ubah, sesuai seberapa besar kecilnya beban daya listrik yang digunakan oleh konsumen. Kemudian ada droop characteristic yang berfungsi untuk memastikan antara unit pembangkit sudah memiliki beban yang seimbang. Biasanya penguat droop ini tersedia pada sistem governor berkecepatan tinggi [12].
Kemudian untuk memperbaiki respon frekuensi saat adanya perubahan beban yang terjadi, maka ditambahkan kontroller Fuzzy PID tertala ICA yang diletakkan pada keluaran generator induksi dan langsung diumpanbalikkan menuju masukan generator induksi kembali. Karena parameter yang dikendalikan adalah daya beban generator induksi dan tidak terikat dengan turbin air [12].
3.2 Pemodelan Sistem
Pada penelitian kali ini pemodelan dari PLTMH secara keseluruhan akan diimplementasikan dengan menggunakan software Simulasi MATLAB/SIMULINK. Simulasi pengaturan frekuensi dengan pengendali PID Fuzzy tertala Imperialist Competitive Algorithm (ICA) dimaksudkan untuk
19 mengetahui seberapa cepat respons pengendali terhadap perubahan beban yang terjadi.
Sesudah mendapatkan beberapa data yang diperlukan, selanjutnya akan dilanjutkan dengan perancangan sistem PLTMH dengan kontroller Fuzzy PID ke dalam bentuk persamaan linier. Lalu, akan dimodelkan sistem simulasi untuk mencocokkan dengan data yang didapatkan, antara lain : sistem sebelum penambahan kontroller, sistem dengan penambahan kontroller PID, sistem dengan PID yang dioptimasi ICA, dan sistem dengan penambahan Fuzzy-PID yang dioptimasi ICA. Setelah itu akan dapat diidentifikasi manakah sistem yang mempunyai respon paling baik dan nilai overshoot paling kecil. Pada tahapan ini juga kan mencari nilai parameter paling optimal dari kontroller PID guna memperbaiki sistem PLTMH. Setelah sistem stabil, akan dilanjutkan dengan mengoptimasi nilai parameter PID menggunakan algoritma ICA dengan tujuan untuk memperoleh respon yang paling optimal. Kemudian akan dibandingkan respon frekuensi dari masing – masing sistem. Dari hasil perbandingan tersebut maka dapat dianalisis dan dijadikan sebagai kesimpulan dalam penulisan ini.
3.2.1 Perancangan Model Sistem PLTMH
Gambar 3.2 menunjukkan diagram blok dari sistem PLTMH yang masih belum ditambahkan kontroller pada Software Simulink Matlab.
Gambar 3.2 Model PLTMH pada Software Simulink Matlab
20 Pada Gambar 3.2 terdapat beberapa komponen – komponen penting pada PLTMH yaitu turbin air, generator induksi, dan motor servo sebagai governor.
Sinyal Δω dari keluaran generator induksi akan diteruskan menuju blok pendeteksi error yang nantinya akan diteruskan menuju masukan motor servo. Kemudian keluaran motor servo ada yang diumpanbalikkan menuju masukan motor servo itu sendiri dan ada juga yang diteruskan pada blok Rate Limiter. Setelah itu akan masuk kedalam blok turbin air. Keluaran dari turbin air akan menjadi masukan dari generator induksi. Selain keluaran dari turbin air, ada juga perubahan beban dan keluaran dari generator yang sudah diberi penguatan, yang menjadi masukan pada genrator induksi. Selain itu juga terdapat penguatan droop karakteristik yang berfungsi untuk menyeimbangkan pembagian beban pada setiap unit pembangkit.
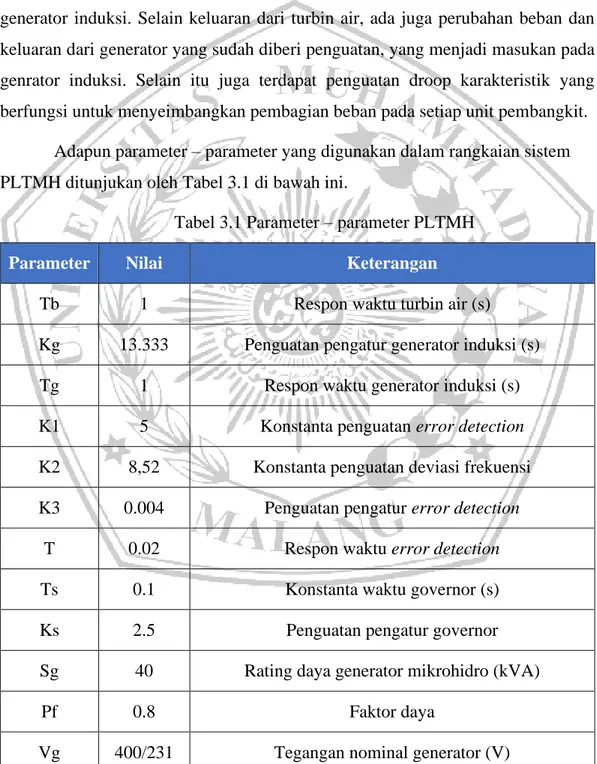
Adapun parameter – parameter yang digunakan dalam rangkaian sistem PLTMH ditunjukan oleh Tabel 3.1 di bawah ini.
Tabel 3.1 Parameter – parameter PLTMH
Parameter Nilai Keterangan
Tb 1 Respon waktu turbin air (s)
Kg 13.333 Penguatan pengatur generator induksi (s)
Tg 1 Respon waktu generator induksi (s)
K1 5 Konstanta penguatan error detection K2 8,52 Konstanta penguatan deviasi frekuensi K3 0.004 Penguatan pengatur error detection
T 0.02 Respon waktu error detection
Ts 0.1 Konstanta waktu governor (s)
Ks 2.5 Penguatan pengatur governor
Sg 40 Rating daya generator mikrohidro (kVA)
Pf 0.8 Faktor daya
Vg 400/231 Tegangan nominal generator (V)
21
ω 1500 Kecepatan rotasi nominal (rpm)
fg 50 Frekuensi nominal mikrohidro (Hz)
K 1/0.05 Gain Droop Karakteristik
3.2.2 Perancangan Model Kontroller Fuzzy
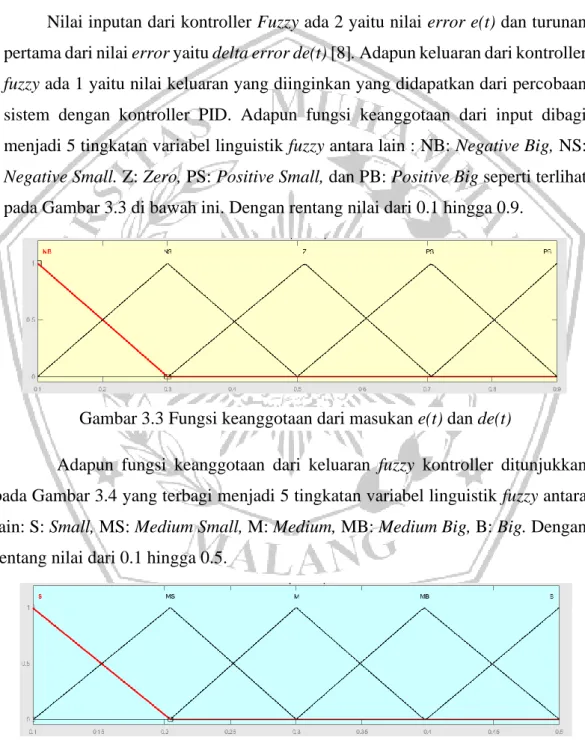
Nilai inputan dari kontroller Fuzzy ada 2 yaitu nilai error e(t) dan turunan pertama dari nilai error yaitu delta error de(t) [8]. Adapun keluaran dari kontroller fuzzy ada 1 yaitu nilai keluaran yang diinginkan yang didapatkan dari percobaan sistem dengan kontroller PID. Adapun fungsi keanggotaan dari input dibagi menjadi 5 tingkatan variabel linguistik fuzzy antara lain : NB: Negative Big, NS:
Negative Small. Z: Zero, PS: Positive Small, dan PB: Positive Big seperti terlihat pada Gambar 3.3 di bawah ini. Dengan rentang nilai dari 0.1 hingga 0.9.
Adapun fungsi keanggotaan dari keluaran fuzzy kontroller ditunjukkan pada Gambar 3.4 yang terbagi menjadi 5 tingkatan variabel linguistik fuzzy antara lain: S: Small, MS: Medium Small, M: Medium, MB: Medium Big, B: Big. Dengan rentang nilai dari 0.1 hingga 0.5.
Gambar 3.3 Fungsi keanggotaan dari masukan e(t) dan de(t)
Gambar 3.4 Fungsi keanggotaan dari keluaran Fuzzy Kontroller
22 3.2.3 Perancangan Model Sistem PLTMH dengan Kontroller PID – Fuzzy
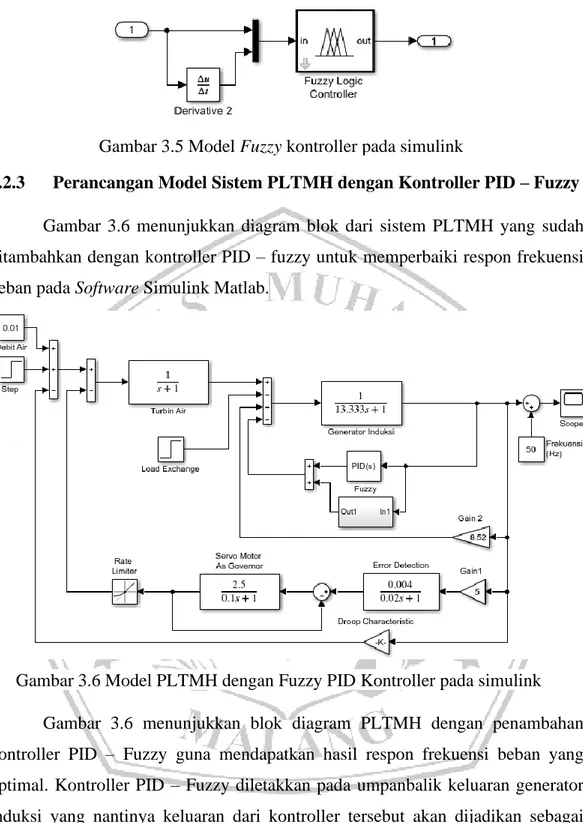
Gambar 3.6 menunjukkan diagram blok dari sistem PLTMH yang sudah ditambahkan dengan kontroller PID – fuzzy untuk memperbaiki respon frekuensi beban pada Software Simulink Matlab.
Gambar 3.6 menunjukkan blok diagram PLTMH dengan penambahan kontroller PID – Fuzzy guna mendapatkan hasil respon frekuensi beban yang optimal. Kontroller PID – Fuzzy diletakkan pada umpanbalik keluaran generator induksi yang nantinya keluaran dari kontroller tersebut akan dijadikan sebagai masukan pada generator induksi kembali dan tidak terikat dengan turbin air [12].
3.2.4 Imperialist Competitive Algorithm (ICA)
Sementara itu untuk mengoptimasi kinerja LFC, diusulkan algoritma optimasi berbasis Algoritma Genetika (GA) yaitu Imperialist Competitive
Gambar 3.6 Model PLTMH dengan Fuzzy PID Kontroller pada simulink Gambar 3.5 Model Fuzzy kontroller pada simulink
23 Algorithm (ICA). ICA merupakan perkembangan algoritma yang didapatkan dari proses kompetisi untuk meraih kekuasaan. Algoritma optimasi ICA ditemukan pada tahun 2007 pertama kali oleh Esmaeil Atashpaz. ICA menggambarkan keadaan politik sosial dari suatu penguasa dan kompetitifnya [1]. Adapun fungsi objektif yang dipakai yaitu dengan Integral Time Absolut Error (ITAE).
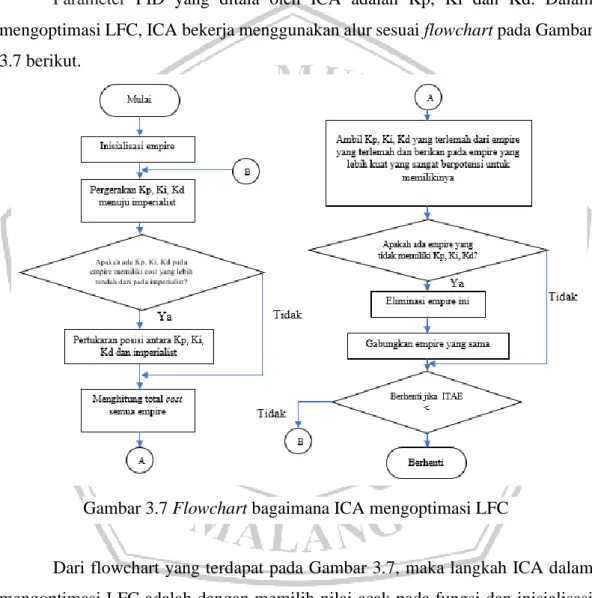
Parameter PID yang ditala oleh ICA adalah Kp, Ki dan Kd. Dalam mengoptimasi LFC, ICA bekerja menggunakan alur sesuai flowchart pada Gambar 3.7 berikut.
Dari flowchart yang terdapat pada Gambar 3.7, maka langkah ICA dalam mengoptimasi LFC adalah dengan memilih nilai acak pada fungsi dan inisialisasi empire. Lalu mengarahkan parameter Kp, Ki, Kd menuju imperialis yang sesuai.
Jika ada parameter Kp, Ki, Kd yang memiliki nilai paling baik dari imperialis, maka letak akan berubah yaitu dari parameter Kp, Ki, Kd tersebut dengan imperialis. Lalu menggabungkan empire yang sama. Kemudian menghitung total cost dari semua empire. Lalu mengambil parameter Kp, Ki, Kd paling baik dari empire terkecil dan menyerahkan kepada salah satu empire. Hapus empire yang terkecil. Apabila
Gambar 3.7 Flowchart bagaimana ICA mengoptimasi LFC
24 keadaan sama dengan yang diharapkan maka akan selesai, jika masih belum sama dengan yang diharapkan maka akan diarahkan ke proses 2. Dan juga dapat dilakukan menggunakan langkah yang berbeda, yaitu ketika hanya satu empire yang tersisa maka ICA akan selesai.
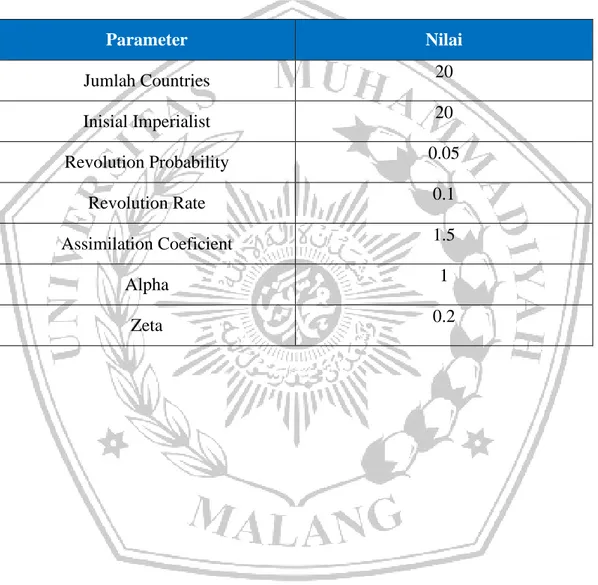
Adapun parameter – parameter ICA yang digunakan pada penelitian kali ini dapat ditunjukkan pada Tabel 3.2 di bawah ini.
Parameter Nilai
Jumlah Countries 20
Inisial Imperialist 20
Revolution Probability 0.05
Revolution Rate 0.1
Assimilation Coeficient 1.5
Alpha 1
Zeta 0.2
Tabel 3.2 Parameter ICA