VERTIKAL PADA HELIKOPTER DENGAN
PENGENDALI LOGIKA FUZZY
Diajukan untuk Memenuhi Salah Satu Syarat
Memperoleh Gelar Sarjana Teknik
Program Studi Teknik Elektro
Fakultas Sains dan Teknologi
Disusun oleh :
Sevriady
045114047
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
i
VERTIKAL PADA HELIKOPTER DENGAN
PENGENDALI LOGIKA FUZZY
Diajukan untuk Memenuhi Salah Satu Syarat
Memperoleh Gelar Sarjana Teknik
Program Studi Teknik Elektro
Fakultas Sains dan Teknologi
Disusun oleh :
Sevriady
045114047
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
ii
MOVEMENT WITH FUZZY LOGIC
CONTROLLER
Presented For Fulfilling One Of The Requirement To Obtain Engineer
Degree In Electrical Engineering Of Science And Technology Faculty
Sanata Dharma University
by :
Sevriady
045114047
ELECTRICAL ENGINEERING
SCIENCE AND TECHNOLOGY FACULTY
SANATA DHARMA UNIVERSITY
v
Saya menyatakan dengan sesungguhnya bahwa tugas akhir yang saya tulis
ini tidak memuat karya atau bagian karya orang lain, kecuali yang telah
disebutkan dalam daftar pustaka, sebagaimana layaknya karya ilmiah.
Yogyakarta, 30 Januari 2009
Penulis
vi
Selalu percaya dengan Tuhan
dan kemampuan diri sendiri.
Kupersembahkan Tugas Akhir Ini Untuk :
Tuhan yang Maha Mulia
Ayah dan Ibuku tercinta
Saudara-saudaraku yang terbaik
Dosen-dosen yang membimbingku
vii
control, namun untuk mempertahankan posisi ketinggian yang diinginkan pengguna tetap harus menekan panel pada remote control agar helikopter tetap berada pada ketinggian yang diinginkan. Hal ini menyebabkan pengguna tidak bisa lepas dariremote controlyang disediakan.
Pada perancangan tugas akhir ini, penulis merancang pemodelan helikopter yang dapat mempertahankan ketinggian yang diinginkan dengan beberapa pilihan level ketinggian. Pengaturan gerak vertikal pada model helikopter ini menggunakan kontroler berbasis logika fuzzy yang menggunakan mikrokontroler. LCD digunakan untuk menampilkan pilihan yang disediakan bagi pengguna.
Dari hasil pengujian dan analisa alat ini dapat mengendalikan ketinggian gerak vertikal helikopter dengan tingkat kesalahan yang tidak terlalu besar, yaitu kurang dari 5%.
viii
to hold high position, user has to keep pushing the remote control panel to hold the position. This cause, user can not move his hand from the remote control.
In this final project designing, the writer designed a helicopter modeling that can hold high position that match desire with several high level option. This helicopter vertical movement controller uses fuzzy logic controller based on ATmega32 microcontroller. LCD is used for showing the choices that available for user.
From test result and analyze, this device can control helicopter vertical movement with the error that is not too big, it’s less than 5%.
xii
Nama : Sevriady
Nomor Mahasiswa : 045114047
Demi pengembangan ilmu pengetahuan, saya memberikan kepada perpustakaan
Universitas Sanata Dharma karya ilmiah saya yang berjudul:
PENGENDALI SUHU AIR DISPENSER BERBASIS KONTROLER
LOGIKA FUZZY DENGAN MIKROKONTROLER ATMEGA32
beserta perangkat yang diperlukan (bila ada). Dengan demikian saya memberikan
kepada perpustakaan Universitas Sanata Dharma hak untuk menyimpan,
mengalihkan dalam bentuk media lain, mengelolanya dalam bentuk pangkalan
data, mendistribusikan secara terbatas, dan mempublikasikannya di internet atau
media lain untuk kepentingan akademis tanpa perlu meminta ijin dari saya
maupun memberikan royalti kepada saya selama tetap mencantumkan nama saya
sebagai penulis.
Demikian pernyataan ini yang saya buat dengan sebenarnya.
Dibuat di Yogyakarta
Pada tanggal : 23 Februari 2009
Yang menyatakan
ix
Puji dan syukur penulis panjatkan kepada Tuhan Yang Maha Esa atas
berkat dan rahmat-Nya sehingga penulis dapat menyelesaikan karya tulis berjudul
“Model Pengontrol Gerak Vertikal Pada Helikopter dengan Pengendali Logika
Fuzzy”.
Karya tulis ini merupakan salah satu syarat untuk memperoleh gelar
Sarjana Teknik pada Program Studi Teknik Elektro Universitas Sanata Dharma.
Penulisan skripsi ini didasarkan pada hasil-hasil yang penulis dapatkan selama
tahap perancangan, pembuatan dan pengujian alat.
Penulisan skripsi ini tidak terlepas dari bantuan berbagai pihak. Untuk itu,
penulis mengucapkan terima kasih kepada:
1. Kedua orang tua penulis yang telah memberikan semangat dan doa yang
tak pernah putus sehingga penulis dapat menyelesaikan tugas akhir ini.
2. Kakak dan adik yang telah memberikan dukungan untuk dapat
menyelesaikan tugas akhir ini.
3. Ibu B. Wuri Harini, S.T., M.T., selaku dosen pembimbing I karya tulis
yang telah bersedia meluangkan waktu, tenaga, dan pikirannya untuk
membimbing penulis.
4. Bapak Ir. Tjendro, selaku dosen pembimbing II karya tulis yang telah
bersedia meluangkan waktu, tenaga, dan pikirannya untuk membimbing
x Oksianus, Stevanus.
7. Rekan-rekan yang telah memberikan bantuan kepada penulis dalam
pengerjaan karya tulis ini: Tjin Yatmiko (TE’04), Hendri Paulus (TE’04),
Khiong Hin (TE’04), Suci Apsari (TE’04).
8. Rekan-rekan (TE’04) di laboratorium TA yang telah memberikan ide-ide
kepada penulis dalam pengerjaan karya tulis ini: Sumin, Yohanes Eko, Eri
Cahyono, Stenly Kadang, M.Taufik, Nova Budi, Tulus, Vendy Purnomo,
Trijoko, Yustin, Yuli.
9. Aryanto yang telah bersedia meminjamkan dasi pada ujian pendadaran dan
Setiawan, Sherly, Rani yang ikut memberikan semangat dalam
menyelesaikan penulisan tugas akhir ini.
10. Segenap dosen dan laboran Teknik Elektro Universitas Sanata Dharma.
11. Segenap karyawan sekretariat Fakultas Sains dan Teknologi.
12. Teman-teman mahasiswa jurusan Teknik Elektro dan semua pihak yang
tidak dapat disebutkan satu persatu atas setiap bantuannya.
Penulis menyadari bahwa masih banyak kelemahan dan kekurangan dari
penulisan karya tulis ini. Oleh karena itu segala kritik dan saran yang bersifat
xi
Yogyakarta, 24 Februari 2009
Penulis
xiii
HALAMAN JUDUL... i
HALAMAN JUDUL DALAM BAHASA INGGRIS... ii
LEMBAR PENGESAHAN PEMBIMBING...……….………. iii
LEMBAR PENGESAHAN PENGUJI... iv
LEMBAR PERNYATAAN KEASLIAN KARYA……….. v
MOTTO DAN PERSEMBAHAN……… vi
INTISARI...……….. vii
ABSTRACT.……… viii
KATA PENGANTAR... ix
LEMBAR PUBLIKASI... xii
DAFTAR ISI... xiii
DAFTAR GAMBAR... xvii
DAFTAR TABEL... xxi
DAFTAR LAMPIRAN... xxii
BAB I. PENDAHULUAN... 1
1.1 Judul... 1
1.2 Latar Belakang Masalah... 1
1.3 Tujuan dan Manfaat Penelitian... 3
1.4 Batasan Masalah... 3
xiv
2.1 Prinsip- prinsip Aerodinamika Helikopter……… 6
2.2 Ultrasonic Distance Sensor……….. 12
2.3 Mikrokontroller AVR Seri Atmega32... 15
2.3.1 Gambaran Umum... 15
2.3.2 Fitur- Fitur yang Terdapat Pada Atmega32... 15
2.3.3 Peta Memori... 17
2.3.4 Interupsi Eksternal... 17
2.3.5 Timer/Counter... 19
2.4 Driver Motor... 21
2.5 Sistem Kendali Fuzzy... 22
2.5.1 Himpunan Klasik (crisp)... 22
2.5.2 Logika Fuzzy... 23
2.5.3 Fusifikasi (fuzzification)... 24
2.5.4 Inferensi... 26
2.5.5 Komposisi... 28
2.5.6 Defusifikasi (defuzzification)... 28
2.5.7 LogikaFuzzydalam Teknik Kendali... 29
2.6 Mosfet Sebagai Saklar……….. 36
2.7 LCD (Liquid Crystal Display)... 37
xv
3.1 Diagram Blok... 43
3.2 Perancangan Perangkat Keras... 45
3.2.1 Driver Motor... 45
3.2.2 SensorUltrasonic... 46
3.2.3 PWM-Driver... 49
3.2.4 Perancangan Mosfet sebagai Switching………. 50
3.2.6 Antarmuka LCD dengan ATmega32... 50
3.2.5 Perancangan Rangkaian Non-Inverting... 51
3.2.7 Rangkaian Lengkap... 52
3.3 Perancangan Perangkat Lunak... 52
3.3.1 Diagram Alir Program Utama... 52
3.3.2 SubrutinFuzzy Logic Control... 53
3.3.3 PerancanganMembership... 54
3.3.4 Subrutin Output Data... 56
BAB IV HASIL DAN PEMBAHASAN... 57
4.1 Hasil Implementasi Sistem Pengendali Ketinggian Terbang Helikopter... 57
4.2 Pengujian Terhadap RangkaianNon-Inverting... 60
4.3 Hasil Pengujian Terhadap Penguat Daya... 61
xvi
BAB V KESIMPULAN DAN SARAN ... 75
5.1 Kesimpulan... 75
5.2 Saran... 75
DAFTAR PUSTAKA
xvii
1. Gambar 2-1 Gaya-gaya pada helikopter………... 7
2. Gambar 2-2 Rotor Berputar... 8
3. Gambar 2-3 Gaya angkat bilah helikopter (a) Gaya Angkat Kecil, (b) Gaya Angkat Sedang (c) Gaya Angkat Besar... 9
4. Gambar 2-4 Arah terbang helikopter (a) Helikopter Terbang Lurus, (b) Helikopter Berayun ke Sisi Kiri, (c) Helikopter Berayun ke Sisi Kanan... 10
5. Gambar 2-5 Sensor Ultrasonik... 12
6. Gambar 2-6 Sensor Ultrasonik………. 13
7. Gambar 2-7 Operasi Dasar SONAR………. 13
8. Gambar 2-8 Konfigurasi kaki sensor ultrasonic………... 15
9. Gambar 2-9 Register MCUCR... 17
10. Gambar 2-10 Register GICR... 18
11. Gambar 2-11 Register TCCR0………. 20
12. Gambar 2-12 Register TCCR2………. 20
13. Gambar 2-13 Rangkaiandrivermotor dc... 21
14. Gambar 2-14 Himpunan klasik rendah, standar, dan tinggi... 22
15. Gambar 2-15 Tahapan proses dalam logikafuzzy... 24
xviii
20. Gambar 2-20 Aturan-aturan kendali untuk pengendalifuzzy
sederhana secara umum... 32
21. Gambar 2-21Membership input errordengan 7membership(en)……. 33
22. Gambar 2-22Membership inputperubahanerrordengan 7 membership(Cen)……… 34
23. Gambar 2-23 Membership output dengan 7 membership (δu) ………... 34
24. Gambar 2-24 Proses fusifikasi, inferensi, dan komposisi (a) ProsesFuzzyfication, inferensi, dan komposisi, (b) Proses Fuzzyfication, inferensi, dan komposisi……… 35
25. Gambar 2-25 ProsesDefuzzyfication……… 36
26. Gambar 2-26 Mosfet sebagaiSwitching... 36
27. Gambar 2-27 Konstruksi LCD... 37
28. Gambar 2-28 LCD M1632... 38
29. Gambar 2-29 Hubungan antara DDRAM dan CGROM... 39
30. Gambar 2-30 Kurva tanggapan transient……….. 41
31. Gambar 2-31 PenguatNon-inverting……… 41
32. Gambar 3-1 Diagram Blok Rancangan………. 43
33. Gambar 3-2 Rancangan Blok Diagram Closed-loop Pengendali Kecepatan Motor DC... 44
xix
38. Gambar 3-7 Penguat daya dengan IRF740... 50
39. Gambar 3-8 Antarmuka LCD dengan ATmega32... 51
40. Gambar 3-9 Hasil perancangan Rangkaiannon-inverting………... 51
41. Gambar 3-10 Rangkaian lengkap perancangan perangkat keras... 52
42. Gambar 3-11 Diagram Alir Program Utama... 53
43. Gambar 3-12 Diagram alir subrutinfuzzy logic control... 54
44. Gambar 3-13Input error(e)………. 55
45. Gambar 3-14 Perubahanerror(Ce)……….. 55
46. Gambar 3-15Output………. 55
47. Gambar 3-16 Diagram alir subrutinoutputdata………... 56
48. Gambar 4-1 Bentuk plant yang digunakan... 57
49. Gambar 4-2 Rangkaian elektronis (a) rangkaian elektronis (b) Tombol PemilihSet Point……….. 58
50. Gambar 4-3 Tampilan LCD (a) tampilan LCD saat program dinyalakan, (b) tampilan LCD setelah 1 detik... 59
51. Gambar 4-4 Rangkaian pemilihset point……….. 59
52. Gambar 4-5 Tampilan LCD saat sp 40cm... 60
53. Gambar 4-6 Tampilan LCD saat sp melebihi 90 cm... 60
54. Gambar 4-7 RangkaianNon-Inverting... 61
xx
0 cm – 40 cm – 20cm... 65
59. Gambar 4-12 Grafik tanggapan sistem yang diberi gangguan untuk
pilihan 40 cm... 66
60. Gambar 4-13 Grafik tanggapan sistem yang diberi gangguan untuk
pilihan 60 cm... 67
61. Gambar 4-14 Grafik tanggapan sistem yang diberi gangguan untuk
xxi
1. Tabel 2-1 Spesifikasi Sensor Ultrasonik... 14
2. Tabel 2-2 Pengaturan yang Mengaktifkan Interupsi Eksternal 1... 18
3. Tabel 2-3 Pengaturan yang Mengaktifkan Interupsi Eksternal 2... 18
4. Tabel 2-4 Konfigurasi bit clock select untuk memilih sumber clock….. 20
5. Tabel 2-5 Konfigurasi bit clock select untuk memilih sumber clock….. 21
6. Tabel 2-6 Aturan-aturan kendalifuzzysecara umum... 33
7. Tabel 2-7 Aturan-aturan kendalifuzzysecara umum untuk 7
Membership... 34
8. Tabel 2-8 Konfigurasi kaki LCD... 39
9. Tabel 3.1 Data pengujian sensor... 48
10. Tabel 3.2 Data percobaan kecepatan motor... 49
11. Tabel 4.1 Hasil pengujian terhadap rangkaiannon-inverting... 61
12. Tabel 4.2 Hasil pengujian terhadap rangkaian penguat daya... 61
13. Tabel 4.3 Data td, tr, tp, ts denganset point40 cm -90 cm
dan 0cm-40cm-20cm……….……….. 65
xxii
1. LAMPIRAN DATA PENGUJIAN……….…. L1
2. LAMPIRAN RANGKAIAN LENGKAP ………... L2
3. LAMPIRAN DATASHEET ……….…….. L3
1 1.1 Judul
Model Pengontrol Gerak Vertikal Pada Helikopter dengan Pengendali
LogikaFuzzy
1.2 Latar Belakang Masalah
Di zaman yang semakin modern ini, serta dengan tingkat mobilitas
manusia dan barang yang semakin tinggi, maka sarana transportasi
memegang peranan yang sangat penting untuk memindahkan manusia dan
barang dengan cepat, aman dan nyaman dari tempat asal ke tempat tujuan.
Salah satu dari berbagai sarana transportasi udara adalah helikopter.
Helikopter mempunyai keunggulan dibandingkan dengan alat transportasi
yang lain. Keunggulan dari helikopter antara lain tepat waktu
pemberangkatan, praktis, hemat waktu, mempunyai jalur sendiri, dan
kecelakaan rata-rata relatif lebih rendah dibandingkan dengan sarana
transportasi yang lain. Selain itu, helikopter dapat terangkat lurus ke atas dan
mendarat kembali di titik yang sama [1].
Helikopter banyak digunakan untuk penerbangan ke daerah- daerah
kecil dan banyak digunakan juga dalam militer. Selain itu, tidak seperti
untuk lepas landas maupun mendarat, helikopter dapat lepas landas dan
mendarat di lapangan yang luas maupun di laut lepas [1].
Untuk melakukan penelitian gerakan-gerakan pada helikopter, maka
digunakan miniatur helikopter. Dengan adanya miniatur helikopter saat ini,
maka gerakan-gerakan vertikal dan horizontal helikopter dapat diatur. Dalam
hal ini, gerakan yang akan diatur adalah ketinggian terbang dari helikopter.
Kontroler yang akan digunakan untuk melakukan penelitian ini adalah
kontroler dengan logika fuzzy. Kelebihan yang dimiliki oleh kontroler ini
dibandingkan dengan kontroller lainnya adalah mudah diperbaiki serta
pengendalian yang lebih baik [8]. Saat ini logika fuzzy telah berhasil
menerobos kendala-kendala yang dulu pernah ditemui dan segera menjadi
basis teknologi tinggi. Penerapan teori logika ini dianggap mampu
menciptakan sebuah revolusi dalam teknologi. Sebagai contoh, mulai tahun
90-an para manufaktur industri yang bergerak di bidang Distributed Control
System (DCS), Programmable Logic Controllers (PLCs), dan
Microcontrollers Units (MCUs) telah menyatukan sistem logika fuzzy pada
barang produksi dan memiliki prospek ekonomi yang baik. Pada saat yang
bersamaan, pertumbuhan yang luar biasa terjadi pada industri perangkat lunak
yang menawarkan kemudahan penggunaan logikafuzzydan penerapan logika
fuzzypada setiap aspek kehidupan sehari-hari.
Pada penelitian ini, yang akan diatur adalah kecepatan putar motor
untuk mengatur ketinggian terbang. Penelitian untuk mengatur kecepatan
1.3 Tujuan dan Manfaat Penelitian
Tujuan dari penelitian ini adalah agar dapat menghasilkan Model
pengontrol gerak vertikal pada helikopter dengan pengendali logikaFuzzy.
Manfaat dari penelitian ini adalah agar dapat mempelajari
gerakan-gerakan helikopter
1.4 Batasan Masalah
Dalam perancangan alat ini, yang dijadikan pemikiran utama adalah
bagaimana mengontrol gerakan dari miniatur helikopter dengan
menggunakan mikrokontroller. Adapun batasan masalah yang digunakan
dalam perancangan ini adalah sebagai berikut:
a. Menggunakan kontroller Fuzzy dengan mikrokontroller AVR seri
ATMega32
b. Model yang digunakan adalah miniatur dari helikopter.
c. Aplikasi yang dikontrol adalah ketinggian terbang dari miniatur
helikopter.
d. Bahasa pemprogaman menggunakan AVR GCC bawaan dari AVR
studio4 dengan kompiler WinAVR.
e. Sistem mengontrol kecepatan putaran motor yang digunakan sebagai
penggerak rotor.
f. Input berupa nilai ketinggian yang diinginkan (set point).
g. Ketinggian terbang helikopter dibatasi antara 3cm sampai dengan
h. Sensor yang digunakan adalah sensor ultrasonik sebagai sensor
pengatur ketinggian.
1.5 Metode Penelitian
Metode yang digunakan dalam penelitian ini adalah mengumpulkan
sejumlah referensi atau literatur dari perpustakaan, internet dan sebagainya,
kemudian menyusun perancangan dan melakukan serangkaian percobaan
untuk merealisasikan perancangan.
Pengujian dilakukan dengan mencoba memberikan gangguan pada
sistem, mengambil data melalui sensor dan menganalisis bagaimana kontrol
fuzzymenangani gangguan yang diberikan.
Hasil yang ingin dicapai dari penelitian ini adalah menghasilkan suatu
kontroller fuzzy yang handal dan bisa memberikan pengendalian baik untuk
mengontrol kecepatan motor untuk mengatur ketinggian terbang.
1.6 Sistematika Penulisan
Tugas akhir ini memiliki sistematika penulisan sebagai berikut:
BAB I : PENDAHULUAN
BAB ini berisi latar belakang penelitian, tujuan dan manfaat penelitian,
batasan masalah, metodologi penelitian dan sistematika penulisan.
BAB II : DASAR TEORI
BAB ini berisi studi pustaka tentang landasan teori penelitian: ultrasonik,
BAB III : RANCANGAN PENELITIAN
BAB ini berisi tentang diagram blok perancangan, perancangan perangkat
keras (hardware) dan perancangan perangkat lunak (software) dari peralatan yang
akan dibuat.
BAB IV : HASIL DAN PEMBAHASAN
BAB ini berisi hasil perancangan perangkat keras, data hasil pengujian,
analisis data dan pembahasan.
BAB V: KESIMPULAN DAN SARAN
BAB ini berisi tentang kesimpulan akhir dan saran-saran penulis tentang
6 2.1 Prinsip- prinsip Aerodinamika Helikopter [1]
Helikopter tidak membutuhkan landasan pacu seperti pesawat terbang
karena helikopter dapat terangkat lurus ke atas dan mendarat kembali di titik
yang sama. Cara terbang helikopter sama dengan pesawat terbang, tetapi
helikopter hanya memutar bilah rotor agar dapat terangkat ke udara. Rotor
adalah komponen utama helikopter yang dibedakan atas main rotor (rotor
utama) dan tail rotor (rotor ekor). Main rotor berfungsi untuk menimbulkan
gaya angkat sekaligus gaya dorong agar didapatkan gerak maju bagi
helikopter. Sedangkan tail rotor berfungsi untuk mengimbangi torsi yang
ditimbulkan oleh putaran yang cenderung memutarkan helikopter pada sumbu
vertikal. Sehingga rotor belakang juga berfungsi untuk mengontrol arah
terbang helikopter.
Helikopter terbang dengan menggunakan prinsip yang sama dengan
peawat terbang. Alih-alih memiliki sayap, helikopter memiliki serangkaian
bilah yang berputar, yang disebut rotor, yang berputar dengan kecepatan tinggi
sehingga menciptakan gaya angkat. Rotor helikopter terdiri atas daun-daun
rotor (blades). Dalam keadaan tidak berputar, bila diamati, bentuknya mirip
dengan sayap pada pesawat bersayap tetap. Sayap maupun daun-daun rotor
ini dimaksud agar bidang angkat tersebut bila dilintasi udara dengan kecepatan
tertentu akan mudah menghasilkan reaksi aerodinamika berupa gaya angkat.
Ketika gaya angkat ini lebih besar daripada bobotnya, helikopter tersebut
dapat naik ke udara dan terbang.
Ketika berada di udara, pilot dapat mengurangi gaya angkat hingga
setara dengan bobot helikopter, dan helikopter tersebut dapat melayang di
udara. Jika gaya angkat tersebut dikurangi lebih banyak lagi sehingga gaya
angkatnya lebih kecil dibandingkan dengan bobot helikopter, maka helikopter
akan mulai turun ke tanah. Pilot juga dapat membelokkan bilah-bilah rotor
helikopter untuk membuatnya bergerak maju, mundur, dan menyamping.
Gaya yang menyebabkan gerakan ini disebut gaya dorong. Agar
helikopter daapat bergerak maju, gaya dorong tersebut harus lebih besar
daripada gaya yang ditimbulkan oleh efek tarikan udara di sekeliling pesawat
tersebut. Gaya ini disebut gaya tarikan. Gaya-gaya pada helikopter dapat
dilihat pada gambar 2-1.
Ketika rotor bergerak membelah udara, udara di bawahnya
mendorongnya ke atas, dan ini menyebabkan gaya angkat. Sayap pesawat
terbang bekerja dengan cara yang sama. Ini dapat dilihat pada gambar 2-2:
Gambar 2-2 . Rotor Berputar
Bilah-bilah rotor melengkung seperti sayap pesawat terbang. Tetapi,
sayap melekat pada pesawat terbang, sedangkan rotor berputar. Ketika
berputar, bilah rotor membuat udara yang mengalir di atasnya bergerak lebih
cepat daripada udara yang bergerak di bawahnya. Ini karena udara memiliki
jarak tempuh yang lebih jauh ketika bergerak di atas permukaan bagian atas
yang melengkung. Rotor terdiri atas 3 (tiga) komponen utama, yaitu :
1. poros rotor (rotor shaft) yang diputarkan oleh penggerak mula (engine)
melalui sistem transmisi (gear box);
2. perangkat mekanik atau rotor head yang menghubungkan rotor shaft
dengan daun rotor;
3. daun rotor, biasanya tiga atau lebih.
Udara yang bergerak cepat memiliki tekanan yang lebih rendah
lambat di bawah bilah tersebut mendorong ke atas melalui udara bertekanan
rendah yang mengalir lebih cepat. Inilah gaya angkat. Gaya angkat dapat
ditingkatkan dengan memiringkan bilah. Semakin besar sudut bilah, semakin
jauh pula jarak yang harus ditempuh udara di atasnya, sehingga udara tersebut
bergerak semakin cepat. Ini membuat gaya angkat menjadi lebih besar
dibanding sebelumnya. Gaya angkat yang mendorong rotor menarik helikopter
ke udara.
Bilah rotor bersudut besar membuat udara yang bergerak di atasnya
lebih tipis daripada udara yang bergerak di atas bilah tersebut kecil. Ini
mengakibatkan gaya angkat yang lebih besar. Gambar 2-3a, gambar 2-3b, dan
gambar 2-3c akan menunjukkan gaya angkat pada bilah rotor.
Gambar 2-3a. Gaya Angkat Kecil
Gambar 2-3c. Gaya Angkat Besar
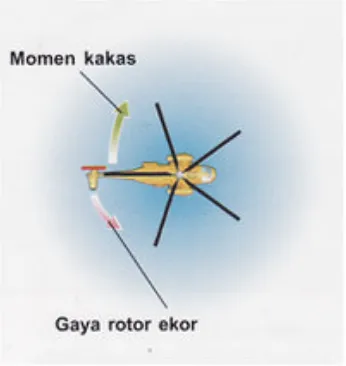
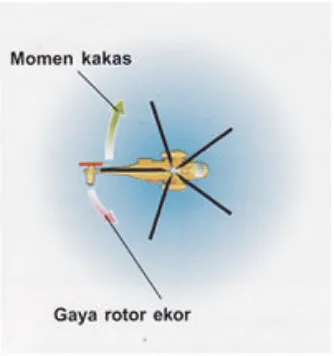
Ketika berputar, rotor menyebabkan semua bagian lain helikopter
berputar ke arah yang berlawanan. Gaya yang bekerja ini disebut momen
kakas. Agar badan helikopter tetap seimbang, sebagian besar helikopter
memiliki rotor kecil yang ditambahkan di bagian ekor yang disebut rotor ekor.
Rotor ekor yang berputar menghasilkan gaya yang menjaga badan helikopter
tetap diam. Rotor ekor juga digunakan untuk mengemudikan pesawat. Gambar
2-4a, gambar 2-4b, dan gambar 2-4c adalah contoh arah terbang dari
helikopter yang dikendalikan oleh rotor ekor helikopter.
Gambar 2-4b. Helikopter Berayun ke Sisi Kiri
Gambar 2-4c. Helikopter Berayun ke Sisi Kanan
Selain bergerak ke samping serta naik dan turun, setiap bilah rotor
dapat dimiringkan sehingga dapat mendatar atau miring. Ini disebut mengubah
kelandaian bilah. Berbeda dengan engsel tarikan dan engsel kepak, yang bebas
bergerak sendiri, kelandaian setiap bilah rotor dikendalikan oleh pilot.
Kelandaian bilah rotor pada helikopter sangatlah penting untuk mengubah
2.2 Ultrasonic Distance Sensor [2]
Gambar 2-5. SRF-04Ultrasonic Range Finder
Gambar 2-6. SRF-04Ultrasonic Range Finder
Ultrasonic atau SONAR ( Sound Navigation Ranging), bekerja
dengan memancarkan pulsa dari suara di atas batas pendengaran manusia,
biasanya sekitar 40 sampai 50KHz. Ultrasound biasa membagi
properti-propertinya dengan tipe-tipe lain dari gelombang-gelombang seperti sinar,
suara dan gelombang air, bisa dengan cara dipantulkan, dibiaskan atau
dibelokkan, dan disebarkan (diffracted). Diffraction adalah dimana arah dari
gelombang yang berjalan ketika melalui titik penting atau melewati bagian
yang kosong. Ini sangat penting terutama ketika jaraknya serupa atau panjang
untuk aplikasi jarak sejak lebar gelombangnya lebih kecil dari
7milimeter(mm), dan gelombang-gelombangnya sangat menunjukkan arah
sebagai hasil. Properti ini dapat digunakan pada peta daerah seperti pada
sebuah pelacak radar.
Ultrasonic memancarkan gelombang suara berupa pulsa dengan
kecepatan suara dari pemancar dalam bentuk kerucut, dan akan dipantulkan
kembali pada penerima jika sebuah objek berada dalam garis edar. Saat suara
dipancarkan oleh pemancar, kemudian akan menunggu suara yang dipantulkan
diterima oleh penerima. Jika mikrokontroler dipasangkan pada sensor, waktu
antara mengirim pulsa dan gema pulsa dapat digunakan untuk menentukan
seberapa jauh jarak benda dengan sensor. Proses ini dapat dilihat pada gambar
2-7:
Gambar 2-7. Operasi Dasar SONAR
Hal yang paling penting untuk diketahui adalah kecepatan suara ketika
berada di udara, pada level udara dan temperatur ruangan adalah sekitar 343
ini sangat mungkin berubah yang bergantung pada beberapa faktor, termasuk
ketinggian, temperatur, dan kelembaban.
Dengan kecepatan suara yang ditentukan, jika total waktu gelombang
suara antara pemancar dan penerima diketahui, kemudian ini semua
diperlukan untuk membagi waktu ( sejak dipancarkan dan diterima kembali )
dan dikali dengan kecepatan suara. Jadi,
2
time
V
range
sound (2.1)Bagaimanapun, formula ini hanya bekerja dimana jarak antara elemen
pemancar dan penerima sangat kecil. Sensor ultrasonic ini dapat mendeteksi
jarak dengan tepat. Sensor ini sangat mudah digunakan dengan hanya
menggunakan1 port inputdanoutput. Spesifikasi dari sensor ini dapat dilihat
pada tabel 2-1.
Sensor ini mempunyai 3 pin header yang digunakan untuk power
supply, ground, dan signal. Signal merupakan pin header yang digunakan
sebagai masukan trigger dan port input dan output. Konfigurasi kaki pada
sensor ultrasonik ini dapat dilihat pada gambar 2.8.
Gambar 2.8 Konfigurasi kaki sensor ultrasonik
2.3. Mikrokontroller AVR Seri Atmega8535 [3],[4]
2.3.1. Gambaran Umum
Mikrokontroller AVR Seri Atmega32 memiliki arsitektur Reduced
Instruction Set Computing (RISC) 8 bit, dimana semua instruksi dikemas
dalam kode 16-bit (16-bits word) dan sebagian intruksi dieksekusi dalam
satu siklusclock.
Kapabilitas detail dari Atmega32 adalah sebagai berikut :
a. Mikrokontroler AVR berkemampuan tinggi.
b. Didesain berdaya rendah dan semua operasi bersifat statis.
c. Memory flashsebesar 32K –bytes.
d. EEPROM sebesar 512bytes.
e. SRAMinternalsebesar 512bytes.
f. Dua buahtimer / counter8 – bit.
g. Satu buahtimer / counter16 – bit.
h. PWM (Pulse Width Modulation) sebanyak 4 (empat) kanal (channels).
i. ADC (Analog – to – Digital Converter)internal dengan fidelitas 10 –
bit sebanyak 8channels.
j. Portal komunikasi serial (USART)
k. Analog comparator internal.
l. Enam pilihan modesleeppenghemat penggunaan daya listrik.
m. Tegangan operasi 2,7-5,5V (untuk Atmega32) dan 4,5-5,5V (untuk
ATmega8535).
n. Kecepatan maksimal 16 MHz.
o. Antarmuka SPI.
p. Unit interupsi internal dan eksternal.
q. Saluran I/O sebanyak 32 buah, yaitu Port A, Port B, Port C dan Port D
2.3.3. Peta Memori
Pada sub bab ini akan dibahas tentang peta memori pada Atmega32.
Arsitektur AVR ini terbagi atas dua memori utama, yaitu program memori
dan data memori yang terpisah. Memori data terbagi menjadi 3 bagian, yaitu
32 buah register umum, 64 buah register I/O, yaitu $00 sampai $1F, dan 512
byteSRAMInternal.
2.3.4. Interupsi Eksternal
Interupsi adalah kondisi yang membuat CPU berhenti dari rutinitas
yang sedang dikerjakan (rutin utama) untuk mengerjakan rutin lain (rutin
interupsi). Di dalam AVR ATmega sendiri memiliki 21 sumber interupsi
internal dan eksternal
Pada AVR ini terdapat 3 masukan untuk interupsi eksternal, yaitu pin
INT0, INT1, dan pin INT2. Melihat itu, jika aktif, interupsi akan berjalan
bahkan jika pin INT2 dikonfigurasikan sebagaioutput( keluaran ). Interupsi
eksternal dapat dibangkitkan apabila terdapat perubahan logika 0 pada pin
interupsi. Pengaturan kondisi keadaan yang menyebabkan terjadinya
interupsi eksternal diatur oleh register MCUCR (MCU Control Register)
yang terlihat seperti gambar 2-9.
Berikut ini adalah tabel beberapa setting ( pengaturan ) yang
menyebabkan interupsi eksternal 1:
Tabel 2-2. Pengaturan yang Mengaktifkan Interupsi Eksternal 1
Berikut ini adalah tabel beberapa setting ( pengaturan ) yang
menyebabkan interupsi eksternal 2 aktif:
Tabel 2-3. Pengaturan yang Mengaktifkan Interupsi Ekternal 2
Pemilihan pengaktifan interupsi eksternal diatur oleh register GIRC
(General Interrupt Control Register) yang terlihat seperti gambar 2-10:
Bit penyusunnya dapat dijelaskan sebagai berikut :
a. Bit INT1 diaktifkan dengan diberi logika 1 makainterrupt eksternal
1 aktif.
b. Bit INT0 diaktifkan dengan diberi logika 1 makainterrupt eksternal
0 aktif.
c. Bit INT2 diaktifkan dengan diberi logika 1 makainterrupt eksternal
2 aktif.
2.3.5. Timer/Counter
Pada AVR Atmega32 ini, mempunyai 3 jenis timer/counter, yaitu
Timer / Counter0 (8 bit), Timer / Counter 1 (16 bit), Timer / Counter 2 (8
bit).
a. Timer / Counter0 (8 bit)
Fitur utama dari timer / counter 0 (8 bit) ini adalah:
1) Counter channeltunggal
2) Clear time on compare match
3) PWM
4) Pembangkit frekuensi
5) External event counter
6) 10 bitclock prescaler
7) Overflow and compare match interrupt sources
Pengaturan diatur oleh TCCR0 (Timer / Counter Control
Gambar 2-11. Register TCCR0
Tabel 2-4. Konfigurasi bit clock select untuk memilih sumber clock
CS02 CS01 CS00 Description
0 0 0 Timer / Counterberhenti (tidak aktif) 0 0 1 Clock tanpa prescaling
0 1 0 Clock/ 8 0 1 1 Clock/ 64 1 0 0 Clock/ 256 1 0 1 Clock/ 1024
1 1 0 Sumberclockberasal dari pin T0.clockdenganfalling edge
1 1 1 Sumberclockberasal dari pin T0.clockdenganrising edge
b. Timer / Counter(16 bit)
Berbagai dari fitur daritimer / counter1 adalah:
1). Desain 16 bit ( juga memungkinkan 16 bit PWM )
2). Dua buahcompareunit
3). Duaregisterpembanding
4). Satu buahinput capture unit
5). Timer dinolkan saatmatch compare
6). Dapat menghasilkan gelombang PWM denganglitch-free
7). Periode PWM dapat diubah-ubah
c. Timer / Counter2
Pengaturan Timer / Counter 2 diatur oleh TCCR2 ( Timer /
Counter Control Register 0) yang dapat dilihat pada gambar 2-12:
Tabel konfigurasi bitnya dapat dilihat pada tabel 2-5:
Tabel 2-5. Konfigurasi bit clock select untuk memilih sumber clock
CS22 CS21 CS20 Description
0 0 0 Timer / Counterberhenti (tidak aktif) 0 0 1 Clock tanpaprescaling
0 1 0 Clock/ 8 0 1 1 Clock/ 32 1 0 0 Clock/ 64 10 0 1 Clock/ 128
1 1 0 Clock/ 256 1 1 1 Clock/ 1024
2.4. Driver Motor [5], [7]
Rangkaian driver motor yang akan digunakan sebagai penggerak motor
dapat dilihat pada gambar 2-13. Driver yang digunakan merupakan aplikasi
dari rangkaiandarlington.
2.5 Sistem Kendali Fuzzy [6]
2.5.1. Himpunan Klasik (crisp)
Teori himpunanfuzzymerupakan perluasan dari teori himpunan klasik
/ himpunan tegas. Pada teori himpunan klasik, keberadaan suatu elemen
pada suatu himpunan A, hanya akan memiliki 2 kemungkinan keanggotaan,
yaitu menjadi anggota A atau tidak menjadi anggota A. Suatu nilai yang
menunjukkan seberapa besar tingkat keanggotaan suatu elemen (x) dalam
suatu himpunan (A), sering dikenal dengan nama nilai keanggotaan atau
derajat keanggotaan, dinotasikan dengan µA(x). Pada himpunan klasik,
hanya ada 2 derajat keanggotaan, yaitu µA(x)=1 untuk menjadi keanggotaan
A; dan µA(x)=0, untuk tidak menjadi anggota dari A.
Misalkan dimiliki variabel ketinggian terbang yang dibagi menjadi 3
kategori yaitu:
Rendah : ketinggian < 0,5 meter
Standar : 0,5 meter < ketinggian < 1,5 meter
Tinggi : ketinggian > 1,5 meter
Nilai keanggotaan secara grafis, himpunan Rendah, Standar, dan
Tinggi dapat dilihat pada gambar 2-14.
Pada gambar 2-14 dapat dilihat bahwa:
a. Apabila suatu ketinggian 0,5 meter maka ketinggian tersebut dikatakan
Rendah (µrendah(0,5) = 1)
b. Apabila suatu ketinggian 0,6 meter maka ketinggian tersebut dikatakan
TIDAK Rendah (µrendah(0,6) = 0)
c. Apabila suatu ketinggian 1,6 meter maka ketinggian tersebut dikatakan
TIDAK Standar (µstandar(1,6) = 0)
d. Apabila suatu ketinggian 1,6 meter maka ketinggian tersebut dikatakan
Tinggi (µtinggi(1,6) = 1)
Adanya perubahan kecil saja pada suatu nilai mengkibatkan perbedaan
kategori yang cukup signifikan, sehingga dapat dikatakan bahwa pemakaian
himpunan klasik untuk menyatakan suhu ruangan kurang bijaksana.
Apabila digunakan dalam suatu sistem kendali, misalkan untuk
mengendalikan kecepatan putaran motor, maka kecepatan putaran motor
akan berubah-ubah secara liar karena adanya perubahan kecil dari variabel
masukan ketinggian. Dengan kondisi yang demikian kendali fuzzy
menunjukkan kelebihan dari himpunan klasik.
2.5.2. LogikaFuzzy
Logika kabur (fuzzy) pertama kali diperkenalkan oleh Prof. Lotfi A.
Zadeh dari University of California di Berkeley pada tahun 1965. Logika
a. Tahap fusifikasi (fuzzification), yakni pemetaan dari masukan tegas ke
himpunanfuzzy.
b. Tahap inferensi, yakni pembangkitan aturanfuzzy.
c. Tahap komposisi, yakni mengkombinasikan output yang menyatakan
himpunanfuzzyke dalam sebuah himpunanfuzzy.
d. Tahap defusifikasi (defuzzification), yakni transformasi keluaran dari
nilai kabur ke nilai tegas.
Keempat tahapan logika fuzzy tersebut dapat digambarkan dalam
gambar 2-15.
Gambar 2-15. Tahapan proses dalam logikafuzzy
2.5.3. Fusifikasi (fuzzification)
Pada tahap fusifikasi, nilai masukan nyata terukur dipetakan ke dalam
fungsi keanggotaanfuzzy. Sebagai contoh, dalam bahasan berikut pengendali
ketinggian terbang dikembangkan dengan metode logikafuzzy.
Untuk membuat sistem kendali ketinggian terbang mula-mula
dikembangkan fungsi keanggotaan untuk variabel masukan
Fungsi keanggotaan ini didefinisikan dengan rentang nilai dan derajat
keanggotaan. Dalam logika fuzzy, penting untuk membedakan tidak
hanya dalam fungsi keanggotaan mana suatu variabel berada tetapi juga
derajat keanggotaan relatif variabel tersebut. Jadi tiap variabel memiliki
bobot keanggotaan dalam suatu fungsi keanggotaan.
Suatu variabel dapat memiliki memiliki bobot keanggotaan dalam
beberapa fungsi keanggotaan sekaligus pada suatu saat. Sebagai contoh,
fungsi keanggotaan "ketinggian_terbang" mungkin seperti gambar 2-16.
Gambar 2-16. Fungsi keanggotaan variabel masukan ketinggian_terbang
Seperti terlihat pada gambar 2-16, fungsi keanggotaan fuzzy memiliki
rentang nilai-nilai yang dapat saling tumpang-tindih. Dalam diagram
tersebut didefinisikan adanya tiga himpunan nilai keanggotaan untuk
variabel "ketinggian_terbang". Ketiga himpunan itu adalah Rendah, Standar,
dan Tinggi. Derajat keanggotaan suatu nilai tertentu, dalam diagram
horisontal dengan garis yang mendefinisikan satu atau lebih fungsi
keanggotaanfuzzy.
Titik perpotongan ini dinyatakan dengan nilai tertentu pada sumbu
tegak yang menentukan keanggotaan relatif nilai tersebut di dalam
himpunan nilai masukan nyata. Sebagai contoh, nilai 1,4 pada variabel
ketinggian_terbang adalah anggota dari fungsi keanggotaan Tinggi dengan
keanggotaan relatif 0.8. Nilai 1,4 tersebut juga termasuk dalam anggota dari
fungsi keanggotaan Standar dengan keanggotaan relatif 0.19.
Berbeda dengan sistem klasik, di mana suatu nilai secara tegas dapat
dinyatakan sebagai anggota atau bukan anggota dari suatu fungsi, sistem
logikafuzzy bekerja atas dasar keanggotaan dari suatu himpunan dan derajat
keanggotaan nilai tersebut untuk suatu fungsi keangggotaan tertentu. Dalam
kasus ini, karena ketinggian_terbang pada 1,4 meter adalah lebih kuat pada
posisi keanggotaan Tinggi (0.8) daripada Standar (0.19), maka pengendali
akan memperhitungkan derajat keanggotaan Tinggi tersebut dalam
menentukan aksi keluaran yang akan dilakukan.
2.5.4. Inferensi
Setelah fungsi keanggotaan untuk variabel masukan dan keluarannya
ditentukan, basis aturan pengendalian dapat dikembangkan untuk
menghubungkan aksi keluaran pengendali terhadap kondisi masukannya.
Tahap ini disebut sebagai tahap inferensi, yakni bagian penentuan aturan
aksi pengendali fuzzy. Contoh berikut ini, misalnya, dapat diperlakukan
untuk pengendali yang sedang dibahas.
Jika ketinggian_terbang Rendah, maka atur kecepatan_motor pada
posisi Lambat. Jika ketinggian terbang Tinggi, maka atur kecepatan_motor
pada posisi Cepat. Jika ketinggian terbang Standar, maka atur kecepatan
motor pada posisi Sedang.
Aturan jika-maka (if-then) tersebut dapat menghubungkan banyak
variabel masukan dan keluaran. Karena aturan didasarkan pada deskripsi
dengan kata-kata bukan dengan definisi matematis, maka semua hubungan
yang dapat dijelaskan dengan ungkapan bahasa pada umumnya dapat
dilakukan dengan pengendali logikafuzzy.
Hal ini berarti sistem non-linier yang biasanya sulit dikendalikan
dengan pengendali konvensional, dapat dengan mudah dikendalikan oleh
pengendali logika fuzzy. Karena variabel memiliki keanggotaan berbobot,
aturan yang terdiri atas variabel-variabel ini juga memiliki bobot. Untuk
sistem dengan banyak masukan dan banyak keluaran serta memiliki banyak
aturan, fluktuasi liar pada tiap-tiap masukan dapat ditekan dengan
pembobotan aturan.
Oleh karena itu sistem logika fuzzy bersifat sangat panggah (robust)
dan seringkali memungkinkan pengubahan atau pembuangan banyak aturan
2.5.5. Komposisi
Pada metode komposisi ini yang sering digunakan adalah max
(maximum). Dalam komposisi max, himpunanfuzzyuntuk outputditentukan
dengan mengambil titik maksimum dari semua himpunan fuzzy yang
dihasilkan oleh proses inferensi untuk masing-masing aturan.
2.5.6. Defusifikasi (defuzzification)
Setelah dilakukan evaluasi atas masukan, menerapkan basis aturan,
dan mengkomposisikan himpunan fuzzy, pengendali logika fuzzy
menghasilkan keluaran untuk diberikan kepada sistem yang
dikendalikannya. Pengendali logikafuzzy harus mengubah variabel keluaran
fuzzy menjadi nilai-nilai tegas yang dapat digunakan untuk mengendalikan
sistem. Proses ini disebut sebagai defusifikasi (defuzzification).
Atau dengan kata lain, defusifikasi adalah proses penegasan kembali
nilai kabur yang diperoleh. Ada banyak metode untuk melakukan
defusifikasi ini, salah satunya adalah metode defusifikasiheight.Metode ini
merupakan metode defusifikasi yang paling sederhana dan yang paling
cepat, metode ini menjumlahkan titik tengah dari setiap membership yang
tersulut, kemudian membaginya dengan jumlahan dari derajat (tinggi)
keanggotaan dari membership yang tersulut. U* adalah nilai tegas, C(k)
merupakan nilai tengah membership, dan fk merupakan nilai derajat dari
n
k k
k m
k k
f f C U
1 1 *
.
(2.4)
Sebagai contoh pada gambar 2-17 diperlihatkan hasil komposisi yang
akan di defusifikasi dengan metode Height. Pada gambar diperoleh derajat
dari membership yang tersulut sebut saja f1 dan f2 dan juga nilai tengah dari
membership yang tersulut yaitu C1 dan C2. Maka nilai defusifikasinya
adalah U*.
Gambar 2-17. Metode defusifikasi denganHeight
2.5.7. LogikaFuzzydalam Teknik Kendali
Dalam sub-bab ini dibahas tentang aplikasi logikafuzzydalam teknik
kendali. Bentuk logika fuzzy dasar adalah arsitektur Mamdani, di mana
pengendali secara langsung mengubah spesifikasi kinerja eksternal dan
sifat plant ke dalam bahasa berbasis aturan (rule). Arsitektur Mamdani
ini merupakan sistem kendali logika fuzzy yang paling banyak digunakan
kombinasi aturan-aturan bahasa dan fungsi linier untuk membentuk
strategi kendali logikafuzzy.
Asumsi dasar kendali logikafuzzyyang diajukan oleh E.H. Mamdani
pada tahun 1974 adalah tidak adanya model plant secara eksplisit.
Paradigma dasar kendali logika fuzzy Mamdani yang berbasis aturan
memetakan controlled variable (CV1, CV2, ...) dari plant dengan
manipulated variable (MV1, MV2, ...). Struktur pengendali yang
ditunjukkan dalam gambar 2-18, menghubungkan arsitektur ini dengan
sistem kendali umpan-balik konvensional.
Dalam setiapCV bisa secara langsung menjadi variabel terukur atau
beda antara variabel terukur tersebut dengan suatu nilai referensi yang
telah ditentukan yang merupakan error. Selain error juga diperlukan
masukan lain seperti perubahanerror( dt de
) yang digunakan dalampremise
aturan. Selain perubahan error, dalam kasus sistem kendali fuzzy untuk
implementasi waktu diskret digunakan CV e
t etT
dengan Tmerupakan periode cuplik sistem.
Secara umum, arsitektur sistem kendali fuzzy ditunjukkan dalam
gambar 2-22 yang memetakanerror,e = yd– yke dalam aksi pengendali,u.
Masukan Fuzzy Logic Controller (FLC) adalah error (e) dan perubahan
error (ce). Pengendalian dilakukan oleh FLC yang memetakan nilai error,
en(t), dan perubahanerrorternormalisasi, cen(t), yang dinyatakan sebagai
t ne
t en e
t n
e
t et T
cen ce (2.5)
dengan T adalah time step, ne dan nce adalah faktor normalisasi, ke dalam
perubahan aksi pengendaliδun(t) melalui aturan dalam bentuk:
Ifen(t) is P andcen(t) is N thenδun(t) is Z
P, N, Z merupakan kependekan dari positive, negativedan zero, yang
didefinisikan sebagaifuzzy setmelalui variabel-variabel yang relevan seperti
yang ditunjukkan dalam gambar 2-19.
Keluaran dari FLC adalah perubahan dari aksi kontrol. Untuk
memperoleh aksi kontrol u, perlu diintegralkan dan didenormalisasikan
dengan menggunakan faktor denormalisasi deδu, sehingga diperoleh nilai
aksi kontrol saat t, dimana nilai perubahan aksi kontrol ditambah dengan
nilaiusebelumnya, melalui rumus:
t u t T
de u
tGambar 2-19. Arsitektur umum sistem pengendalifuzzy
Aturan-aturan secara efektif menyatakan skenario operasi dari suatu
sistem, seperti yang ditunjukkan dalam gambar 2-20. Pada saatt= 0, sistem
mulai pada nilai output nominal tertentu (misalnya y = 0) dan diharapkan
mencapai nilai yang dinginkan yd. Pada skala ternormalisasi pada gambar
tersebut, yd menyatakan beda satu satuan dari nilai y ternormalisasi dan
menghasilkan nilai error awal. Keadaan awal ini (dalam gambar ditandai
dengan (0)) menyatakan bahwa error bernilai positif (P) dan perubahan
errorbernilai positif, sehinggaδunmenjadi positif.
Gambar 2-20. Aturan-aturan kendali untuk pengendalifuzzysederhana secara umum
Diasumsikan keluaran plant meningkat, output akan mencapai level
tetapi perubahan error negatif (N), sehingga δun menjadi zero (Z).
Aturan-aturan tambahan ditentukan dari inspeksi dan dapat dilihat dalam tabel 2-6.
Tabel 2-6. Aturan-aturan kendalifuzzysecara umum
error,en Atribut yang diamati
perubahanerror,cen Atribut yang dikendalikan perubahan input,δun Kondisi aturan aksi
Ifenis P andcenis P thenδunis P I. Mulai, input dalam tanggapan diubah ke
perubahansetpoint Ifenis N andcenis N thenδunis N Ifenis P andcenis Z thenδunis P II.Planttidak merespon; input disesuaikan
Ifenis N andcenis Z thenδunis N Ifenis P andcenis N thenδunis Z III. Tanggapan plant normal, input dijaga
tetap Ifenis N andcenis P thenδunis Z
IV. Mencapai kesetimbangan Ifenis Z andcenis Z thenδunis Z Ifenis Z andcenis N thenδunis N V. Error nol, tetapi ada perubahan,
lakukan aksi Ifenis Z andcenis P thenδunis P
Jika diinginkan sistem kendali fuzzy yang lebih baik dapat dilakukan
dengan menambahkan jumlah membership input maupun output dan juga
penambahan aturan-aturan yang baru, aturan-aturan yang baru dapat dilihat
pada table 2-7. Sedangkan gambar membership input dan output dapat
dilihat pada gambar 2-21, gambar 2-22 dan gambar 2-23.
Gambar 2-22.Membership inputperubahanerrordengan 7membership(Cen)
Gambar 2-23.Membershipoutput dengan 7membership (δu)
Tabel 2-7. Aturan-aturan kendalifuzzysecara umum untuk 7membership
N, NM, ZE, PM, P adalah kependekan darinegative,negative medium,
zero, positive medium,danpositive.
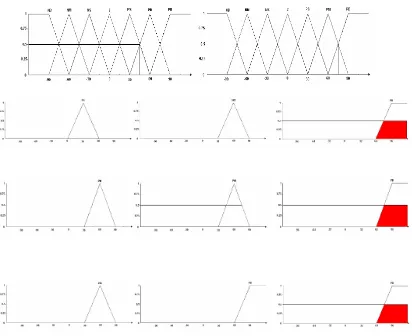
Katakanlah diperoleh nilai e = 45 dan Ce = 75 maka proses fusifikasi
dan defusifikasi yang terjadi dengan menggunakan aturan-aturan dari tabel
2-7 dapat dilihat pada gambar 2-24. Pada gambar 2-24 adalah proses
metode defusifikasiheight. Jika masukan e = 45 dan Ce = 75 maka
aturan-aturan yang digunakan adalah:
ife = PS andCe = PM thenU = PB
ife = PM andCe = PM thenU = PB
ife = PM andCe = PB thenU = PB
ife = PS andCe = PB thenU = PB
sedangkan aturan-aturan yang lain tidak tersulut karena nilai membership
outputyang dihasilkan diperoleh derajat keanggotaan = 0.
Dari gambar 2-24 diperoleh f1 = 0,5 sedangkan C1= 96. Contoh:
Gambar 2-24 (b). ProsesFuzzyfication, inferensi, dan komposisi
Gambar 2-25. ProsesDefuzzyfication
96 5
. 0
) 96 * 5 . 0 (
*
U
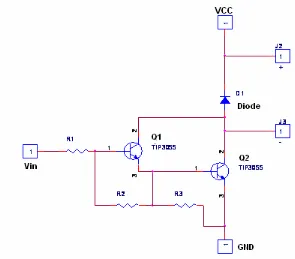
2.6. Mosfet Sebagai Saklar
Rangkaian transistor mosfet yang digunakan sebagai saklar dapat dilihat
pada gambar 2-26.
Digunakannya transistor mosfet agar dapat menangani arus dan tegangan
yang lebih besar jika dibandingkan dengan transistor BJT biasanya. Jika
digunakan sebagai switching, maka besarny IDL ditentukan oleh besarnya beban
dengan IDmaksimum:
RL VCC
IDL (2.7)
2.7. LCD (Liquid Crystal Display) [9]
Banyak sekali kegunaan LCD dalam suatu perancangan sistem ynag
menggunakan mikrokontroler. LCD merupakan suatu komponen yang dapat
menampilkan karakter pada display (tampilan) dengan bahan utama yang
digunakan adalah Liquid Crystal. Apabila diberi arus listrik sesuai dengan jalur
yang telah dirancang pada konstruksi LCD, cairan kristal akan terpolarisasi
(keruh) sehingga menghalangi cahaya dan membentuk suatu karakter tertentu.
LCD yang akan digunakan adalah jenis LCD M1632 dengan spesifikasi tampilan
2 x 16 (2 baris, 16 kolom). Konstruksi dari LCD dapat dilihat pada gambar 2-27.
LCD M1632 juga dilengkapi dengan mikrokontroler HD44780 yang
berfungsi sebagai pengendali LCD. Mikrokontroler ini terdiri dari CGROM
(Character General Read Only Memory), CGRAM (Character General Random
Access Memory) , dan DDRAM (Display Data Random Access Memory). Bentuk
fisik LCD dapat dilihat pada gambar 2-28.
Gambar 2-28. LCD M1632
CGROM merupakan memori untuk menggambarkan pola sebuah karakter di
mana pola tersebut sudah ditentukan secara permanen dari HD44780 sehingga
pengguna tidak dapat mengubahnya lagi. CGRAM merupakan memori untuk
menggambarkan pola sebuah karakter di mana bentuk dari karakter dapat
diubah-ubah sesuai keinginan. DDRAM merupakan memori tempat karakter yang
ditampilkan berada. Tampilan karakter pada LCD dengan kode ASCII-nya
sekaligus hubungan antara CGROM dengan DDRAM dapat dilihat pada gambar
Gambar 2-29. Hubungan antara DDRAM dan CGROM
Konfigurasi dari LCD M1632 dapat dilihat pada tabel 2-8 di bawah ini.
Tabel 2-8. Konfigurasi kaki LCD
No PIN Deskripsi
1 GND 0 v 2 VCC +5 v
3 VEE Tegangan Kontras LCD (tampilan)
4 RS Register Select, (0=Register Perintah, 1=Register Data) 5 R/W 1=Read, 0=Write
6 E Enable Clock LCD, logika 1 setiap kali pengiriman atau pembacaan data 7 D0 Data Bus 0
8 D1 Data Bus 1 9 D2 Data Bus 2 10 D3 Data Bus 3 11 D4 Data Bus 4 12 D5 Data Bus 5 13 D6 Data Bus 6 14 D7 Data Bus 7
2.8. Tanggapan Transien [10]
Tanggapan transien suatu sistem terhadap masukan tangga satuan
tergantung transien terhadap variasi system. .Tanggapan transien suatu sistem
kontrol secara praktek selalu menunjukkan osilasi teredam sebelum mencapai
keadaan tunaknya. Tanggapan transien pada umumnya dikelompokkan sebagai
berikut:
1. Time delay (td / waktu tunda) merupakan waktu yang diperlukan oleh
tanggapan untuk mencapai setengah nilai akhir untuk waktu yang
pertama.
2. Time rise (tr / waktu naik) merupakan waktu yang diperlukan oleh
tanggapan untuk naik dari 10% menjadi 90%, 5% menjadi 95%, atau 0%
menjadi 100% dari nilai akhir yang bisa digunakan. Untuk sistem atas
redaman waktu naik yang biasa digunakan 10% menjadi 90%.
3. Time peak (tp / waktu puncak) merupakan waktu yang diperlukan
tanggapan untuk mencapai puncak pertamaovershoot.
4. Waktu turun (ts) merupakan waktu yang diperlukan untuk menanggapi
kurva agar dapat mencapai dan tetap berada dalam rentang nilai akhir
ukuran yang disederhanakan dengan persentase harga akhirnya (biasanya
2% atau 5%). Waktu turun tadi dihubungkan dengan tetapan waktu
Gambar 2-30 Kurva tanggapan transient
5. Maximum overshoot (Mp) merupakan nilai puncak kurva tanggapan yang
mempunyai nilai lebih dari satu, maka biasa digunakan persen overshoot
maksimum, dan didefinisikan sebagai berikut:
Maksimum (persen)overshoot= 100%
) ( c
) ( c ) to (
c
Besarnya persen overshoot maksimum menunjukkan kestabilan
relatif dari sistem.
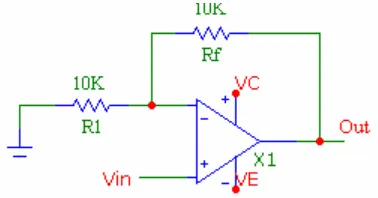
2.9. Penguat Non Inverting
Untuk mengubah suatu sinyal yang kecil tanpa mengubah fasanya,
diperlukan sebuah rangkaian penguat non-inverting. Rangkaiannya dapat dilihat
pada gambar 2.31
Nilai tegangan keluaran (Vout) dapat dihitung dengan rumus berikut ini
Vout = Vin
1
1
R Rf
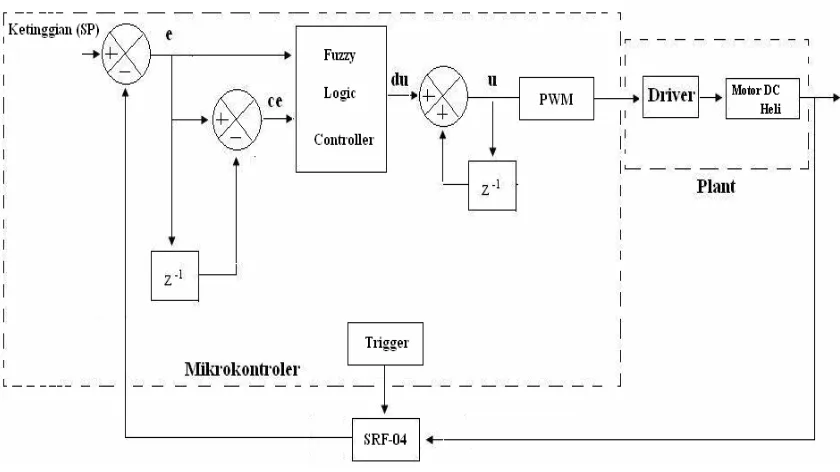
43 3.1. Diagram Blok
Gambar 3-1 menunjukkan diagram blok perancangan model pengontrol
ketinggian terbang helikopter dengan kontrol fuzzy dengan menggunakan
mikrokontroller AVR seri ATmega32.
Gambar 3-1. Diagram Blok Rancangan
Untuk mengontrol ketinggian terbang helikopter digunakan sensor
ultrasonic SRF-04 dengan keluaran berupa pulsa digital. Keluaran dari sensor
SRF-04 akan langsung masuk ke mikrokontroller karena sudah berupa data digital
yang tidak memerlukan ADC sebagai pengkonversi dari analog ke digital.
Mikrokontroller akan mengolah data dengan program kendali logika fuzzy.
Setelah data dari sensor diolah, keluaran dari mikrokontroller berupa PWM dalam
Rangkaian driver motor DC helikopter ini adalah rangkaian transistor untuk
menghidupkan motor DC helikopter.
Gambar 3-2. Rancangan Blok DiagramClosed-loopPengendali Kecepatan Motor DC
pada Helikopter
Gambar 3-2 adalah rancangan blok diagram sistem closed-loop.Set point
(ketinggian), perhitungan error (e), perubahan error (Ce), fuzzy logic control
(FLC), integrator, dan PWM akan diproses dalam mikrokontroller ATmega32.
Keluaran dari PWM akan langsung masuk keplantyang berupadriverdan motor
DC helicopter karena hanya berupa pulsa. Motor akan diaktifkan penuh sesuai
tegangan input.
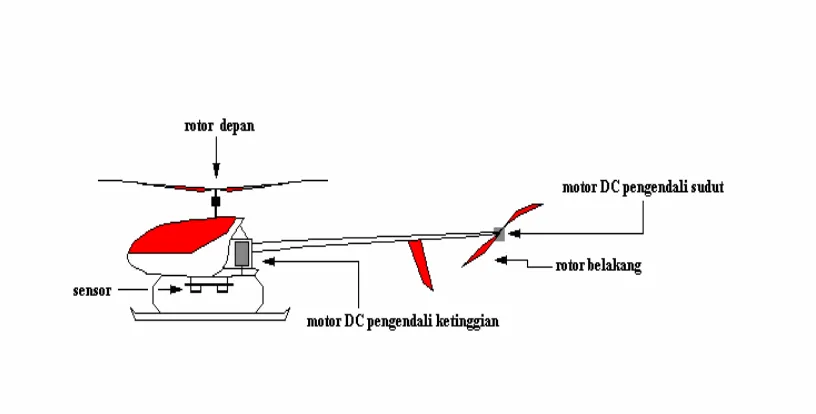
Gambar 3-3 adalah bentuk fisik pemodelan helikopter yang digunakan
sedangkan pada bagian ekor helikopter akan diatur agar helikopter dapat terbang
dalam keadaan stabil.
Gambar 3-3. Bentuk fisik helikopter yang digunakan
3.2. Perancangan Perangkat Keras
3.2.1. Driver Motor
Dari hasil perhitungan, nilai-nilai resistor pada rangkaian darlington yang
dapat dilihat pada gambar 2-13 adalah sebesar 1KΩ. Diode yang digunakan
adalah 1N4002. Sedangkan transistor yang digunakan adalah TIP3055 dengan
alasan dapat menghasilkan arus Ic sebesar 15A.
Dengan IB= 3,6mA, Vin = 5V, dan VBE= 1,4 V, maka,
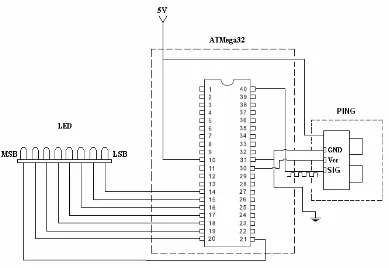
3.2.2. SensorUltrasonic
Sensor yang digunakan adalah sensor ultrasonic. Rangkaian percobaan
yang digunakan sebagai pengujian untuk mengaktifkan sensor dapat dilihat
pada gambar 3-4
Gambar 3-4. Rangkaian Sensor
Dari rangkaian di atas, untuk mengaktifkan sensor, diperlukan input
trigger. Trigger in akan dibangkitkan dari Atmega32 dari pin PortA0 yang
akan disambungkan ke pin 3 dari sensor yang merupakan Trigger IN dari
ping. Selanjutnya output sensor pada pin 3 akan dihubungkan ke pin
Diagram alir kerangka utama yang digunakan untuk menguji sensor dapat
dilihat pada gambar 3-5
Gambar 3-5. Diagram alir kerangka utama program SRF-04
Tabel 3.1. Data pengujian sensor
No. Tinggi (cm) Output ( biner )
1 3 0000 0011
2 4 0000 0100
3 6 0000 0110
4 8 0000 1000
5 10 0000 1010
6 12 0000 1100
7 14 0000 1110
8 16 0001 0000
9 18 0001 0010
10 20 0001 0100
11 22 0001 0110
12 24 0001 1000
13 26 0001 1010
14 28 0001 1100
15 30 0001 1110
16 32 0010 0000
17 34 0010 0010
18 36 0010 0100
19 38 0010 0110
20 40 0010 1000
21 50 0011 0010
22 60 0011 1100
23 70 0100 0110
24 80 0101 0000
25 100 0110 0100
26 110 0110 1110
3.2.3. PWM-Driver
Rangkaian yang digunakan dalam pengujian terhadap driver untuk
mengukur kecepatan motor yang akan digunakan untuk menentukan
membership output dapat dilihat pada gambar 3-6.
Gambar 3-6.Driver
Hasil dari pengujian rangkaian driverini dapat dilihat pada tabel 3.2.
Tabel 3.2. Data percobaan kecepatan motor
Percobaan
No T ON (ms) Rpm I Rpm II Rpm III I rata-rata
(A)
1 20 5780 5676 6044 0.988
2 19 5033 5136 5050 1.006
3 18 5020 5046 5001 1.005
4 17 4969 5016 4971 0.99
5 16 4960 4961 4957 0.998
6 15 4952 4954 4950 0.996
7 14 4941 4954 4931 0.982
8 12 4830 4945 4841 0.971
9 10 4806 4865 4684 0.947
10 8 4745 4751 4591 0.788
11 6 2912 4653 3249 0.325
12 4 1670 2732 1491 0.278
Dari hasil pengujian pada tabel 3.2 di atas, dapat diketahui bahwa semakin
besar duty cycle yang dihasilkan, maka kecepatan motor akan semakin cepat.
Besarnya arus pada motor saat berputar cepat adalah sebesar 1A.
3.2.4. Perancangan Mosfet sebagai Switching
Penguat daya yang menggunakan mosfet IRF740 akan ditunjukkan pada
gambar 3-7. Untuk dapat menarik arus sebesar 5A, maka VGS berada pada 10
V[7].Sedangkan Rgs ditentukan 10K sebagaibiasing.
Gambar 3-7. Penguat daya dengan IRF740
3.2.6. Antarmuka LCD dengan ATmega32
Antarmuka LCD dengan mikrokontroler ATmega32 ditunjukkan pada
gambar 3-8. Rangkaian ini berfungsi sebagai alat untuk pemberian set point
pada penilitian ini. LCD di sini berfungsi sebagai penampil set point yang
Gambar 3-8. Antarmuka LCD dengan ATmega32
3.2.5. Perancangan Rangkaian Non-Inverting
Rangkaian ini dirancang untuk menguatkan keluaran dari mikrokontroler
yang sebelumnya adalah 5 V menjadi 10V yang berarti dikuatkan sebesar 2
kalinya. k k Ri V Ri k V Ri Rf Vo 10 1 10 5 10 1 10 5 1
3.2.6. Rangkaian Lengkap
Rangkaian lengkap yang akan digunakan dalam melakukan penelitian ini
dapat dilihat pada gambar 3-10.
Gambar 3-10. Rangkaian lengkap perancangan perangkat keras.
Sensor ultrasonik SRF-04 akan digunakan sebagai input dalam proses
logika fuzzy.Output dari SRF-04 adalah berupa bilangan biner. Proses logika
fuzzydan fusifikasi akan diproses di dalam mikrokontroler.Output dari proses
fusifikasi adalah berupa PWM. Selanjutnya PWM akan dihubungkan pada
driver yang berfungsi sebagai penggerak motor. Sedangkan motor dc yang
berfungsi untuk pengendali ekor helikopter juga akan digerakkan oleh driver.
3.3. Perancangan Perangkat Lunak
3.3.1. Diagram Alir Program Utama
Diagram alir program utama dapat dilihat pada gambar 3-11. Program
terlebih dahulu akan melakukan inisialisasi awal. Setelah melakukan
ketinggian. Selanjutnya program akan membaca nilai sensor ultrasonik dan
diolah dengan program fuzzy logic control dan dilanjutkan pada penyesuaian
output data untuk mencegah terjadinya overflow yang dapat menyebabkan
kesalahan pada keluaran program
Gambar 3-11. Diagram Alir Program Utama
3.3.2. SubrutinFuzzy Logic Control
Subrutin fuzzy logic control adalah proses subrutin yang memproses data
ketinggian dengan menggunakan program pengendali logikafuzzy yang sudah
diprogram di dalam mikrokontroler ATmega32. Di dalam subrutin ini
terdapat proses fuzzyfication (fusifikasi), inferensi, komposisi, dan
defuzzyfication (defusifikasi). Proses fusifikasi, inferensi, dan komposisi
dilakukan dalam satu fungsi fusifikasi. Dalam fungsi ini dilakukan proses
penyulutan pada membership input dengan membership output dengan
menggunakan aturan-aturan yang telah dibuat. Selanjutnya dicari nilai
maksimum dari derajat keanggotaan dari setiap membership output .
Selanjutnya akan dilanjutkan dengan proses defusifikasi dengan memanggil
dengan metode height. Pada metode height ini untuk mempermudah
perhitungan maka nilai derajat keanggotaan setiap membership output akan
dikalikan dengan nilai tengah dari setiap membership output. Setelah selesai
maka program akan menyimpan hasilnya ke variabel output1. Program akan
diulang untuk memproses data kecepatan. Diagram alir subrutin fuzzy logic
controldapat dilihat pada gambar 3-12
Gambar 3-12. Diagram alir subrutinfuzzy logic control
3.3.4. PerancanganMembership
Pada perancangan pengendali dengan logika fuzzy ini, derajat
keanggotaan (membership) yang akan digunakan pada penelitian adalah
sebanyak 7 derajat keanggotaan (7membership). Gambar 13 dan gambar
ketinggian maksimal adalah 0.9m ( P = 0.9 dan N = -0.9 ). Gambar 3-15
adalah gambar diagramoutput(du).
Basis aturan yang akan dipakai logikafuzzy dapat dilihat pada tabel 2-7.
Metode defusifikasi yang akan dipakai adalah metode height yang dapat
dilihat pada gambar 2-20.
Gambar 3-12. Input error(e)
Gambar 3-13. Perubahanerror(Ce)
3.3.5. Subrutin Output Data
Subrutinoutput data mengontrol keluaran agar tidak terjadioverflow yang
akan menyebabkan kesalahan padaoutput. Program subrutin outputdata akan
lebih dahulu dimulai dengan proses integral dengan memanggil fungsi
integrator. Setelah proses integrator akan dicek apakah terjadi overflow atau
tidak. Jika tidak terjadi overflow maka data tidak diubah, namun jika terjadi
overflow maka data diubah agar tidak lebih dari nilai +255 dan kurang dari
nilai -255. Output akan dinormalisasi ke variabel nu sehingga dapat digunakan
untukouputke PWM. Nu2 di kirim register PWM(OCR2).
57
Suatu alat atau program untuk dapat dikatakan bekerja dengan baik
diperlukan sebuah pengujian terhadap alat atau program tersebut. Pada bab IV ini
akan dijelaskan tentang cara pengujian terhadap perangkat keras atau perangkat
lunak yang telah dirancang pada bab III sebelumnya.
Dari pengujian ini akan didapatkan data-data yang dapat memperlihatkan
bahwa perangkat keras dan perangkat lunak telah bekerja dengan cukup baik atau
tidak baik. Berdasarkan data-data yang didapat dari hasil pengujian akan
dilakukan analisa terhadap proses kerja yang nantinya dapat digunakan dalam
menarik kesimpulan. Dalam pengujian ini, tr yang akan digunakan adalah sebesar
10%-90%.
4.1 Hasil Implementasi Sistem Pengendali Ketinggian Terbang Helikopter
Plant yang digunakan dapat dilihat pada gambar 4-1 dengan rangkaian
elektronis yang terpisah dariplantdan tombol pemilihset pointyang dapat dilihat
pada gambar 4-2, namun sensor ultrasonik terpasang pada badan helikopter. Dari
hasil implementasi terdapat perbedaan bentuk plant yang digunakan dengan
dengan hasil perancangan pada bab III, yaitu pada bagian ekor helikopter yang
dipasang pada tiang penyangga. Pilihanset pointyang akan diuji adalah senilai 40
Gambar 4-1. Bentuk plant yang digunakan
.
Gambar 4-2 (a) Rangkaian Elektronis
Gambar 4-2 (b) Tombol PemilihSet Point
Saat alat dihidupkan, maka helikopter akan menuju ketinggian set point
yang sudah diatur default, yaitu 40 cm. Jadi, jika tidak diberi masukan set point
maka program akan menjalankan ketinggian default yang sudah diatur, yaitu 40
Sewaktu program dihidupkan, LCD akan menampilkan nama penulis selama
1 detik, kemudian pada LCD akan memberikan perintah untuk memilih set point
ketinggian yang sudah disediakan, yaitu 10cm, 20cm, 30cm, 40cm, 50cm, 60cm,
70cm, 80cm, dan 90cm. Dalam gambar 4-3 hasil tampilan pada LCD.
(a)
(b)
Gambar 4-3. Tampilan LCD saat program dinyalakan (a) tampilan LCD saat program
dinyalakan (b) tampilan LCD setelah 1 detik
Dalam memilihset pointyang diinginkan tersedia tombol-tombol pada salah
satu rangkaian elektronis yang akan mempermudah dalam pemilihan serta
LED-LED yang juga dapat membantu jika LCD tidak bekerja dengan baik. Rangkaian
elektronis tersebut dapat dilihat pada gambar 4-4.
LED berfungsi menunjukkan besarset point yang diinginkan.Jika set point
adalah 40 cm maka pada LED akan tertampil 0010 1000. Jika tombol naik ditekan
maka nilai set point(sp) akan bertambah 20 cm. Jika tombol turun ditekan maka
nilai sp akan berkurang 10 cm. Jika tombol send ditekan maka sp yang
diinginkan akan dikirim melalui mikrokontroler. Sedang tomboldisplay berfungsi
untuk menampilkan nilai sp yang diinginkan pada LCD. Contoh tampilan LCD
pada sp 40 cm dapat dilihat pada gambar 4-5.
Gambar 4-5. Tampilan LCD saat sp 40cm.
Sedangkan jika masukan sp melebihi nilai 90 cm, maka pada LCD akan
ditampilkan tulisan seperti pada gambar 4-6.
Gambar 4-6. Tampilan LCD saat sp melebihi 90 cm
4.2 Pengujian Terhadap RangkaianNon-Inverting
Pengujian rangkaian ini dilakukan dengan mengukur tegangan keluaran pada
Op-Amp dengan tegangan masukan yang berasal dari keluaran mikrokontroler
sebesar 4,92 V. Secara teoritis keluaran dari mikrokontroler adalah sebesar 5 V,
pada Op-Amp dirancang sebesar 2 kali tegangan masukan y