TUGAS AKHIR – RG 091536
APLIKASI MULTIBEAM ECHOSOUNDER, SIDE
SCAN SONAR, DAN SUB-BOTTOM PROFILER
UNTUK MENDETEKSI FREE SPAN PADA
SALURAN PIPA BAWAH LAUT
I M ADE DWIVA SATYA NUGRAHA NRP 3510 100 054
Dosen Pembimbing Ir. Yuwono, MT
JURUSAN TEKNIK GEOM ATIKA
Fakultas Teknik Sipil dan Perencanaan Institut Teknologi Sepuluh Nopember Surabaya 2014
FINAL ASSIGNMENT – RG 091536
MULTIBEAM ECHOSOUNDER, SIDE SCAN SONAR,
AND SUB-BOTTOM PROFILER APPLICATION FOR
SUBSEA PIPELINE FREE SPAN DETECTION
I M ADE DWIVA SATYA NUGRAHA NRP 3510 100 054
Supervisor Ir. Yuwono, MT
GEOM ATICS ENGINEERING DEPARTMENT Faculty of Civil Engineering and Planning Sepuluh Nopember Institute of Technology Surabaya 2014
v
APLIKASI MULTIBEAM ECHOSOUNDER, SIDE
SCAN SONAR, DAN SUB-BOTTOM PROFILER
UNTUK MENDETEKSI FREE SPAN PADA
SALURAN PIPA BAWAH LAUT
TUGAS AKHIR
Diajukan untuk Memenuhi Salah Satu Syarat Memperoleh Gelar Sarjana Teknik
pada
Jurusan S-1 Teknik Geomatika Fakultas Teknik Sipil dan Perencanaan
Institut Teknologi Sepuluh Nopember
Oleh:
I MADE DWIVA SATYA NUGRAHA
NRP. 3510 100 054
Disetujui oleh Pembimbing Tugas Akhir:
Ir. Yuwono, MT NIP. 1959 0124 1985 02 1001
v
APLIKASI MULTIBEAM ECHOSOUNDER, SIDE
SCAN SONAR, DAN SUB-BOTTOM PROFILER
UNTUK MENDETEKSI FREE SPAN PADA
SALURAN PIPA BAWAH LAUT
Nama Mahasiswa : I Made Dwiva Satya Nugraha
NRP : 3510 100 054
Jurusan : Te knik Geomatika FTSP-ITS
Dosen Pembimbing : Ir. Yuwono, MT Abstrak
Saluran pipa bawah laut sebagai salah satu sistem distribusi dalam industri minyak dan gas harus selalu diperhatikan kondisinya agar terhindar dari risiko kerugian material maupun dampak terhadap lingkungan. Salah satu yang harus diperhatikan yakni bentang bebas (free span) atau bagian pipa yang tidak tertumpu. Informasi panjang dan tinggi free span dapat diperoleh melalui survei inspek si dengan memanfaatk an instrumen hidroak ustik, seperti Multibeam Echosounder, Side Scan Sonar, dan Sub-Bottom Profiler.
Pada penelitian ini dilakukan pengolahan dan interpretasi ketiga data instrumen tersebut guna mendapatk an dimensi free span yang dibutuhkan. Ditemukan sebanyak 119 indik asi free span pada citra Side Scan Sonar dengan panjang dan tinggi yang bervariasi. Akan tetapi, terdapat selisih posisi horisontal pipa dengan yang terlihat pada data Multibeam Echosounder. Selisih posisi horisontal juga terjadi pada citra Sub-Bottom Profiler dengan data Multibeam Echosounder. Dimensi free span hasil interpretasi citra Side Scan Sonar juga memiliki perbedaan dengan yang diperoleh dari citra Sub-Bottom Profiler.
Analisis dilakukan terhadap perbedaan posisi, panjang, dan tinggi free span dari ketiga data dan diketahui bahwa posisi horisontal yang dapat diandalkan adalah posisi pipa dari Multibeam Echosounder. Hal ini disebabk an perambatan
vi
kesalahan yang sangat mungkin terjadi pada sistem towing yang diterapkan pada Side Scan Sonar dan data navigasi citra Sub-Bottom Profiler yang belum dikoreksi karena keterbatasan data.
Citra Sub-Bottom Profiler kurang baik bila dijadik an sebagai data utama dalam penentuan dimensi free span, k ecuali ak uisisi datanya dilak uk an dengan spasi yang rapat sehingga dapat diperoleh data top of pipe yang lebih banyak. Dalam hal ini, data yang digunakan adalah citra Side Scan Sonar dik arenak an mampu memberikan informasi kenampak an permuk aan dasar laut yang cukup jelas sehingga sangat baik digunak an untuk interpretasi panjang dan tinggi free span.
Ketiga instrumen hidroakustik ini dapat saling mendukung dengan kelebihan dan kek urangannya masing-masing dalam pendeteksian pipa dan free span-nya. Terutama untuk pendeteksian pipa tertanam yang tidak mampu dilakuk an oleh Side Scan Sonar dan Multibeam Echosounder, dapat mengandalkan Sub-Bottom Profiler yang memiliki k emampuan penetrasi menembus dasar laut sehingga memungk ink an pendeteksian indikasi pipa atau obyek lainnya yang tertanam.
Kata Kunci: Free Span, Multibeam Echosounder, Pipa Bawah Laut, Side Scan Sonar, Sub-Bottom Profiler
vii
MULTIBEAM ECHOSOUNDER, SIDE SCAN SONAR,
AND SUB-BOTTOM PROFILER APPLICATION FOR
SUBSEA PIPELINE FREE SPAN DETECTION
Name : I Made Dwiva Satya Nugraha
NRP : 3510 100 054
De partment : Te knik Geomatika FTSP-ITS
Supervis or : Ir. Yuwono, MT
Abstract
Subsea pipeline as one of distribution systems in oil and gas industry should always be inspected to avoid the risk of material loss and the impact on the environment. One of many aspects that should be a concern is free span or the distance between pipe that is not supported. The information of free span length and height can be obtained by using hydroacoustic instrument, such as Multibeam Echosounder, Side Scan Sonar, and Sub-Bottom Profiler.
This thesis had done the processing and interpreting of these three kind of data in order to obtain the free span dimensions. Found that there are 119 free span indications on Side Scan Sonar imageries with varying length and height. However, their horizontal positions are different with pipeline exposed by Multibeam Echosounder. The horizontal position differences also occur in Sub-Bottom Profiler imagery compared with Multibeam Echosounder data. The free spans dimensions obtained from Side Scan Sonar imageries also have differences with those obtained from Sub-Bottom Profiler imageries.
Some analysis were performed on these free span position and dimensions differences and it is known that the reliable horizontal position is the pipe position from Multibeam Echosounder data. This is due to the error propagation that might be occured in towing system applied on Side Scan Sonar and the
viii
navigation data of Sub-Bottom Profiler imageries that haven’t corrected yet due to data limitations.
Sub-Bottom Profiler imagery is not good enough to used as primary data in the determination of free span dimensions, unless the acquisition was done with short-spacing crossline to obtain more top of pipe data. In this case, Side Scan Sonar imagery is used because it is able to provide information better due to the appearance of seabed condition is quite clear, so that the interpretation of free span length and height can be done better. All of these instruments can support each other with their advantages and disadvantages in detection of pipeline and its free span. Especially for detecting the buried pipeline, that Side Scan Sonar and Multibeam Echosounder are not capable of, Sub-Bottom Profiler can do its best with the ability to penetrate into the bottom, thus allowing the detection of buried pipe indication or other buried objects.
Keywords: Free Span, Multibeam Echosounder, Subsea Pipeline, Side Scan Sonar, Sub-Bottom Profiler
xi
KATA PENGANTAR
Puji syukur penulis panjatkan kehadirat Tuhan Yang Maha Esa atas rahmat-Nya sehingga Tugas Akhir yang berjudul “Aplikasi Multibeam Echosounder, Side Scan Sonar, dan
Sub-Bottom Profiler untuk Mendeteksi Free Span pada Saluran Pipa
Bawah Laut” ini dapat diselesaikan dengan baik.
Selama pelaksanaan penelitian, banyak pihak yang telah memberikan bantuan dan dorongan baik secara moral maupun material yang diterima penulis. Untuk itu, penulis ingin mengucapkan terima kasih kepada:
1. Dr. Ir. Muhammad Taufik selaku Ketua Jurusan Teknik Geomatika ITS.
2. Ir. Yuwono, MT selaku dosen pembimbing.
3. PT. Mahakarya Geo Survey sebagai pihak penyedia data penelitian.
4. Mas Aga dan Mas Lukman selaku mentor selama di MGS. 5. Bu Illiah, Pak Henky, Pak Erikson, Pak Deni, Pak Pance, Pak
Didin, Mbak Handa, Mbak Vidia, dan Mas Rifki.
6. Orang tua dan keluarga besar atas doa dan dukungannya. 7. Senior dan teman-teman angkatan Geomatika 2010. 8. Teman-teman angkatan TPKH 2010 atas semangatnya.
Penulis menyadari bahwa masih terdapat kekurangan di dalam penyusunan Tugas Akhir ini. Karenanya, penulis mengharapkan saran dan kritik yang membangun sebagai pembelajaran bagi penulis untuk lebih baik kedepannya. Akhir kata, semoga Tugas Akhir ini dapat bermanfaat.
Surabaya, 7 Juli 2014
xiii
DAFTAR ISI
HALAMAN JUDUL ... i ABSTRAK... v LEMBAR PENGESAHAN ... ix KAT A PENGANT AR ... xi DAFT AR ISI...xiii DAFT AR GAMBAR...xviiDAFT AR TABEL... xxi
DAFT AR LAMPIRAN... xxiii
BAB I PENDAHULUAN ... 1 1.1 Latar Belakang ... 1 1.2 Perumusan Masalah ... 2 1.3 Batasan Masalah... 2 1.4 Tujuan ... 3 1.5 Manfaat... 3
BAB II TINJAUAN P USTAKA ... 5
2.1 Survei Hidrografi... 5
2.1.1 Definisi Survei Hidrografi... 5
2.1.2 Standard IHO untuk Survei Hidrografi (S-44)... 6
2.2 Survei Batimetri ... 8
2.2.1 Definisi Survei Batimetr i ... 8
2.2.2 Penentuan Kedalaman ... 8 2.3 Multibeam Echosounder ... 9 2.3.1 Prinsip... 9 2.3.2 Aplikasi ... 10 2.3.3 Sistem ... 11 2.3.4 Instalasi ... 12
2.3.5 Cakupan Dasar Laut ... 13
2.3.6 Kalibrasi ... 15
2.3.6.1 Latensi Posisi dan Kedalaman... 15
2.3.6.2 Kalibrasi Roll ... 16
2.3.6.3 Kalibrasi Pitch ... 17
2.3.6.4 Kalibrasi Yaw ... 18
2.3.6.5 Kalibrasi Cepat Rambat Gelombang Suara ... 19
2.4 Pasang Surut ... 20
xiv
2.4.2 Faktor Penyebab Pasang Surut ... 20
2.4.3 Tipe Pasang Surut... 21
2.4.4 Tujuan Pengamatan Pasang Surut ... 22
2.4.5 Kedudukan Permukaan Air Laut ... 22
2.5 Penentuan Posisi ... 23
2.5.1 Global Positioning System ... 23
2.5.2 Metode Penentuan Posisi dengan GPS... 24
2.6 Side Scan Sonar ... 25
2.6.1 Teori Operasi ... 26
2.6.1.1 Geometri ... 28
2.6.1.2 Rekaman ... 29
2.6.2 Instalasi... 31
2.6.2.1 Ditarik dari Buritan ... 31
2.6.2.2 Dipasang pada Kapal... 33
2.6.2.3 Metode Lainnya... 34
2.6.3 Stabilitas Sonar Fish ... 34
2.6.4 Interpretasi Citra Side Scan Sonar... 35
2.6.4.1 Reflektivitas dan Bayangan ... 35
2.6.4.1 Dimensi Kontak Side Scan Sonar... 37
2.7 Sub-Bottom Profiler... 38 2.7.1 Aplikasi... 38 2.7.2 Teori Operasi ... 39 2.7.2.1 Geometri ... 39 2.7.2.1 Sub-Bottom Profile ... 40 2.7.3 Instalasi... 41 2.7.3.1 Konstruksi Tetap ... 42
2.7.3.2 Ditarik dari Buritan ... 43
2.8 Pemosisian Bawah Air dengan USBL ... 43
2.9 Pipa Bawah Laut ... 44
2.9.1 Definisi Pipa Bawah Laut ... 44
2.9.2 Free Span ... 45
2.10 Penelitian Terdahulu ... 46
BAB III METODOLOGI ... 49
3.1 Lokasi Penelitian... 49
3.2 Peralatan dan Bahan ... 49
3.2.1 Peralatan ... 49
xv
3.3 Metodologi Penelitian ... 50
3.3.1 Tahap Pelaksanaan... 50
3.3.2 Tahap Pengolahan Data ... 52
3.3.2.1 Tahap Pengolahan Data Side Scan Sonar... 52
3.3.2.2 Tahap Pengolahan Data Multibeam Echosounder ... 53
3.3.2.3 Tahap Pengolahan Data Sub-Bottom Profiler ... 55
3.3.2.4 Tahap Komparasi Posisi Pipa SSS dan MBES ... 56
3.3.2.5 Tahap Komparasi Posisi Pipa MBES dan SBP ... 57
3.3.2.6 Tahap Komparasi Panjang dan Tinggi Free Span SSS dan SBP... 58
BAB I V HASIL D AN PEMBAHASAN ... 61
4.1 Data dan Hasil Penelitian... 61
4.1.1 Batimetr i ... 61
4.1.2 Citra Side Scan Sonar ... 62
4.1.3 Sub-Bottom Profile ... 63
4.1.4 Perbedaan Posisi Pipa dari Data SSS dan MBES ... 64
4.1.5 Perbedaan Posisi Pipa dari Data MBES dan SBP ... 66
4.1.6 Perbedaan Panjang Span dari Data SSS dan SBP ... 67
4.1.7 Perbedaan Tinggi Span dari Data SSS dan SBP ... 68
4.1.8 Free Span yang Terdeteksi ... 69
4.1.9 Pipeline Support yang Terdeteksi... 74
4.2 Pembahasan ... 75
4.2.1 Analisis Perbedaan Posisi Pipa dari Data SSS dan MBES ... 75
4.2.2 Analisis Perbedaan Posisi Pipa dari Data MBES dan SBP ... 78
BAB V KESIMPULAN D AN SARAN... 85
5.1 Kes impulan ... 85
5.2 Saran ... 85 DAFTAR PUSTAKA
LAMPIRAN
xvii
DAFTAR GAMBAR
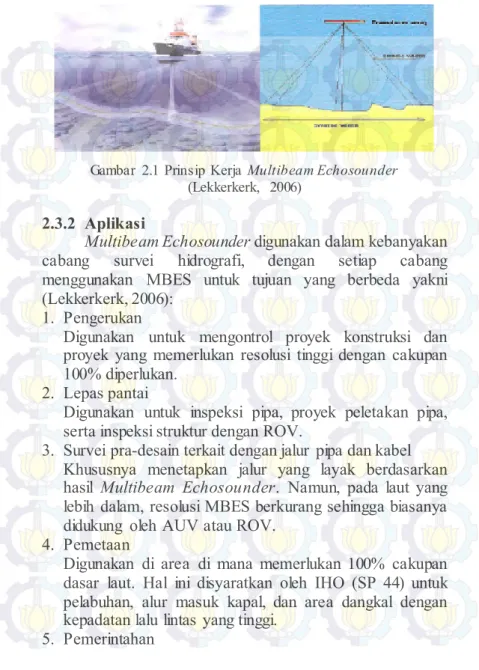
Gambar 2.1 Prinsip Kerja Multibeam Echosounder ... 10
Gambar 2.2 MBES Diputar pada Sudut 45° untuk Pekerjaan Inspeksi ... 11
Gambar 2.3 Instalasi di Samping dan Depan Kapal ... 13
Gambar 2.4 Footprint untuk Sektor Sudut Datang yang Berbeda (30°, 90°, 60°, 5°) ... 14
Gambar 2.5 Cakupan MBES: Penyesuaian Jalur (1), Perubahan Topografi Dasar Laut (2), Gerakan Roll dari Kapal (3) ... 15
Gambar 2.6 Latency Error versus Positioning Error pada Kecepatan Survei yang Berbeda ... 16
Gambar 2.7 Penentuan Roll Offset... 17
Gambar 2.8 Penentuan Pitch Offset ... 18
Gambar 2.9 Penentuan Yaw Offset ... 19
Gambar 2.10 Contoh Profil Kecepatan Suara dalam Air ... 20
Gambar 2.11 Segmen GPS ... 24
Gambar 2.12 Metode Penentuan Posisi Secara Diferensial... 25
Gambar 2.13 Diagram Penyerapan, Penghamburan, dan Pemantulan Gelombang Suara ... 27
Gambar 2.14 Penampang Melintang Sonar Fish ... 28
Gambar 2.15 Sketsa yang Menggambarkan Kondisi Bawah Permukaan Saat Perekaman... 29
Gambar 2.16 Rekaman Sonar Merepresentasikan Situasi Dasar ... 29
Gambar 2.17 Side Scan Sonar yang Ditarik dari Buritan... 31
Gambar 2.18 Posisi Sonar yang Tidak Benar Akibat Arus dari Samping... 32
Gambar 2.19 Posisi Sonar yang Tidak Benar Akibat Melengkungnya Tow Cable ... 32
Gambar 2.20 Side Scan Sonar yang Dipasang di Kapal ... 33
Gambar 2.21 Ilustrasi Ketidakstabilan Sonar Fish... 35
Gambar 2.22 Bayangan Terjadi pada Cekungan dan Gundukan 37 Gambar 2.23 Bayangan dari Obyek yang Menggantung ... 37
xviii
Gambar 2.24 Tinggi Obyek Dapat Dihitung dari Slant Range dan
Tinggi Sonar ... 38
Gambar 2.25 Tampilan Skematik Operasi SBP yang Dipasang di Kapal... 40
Gambar 2.26 Rekaman Chirp, Danau Vättern, Sweden ... 41
Gambar 2.27 Rekaman Pinger, Penampang Melintang Saluran Pipa ... 41
Gambar 2.28 Contoh Konstruksi Tetap pada Bagian Samping Kapal... 42
Gambar 2.29 Sistem Tarik untuk Instalasi SBP... 43
Gambar 2.30 Prinsip Ultra Short Baseline... 44
Gambar 2.31 Tipe Umum Free Span Pipa Bawah Laut ... 46
Gambar 3.1 Lokasi Penelitian (Bukan Lokas i Sebenarnya) .... 49
Gambar 3.2 Diagram Alir Tahap Pelaksanaan... 50
Gambar 3.3 Diagram Alir Pengolahan Data SSS ... 52
Gambar 3.4 Diagram Alir Pengolahan Data ASCII MBES .... 54
Gambar 3.5 Diagram Alir Pengolahan Data SBP ... 55
Gambar 3.6 Diagram Alir Komparasi Posisi Pipa SSS dan MBES ... 56
Gambar 3.7 Diagram Alir Komparasi Posisi Pipa MBES dan SBP ... 57
Gambar 3.8 Diagram Alir Komparasi Panjang dan Tinggi Free Span SSS dan SBP ... 58
Gambar 4.1 Profil Pasang Surut Air Laut ... 61
Gambar 4.2 Sebelum (Kiri) dan Sesudah (Kanan) Koreksi Slant Range ... 62
Gambar 4.3 Sebelum (Kiri) dan Sesudah (Kanan) Koreksi TVG ... 63
Gambar 4.4 Contoh Sonar Image yang Telah Dikoreksi ... 63
Gambar 4.5 Contoh Sub-Bottom Profile yang Telah Dikoreksi ... 64
Gambar 4.6 Free Span 9 ... 75
Gambar 4.7 Free Span 18... 75
Gambar 4.8 Free Span 21... 76
xix
Gambar 4.10 Free Span 34 ... 76
Gambar 4.11 Free Span 35 ... 76
Gambar 4.12 Free Span 100, 101 dan 102 ... 76
Gambar 4.13 Free Span 105 dan 106 ... 76
Gambar 4.14 Free Span 108 dan 109 ... 76
Gambar 4.15 Free Span 111 dan 112 ... 76
Gambar 4.16 Koordinat Top of Pipe yang Jumping pada Free Span 99, 100, 101, dan 102 (Atas) dan Free Span 103 dan 106 (Bawah) ... 78
Gambar 4.17 Free Span 103 dan 106 dengan Tinggi dari Data SBP (Atas) dan Posisinya pada Citra SSS (Bawah) ... 79
Gambar 4.18 Free Span 108 dan 110 dengan Tinggi dari Data SBP (Atas) dan Posisinya pada Citra SSS (Bawah) ... 80
Gambar 4.19 Top of Pipe dari Free Span 103 ... 81
Gambar 4.20 Top of Pipe dari Free Span 106 ... 81
Gambar 4.21 Top of Pipe dari Free Span 106 ... 81
Gambar 4.22 Top of Pipe dari Free Span 108 ... 82
Gambar 4.23 Top of Pipe dari Free Span 108 ... 82
xxi
DAFTAR TABEL
Tabel 4.1 Komparasi Posisi Free Span dari Data SSS dan MBES ... 65 Tabel 4.2 Komparasi Posisi Pipa dari Data MBES dan SBP ... 67 Tabel 4.3 Komparasi Panjang Free Span dari Data SSS dan SBP
... 67 Tabel 4.4 Komparasi Tinggi Free Span dari Data SSS dan SBP 68 Tabel 4.5 Free Span pada Saluran Pipa 26” di Lapangan X... 70 Tabel 4.6 Pipeline Support yang Terdeteksi ... 75
xxii
1
BAB I
PENDAHULUAN
1.1 Latar BelakangEnergi adalah kebutuhan global yang tidak dapat dipungkiri, terutama minyak dan gas (migas). Permintaan terhadap migas terus meningkat seiring dengan berkembangnya industri migas sehingga harus dibarengi dengan distribusi yang tepat, khususnya pada area lepas pantai. Pembangunan pipa bawah laut merupakan salah satu sistem distribusi pengangkutan material tersebut. Namun, saluran pipa ini memerlukan inspeksi secara berkala untuk menghindari risiko kerugian material terhadap industri itu sendiri dan juga dampaknya terhadap lingkungan, seperti misalnya bila terjadi kerusakan atau kebocoran.
Pipa bawah laut merupakan saluran pipa yang sangat panjang yang digunakan untuk pendistribusian material cair maupun gas antar anjungan atau dari anjungan ke darat. Banyak aspek yang harus diperhatikan dalam perancangan saluran pipa bawah laut, antara lain tebal dinding, pemilihan material, peninjauan rute, pemilihan rute, data lingkungan, perlindungan katodik terhadap korosi, kestabilan pada permukaan dasar laut, analisis tekuk, ekspansi termal, analisis kelelahan, dan analisis terhadap bentang bebas (free
span) atau bagian pipa yang tidak tertumpu.
Dinamika di lautan, seperti erosi, sand wave, dan rock
beam dapat menyebabkan terjadinya free span. Panjang free span ini sebaiknya dijaga dalam batas yang diizinkan pada
proses perancangan baik selama atau setelah instalasi dengan cara memberikan support atau penopang. Untuk mendeteksi
free span tersebut dilakukan inspeksi secara berkala. Inspeksi
pipa membutuhkan informasi yang teliti mengenai kondisi dasar laut. Survei inspeksi pada umumnya memanfaatkan berbagai macam instrumen hidroakustik, seperti Multibeam
Sub-bottom Profiler (SBP). Ketiga alat ini sama-sama
memanfaatkan gelombang akustik, namun memiliki prinsip kerja yang berbeda.
MBES dimanfaatkan untuk survei batimetri, yaitu survei yang dimaksudkan untuk mendapatkan data kedalaman dan topografi dasar laut, termasuk lokasi dan luasan obyek-obyek yang mungkin membahayakan (Pasek, 2011 dalam Subroto, 2012). SSS mampu membedakan besar kecil partikel penyusun permukaan dasar laut, seperti batuan, lumpur, pasir, kerikil, atau tipe-tipe dasar perairan lainnya (Bartholoma, 2006 dalam Gustiawan, 2012). SBP dapat menembus dasar laut untuk melihat struktur geologinya (Ramdhani, 2011), yang dalam Tugas Akhir ini dibatasi pada interpretasi indikasi pipa saja.
1.2 Perumusan Masalah
Perumusan masalah dari penelitian ini antara lain: 1. Bagaimanakah perbandingan data MBES, SSS, dan SBP
dalam mendeteksi indikasi free span.
2. Apakah metode terbaik untuk mendeteksi panjang dan tinggi indikasi free span.
1.3 Batasan Masalah
Batasan masalah dari penelitian ini antara lain:
1. Data MBES, SSS, dan SBP yang digunakan merupakan data yang diperoleh dari PT. Mahakarya Geo Survey (MGS).
2. Pengolahan data SSS untuk menghasilkan citra dasar laut yang baik untuk interpretasi pipa dan free span pipa. 3. Pengolahan data SBP untuk melihat indikasi pipa dan free
span pipa.
4. Pembuatan peta batimetri dari data MBES dan profil memanjang saluran pipa untuk penyajian data kedalaman dan morfologi dasar laut sepanjang pipa.
5. Analisis perbandingan data MBES, SSS, dan SBP untuk merekomendasikan metode terbaik dalam pendeteksian indikasi free span.
1.4 Tujuan
Tujuan dari tugas akhir ini adalah:
1. Menganalisis perbandingan data MBES, SSS, dan SBP untuk mendeteksi indikasi free span.
2. Merekomendasikan metode terbaik untuk mendeteksi panjang dan tinggi indikasi free span.
1.5 Manfaat
Manfaat dari tugas akhir ini adalah:
1. Memperoleh perbandingan data MBES, SSS, dan SBP dalam pendeteksian free span.
2. Dapat merekomendasikan metode terbaik untuk mendeteksi panjang dan tinggi indikasi free span.
5
BAB II
TINJAUAN PUSTAKA
2.1 Surve i Hidrografi2.1.1 De finisi Surve i Hidrografi
Istilah hidrografi pertama kali dikemukakan oleh
International Hydrographic Organization (IHO) pada Special Publication Number 32 (SP-32) tahun 1970 dan Group of Experts on Hydrographic Surveying and Nautical Charting dalam laporannya pada Second United Nation Regional Cartographic Conference for the Americas di
Mexico City tahun 1979. IHO mengemukakan bahwa hidrografi yakni (Poerbandono, 2005 dalam Yuwono, 2005):
“that branch of applied science which deal with measurement and description of physical feature of the navigable portion of earth’s surface and joining coastal areas, with special reference to their use for the purpose of navigation”.
Dari definisi di atas, dapat diterjemahkan bahwa hidrografi merupakan cabang ilmu terapan yang membahas tentang pengukuran dan deskripsi atau uraian unsur bagian permukaan bumi yang dikaitkan dengan daerah pantai dengan acuan tertentu untuk keperluan navigasi. Terdapat pula definisi tentang hidrografi yang dikemukakan oleh
Group of Experts on Hydrographic Surveying and Nautical Charting bahwa definisi hidrografi adalah:
“the science of measuring, describing, and depecting nature and configuration of the seabed, geographical relationship to landmass, and characteristics and dynamics of the sea”.
Secara ringkas bahwa hidrografi merupakan ilmu pengetahuan tentang pengukuran penjelasan, gambaran
alamiah dan konfigurasi dasar laut, keterkaitan massa bumi, dan karakteristik serta dinamika laut.
Dalam perkembangannya, IHO mendefinisikan kembali hidrografi sebagai berikut:
“that branch of applied science which deal with measurement and description of the feature of the seas and coastal areas for the primary purpose of navigation and all other marine purpose and activities, including inter alia offshore activities, research, protection of the environment, and prediction services”.
Definisi tersebut lebih luas jangkauannya yakni bukan sekedar pengukuran dan navigasi saja, akan tetapi sudah sampai ke aktivitas lepas pantai dan proteksi terhadap lingkungan. Salah satu kegiatannya adalah industri maritim yang mana tentunya memerlukan kegiatan-kegiatan survei di antaranya survei penentuan posisi, survei batimetri, pengamatan pasang surut, pengamatan arus, pengamatan gelombang, sedimen, temperatur, salinitas, survei seismik, survei magnetik, serta survei gravimetri.
2.1.2 Standard IHO untuk Survei Hidrografi (S-44)
Berdasarkan S-44 dari IHO edisi ke-5 yang dipublikasikan pada Februari 2008 berisi panduan yang lebih jelas mengenai fitur dasar laut dan sejumlah bahasan tentang kemampuan sistem untuk mendeteksi fitur dan karakteristik fitur yang terdeteksi. Disimpulkan bahwa S-44 menetapkan standard minimum survei yang dilakukan untuk keselamatan navigasi. Penentuan karakteristik yang tepat dari fitur yang terdeteksi maupun sistem dan prosedur tertentu untuk mendeteksi fitur tersebut menjadi tanggung jawab dan kewenangan dari setiap negara, relevan dengan organisasi pemerintah yang menanganinya. Bahasan publikasi S-44 yakni:
Survei hidrografi dibedakan menjadi empat orde yang berbeda, diantaranya:
Orde khusus
Digunakan pada daerah kritis yang berpotensi membahayakan kapal. Contohnya pelabuhan dan alur masuknya.
Orde 1a
Diperuntukkan bagi pelabuhan, alur navigasi, dan daerah pantai dengan lalu lintas komersial yang padat di mana kondisi dasar lautnya tidak begitu membahayakan kapal (misalnya lumpur atau pasir). Berlaku terbatas di perairan dengan kedalaman kurang dari 100 meter.
Orde 1b
Untuk perairan yang fitur dasar lautnya tidak membahayakan kapal. Orde ini digunakan pada perairan yang dalamnya kurang dari 100 meter yang tidak termasuk orde khusus dan 1a.
Orde 2
Digunakan pada daerah lepas pantai yang tidak disebut dalam orde khusus, 1a, atau 1b di mana kedalamannya lebih dari 100 meter.
2. Penentuan posisi
Posisi menggunakan kerangka referensi geosentrik berdasarkan International Terrestrial Reference Frame (ITRF), misalnya World Geodetic System (WGS84). Bila menggunakan datum horisontal lokal, datum lokal tersebut harus diikatkan pada kerangka referensi geosentrik berdasarkan pada ITRF.
3. Kedalaman
Kedalaman hasil pengukuran memerlukan reduksi terhadap variasi muka air sehingga diperlukan adanya pengamatan pula terhadap pasang surut air laut yang terjadi saat survei dilaksanakan. Kedalaman yang direduksi adalah terhadap chart datum.
4. Pengukuran lainnya
Terdapat pula pengamatan lainnya yang diperlukan, tetapi tidak dalam semua survei. Pengamatan tersebut antara lain: pengambilan sampel dasar laut, koneksi dengan datum di darat, prediksi pasang surut, dan pengamatan aliran dan arus.
2.2 Surve i Batimetri
2.2.1 De finisi Surve i Batimetri
Survei batimetri merupakan survei untuk melakukan pengukuran kedalaman yang ditujukan untuk memperoleh gambaran (model) bentuk permukaan (konfigurasi) dasar perairan (seabed surface). Bentuk permukaan yang dimaksud hanya sebatas pada konfigurasinya saja, tidak sampai pada kandungan materialnya ataupun biota yang tumbuh di atasnya, semata-mata bentuk (Poerbandono, 1999).
Menurut IHO, survei batimetri adalah “measured or
charted depth of water or the measurement of such depth”
(IHO, 1970). Pengukuran kedalaman dilakukan secara bersamaan dengan pengukuran posisi horisontalnya. Kedalaman diukur dengan instrumen gelombang akustik, sedangkan posisi horisontal didapatkan dari penentuan posisi menggunakan Global Positioning System (GPS) dengan metode diferensial atau DGPS. Pasang surut air laut juga berpengaruh terhadap survei dikarenakan variasi muka laut sehingga diperlukan pengamatan pasang surut untuk mereduksi hasil survei terhadap dinamika air laut tersebut.
2.2.2 Penentuan Kedalaman
Pemeruman atau sounding merupakan salah satu metode penentuan kedalaman dengan menggunakan prinsip pantulan gelombang akustik (Yuwono, 2005). Alat yang digunakan untuk kegiatan ini adalah perum gema atau
Echosounder. Pengukuran kedalaman menggunakan
langsung dengan mengukur waktu tempuh pulsa gelombang akustik yang dipancarkan oleh transduser ke dasar laut dan kembali ke transduser. Interval waktu tempuh pulsa gelombang akustik tersebut kemudian dikonversi menjadi kedalaman dengan prinsip sebagai berikut.
Di mana:
D : kedalaman laut yang diukur (m)
V : cepat rambat gelombang akus tik dalam air (m/s)
Δt : interval waktu antara gelombang yang dipancarkan dan diterima (s)
2.3 Multibeam Echosounder 2.3.1 Prinsip
Multibeam Echosounder (MBES) digunakan untuk
mengukur banyak kedalaman dari suatu susunan transduser. Kedalaman diukur sepanjang sapuan (swath) oleh transduser.
Multibeam Echosounder dicirikan oleh parameter berikut:
Frekuensi, pada rentang 12 – 500 kHz.
Lebar sapuan 90° – 180° (2 – 12 x kedalaman air). Akurasinya umumnya berkurang dengan bertambahnya lebar sapuan. Untuk pengukuran yang akurat, lebar sapuan normalnya dibatasi 4 x kedalaman air atau 120°. Lebar sorotan (beam), pada rentang 0,5° – 3°.
Range resolution, tergantung pada kedalaman, resolusi terbaik 1 – 15 cm.
Gambar 2.1 Prinsip Kerja Multibeam Echosounder (Lekkerkerk, 2006)
2.3.2 Aplikasi
Multibeam Echosounder digunakan dalam kebanyakan
cabang survei hidrografi, dengan setiap cabang menggunakan MBES untuk tujuan yang berbeda yakni (Lekkerkerk, 2006):
1. Pengerukan
Digunakan untuk mengontrol proyek konstruksi dan proyek yang memerlukan resolusi tinggi dengan cakupan 100% diperlukan.
2. Lepas pantai
Digunakan untuk inspeksi pipa, proyek peletakan pipa, serta inspeksi struktur dengan ROV.
3. Survei pra-desain terkait dengan jalur pipa dan kabel Khususnya menetapkan jalur yang layak berdasarkan hasil Multibeam Echosounder. Namun, pada laut yang lebih dalam, resolusi MBES berkurang sehingga biasanya didukung oleh AUV atau ROV.
4. Pemetaan
Digunakan di area di mana memerlukan 100% cakupan dasar laut. Hal ini disyaratkan oleh IHO (SP 44) untuk pelabuhan, alur masuk kapal, dan area dangkal dengan kepadatan lalu lintas yang tinggi.
Inspeksi dam, tanggul, dan pelabuhan. Bila digunakan untuk keperluan pekerjaan inspeksi, MBES sering digunakan dalam mode surface-looking, yang berarti sudut terluarnya dari satu sisi dari MBES diarahkan pada permukaan air, menciptakan sedikitnya cakupan 90° dari obyek yang diinspeksi.
Gambar 2.2 MBES Diputar pada Sudut 45° untuk Pekerjaan Inspeksi
(Lekkerkerk, 2006)
2.3.3 Siste m
Dengan kriteria lingkungan seperti yang disebutkan di atas, desain sitem MBES terdiri dari bagian-bagian berikut: 1. Prosesor data akustik
Prosesor harus memproses jumlah data yang sangat banyak, contohnya Seabat 8125 memiliki ping rate maksimum 40 sapuan/detik dan setiap sapuan terdiri dari 240 sorotan. Prosesor data Seabat ini didasarkan pada
chip Digital Signal Processing (DSP), yang kekuatannya
ekivalen kira-kira dengan 50 prosesor Pentium pada 500 MHz.
2. Tampilan kontrol
Untuk melakukan pengaturan dan menampilkan pembacaan serta status dari MBES itu sendiri.
Parameter transduser MBES antara lain frekuensi, jumlah sorotan, sudut sorotan, dan penilaian kedalaman maksimum. Menurut ukurannya, transduser MBES dapat dibagi menjadi flat array dan round array.
Keuntungan utama dari transduser round array adalah ada hubungan langsung antara posisi dari unsur-unsur yang diterima oleh transduser dan jumlah sorotan. Bila menggunakan flat array, pendeteksian fase digunakan untuk mendeteksi secara elektronik jumlah sorotan berdasarkan pada sinyal kembali. Proses ini juga disebut
focusing of the array. Karena panjang gelombang sinyal
bergantung pada frekuensi dan kecepatan suara, pemeriksaan kecepatan suara (sound velocity probe) digunakan untuk mengoreksi perbedaan kecepatan suara pada receive head.
Tergantung pada tipe MBES, array yang dipancarkan dan diterima dapat dipisah atau digabung.
4. Sistem pendukung
Guna mengoperasikan sistem MBES, jumlah minimum sistem survei lainnya yang dibutuhkan:
Sensor gerak untuk mengukur pengaruh heave, roll, dan pitch.
Gyro compass untuk mengukur sudut yaw. Positioning system.
Perangkat lunak akuisisi.
Sound velocity probe untuk mengukur kecepatan suara pada kedalaman yang berbeda (sound velocity profile).
2.3.4 Instalasi
MBES atau yang sering disebut Swath Sounder umumnya digunakan untuk membuat Digital Terrain Model (DTM) dengan akurasi yang sangat tinggi. Persyaratan instalasinya:
1. Sounder sebaiknya sejajar seakurat mungkin dengan sumbu horisontal dan vertikal kapal survei. Jika tidak
memungkinkan, kemiringan posisi sesedikit mungkin (< 5°) guna meminimalisir multiple reflection dari kapal survei.
2. Sounder sebaiknya ditempatkan sejauh mungkin dari peralatan yang menimbulkan noise. Misalnya
Echosounder yang beroperasi pada frekuensi yang sama,
mesin, dll. Apabila MBES dipasang di haluan kapal, pastikan MBES tersebut dipasang cukup dalam (minimum 0,5 – 1 m di bawah muka air di inshore dan > 1 m di offshore.
3. Sounder sebaiknya memiliki penglihatan bebas pada keseluruhan cakupan sorotan dan tidak terganggu oleh badan kapal.
4. Posisi Swath Sounder terkait dengan sistem survei lainnya sebaiknya ditentukan seakurat mungkin.
5. Walaupun pemasangan transduser umumnya ditentukan oleh jenis survei, pertimbangan harus memperhatikan penyusunan MBES tidak menggangu operasi kapal survei yang normal/aman.
Gambar 2.3 Instalasi di Samping dan Depan Kapal (Lekkerkerk, 2006)
2.3.5 Cakupan Dasar Laut
Pada peta batimetri umumnya, dari sebuah area yang luas mungkin membutuhkan hanya 1 kedalaman per 25 m2 di mana survei konstruksi membutuhkan 10 kedalaman per 1 m2. Untuk memenuhi cakupan ini, diperlukan penyesuaian kecepatan survei dan jarak jalur.
Cakupan yang didapat ketika menggunakan Swath
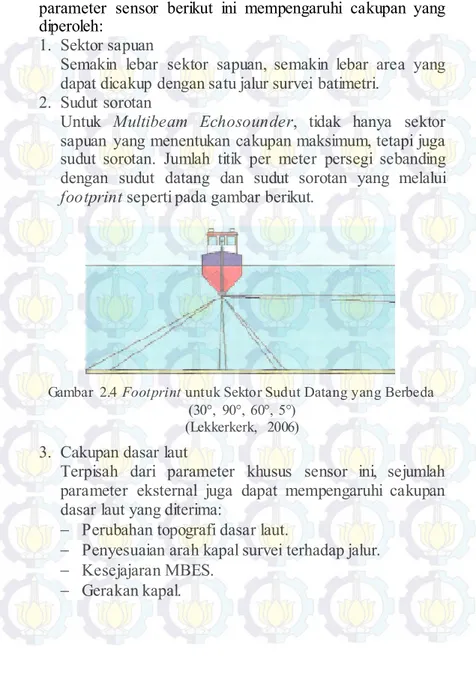
Parameter-parameter sensor berikut ini mempengaruhi cakupan yang diperoleh:
1. Sektor sapuan
Semakin lebar sektor sapuan, semakin lebar area yang dapat dicakup dengan satu jalur survei batimetri.
2. Sudut sorotan
Untuk Multibeam Echosounder, tidak hanya sektor sapuan yang menentukan cakupan maksimum, tetapi juga sudut sorotan. Jumlah titik per meter persegi sebanding dengan sudut datang dan sudut sorotan yang melalui
footprint seperti pada gambar berikut.
Gambar 2.4 Footprint untuk Sektor Sudut Datang yang Berbeda (30°, 90°, 60°, 5°)
(Lekkerkerk, 2006) 3. Cakupan dasar laut
Terpisah dari parameter khusus sensor ini, sejumlah parameter eksternal juga dapat mempengaruhi cakupan dasar laut yang diterima:
Perubahan topografi dasar laut.
Penyesuaian arah kapal survei terhadap jalur. Kesejajaran MBES.
Gambar 2.5 Cakupan MBES: Penyesuaian Jalur (1), Perubahan Topografi Dasar Laut (2), Gerakan Roll dari Kapal (3)
(Lekkerkerk, 2006)
2.3.6 Kalibrasi
Kualitas data MBES tergantung dari sensor-sensor yang terintegrasi dengannya. Oleh karena itu, diperlukan kalibrasi terhadap sistem ini untuk mendapatkan nilai koreksinya. Kalibrasi terhadap sensor di sini menggunakan metode patch test. Patch test adalah sebuah metode menggunakan patch atau bidang yang khusus dari dasar laut untuk menentukan kesejajaran Swath Sounder. Sebelum melakukan kalibrasi MBES, semua sistem tambahan sebaiknya dikalibrasi terlebih dahulu. Dan juga profil kecepatan suara sebaiknya diukur di area di mana patch test akan dilakukan. Parameter berikut ini dapat ditentukan dengan patch test:
Latensi atau delay antara positioning sytem dan Swath
Sounder.
Roll offset dari Sounder. Pitch offset dari Sounder. Yaw offset dari Sounder.
2.3.6.1 Latensi Posisi dan Kedalaman
Sebuah delay dapat dideteksi seakuratnya 10 – 50 msec. Nilai latensi yang umum antara 0,2 – 1 detik, menyebabkan kesalahan pemosisian yang mana tergantung
pada kecepatan survei, dapat berada di mana saja antara 0,3 – 5 m. Koreksi latensi diperlukan karena kebanyakan
positioning system membutuhkan waktu untuk menghitung
posisi dari pengukuran mentah (raw), berbeda dengan
Echosounder yang mengukur hampir seketika.
Gambar 2.6 Latency Error versus Positioning Error pada Kecepatan Survei yang Berbeda
(Lekkerkerk, 2006)
Untuk menentukan latensi, pilih lereng (slope) dengan sudut antara 1:2 dan 1:5. Berlayar pada jalur tegak lurus dengan lereng ini dengan kecepatan yang berbeda, satu dengan kecepatan survei dan lainnya dengan kecepatan maksimum atau kecepatan di mana kapal dapat melakukan manuver. Hal ini harus dilakukan dengan arah yang sama. Perbedaan profil dari lereng ini mengindikasikan adanya
delay antara positioning system dan MBES.
2.3.6.2 Kalibrasi Roll
Roll adalah parameter yang sangat penting ketika
menggunakan Swath Sounder karena kebanyakan Swath
Sounder akan menyapu tegak lurus searah dengan
pergerakan kapal survei. Kesalahan ini akan dapat diabaikan untuk sorotan pusat dan mencapai maksimumnya untuk sorotan terluar.
Guna menentukan roll offset, pilih area sedatar mungkin. Pada umumnya, semakin dalam dasar laut semakin
akurat penentuan kesalahan roll. Lakukan pada sebuah jalur dengan arah yang berlawanan di atas dasar laut yang datar ini dengan kecepatan yang sama. Untuk lebih jelasnya dapat dilihat pada gambar di bawah.
Gambar 2.7 Penentuan Roll Offset (Lekkerkerk, 2006) 2.3.6.3 Kalibrasi Pitch
Pitch adalah parameter lain yang sangat penting ketika
melakukan sounding di laut dalam atau ketika sounding pada lereng. Saat survei dasar laut yang datar, pitch offset akan menciptakan dasar laut yang lebih dalam atau lebih dangkal dari dasar laut yang sebenarnya tergantung pada arah offset. Masalah lainnya dengan pitch offset adalah ketika sounding pada lereng. Dikarenakan kesalahan pitch, lereng akan ditemukan pada posisi yang berbeda dari sebenarnya.
Untuk menentukan pitch offset, pilih area yang memiliki lereng antara 1:3 dan 1:5. Jika memungkinkan, pilih lereng yang dikelilingi oleh dasar laut yang datar. Pada umumnya, semakin curam lereng semakin akurat penentuan kesalahan pitch. Lakukan pada sebuah jalur dengan arah yang berlawanan di atas lereng dengan kecepatan yang sama.
Gambar 2.8 Penentuan Pitch Offset (Lekkerkerk, 2006) 2.3.6.4 Kalibrasi Yaw
Yaw juga termasuk dalam parameter penting yang
perlu diketahui ketika sounding pada lereng atau obyek sekitarnya. Ketika survei pada dasar laut yang datar, yaw
offset tidak akan menyebabkan perbedaan pada kedalaman
dasar laut. Begitu pula dengan saat melakukan survei pada area dengan lereng, tidak akan ada kesalahan kedalaman, yang ada hanya pergeseran posisi yang bervariasi sepanjang jarak tersebut.
Untuk menentukan yaw offset, pilih area yang memiliki lereng antara 1:3 dan 1:5 atau dengan obyek yang berbeda-beda di dasarnya. Jika memungkinkan, pilih lereng yang dikelilingi oleh dasar laut yang datar. Pada umumnya, semakin curam lereng semakin akurat penentuan kesalahan
yaw. Lakukan pada dua jalur dengan arah yang sama di
samping obyek. Jarak antar jalur harus menciptakan pertampalan (overlap) di tengah jalur tersebut dengan kecepatan yang sama.
Gambar 2.9 Penentuan Yaw Offset (Lekkerkerk, 2006)
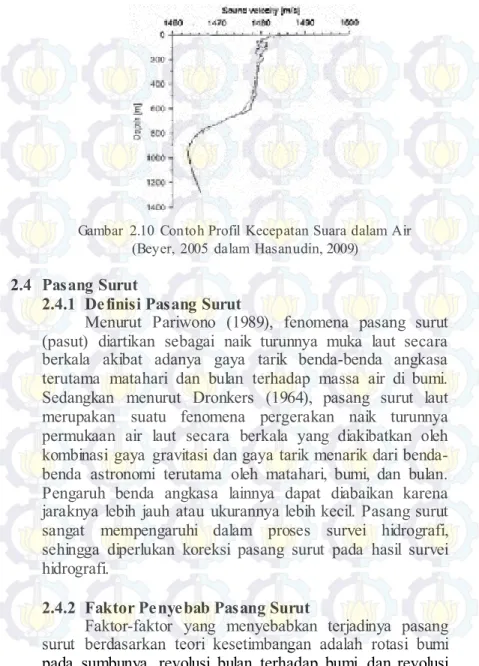
2.3.6.5 Kalibrasi Cepat Rambat Gelombang Suara
Kecepatan gelombang suara dalam air dipengaruhi oleh temperatur, salinitas, dan densitas air laut, sehingga menjadikan nilainya tidak selalu sama untuk setiap daerah survei. Profil kecepatan suara ini diambil menggunakan alat CTD (Conductivity Temperature and Depth) atau dengan SVP (Sound Velocity Profiler).
Data profil kecepatan suara ini didapatkan dengan cara kapal melewati jalur survei sebanyak minimal dua kali dengan relief dasar laut yang relatif datar. Kemudian pada masing-masing titik dilakukan pengambilan data salinitas, suhu, tekanan, dan kecepatan suara menggunakan SVP. Pengambilan data ini bertujuan untuk mengetahui waktu tempuh gelombang suara secara akurat (Hasanudin, 2009).
Gambar 2.10 Contoh Profil Kecepatan Suara dalam Air (Beyer, 2005 dalam Hasanudin, 2009)
2.4 Pasang Surut
2.4.1 De finisi Pasang Surut
Menurut Pariwono (1989), fenomena pasang surut (pasut) diartikan sebagai naik turunnya muka laut secara berkala akibat adanya gaya tarik benda-benda angkasa terutama matahari dan bulan terhadap massa air di bumi. Sedangkan menurut Dronkers (1964), pasang surut laut merupakan suatu fenomena pergerakan naik turunnya permukaan air laut secara berkala yang diakibatkan oleh kombinasi gaya gravitasi dan gaya tarik menarik dari benda-benda astronomi terutama oleh matahari, bumi, dan bulan. Pengaruh benda angkasa lainnya dapat diabaikan karena jaraknya lebih jauh atau ukurannya lebih kecil. Pasang surut sangat mempengaruhi dalam proses survei hidrografi, sehingga diperlukan koreksi pasang surut pada hasil survei hidrografi.
2.4.2 Faktor Pe nyebab Pasang Surut
Faktor-faktor yang menyebabkan terjadinya pasang surut berdasarkan teori kesetimbangan adalah rotasi bumi pada sumbunya, revolusi bulan terhadap bumi, dan revolusi
bumi terhadap matahari. Sedangkan berdasarkan teori dinamis adalah kedalaman dan luas perairan, pengaruh rotasi bumi (gaya coriolis), dan gesekan dasar. Selain itu juga terdapat beberapa faktor lokal yang dapat mempengaruhi pasang surut di suatu perairan, seperti topografi dasar laut, lebar selat, dan bentuk teluk, sehingga berbagai lokasi memiliki ciri pasang surut yang berlainan (Wyrtki, 1961).
Pasang surut laut merupakan hasil dari gaya tarik gravitasi dan efek sentrifugal. Efek sentrifugal adalah dorongan ke arah luar pusat rotasi. Meskipun ukuran bulan lebih kecil dari matahari, gaya tarik gravitasi bulan dua kali lebih besar daripada gaya tarik matahari dalam membangkitkan pasang surut laut karena jarak bulan lebih dekat daripada jarak matahari ke bumi. Gaya tarik gravitasi menarik air laut ke arah bulan dan matahari dan menghasilkan dua tonjolan pasang surut gravitasional di laut. Lintang dari tonjolan pasang surut ditentukan oleh deklinasi, yaitu sudut antara sumbu rotasi bumi dan bidang orbital bulan dan matahari (Priyana,1994).
2.4.3 Tipe Pasang Surut
Perairan laut memberikan respon yang berbeda terhadap gaya pembangkit pasang surut sehingga terjadi tipe pasut yang berlainan di sepanjang pesisir. Menurut Dronkers (1964), ada tiga tipe pasut yang dapat diketahui, yaitu: 1. Pasang surut diurnal
Yaitu bila dalam sehari terjadi satu kali pasang dan satu kali surut. Biasanya terjadi di laut sekitar katulistiwa. 2. Pasang surut semi diurnal
Yaitu bila dalam sehari terjadi dua kali pasang dan dua kali surut yang hampir sama tingginya.
3. Pasang surut campuran
Yaitu gabungan dari tipe 1 dan tipe 2, bila bulan melintasi khatulistiwa (deklinasi kecil), pasang surutnya bertipe
semi diurnal, dan jika deklinasi bulan mendekati maksimum, terbentuk pasut diurnal.
2.4.4 Tujuan Pengamatan Pasang Surut
Tujuan pengamatan pasang surut secara umum adalah sebagai berikut (Djaja, 1989 dalam Yuwono, 2005):
Menentukan permukaan air laut rata-rata (MLR) dan ketinggian titik ikat pasut (tidal datum plane) lainnya untuk keperluan survei rekayasa dengan melakukan satu sistem pengikatan terhadap bidang referensi tersebut. Memberikan data untuk peramalan pasut dan arus, serta
mempublikasikan data ini dalam tabel tahunan untuk arus dan pasut.
Menyelidiki perubahan kedudukan air laut dan pergerakan kerak bumi.
Menyediakan informasi yang menyangkut keadaan pasut untuk proyek teknik.
Memberikan data yang tepat untuk studi muara sungai tertentu.
Melengkapi informasi untuk penyelesaian masalah hukum yang berkaitan dengan batas-batas wilayah yang ditentukan berdasarkan pasut.
2.4.5 Ke dudukan Pe rmukaan Air Laut
Ada beberapa kedudukan permukaan air laut, yaitu (Djaja, 1989 dalam Yuwono, 2005):
Mean Tide Level, yaitu kedudukan rata-rata permukaan air laut untuk satu periode.
Mean High Water Spring (MHWS), yaitu kedudukan permukaan air pasang rata-rata selama satu tahun di mana deklinasi bulan rata-rata adalah 23,5°.
Mean Low Water Spring (MLWS), yaitu kedudukan permukaan air surut rata-rata selama satu tahun di mana deklinasi bulan rata-rata adalah 23,5°.
Mean Low Water Neaps.
Mean Higher High Water (MHHW), yaitu tinggi rata-rata dari dua air tinggi harian yang ada selama periode tertentu. Apabila pasutnya mempunyai karakteristik harian, harga MHHW biasanya dijelaskan sebagai MHWS. Apabila hanya satu tinggi air yang terjadi selama satu hari, maka besaran ini diambil sebagai Higher High
Water.
Mean Lower Low Water (MLLW), yaitu tinggi rata-rata dua air rendah harian selama periode tertentu. Untuk pasut harian, nilai MLLW biasanya digunakan dari nilai MLWS. Apabila hanya terdapat satu nilai rendah dalam satu hari, besaran ini diambil sebagai Lower Low Water. Mean Sea Level (MSL), yaitu ketinggian rata-rata
permukaan air laut dalam jangka waktu tertentu. Paling sedikit satu hari, misalnya satu bulan dan satu tahun. Harga yang terbaik diperoleh dari pengamatan yang dilakukan dalam waktu 18,6 tahun.
Lowest Water of Ordinary Spring Tide (LWOST), yaitu permukaan air laut yang terjadi akibat pengaruh gaya dan penyusutan. Jadi, tidak didefinisikan secara pasti.
Untuk acuan atau referensi dasar tinggi dari hasil pasut, dapat digunakan sesuai dengan kebutuhan yang diinginkan, misalnya MSL/MLR.
2.5 Penentuan Posisi
2.5.1 Global Pos itioning Syste m
Global Positioning System (GPS) adalah sistem radio
navigasi dan penentuan posisi menggunakan satelit. Nama formalnya adalah NAVSTAR GPS (Navigation Satellite
Timing and Ranging Global Positioning System). GPS
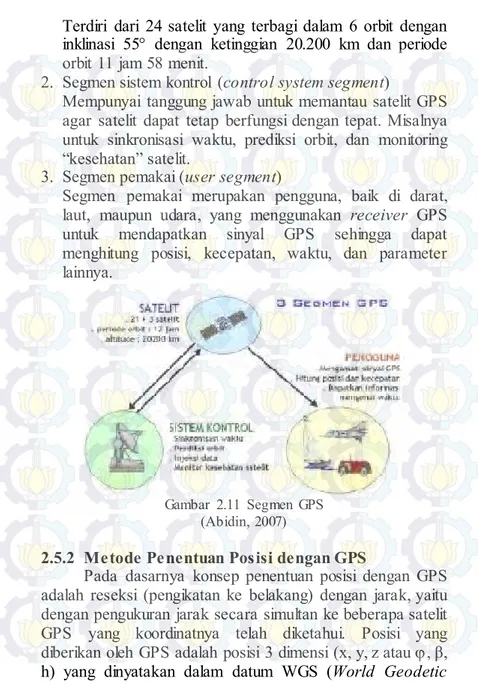
didesain untuk memberikan informasi posisi, kecepatan, dan waktu. Pada dasarnya GPS terdiri atas 3 segmen utama, yaitu:
Terdiri dari 24 satelit yang terbagi dalam 6 orbit dengan inklinasi 55° dengan ketinggian 20.200 km dan periode orbit 11 jam 58 menit.
2. Segmen sistem kontrol (control system segment)
Mempunyai tanggung jawab untuk memantau satelit GPS agar satelit dapat tetap berfungsi dengan tepat. Misalnya untuk sinkronisasi waktu, prediksi orbit, dan monitoring “kesehatan” satelit.
3. Segmen pemakai (user segment)
Segmen pemakai merupakan pengguna, baik di darat, laut, maupun udara, yang menggunakan receiver GPS untuk mendapatkan sinyal GPS sehingga dapat menghitung posisi, kecepatan, waktu, dan parameter lainnya.
Gambar 2.11 Segmen GPS (Abidin, 2007)
2.5.2 Metode Pe nentuan Pos isi dengan GPS
Pada dasarnya konsep penentuan posisi dengan GPS adalah reseksi (pengikatan ke belakang) dengan jarak, yaitu dengan pengukuran jarak secara simultan ke beberapa satelit GPS yang koordinatnya telah diketahui. Posisi yang diberikan oleh GPS adalah posisi 3 dimensi (x, y, z atau , β, h) yang dinyatakan dalam datum WGS (World Geodetic
System) 1984, sedangkan tinggi yang diperoleh adalah tinggi
ellipsoid. Secara garis besar penentuan posisi GPS dibagi menjadi dua metode, yaitu:
1. Metode absolut
Dikenal dengan point positioning, menentukan posisi hanya berdasarkan pada 1 pesawat penerima saja. Ketelitian posisi dalam beberapa meter dan umumnya hanya digunakan untuk navigasi saja.
2. Metode diferensial
Ketelitian posisi secara absolut yang hanya mengggunakan satu receiver GPS, dapat ditingkatkan dengan menggunakan penentuan posisi secara diferensial (relatif). Pada penentuan posisi diferensial, posisi suatu titik ditentukan relatif terhadap titik lainnya yang telah diketahui koordinatnya (titik referensi).
Gambar 2.12 Metode Penentuan Posisi Secara Diferens ial (Abidin, 2007)
2.6 Side Scan Sonar
Side Scan Sonar (SSS) digunakan untuk menghasilkan
citra dasar laut, yang mana diaplikasikan untuk investigasi geologi dan pencarian obyek seperti bangkai kapal, ranjau, dan pipa.
2.6.1 Teori Operasi
Side Scan Sonar adalah metode pencitraan bawah air
yang didasarkan pada prinsip akustik bawah air. Instrumen ini sangat sensitif dan dapat mengukur fitur yang lebih kecil dari 10 cm. Kegunaannya termasuk:
Pendeteksian obyek (ranjau, kapal karam, pipa, pesawat jatuh, kargo yang hilang).
Klasifikasi dasar laut (tipe sedimen, lapisan batuan, riak pasir).
Inspeksi konstruksi bawah air (konstruksi lepas pantai,
wellhead, pipa minyak, jembatan, tiang pancang, dinding
pelabuhan).
Instrumen Side Scan Sonar ditarik di belakang atau dipasang pada kapal dan sering disebut Tow Fish atau Sonar
Fish. Instrumen ini mengirim sinyal Sonar dengan pulsa
yang tegak lurus dengan arah Tow Fish. Sinyal suara tersebut memantul di dasar laut dan kembali ke Sonar Fish. Sonar
Fish memiliki receiver yang sensitif yang disebut juga
sebagai hydrophone yang menerima sinyal kembali.
Guna memperoleh hasil terbaik yang dimungkinkan, kebanyakan sistem adalah sistem dual frequency. Frekuensi tinggi seperti 500 kHz – 1 MHz memberikan resolusi bermutu tinggi, tetapi energi akustiknya hanya menjangkau jarak yang pendek. Frekuensi yang lebih rendah seperti 50 kHz – 100 kHz memberikan resolusi yang lebih rendah, tapi jarak yang dapat dijangkau lebih jauh.
Ketika pulsa suara mencapai dasar laut, sinyal suara bisa saja diserap, dipantulkan seperti pada cermin, atau dihamburkan ke berbagai arah yang berbeda. Suara yang dihamburkan kembali ke arah Sonar Fish disebut
Gambar 2.13 Diagram Penyerapan, Penghamburan, dan Pemantulan Gelombang Suara
(Lekkerkerk, 2006)
Seberapa banyak penghamburan, back scatter, dan penyerapan yang terjadi tergantung pada sifat material. Material keras, seperti batu, akan menghamburkan lebih banyak suara dibandingkan material halus, seperti lumpur, yang akan menyerap lebih banyak suara. Perbedaan jumlah hamburan menyebabkan perbedaan jumlah sinyal suara yang kembali ke Sonar Fish dan perbedaan citra dasar laut.
Data SSS yang merepresentasikan back scatter diterima oleh Sonar Fish dari insonified region di dasar laut.
Backscatter akustik adalah sebagai fungsi:
Sudut datang dari gelombang akustik di depan dasar laut. Kekasaran permukaan.
Kontras impedance yang melewati antarmuka solid-water (sedimen dasar laut yang lebih keras/lebih tegas atau obyek yang menghasilkan back scatter yang lebih tinggi dan muncul lebih gelap pada record final; karang dan kerikil adalah reflektor yang lebih baik daripada lumpur atau pasir).
Topografi (lereng bagian atas yang menghadap Sonar
Fish adalah reflektor yang jauh lebih baik dibandingkan
lereng bagian bawah dikarenakan perbedaan pada sudut datang).
Dengan citra SSS, back scatter yang tinggi direpresentasikan oleh warna yang lebih gelap, back scatter rendah oleh warna terang, back scatter nol direpresentasikan dengan warna putih. Pada umumnya, area dengan
back scatter tinggi diasosiasikan dengan sedimen yang relatif coarser-grained (berbutir kasar), hard substrata (substrat
keras), steep slopes (lereng curam), dan rough seabed (dasar laut yang kasar). Area dengan back scatter rendah sedimennya relatif finer-grained (berbutir lebih halus) yakni dasar laut yang datar dan halus. Warna putih juga dikenal sebagai shadow yang merupakan hasil dari acoustic
blank ing, ketika suatu obyek atau struktur menghalangi pulsa
suara dari SSS. 2.6.1.1 Geometri
Tipikal geometri dari operasi SSS adalah sebagai berikut:
1. Slant range: jarak dari Sonar Fish ke titik-titik di dasar laut. Slant range sama dengan jalan yang dilalui gelombang suara dari Sonar ke titik tersebut dan kembali lagi ke Sonar.
2. Horizontal range: jarak horizontal antara posisi, tepatnya bagian bawah Sonar Fish dan titik yang sama di dasar. Nilai horizontal range dapat dihitung dari tinggi Sonar dan slant range dengan menggunakan teorema pythagoras.
3. Maximum range: nilai maksimum dari slant range. Adalah pengaturan sistem, mengatur seberapa jauh pindaian Side Scan Sonar.
4. Insonified area: keseluruhan area yang tercakup oleh sorotan Sonar.
Gambar 2.14 Penampang Melintang Sonar Fish (Lekkerkerk, 2006)
2.6.1.2 Rekaman
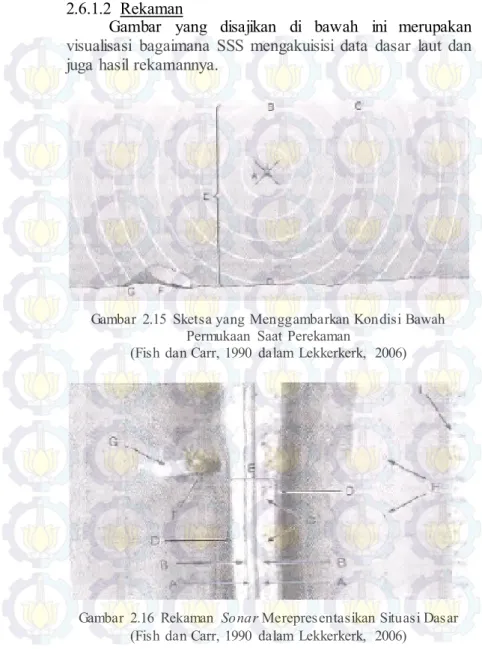
Gambar yang disajikan di bawah ini merupakan visualisasi bagaimana SSS mengakuisisi data dasar laut dan juga hasil rekamannya.
Gambar 2.15 Sketsa yang Menggambarkan Kondisi Bawah Permukaan Saat Perekaman
(Fish dan Carr, 1990 dalam Lekkerkerk, 2006)
Gambar 2.16 Rekaman Sonar Merepres entasikan Situasi Dasar (Fish dan Carr, 1990 dalam Lekkerkerk, 2006)
Data rekaman di atas menunjukkan:
A. Pemicu pulsa suara atau tanda pertama dari pulsa akustik pada sisi kiri dan kanan. Garis tipis menunjukkan jejak
Tow Fish.
B. Permukaan pertama yang ditangkap. Dalam kasus ini Tow
Fish berada lebih dekat ke permukaan daripada dasar laut.
Permukaan laut adalah reflektor yang baik dan mungkin terlihat pada beberapa rekaman di mana jarak antara
Sonar dan permukaan sama dengan tingginya di atas
dasar.
C. Diketahui sebagai clutter yang disebabkan oleh pantulan permukaan. Pada kasus ini clutter lebih terlihat pada bagian kanan. Hal ini dikarenakan gelombang permukaan adalah reflektor yang lebih baik pada bagian di bawah angin daripada bagian di atas angin.
D. Adalah bagian dasar pertama yang ditangkap. Pengecualian pada kondisi dasar yang sangat lembut. Dasar pertama yang ditangkap adalah indikasi yang baik dari tinggi Tow Fish. Rekaman memiliki bentang 75 m pada kedua sisi, yang mana menghasilkan ketinggian Tow
Fish yang rendah sekitar 7,5 m. Ketinggian tersebut
seharusnya lebih baik tetap berada pada 10 – 15% dari
maximum range.
E. Merupakan area putih antara pulsa yang dipancarkan dan dasar pertama yang ditangkap yang disebut dengan kolom air.
F. Adalah target Sonar di dasar, pada contoh ini bangkai kapal kecil.
G. Adalah bayangan akustik dari target. Karena target berada di dasar laut, benda tersebut menghalangi bagian dari energi akustik, menciptakan bayangan akustik di belakangnya.
H. Merupakan informasi tambahan berupa tanda skala. I. Merupakan informasi tambahan berupa pengaturan
2.6.2 Instalasi
Instalasi sistem Side Scan Sonar dapat dilakukan dengan berbagai cara tergantung ruang lingkup survei dan kondisi geografis dari area survei. Dalam pengoperasian dan pemrosesan data Side Scan Sonar, ada dua persoalan yang sangat penting, yakni citra Sonar harus sebaik mungkin dan posisinya harus benar. Oleh karena itu dibutuhkan susunan sistem yang terdiri dari:
Sistem Side Scan Sonar, termasuk komputer, plotter, Tow
Fish, dan tow cable.
Sistem pemosisian, di antaranya receiver GPS, komputer untuk pemrosesan dan menampilkan data navigasi. Penghubung data antara dua sistem ini diperlukan pula
guna merekam data navigasi yang telah diproses pada data Sonar.
2.6.2.1 Ditarik dari Buritan
Cara ini merupakan cara yang paling umum dalam pengoperasian sistem Side Scan Sonar. Sederhana, murah, dan handal. Dapat diterapkan pada hampir semua kapal tanpa banyak melakukan modifikasi terhadap kapal itu sendiri. Digunakan pada kedalaman dari yang hanya beberapa meter hingga ribuan meter.
Gambar 2.17 Side Scan Sonar yang Ditarik dari Buritan (Lekkerkerk, 2006)
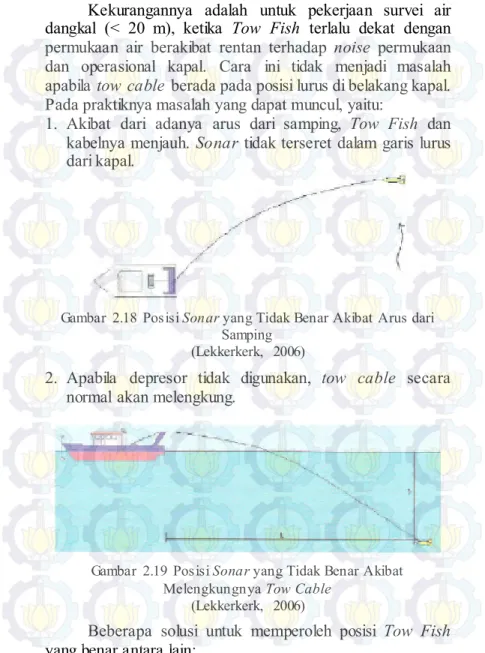
Kekurangannya adalah untuk pekerjaan survei air dangkal (< 20 m), ketika Tow Fish terlalu dekat dengan permukaan air berakibat rentan terhadap noise permukaan dan operasional kapal. Cara ini tidak menjadi masalah apabila tow cable berada pada posisi lurus di belakang kapal. Pada praktiknya masalah yang dapat muncul, yaitu:
1. Akibat dari adanya arus dari samping, Tow Fish dan kabelnya menjauh. Sonar tidak terseret dalam garis lurus dari kapal.
Gambar 2.18 Pos isi Sonar yang Tidak Benar Akibat Arus dari Samping
(Lekkerkerk, 2006)
2. Apabila depresor tidak digunakan, tow cable secara normal akan melengkung.
Gambar 2.19 Pos isi Sonar yang Tidak Benar Akibat Melengkungnya Tow Cable
(Lekkerkerk, 2006)
Beberapa solusi untuk memperoleh posisi Tow Fish yang benar antara lain:
Solusi matematis: dengan mengukur sudut antara arah kapal dan tow cable, koreksi dapat diperoleh.
Akustik bawah air: dengan menggunakan USBL yang terdiri dari transponder dan receiver. Alat ini berguna untuk mengukur jarak dan sudut relatif dengan orientasi kapal. USBL sensitif terhadap pantulan permukaan, maka dari itu lebih baik digunakan untuk kedalaman lebih dari 20 m di bawah permukaan.
2.6.2.2 Dipasang pada Kapal
Metode ini diterapkan untuk perairan yang sangat dangkal seperti jalur air pedalaman. Pastikan Sonar sejajar dengan kapal sehingga keduanya memiliki arah yang sama. Biasanya Sonar dipasang di bagian depan kapal, kira-kira 50 – 100 cm di bawah permukaan, tetapi untuk mencegah kerusakan Sonar Fish, sebaiknya tidak lebih dalam dari lambung kapal.
Gambar 2.20 Side Scan Sonar yang Dipasang di Kapal (Lekkerkerk, 2006)
Kekurangannya adalah tidak dapat digunakan untuk perubahan kedalaman dari beberapa meter menjadi puluhan meter.
2.6.2.3 Metode Lainnya 1. Dipasang di ROV
Untuk inspeksi konstruksi lepas pantai, SSS bersama dengan perekaman video diaplikasikan. Pada ROV, beberapa instrumen dapat ditambahkan, seperti perekam video, Side Scan Sonar, Vibrocore, dan Bottom Sampler. Dan perlu diperhatikan pentingnya posisi ROV dan parameter lainnya.
2. Dipasang di bawah pelampung
Survei di perairan dangkal dengan perahu kecil tidak memungkinkan untuk Side Scan Sonar dipasang pada perahu karena tidak cukup stabil. Pelampung digunakan untuk towing Side Scan Sonar dan dengan kecepatan perahu rendah.
2.6.3 Stabilitas Sonar Fish
Stabilitas Sonar di dalam air selama survei sangat penting untuk citra Sonar yang baik dan pemosisian yang akurat. Namun banyak faktor yang dapat menyebabkan
Sonar Fish tidak stabil. Terdapat beberapa jenis
ketidakstabilan Side Scan Sonar: 1. Heave dan Pitch
Walaupun merupakan gerakan yang berbeda, keduanya sering terjadi bersamaan. Menyebabkan berkurang dan bertambahnya ketinggian Sonar Fish. Hasilnya berdampak pada degradasi citra karena citra merepresentasikan target yang lurus dengan lengkungan. Ketika periode heave sangat panjang, degradasi citra menjadi terbatas.
Sedangkan pitch dibuktikan dengan garis terang pada rekaman Sonar. Karena pitch, sorotan Sonar tidak selalu mengarah ke sisi samping dasar tetapi juga ke depan dan ke belakang. Hal ini mengurangi back scatter dan intensitas echo yang kembali.
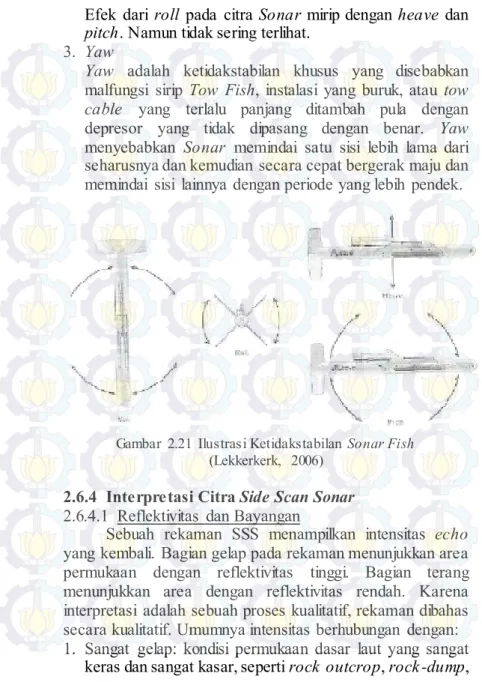
Efek dari roll pada citra Sonar mirip dengan heave dan pitch. Namun tidak sering terlihat.
3. Yaw
Yaw adalah ketidakstabilan khusus yang disebabkan
malfungsi sirip Tow Fish, instalasi yang buruk, atau tow
cable yang terlalu panjang ditambah pula dengan
depresor yang tidak dipasang dengan benar. Yaw menyebabkan Sonar memindai satu sisi lebih lama dari seharusnya dan kemudian secara cepat bergerak maju dan memindai sisi lainnya dengan periode yang lebih pendek.
Gambar 2.21 Ilustras i Ketidakstabilan Sonar Fish (Lekkerkerk, 2006)
2.6.4 Interpretasi Citra Side Scan Sonar
2.6.4.1 Reflektivitas dan Bayangan
Sebuah rekaman SSS menampilkan intensitas echo yang kembali. Bagian gelap pada rekaman menunjukkan area permukaan dengan reflektivitas tinggi. Bagian terang menunjukkan area dengan reflektivitas rendah. Karena interpretasi adalah sebuah proses kualitatif, rekaman dibahas secara kualitatif. Umumnya intensitas berhubungan dengan: 1. Sangat gelap: kondisi permukaan dasar laut yang sangat
konstruksi, pipa logam, barel minyak, kontainer kargo, dan bangkai kapal.
2. Gelap: kondisi permukaan yang keras dan kasar, seperti kerikil dan pasir yang sangat kasar, tanah gambut, tanah liat keras yang kasar, obyek buatan manusia yang kemungkinan besar logam, plastik, dan kayu.
3. Menengah: kondisi permukaan menengah, seperti pasir. Riak pasir kasar yang tidak terjadi pada permukaan sedimen yang lebih halus.
4. Terang: kondisi permukaan yang lembut dan halus, seperti tanah liat halus dan endapan lumpur.
5. Sangat terang: kondisi permukaan yang lembut dan sangat halus, bayangkan sebuah dasar seperti cermin dengan pantulan sempurna dan tanpa backscatter.
Ukuran dan bentuknya memberikan indikasi apakah benda tersebut alamiah atau buatan manusia. Ukuran dan bentuk dari sebuah kapal dapat dikenali dengan mudah. Untuk membedakan antara drum minyak yang rusak dan sebuah karang dengan ukuran yang sama akan lebih sulit dan lebih merupakan masalah interpretasi. Sebuah area yang luas dengan intensitas sama atau terdapat pola mengindikasikan bahwa dasar laut tersebut memiliki sedimen permukaan yang sama.
Variasi periodik pada reflektivitas mengindikasikan perubahan periodik dari dasar laut. contoh terbaik dari hal ini adalah riak pasir (sand ripples). Riak pasir bervariasi dalam bentuknya dari beberapa centimeter sampai ratusan meter dan disebabkan oleh arus. Adanya riak selalu berupa indikasi bahwa pasir adalah sedimen permukaan yang dominan. Jenis
soil lainnya tidak membentuk riak yang dapat dideteksi.
Obyek atau struktur dasar laut pada umumnya dapat menjadi reflektor yang kuat. Oleh karenanya, bayangan akustik sering diikuti oleh area dengan reflektivitas yang tinggi. Beberapa variasi posisi bayangan ditunjukkan pada gambar berikut.
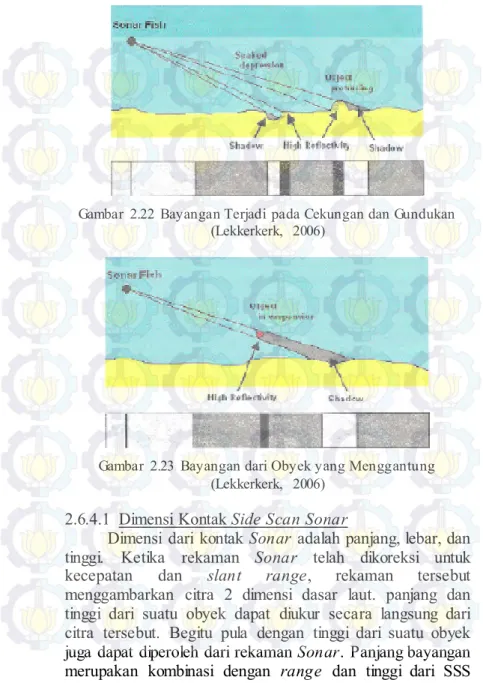
Gambar 2.22 Bayangan Terjadi pada Cekungan dan Gundukan (Lekkerkerk, 2006)
Gambar 2.23 Bayangan dari Obyek yang Menggantung (Lekkerkerk, 2006)
2.6.4.1 Dimensi Kontak Side Scan Sonar
Dimensi dari kontak Sonar adalah panjang, lebar, dan tinggi. Ketika rekaman Sonar telah dikoreksi untuk kecepatan dan slant range, rekaman tersebut menggambarkan citra 2 dimensi dasar laut. panjang dan tinggi dari suatu obyek dapat diukur secara langsung dari citra tersebut. Begitu pula dengan tinggi dari suatu obyek juga dapat diperoleh dari rekaman Sonar. Panjang bayangan merupakan kombinasi dengan range dan tinggi dari SSS
yang digunakan untuk menentukan tinggi obyek. Prinsip yang sama digunakan untuk menghitung tinggi free span dari pipa atau kabel. Panjang bayangan tersebut seharusnya diganti dengan jarak antara benda bereflektivitas tinggi tersebut dan bayangannya.
Gambar 2.24 Tinggi Obyek Dapat Dihitung dari Slant Range dan Tinggi Sonar
(Lekkerkerk, 2006)
2.7 Sub-Bottom Profiler 2.7.1 Aplikasi
Karakteristik pulsa suara dari Sub-Bottom Profiler (SBP) yakni tidak hanya memantul, tetapi juga mampu berpenetrasi menembus dasar dan memantul pada batas geologi di bawah dasar laut. SBP mencakup dua aplikasi utama dalam industri survei antara lain:
1. Pemetaan struktur geologi di bawah dasar laut
Proyek penelitian pasir untuk mengetahui ketebalan dan luas lapisan pasir di dasar laut.
Investigasi kondisi lapisan tanah untuk penempatan
platform minyak untuk mengetahui di manakah
lapisan paling atas yang dapat menahan berat