Aplikasi Multibeam dan Side Scan Sonar untuk Mendeteksi Target Runtuhnya Jembatan Kartanegara di Kutai Kalimantan Timur
Teks penuh
Gambar


Dokumen terkait
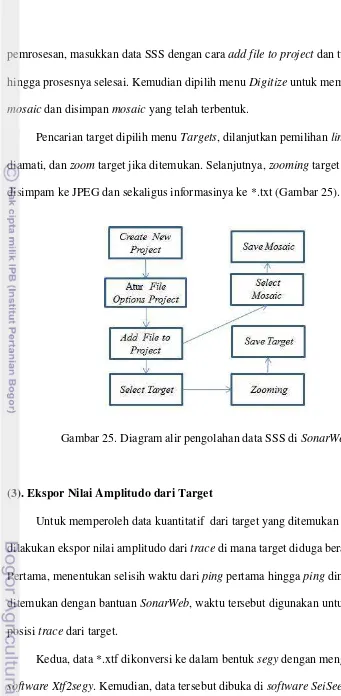
Penelitian ini menggunakan software Oasis Montaj, MagMap, SonarWiz, dan C- Max untuk mengolah data kemagnetan dan image yang dihasilkan side scan sonar sehingga
Penelitian yang telah dilakukan di daerah Lhokeseumawe menggunakan instrumen side scan sonar bertujuan untuk pengecekan posisi pipa dan objek yang terdeteksi di dasar
Setelah posisi target yang terdeteksi ditentukan, maka dilakukan penyapuan data dengan menggunakan instrumen CM (C-Max) Side Scan Sonar untuk mendapatkan hasil gambaran objek di
simulasi mekanisme keruntuhan struktur guna membuktikan penyebab keruntuhan truss jembatan akibat kegagalan geser pada baut klem alat sambung kabel penggantung vertikal ke kabel
Indikasi free span dari hasil pengolahan data multibeam echosounder dan side scan sonar tidak dapat mengidentifikasi hazard yang membahayakan pada lokasi
digunakan berdasarkan standar internasional DNV RP-F105, pemodelan 3D menggunakan data dari multibeam echosounder dan side scan sonar, analisis identifikasi ada
