DETEKSI DAN INTERPRETASI TARGET DI DASAR LAUT
MENGGUNAKAN INSTRUMEN SIDE SCAN SONAR
SOETJIE POERNAMA SARI
SKRIPSI
DEPARTEMEN ILMU DAN TEKNOLOGI KELAUTAN
FAKULTAS PERIKANAN DAN ILMU KELAUTAN
INSTITUT PERTANIAN BOGOR
2009PERNYATAAN MENGENAI SKRIPSI DAN SUMBER INFORMASI
Dengan ini saya menyatakan bahwa Skripsi yang berjudul:
DETEKSI DAN INTERPRETASI TARGET DI DASAR LAUT
MENGGUNAKAN INSTRUMEN SIDE SCAN SONAR
adalah benar merupakan hasil karya sendiri dan belum diajukan dalam bentuk apapun kepada perguruan tinggi manapun. Semua sumber data dan informasi yang berasal atau dikutip dari karya yang diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam daftar pustaka di bagian akhir Skripsi ini.
Bogor, November 2009
Soetjie Poernama Sari C54050630
ABSTRACT
Research on detection and interpretation of the target on the ocean floor using side scan sonar instrument was conducted in waters of East Aceh,
Lhokseumawe. The results showed that the value of the reflected signal from pipe and the unknown object are 1- 2.5 Voltage/Div, silty sand of 0.5 - 1 Voltage/Div, and mud is 0-0.5 Voltage/Div. Using FFT calculation the amplitude spectrum, the value of the pipe is higher than other objects, its about 1412 Volt/dB. The value of amplitude unknown object, mud and silty sand are 834.0728 Volt/dB, 106.2367 Volt/dB, and 238.9427 Volt/dB. The reflection coefficient of pipe respectively larger than the other detected targets.
RINGKASAN
SOETJIE POERNAMA SARI. Deteksi dan Interpretasi Target Di Dasar Laut Menggunakan Instrumen Side Scan Sonar. Dibimbing oleh HENRY M. MANIK.
Dasar laut adalah sebagian dari bumi yang wilayahnya belum terjelajahi secara keseluruhan, baik luas, kedalaman, maupun potensinya. Salah satu cara untuk mendapatkan informasi tentang berbagai aspek dari dasar laut adalah dengan sistem akustik bawah air seperti side scan sonar. Side scan sonar mampu membedakan besar kecil partikel penyusun permukaan dasar laut, seperti batuan, lumpur, pasir, kerikil, atau tipe-tipe dasar perairan lainnya. Instrumen ini mampu menangkap gelombang pasir atau riak-riak kecil yang tingginya beberapa
sentimeter serta mampu memberikan informasi dengan rinci tentang kondisi topografi dasar. Tujuan dari penelitian ini adalah mendeteksi dan
menginterpretasikan target di dasar laut menggunakan instrumen side scan sonar. Pengambilan data akustik dilakukan pada tanggal 19-20 November 2008 menggunakan instrumen C-Max Side Scan Sonar dengan frekuensi 325 kHz. Pengolahan dan analisis data dilakukan pada bulan Februari 2009 dan berakhir hingga bulan Oktober 2009 menggunakan Software MaxView dan Matlab 7.0.1. Pengolahannya berdasarkan nilai pantulan sinyal, koefisien refleksi, perhitungan dimensi dari masing-masing target yang terdeteksi, dan jenis substrat yang mendominasi di daerah yang diteliti.
Berdasarkan hasil yang diperoleh, ada empat target yang terdeteksi yaitu pipa, substrat lumpur dan lumpur berpasir, serta objek yang tidak diketahui. Dari hasil perhitungan, didapat bahwa nilai pipa dan objek yang tidak diketahui memiliki nilai pantulan sinyal yang paling tinggi (1-2.5 Voltage/Div)
dibandingkan dengan target lainnya. Dari hasil pengambilan contoh substrat di lokasi penelitian ditemukan bahwa jenis substrat yang mendominasi di lokasi penelitian adalah lumpur dan lumpur berpasir. Pada analisis Fast Fourier
Transform (FFT), nilai pipa lebih tinggi dibandingkan dengan target lainnya, yaitu
sebesar 1412 Volt/dB. Nilai amplitude spectrum pada unknown objek, lumpur dan lumpur berpasir adalah 834.0728 Volt/dB, 106,2367 Volt/dB, dan 238.9427 Volt/dB. Nilai koefisien refleksi yang terhitung, menyatakan bahwa nilai koefisien refleksi pipa yang dihasilkan adalah 0.8649 lebih besar dibandingkan dengan target yang terdeteksi lainnya. Hasil perhitungan backscattering strength (SS) dari lumpur adalah sebesar 6.5913 dB dan untuk lumpur berpasir sebesar -4.0129 dB.
© Hak cipta milik Soetjie Poernama Sari, tahun 2009
Hak cipta dilindungi
Dilarang mengurangi dan memperbanyak tanpa izin tertulis dari Institut Pertanian Bogor, sebagian atau seluruhnya dalam bentuk apapun, baik cetak, fotocopy, microfilm, dan sebagainya.
DETEKSI DAN INTERPRETASI TARGET DI DASAR LAUT
MENGGUNAKAN INSTRUMEN SIDE SCAN SONAR
Oleh:
SOETJIE POERNAMA SARI
Sebagai salah satu syarat untuk memperoleh gelar Sarjana Ilmu Kelautan pada Departemen Ilmu dan Teknologi Kelautan Fakultas Perikanan dan
Ilmu kelautan
SKRIPSI
DEPARTEMEN ILMU DAN TEKNOLOGI KELAUTAN
FAKULTAS PERIKANAN DAN ILMU KELAUTAN
INSTITUT PERTANIAN BOGOR
2009LEMBARAN PENGESAHAN
Judul : DETEKSI DAN INTERPRETASI TARGET DI
DASAR LAUT MENGGUNAKAN INSTRUMEN SIDE SCAN SONAR
Nama : Soetjie Poernama Sari
NRP : C54050630
Departemen : Ilmu dan Teknologi Kelautan
Menyetujui Dosen Pembimbing, Dr. Ir Henry M. Manik, M.T NIP. 19701229 199703 1 008 Mengetahui Ketua Departemen,
Prof. Dr. Ir. Setyo Budi Susilo, M.Sc NIP. 19580909 198303 1 003
KATA PENGANTAR
Puji syukur kepada Allah SWT, atas berkat dan rahmat-Nya penulis dapat menyelesaikan skripsi yang merupakan salah satu syarat untuk memperoleh gelar sarjana di Departemen Ilmu dan Teknologi Kelautan, Fakultas Perikanan dan Ilmu Kelautan, Institut Pertanian Bogor.
Penulisan skripsi ini tidak akan terselesaikan tanpa bantuan, dukungan, dan doa dari berbagai pihak. Terima kasih dengan tulus penulis ucapkan, terutama kepada:
1. Keluarga tercinta, papa, mama, dan adik atas segala dukungan, doa dan kasih sayangnya.
2. Bapak Dr. Ir. Henry M. Manik, M.T selaku pembimbing yang telah sudi meluangkan waktu, tenaga, pikiran, dan bimbingannya selama penyusunan skripsi.
3. Dr. Ir. Sri Pujiyati, M.Si selaku penguji dari perwakilan komisi pendidikan pada ujian akhir penulis yang telah memberikan saran dan masukan.
4. Dr. Ir. Totok Hestirianoto, M.Sc selaku penguji tamu yang telah memberikan saran dan masukan dalam penyelesaian skripsi.
5. Letda (Arh) Hendro Ramadani, yang telah memberikan dukungan, doa, kasih sayang, saran, kritik, dan motivasi selama penyusunan skripsi
6. Kolonel Laut (E) Sugianto beserta staf, yang telah memberikan bimbingan dan bantuan baik secara moril dan materiil selama penyusunan skripsi.
7. Letkol Laut (E) Yudhi, Letkol Laut (E) Wisnu, Letkol Laut (E) Nurriyadi, dan Mayor Laut (E) Tunggul Puliwarna, yang telah banyak membantu dalam penyusunan skripsi.
8. Mayor Laut (E) Nuryadi, Mayor laut (E) Pittor Tampubolon beserta anggota survei HIDROS yang telah memberikan kesempatan untuk mengikuti survei lapangan.
9. Rekan-rekan Dikspespa HIDROS angkatan VII 2009 yang telah membantu selama survei.
10. Rekan-rekan ITK 42 yang telah banyak membantu dan memberikan saran dalam penyusunan skripsi.
11. Teman-teman ISCER dan Ar-Riyadh, terima kasih buat kebersamaannya. 12. Semua pihak yang tidak dapat disebutkan satu persatu, yang telah membantu
dan memberikan bimbingan dalam pengolahan data dan penyusunan skripsi. Penulis menyadari bahwa skripsi ini masih jauh dari sempurna. Penulis berharap, skripsi ini dapat memberikan kontribusi informasi dan wawasan yang berguna bagi penulis dan pihak yang membacanya.
Bogor, November 2009
DAFTAR ISI
Halaman
DAFTAR TABEL ... xi
DAFTAR GAMBAR... xii
DAFTAR LAMPIRAN ... xv 1. PENDAHULUAN ... 1 1.1 Latar Belakang ... 1 1.2 Tujuan ... 2 2. TINJAUAN PUSTAKA ... 3 2.1 Sonar ... 3
2.2 Side Scan Sonar ... 4
2.3 Instalasi Side Scan Sonar ... 6
2.4 Prinsip Kerja Side Scan Sonar... 8
2.5 Interpretasi Citra Side Scan Sonar... 9
2.6 Sedimen Dasar laut ... 10
2.7 Kecepatan Suara ... 12
3. METODOLOGI... 15
3.1 Waktu dan Lokasi Penelitian ... 15
3.2 Alat dan Bahan ... 15
3.3 Sistem Kerja Side Scan Sonar ... 16
3.4 Pengambilan Data ... 19
3.5 Pemrosesan Data ... 21
3.6 Analisis Data... 23
4. Hasil dan Pembahasan ... 31
4.1 Hasil Pengambilan Contoh Dasar... 31
4.2 Pantulan Sinyal Target... 32
4.3 Analisis FFT (Fast Fourier Transform) ... 43
4.4 Akustik Impedansi dan Backscattering strength (SS) ... 49
4.5 Dimensi Target Terdeteksi... 51
5. Kesimpulan dan Saran ... 54
5.1 Kesimpulan... 54
5.2 Saran ... 54
DAFTAR PUSTAKA... 55
LAMPIRAN ... 57
DAFTAR TABEL
Halaman
1. Ukuran Partikel Sedimen... 12 2. Hasil pengukuran rata-rata dan perhitungan elastic konstan pada
berbagai jenis sedimen ... 14 3. Hasil Perhitungan Akustik Impedansi dan Koefisien Refleksi ... 50 4. Hasil Perhitungan Dimensi Target Terdeteksi... 53
DAFTAR GAMBAR
Halaman
1. Diagram Side Scan Sonar dan citra Side Scan Sonar ... 6
2. Blok Diagram Prinsip Kerja Side Scan Sonar... 8
3. Peta Lokasi Penelitian... 15
4. Sistem Kerja Side Scan Sonar... 18
5. Skema Pengambilan Data Side Scan Sonar Tampak Samping... 19
6. Diagram alir pengambilan Data Side Scan Sonar ... 20
7. Diagram alir pemrosesan data akustik... 21
8. Diagram Segitiga Shephard ... 22
9. Contoh Kualitas Data Side Scan Sonar ... 24
10. Contoh Citra Side Scan Sonar Berdasarkan Rona Terang, Rona Sedang, dan Rona Gelap... 25
11. Skema perhitungan slant range correction... 26
12. Skema perhitungan layback correction ... 27
13. Skema perhitungan layback correction ... 27
14. Skema perhitungan tinggi objek... 28
15. Pantulan Sinyal... 29
16. Lokasi Bottom Sampling dan Pipa ... 31
17. Hubungan Nilai Pantulan Sinyal Terhadap Waktu Pada Alur 1 ... 33
18. Hubungan Nilai Pantulan Sinyal Terhadap Waktu Pada Alur 2 ... 33
19. Hubungan Nilai Pantulan Sinyal Terhadap Waktu Pada Alur 3 ... 34
20. Hubungan Nilai Pantulan Sinyal Terhadap Waktu Pada Alur 4 ... 34
21. Hubungan Nilai Pantulan Sinyal Terhadap Waktu Pada Alur 5 ... 35
22. Hubungan Nilai Pantulan Sinyal Terhadap Waktu Pada Kolam 1... 35
23. Hubungan Nilai Pantulan Sinyal Terhadap Waktu Pada Kolam 2... 36
24. Hubungan Nilai Pantulan Sinyal Terhadap Waktu Pada Kolam 3... 36
25. Hubungan Nilai Pantulan Sinyal Terhadap Waktu Pada Kolam 4... 37
26. Hubungan Nilai Pantulan Sinyal Terhadap Waktu Pada Kolam 5... 37
27. Hubungan Nilai Pantulan Sinyal Terhadap Waktu Pada Kolam 6... 38
28. Hubungan Nilai Pantulan Sinyal Terhadap Waktu Pada Kolam 7... 38
29. Hubungan Nilai Pantulan Sinyal Terhadap Waktu Pada Kolam 8... 39
30. Hubungan Nilai Pantulan Sinyal Terhadap Waktu Pada Lajur 174... 39
31. Hubungan Nilai Pantulan Sinyal Terhadap Waktu Pada Lajur 176... 40
32. Hubungan Nilai Pantulan Sinyal Terhadap Waktu Pada Lajur 177... 40
33. Nilai Rata-rata Pantulan Sinyal Dari Masing-masing Target ... 43
34. Fast Fourier Transform dengan Frekuensi 0 – 100 Hz pada Alur 1... 44
35. Fast Fourier Transform dengan Frekuensi 100 – 200 Hz pada Alur 1.... 45
36. Fast Fourier Transform dengan Frekuensi 200 – 300 Hz pada Alur 1.... 45
37. Fast Fourier Transform dengan Frekuensi 300 – 400 Hz pada Alur 1.... 46
38. Fast Fourier Transform dengan Frekuensi 400 – 500 Hz pada Alur 1.... 46
DAFTAR LAMPIRAN
Halaman
1. Sketsa Area Survei... 57
2. Spesifikasi C-Max Side Scan Sonar... 58
3. Bottom Sampling dan Jenis Substratnya... 61
4. Contoh Perhitungan Akustik Impedansi dan Backscattering strength ... 63
5. Contoh Perhitungan Dimensi Target yang Terdeteksi... 65
1. PENDAHULUAN
1.1 Latar Belakang
Dasar laut adalah bagian dari bumi yang wilayahnya belum terjelajahi secara keseluruhan, baik luas, kedalaman, maupun potensinya. Di dasar laut terdapat sumber daya alam yang penting bagi kehidupan manusia. Sumber daya yang paling dikenal dari dasar laut adalah sumber daya yang bernilai ekonomis seperti minyak dan gas bumi serta mineral. Sumber daya lain seperti biota laut dalam yang sangat potensial masih sulit untuk dimanfaatkan. Berbagai kegiatan yang dilakukan untuk menggali potensi sumber daya laut tersebut diantaranya dengan melakukan penelitian, pendeteksian dan penyapuan, serta menentukan objek-objek yang berada di dasar laut .
Salah satu cara untuk mendapatkan informasi tentang berbagai aspek dari dasar laut adalah dengan sistem akustik bawah air seperti side scan sonar. Instrumen side scan sonar merupakan perkembangan sonar yang mempunyai kemampuan menggandakan beam yang diarahkan pada satu sisi ke sisi lainnya sehingga mampu memetakan area penelitian secara efektif.
Penelitian tentang dasar laut dengan menggunakan side scan sonar yang telah dilakukan, seperti: (1) Interpretasi citra side scan sonar pada survei
peletakan pipa di Panaran – P. Pemping (Tobing, 2000), (2) Pemetaan struktur dasar dengan menggunakan sub bottom profiler dan side scan sonar (Lie, 2007), (3) Interpretasi side scan sonar untuk perencanaan peletakan kabel laut di perairan Kepulauan Seribu (Laswono, 2007). Penelitian yang telah dilakukan di daerah
Lhokeseumawe, juga menggunakan instrumen side scan sonar dimana bertujuan untuk pengecekan posisi pipa dan objek yang terdeteksi di dasar laut. Hal ini dilakukan agar penempatan target yang terrdeteksi tidak membahayakan bagi jalur pelayaran atau navigasi. Dalam pengecekan posisi pipa dan target yang terdeteksi yang diletakkan di dasar laut, informasi di sepanjang jalur yang dilewati perlu diketahui. Dalam hal ini informasi yang penting diperlukan adalah informasi tentang keadaan lingkungan, kondisi topografi, dan kedalaman. Setelah diketahui informasi yang didapat maka dilakukan interpretasi berdasarkan kualitas data, identifikasi objek, koreksi, dan perhitungan dimensi.
1.2 Tujuan
Tujuan dari penelitian ini adalah mendeteksi dan menginterpretasikan target di dasar laut menggunakan instrumen side scan sonar.
2. TINJAUAN PUSTAKA
2.1 Sonar
Sonar merupakan alat pendeteksian bawah air yang menggunakan gelombang suara untuk mendeteksi kedalaman serta benda-benda di dasar laut (http://id.wikipedia.org/wiki/Sonar,2 April 2009). Berdasarkan sistemnya, ada dua macam tipe sonar, yaitu sonar pasif dan sonar aktif. Sonar pasif hanya mendeteksi suara yang datang melalui hidrofon untuk mengubah energi suara menjadi energi listrik. Sonar pasif menggunakan frekuensi rendah yaitu 20 Hz-1000 Hz. Sonar aktif dapat mengirimkan sinyal dari sumber suara atau sensor serta dapat menerima kembali sinyal tersebut setelah dipantulkan oleh objek atau dasar laut melalui sensor yang sama (http://id.wikipedia.org/wiki/Sonar,2 April 2009).
Pada sonar aktif, energi listrik diubah menjadi energi suara oleh magnetostritif di transduser kemudian dipancarkan. Sinyal suara yang
dipancarkan akan diterima kembali oleh transduser setelah dipantulkan oleh objek atau dasar laut. Pantulan suara tersebut diterima oleh transduser dan dirubah kembali menjadi energi listrik.
2.2 Side Scan Sonar
Side scan sonar merupakan instrumen single beam yang mampu
menunjukkan gambar dua dimensional permukaan dasar laut dengan kondisi kontur, topografi, dan target secara bersamaan. Secara umum side scan sonar
terdiri dari tiga bagian besar yaitu recorder yang berada di atas kapal survei,
towfish yang ditarik dibelakang kapal, dan tow cable yang menghubungkan recorder dan towfish.
Side Scan Sonar mempunyai kemampuan menggandakan beam yang
diarahkan pada satu sisi ke sisi lainnya. Sehingga kita bisa melihat ke kedua sisi, memetakan semua area penelitian secara efektif dan menghemat waktu penelitian. SSS menggunakan narrow beam pada bidang horizontal untuk mendapatkan resolusi tinggi di sepanjang lintasan dasar laut (Klein Associates Inc, 1985).
SSS menggunakan prinsip backscatter akustik dalam mengindikasikan atau membedakan kenampakan bentuk dasar laut atau objek di dasar laut (Russel, 2001 dalam Edi, 2009). Material seperti besi, bongkahan, kerikil atau batuan vulkanik sangat efisien dalam merefleksikan pulsa akustik. Sedimen halus seperti tanah liat, lumpur tidak merefleksikan pulsa suara dengan baik (backscatter lemah). Reflektor kuat akan menghasilkan pantulan backscatter yang kuat sedangkan reflektor lemah menghailkan backscatter yang lemah. Dengan pengetahuan akan karakteritik ini, pengguna SSS dapat menguji komposisi dasar laut atau objek dengan mengamati pengembalian kekuatan akustik (Tritech International Limited, 2008).
Gelombang suara yang digunakan dalam teknologi side scan sonar biasanya mempunyai frekuensi antara 100 dan 500 kHz. Pulsa gelombang dipancarkan dalam pola sudut yang lebar mengarah ke dasar laut, dan gemanya diterima kembali oleh receiver dalam hitungan detik. Perekaman perlu mengikuti pola lintasan survei tertentu dengan menggunakan peralatan penentu posisi GPS dan video plotter.
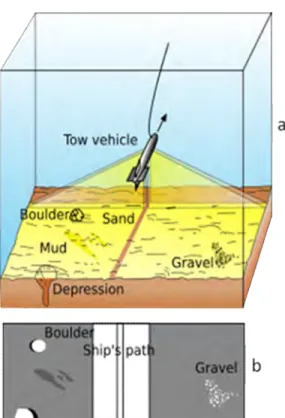
Energi suara yang dilepas oleh side scan sonar sebagian diserap oleh dasar perairan, sebagian lagi dipantulkan atau tersebar dengan kekuatan yang berbeda. Perbedaan kekuatan pantulan ini menyebabkan terjadinya perbedaan tampilan dari objek yang memantulkan energi suara tersebut ( http://en.wikipedia.org/wiki/Side-scan_sonar, 3 Februari 2009). Contohnya batu dan logam akan memantulkan energi yang lebih kuat sehingga menghasilkan gambaran yang lebih jelas dari pada lumpur yang cenderung menyerap energi sehingga menciptakan pantulan yang lemah dan gambaran yang kurang jelas (Gambar 1).
Side scan sonar mampu membedakan besar kecil partikel penyusun
permukaan dasar laut seperti batuan, lumpur, pasir, kerikil, atau tipe-tipe dasar perairan lainnya. Instrumen ini mampu menangkap gelombang pasir atau riak-riak kecil yang tingginya beberapa sentimeter serta mampu memberikan informasi dengan rinci tentang kondisi topografi dasar tidak hanya pada posos persis di bawah towfish namun juga pada kedua sisinya dengan baik.
Dalam survei hidrografi, side scan sonar mempunyai empat fungsi utama, yaitu mendeteksi kapal karam dan bahaya navigasi, mendeteksi keberadaan dasar laut, mendeteksi gerakan-gerakan dasar laut, dan mendapatkan kumpulan data tekstur laut yang dapat dikombinasikan dengan contoh-contoh dasar laut (bottom
Gambar 1. (a) Diagram Side Scan Sonar dan (b) Citra Side Scan Sonar Sumber : http://en.wikipedia.org/wiki/Side-scan_sonar.
2.3 Instalasi Side Scan Sonar 2.3.1 Ketinggian towfish
Ketinggian towfish merupakan posisi towfish terhadap permukaan dan dasar laut. Jika towfish dioperasikan dekat permukaan air maka surface return terekam lebih dekat terhadap output pulsa dibandingkan dengan bottom return dan begitu sebaliknya. Saat towfish dioperasikan jauh dari permukaan air maka
surface return terekam menjauhi terhadap output pulsa dibandingkan dengan bottom return.
Ketinggian towfish di atas dasar laut merupakan salah satu faktor penting yang dapat mempengaruhi tampilan sonar. Melayangnya towfish yang terlalu tinggi dari dasar laut mengakibatkan hilangnya gambar yang bagus karena adanya
celah diantara side lobes. Towfish yang terlalu rendah akan mengurangi jarak akibatnya hanya tepi bagian main beam yang mencapainya,
Cara memberikan bayangan kontak yang baik, diperlukan keseimbangan antara jarak dan syarat-syarat keselamatan. Umumnya towfish harus berjarak dari dasar 10-20% dari jarak yang digunakan. Sebagai contoh, jika jaraknya 300 meter, maka towfish harus berjarak 30-50 meter dari dasar laut.
2.3.2 Jarak horizontal towfish
Pada saat perekaman, sounding boat bergerak sejajar mengikuti arah atau haluan dari objek yang terdeteksi. Pada saat perekaman, harus ada dilakukan koreksi jarak horizontal dari antena sampai ke towfish. Jarak towfish terhadap objek akan mempengaruhi interpretasi rekaman akibat adanya slant range. Hal tersebut akan menimbulkan suatu kompresi atau distorsi, kemudian
mempengaruhi objek dan posisi objek.
2.3.3 Pemakaian range scale
Pengaturan range scale yang tepat berfungsi untuk menghindari terjadinya
second sweep return. Sebagai contoh range scale di set 150 meter berarti
rekaman sonar maksimum di kertas adalah berjarak 150 meter di bagian kanan dan kiri.
Jarak tersebut tidak menjamin bahwa towfish tidak menerima pulse return dari objek di luar jarak 150 meter. Misalkan ada objek pada jarak 170 meter dan termasuk klarifikasi strong objek dimana range scale yang dipakai 150 meter, maka objek akan terekam pada jarak 20 meter.
2.4 Prinsip Kerja Side Scan Sonar
Secara umum prinsip kerja side scan sonar digambarkan sesuai dengan Gambar 2. Pulsa listrik yang dihasilkan oleh recorder dikirim ke towfish melalui
towcable. Pulsa-pulsa listrik tersebut diubah menjadi energi mekanik. Hasil
perubahan tersebut berupa sinyal ultrasonic yang kemudian dipancarkan ke dasar laut. Kemudian sinyal ultrasonic tersebut dipantulkan kembali oleh dasar laut dan diterima towfish. Interval waktu dari pengembalian sinyal tesebut tergantung dari jarak antara towfish dengan titik pemantulannya. Selain itu besarnya amplitudo dan frekuensi sinyal ultrasonic, juga berbeda sesuai dengan jenis objek yang memantulkan sinyal ultrasonic tersebut.
Sinyal ultrasonic yang diterima oleh towfish dirubah kembali menjadi pulsa-pulsa listrik dan diteruskan ke recorder, selanjutnya direkam pada kertas
recorder yang terdapat di dalamnya. Hasil rekaman yang terdapat pada kertas recorder kemudian diinterpretasikan jenis objek di dasar laut atau keadaan
topografi dasar laut.
2.5 Interpretasi Citra Side Scan Sonar
Pengolahan citra Side Scan Sonar terdiri dari dua tahapan, yaitu real time
processing dan post processing. Tujuan real time processing adalah untuk
memberikan koreksi selama pencitraan berlangsung sedangkan tujuan post
processing adalah meningkatkan pemahaman akan suatu objek melalui
interprestasi (Mahyuddin, 2008 dalam Edi, 2009). Interpretasi pada post
processing dapat dilakukan secara kualitatif maupun kuantitatif. Interpretasi
secara kualitatif dilakukan untuk mendapatkan sifat fisik material dan bentuk objek, baik dengan mengetahui derajat kehitaman (hue saturation), bentuk (shape) maupun ukuran (size) dari objek atau target. Secara umum, berdasarkan bentuk eksternalnya, target dapat dibedakan menjadi buatan manusia (man made
targets) atau objek alam (natural targets). Pada umunya, objek buatan manusia
memiliki bentuk yang tidak beraturan (Klein Associates Inc, 1985).
Interprestasi secara kuantitatif bertujuan untuk mendefinisikan hubungan antara posisi kapal, posisi towfish dan posisi objek sehingga diperoleh besaran horisontal dan besaran vertikal. Besaran horisontal meliputi nilai posisi objek ketika lintasan towfish sejajar dengan lintasan kapal maupun ketika lintasan dengan towfish membentuk sudut. Besaran vertikal meliputi tinggi objek dari asar laut serta kedalaman objek (Mahyuddin, 2008).
Pada dasarnya, prinsip penginterpretasian ini sama dengan
penginterpretasian pada penginderaan jarak jauh, yaitu dengan menggunakan kunci-kunci interpretasi. Kunci-kunci interpretasi yang dapat digunakan adalah bentuk (shape), ukuran (size), bayangan (shadow), derajat kehitaman (tone), tekstur, dan pola (pattern). Kesempurnaan interpretasi citra side scan sonar
ditentukan oleh tiga faktor yaitu tuning recorder (light or dark), towing operation, dan operator skill. Ketiga faktor tersebut sangat berpengaruh terhadap
penginterpretasian citra side scan sonar. Human skill ikut menentukan hasil analisa rekaman side scan sonar. Sebagai contoh, operator/surveyor mampu membedakan projection dan depression. Projection adalah objek yang timbul dari dasar laut, sedangkan depression adalah cekungan yang berada di dasar laut.
2.6 Sedimen Dasar Laut
Sedimen adalah kerak bumi (regolith) yang ditransportasikan melalui suatu proses hidrologi dari suatu tempat ke tempat lain, baik secara vertikal maupun secara horizontal. Proses sedimentasi diperairan meliputi rangkaian pelepasan (detachment), pengangkutan (transportation), dan pengendapan (deposition) dari partikel-partikel sedimen. Proses pengangkutan meliputi empat cara yaitu butiran dalam bentuk tersuspensi (suspension), melompat (saltation), berputar (rolling), dan menggelinding (slidding). Selanjutnya butiran-butiran tersebut mengendap akibat aliran air tidak dapat mempertahankan geraknya (Friedman dan Sanders, 1978). Ukuran partikel-partikel sedimen sangat ditentukan oleh sifat-sidat fisik mereka dan akibatnya sedimen yang terdapat diberbagai tempat di dunia mempunyai sifat yang sangat berbeda satu dengan lainnya. Contohnya sebagian besar dasar laut yang dalam ditutupi oleh jenis-jenis partikel yang berbutir halus yang terdiri dari sedimen halus, sedangkan hamper semua pantai ditutupi oleh jenis partikel yang berbutir kasar yang terdiri dari sedimen kasar (Hutabarat dan Evans, 2000).
Ukuran-ukuran partikel sedimen merupakan suatu cara yang mudah untuk menentukan klasifikasi sedimen. Menurut Wentworth (1992), sedimen berukuran besar yang berdiameter 256 mm diklasifikasikan ke dalam boulder (batu
berukuran besar yang berasal dari kikisan arus air), sand (pasir) adalah partikel yang berukuran diameter 0.063-2 mm, silt (lanau) partikel yang berdiameter 0.063-0.004 mm dan clay (lempung) adalah partikel yang berdiameter lebih kecil dari 0.004 mm. Berikut klasifikasi sedimen berdasarkan ukuran partikelnya (Tabel 1).
Sedimen dapat diklasifikasikan menurut asal dan ukuran partikelnya. Menurut asalnya sedimen dapat digolongkan menjadi tiga bagian yaitu
lithogenous, biogenous, dan hydrogenous (Gross, 1993). Sedimen yang berasal
dari batuan (lithogenous) umumnya berupa mineral silikat yang berasal dari hancuran batuan. Sedimen yang berasal dari organisme (biogenous) berupa sisa-sia tulang, gigi, atau cangkang organisme yang dapat digolongkan kedalam dua tipe utama yaitu tipe calcareous dan siliceous, dan sedimen yang dibentuk dari hasil reaksi kimia yang terjadi di laut (hydrogenous).
Ukuran partikel dapat digunakan untuk menjelaskan cara pengangkutan dan seberapa jauh partikel tersebut terbawa aliran sebelum diendapkan. Partikel yang berukuran besar akan diendapkan di daerah dekat pantai, sedangkan partikel yang lebih halus akan diendapkan pada daerah yang lebih jauh karena adanya aktivitas arus dan gelombang. Partikel halus yang terdiri dari lanau dan lempung akan terbawa ke arah laut dan diendapkan pada kedalaman dimana aktifitas gelombang tidak cukup kuat untuk mengaduk atau mengikis dasar perairan (Gross, 1993). Nybakken (1992) menambahkan bahwa substrat berpasir
umumnya dijumpai didaerah estuaria yang pengaruh arusnya kuat, karena hanya partikel yang berukuran besar yang akan lebih cepat mengendap sedangkan partikel yang berukuran kecil akan dipertahankan dalam suspense dan terbawa ketempat lain mengikuti arus dan gelombang.
Tabel 1. Ukuran partikel Sedimen Skala Wentworth (1992) dalam Stowie (1943) Fraksi Sedimen Partikel Sedimen Diameter (mm)
Boulder 256
Cobble 64
Pebble 4
Granule 2
Sand
Very coarse sand 1
Coarse sand ½
Medium Sand ¼
Fine Sand 1/8
Very fine sand 1/16
Silt
Coarse Silt 1/32
Medium Silt 1/64
Fine Silt 1/128
Very Fine silt 1/256
Clay
Coarse clay 1/640
Medium clay 1/1024
Fine Clay 1/2360
Very Fine clay 1/4096
2.7 Kecepatan Suara
Kecepatan suara adalah istilah yang digunakan untuk menyebut kecepatan gelombang suara yang melalui medium elastis. Kecepatan ini dapat berbeda tergantung medium yang dilewati (misalnya suara lebih cepat melalui udara daripada air), sifat-sifat medium tersebut, dan suhu. Namun, istilah ini lebih banyak dipakai untuk kecepatan suara di udara. Pada ketinggian air laut, dengan suhu 21 °C dan kondisi atmosfer normal, kecepatan suara adalah 344 m/detik atau 1238 km/jam (http://id.wikipedia.org/wiki/Kecepatan_suara, 2 November 2009).
Kemampuan dasar laut dalam mendukung suatu objek tergantung pada elastisitasnya, yaitu bulk modulus E dan modulus of rigity G. Hal ini terkait dengan kompresi dan kecepatan gelombang c dan cs, dimana ρ adalah densitas. Kecepatan suara pada sedimen bergantung pada tekanan dan suhu ( Hamilton, 1963 dalam Clay dan Medwin, 1977). Dengan asusmsi sederhana, dimana kecepatan suara di dalam sedimen dan air pada kedalaman z, suhu in situ dan salinitas adalah c(z) dan cw(z); kecepatan suara pada tekanan 1 atm, salinitas in situ, dan suhu referensi c(0) dan cw(0). Pengukuran c(0) dan cw(0) dilakukan
dengan mentransmisikan ultrasonic ping melalui beberapa centimeter pada sample. Menurut Horton (1974), ketergantungan c(z) pada frekuensi akan diabaikan.
(1)
Nilai porositas n, densitas ρ dan compressional velocity c dari berbagai jenis sedimen dapat dilihat pada tabel 2 (Hamilton, 1971a dalam Clay dan
Medwin, 1977). Pengukuran ini dilakukan di laboratorium menggunakan suhu 23̊̊ C dan tekanan 1 atm.
Target yang diduga pipa memiliki nilai densitas ρ dan compressional
velocity c yang tinggi, yaitu sebesar 8030 kg/cm3dan 2580 m/s (AK Steel
Tabel 2. Hasil Pengukuran Rata-rata dan Perhitungan Elastik Konstan pada berbagai jenis Sedimen
Jenis Hasil Pengukuran Hasil Perhitungan
n ρ c E Σ G cs
Continental Terace (shelf and slope)
Sand Coarse 38.6 2.03 1836 6.6859 0.491 0.1289 250
Sand Fine 43.9 1.98 1742 5.6877 0.469 0.3212 382
Sand Very Fine 47.4 1.91 1711 5.1182 0.453 0.5035 503
Silty Sand 52.8 1.83 1677 4.6812 0.457 0.3926 457
Sandy silt 68.3 1.56 1552 3.4152 0.461 0.2809 379
Sandy-silt-clay 67.5 1.58 1578 3.5781 0.463 0.2731 409
Calyey silt 75.0 1.43 1535 3.1720 0.478 0.1427 364
Silt claye 76.0 1.42 1519 3.1476 0.480 0.1323 287
Abyssal plain (turbidite)
Clayey silt 78.6 1.38 1535 3.0561 0.477 0.1435 312
Silty clay 85.8 1.24 1521 2.7772 0.486 0.0773 240
Clay 85.8 1.26 1505 2.7805 0.491 0.0483 196
Abyssal plain (pelagic)
Clayey silt 76.4 1.41 1531 3.1213 0.478 0.1408 312
Silty clay 79.4 1.37 1507 3.0316 0.487 0.0795 232
Clay 77.5 1.42 1491 3.0781 0.491 0.0544 195
Sumber : Hamilton (1971a) dalam Clay dan Medwin (1977) Keterangan:
n = porositas (%)
ρ = densitas (g/cm3; Mg/m3, dimana M = 106)
c = compressional wave (sound) velocity (m/s)
E = bulk Modulus (GN/m2, dimana G = 109)
σ = Rasio Poisson, dimana σ = (3E - ρc2)/( 3E + ρc2)
G = Rigity Modulus, dimana G = [(ρc2-E)3]/4 (GN/m2)
3. METODOLOGI
3.1 Waktu dan Lokasi Penelitian
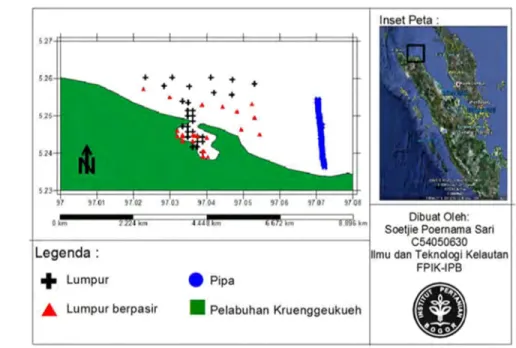
Pengambilan data dengan menggunakan side scan sonar dilakukan selama dua hari, yaitu pada 19-20 November 2008 di perairan Aceh, Lhokseumawe (Gambar 3). Sesuai dengan rencana survei, daerah yang dianggap memiliki target awalnya pada area I (luas area ABCD) berskala 1:5000 dan area II (luas area EFGH) berskala 1:1000 (Lampiran 1). Untuk mendapatkan target berupa pipa, maka dibuat area tambahan (AB’C’D).
Gambar 3. Peta Lokasi Penelitian
3.2 Alat dan Bahan
Beikut merupakan software yang digunakan dalam pengolahan data side
1. Softwarev Max View, merupakan perangkat lunak yang digunakan untuk mengekstrak data side scan sonar.
2. Software Matlab, digunakan untuk menghasilkan data-data dalam bentuk grafik,baik itu berupa nilai pantulan signal pada objek maupun data FFT. 3. Surfer versi 8.0 (Golden Software Inc) dan Arc View 3.2 GIS, digunakan
untuk membuat titik stasiun area survei.
4. Laptop, digunakan untuk menyimpan dan mengolah data penelitian. 5. Data yang digunakan merupakan data Dishidros TNI-AL.
Alat yang digunakan dalam pengambilan data kenampakan dasar laut adalah C-Max Side Scan Sonar dengan menggunakan frekuensi 325 kHz. Survei ini dilakukan mengunakan kapal nelayan setempat (15 GT). Penempatan C-Max
Side Scan Sonar dan laptop harus berada pada tempat yang aman dan mudah
dioperasikan, yaitu di daerah ruang kemudi.
3.3 Sistem Kerja Side Scan Sonar
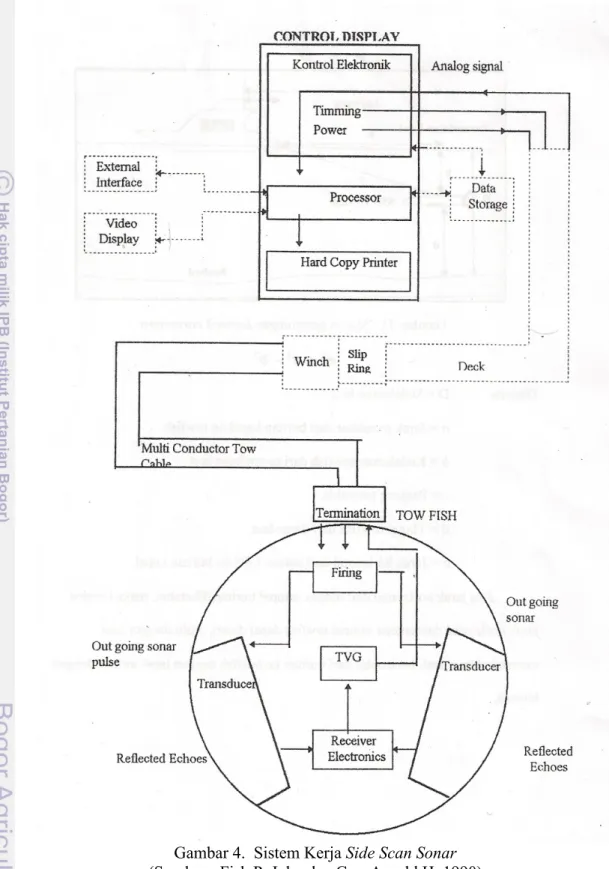
Menjelaskan blok diagram (Gambar 4) sistem side scan sonar
menggunakan kabel multi konduktor, komponen yang dipilih dilukiskan dalam dot. Unit kontrol/display (recorder) berisi elektronik-elektronik kontrol untuk pewaktuan pulsa sonar yang dipancarkan. Power dan trigger pulsa dipancarkan turun melalui tow cable. Jika menggunakan slip ring dan/atau sebuah winch, maka harus menggunakan penghubung “deck cable” yang digunakan antara
recorder dan slip ring. Dalam towfish, firing elektronik menyebabkan transducer
memancarkan pulsa sonar. Pengembalian echo dari pulsa tersebut diterima melalui transduser yang sama dan dikirimkan ke elektronik penerima. Sinyal
dikuatkan dan diaplikasikan pada kurva waktu penguatan yang divariasikan. Sinyal tersebut kemudian dipancarkan sepanjang konduktor dan dikembalikan ke
recorder.
Pada bagian ini sinyal didigitasikan dan diproses untuk dikoreksi. Kemudian dikirimkan ke printer atau video display. Data dari recorder tersebut dapat dikumpulkan pada magnetic tape atau komputer. Side scan sonar dikenal sebagai alat citra akustik yang digunakan untuk mencitrakan dasar laut. Sistem ini terdiri dari peralatan perekaman (recorder), sensor bawah air (transducer), dan kabel untuk menghubungkan keduanya.
Muatan kapasitor side scan sonar recorder pada towfish diteruskan melalui
towcable. Atas perintah dari recorder, power yang dikumpulkan ini ditumpukkan
ke transducer, dimana pancaran pulsa akustik merupakan propagasi langsung ke air. Kemudian dengan periode waktu yang sangat pendek, penerimaan echo dari dasar laut diterima melalui tranducer kemudian dikuatkan dengan satu kali variasi kurva penguatan dan dikirim ke recorder melalui towcable. Pada bagian
recorder, sinyal-sinyal yang diterima diproses lebih jauh, kemudian diubah
menjadi data digital dan dihitung posisi yang sebenarnya dalam rekaman akhir berupa piksel per piksel kemudian echo-echo ini dicetak diatas electrosensitive atau kertas thermal.
Gambar 4. Sistem Kerja Side Scan Sonar (Sumber : Fish P. John dan Carr Arnold H, 1990)
3.4 Pengambilan Data
3.4.1 Pengambilan Data Side Scan Sonar
Pengambilan data dilakukan dengan menggunakan instrumen CM (C-Max)
Side Scan Sonar yang ditarik di belakang kapal dan biasanya menggunakan towfish atau tow vehicle. Instrumen ini menggunakan pulsa gelombang akustik
yang memancar secara horizontal ke arah sisi kapal dan menyapu permukaan dasar laut pada kedua sisinya tersebut. C-Max Side Scan Sonar ini dapat dioperasikan dengan menggunakan dua buah frekuensi tinggi,yaitu frekuensi tinggi (500 kHz) dan frekuensi rendah (100 kHz) serta mempunyai transducer yang memancarkan sonar dari kedua sisinya (Gambar 5).
Pada saat pengambilan data ditentukan posisi target yang dicurigai dan disesuaikan dengan kondisi perairannya. Metode pengukuran posisi yang akurat diperlukan untuk mendapatkan ketelitian posisi yang baik, yaitu dengan
menggunakan alat GPS receiver dengan metode Diferensial, dimana posisi yang diukur akan dikoreksikan terhadap suatu titik di darat yang mana posisinya sudah diketahui dengan pasti dari hasil pengukuruan dengan ketelitian yang tinggi.
Setelah posisi target yang terdeteksi ditentukan, maka dilakukan penyapuan data dengan menggunakan instrumen CM (C-Max) Side Scan Sonar untuk mendapatkan hasil gambaran objek di dasar laut. Untuk menghasilkan gambaran yang baik sesuai dengan apa yang diinginkan, maka perlu dilakukan pengontrolan terhadap recorder, tow cable, maupun towfish. Berikut diagram alir pengambilan data side scan sonar (Gambar 6).
Gambar 6. Diagram alir pengambilan Data Side Scan Sonar
3.4.2 Pengambilan Data Substrat
Pengambilan data substrat ini dilakukan untuk mengetahui jenis substrat yang mendominasi pada area yang diteliti. Contoh substrat diambil pada dua area sesuai dengan rencana operasi. Pada area pertama atau daerah kolam (skala 1:1000), pengambilan data substrat di lakukan pada 41 titik, dan area kedua (skala 1:5000), pengambilan data substrat dilakukan pada 19 titik. Pengambilan contoh ini dilakukan secara acak sesuai dengan titik yang telah ditentukan dengan menggunakan Van veen grab dengan luas bukaan sebesar 20 x 20 cm2. Contoh substrat/sedimen yang diambil dimasukkan ke dalam kantung plastik yang selanjutnya dianalisis dengan metode ayakan bertingkat.
3.5 Pemrosesan Data
3.5.1 Pemrosesan Data Akustik
Data citra side scan sonar yang di dapat kemudian di olah di software
MaxView untuk melihat hasil gambaran yang didapat. Pengolahan pada software MaxView dilakukan setiap lima detik, dan ini dilakukan selama proses perekaman
berlangsung. Hasil gambaran yang diperoleh berupa nilai-nilai pantulan sinyal dari target/objek yang terekam selama penyapuan. Nilai-nilai pantulan sinyal ini kemudian diolah lagi, sehingga didapat hasil dalam bentuk Discrete Fourier
Transform (DFT) dan Fast Fourier Transform (FFT). Hasil perekaman berupa
citra side scan sonar, diidentifikasi untuk melihat apakah ada objek atau target yang dicurigai. Target yang terdeteksi kemudian dihitung nilai akustik impedansi dan koefisien refleksinya. Proses selanjutnya adalah, objek atau target tersebut dihitung dimensinya, baik itu berupa tinggi, lebar, maupun panjang objek itu sendiri. Berikut diagram alir pemrosesan data akustik (Gambar 7).
3.5.2 Pemrosesan Data Substrat/Sedimen
Pengolahan data fisik sedimen dilakukan dengan metode ayak basah menggunakan ayakan bertingkat untuk memisahkan butiran sedimen berdasarkan fraksi ukuran butiran. Fraksi-fraksi ditentukan berdasarkan segitiga Shephard (1954), tiap fraksi dibagi atas:
1. Fraksi kerikil (gravel), merupakan gabungan material ukuran kerikil dan kerakal.
2. Fraksi pasir (sand), merupakan gabungan material ukuran pasir halus sampai kasar.
3. Fraksi lumpur (mud), merupakan gabungan material lempung dan lanau. Segitiga Shepard yang digunakan dalam klasifikasi jenis sedimen merupakan pembagian atas tiga jenis sedimen, yaitu pasir, lanau, dan lempung. Metode segitiga Shephard lebih sesuai digunakan untuk klasifikasi pada sampel dengan ukuran butiran yang cenderung kecil dibandingkan dengan metode segitiga Folk. Skema Segitiga Shepard dapat dilihat pada Gambar 8.
Gambar 8. Diagram Segitiga Shepard (Sumber: Shepard 1954)
3.6 Analisis Data 3.6.1 Kualitas Data
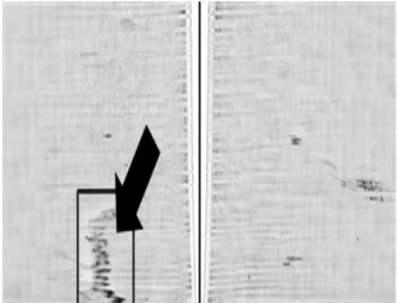
Kualitas data side scan sonar sangat bergantung pada saat pengambilan data itu sendiri. Ada beberapa faktor yang mempengaruhi dalam pengambilan data, antara lain kesalahan surveyor, kesalahan alat, dan lingkungan sekitar/alam. Faktor lingkungan yang menyebabkan citra side scan sonar kurang baik adalah sebagai berikut:
a. Noise yang ditimbulkan oleh buih akibat perputaran propeller sounding boat dan propeller kapal lain yang melintas disekitar area survei.
b. Kondisi perairan yang dangkal sehingga towfish terlalu dekat dengan dasar laut.
c. Penarikan dan penguluran towcable.
d. Salinitas, velocity, dan temperatur di sekitar perairan daerah yang di survei dapat mempengaruhi perambatan gelombang akustik.
e. Pengaruh cuaca disekitar area survei. Cuaca ini dapat mempengaruhi kestabilan kapal pada saat sounding. Hal ini akan mempengaruhi
penangkapan gelombang akustik hasil pantulan dari dasar laut atau objek yang dikenai dan berpengaruh terhadap besaran objek.
Pada Gambar 9 terlihat data side scan sonar yang kurang baik, karena objek yang terdeteksi tidak terdefinisikan dengan baik.
Gambar 9. Contoh Kualitas Data Side Scan Sonar
3.6.2 Identifikasi Objek
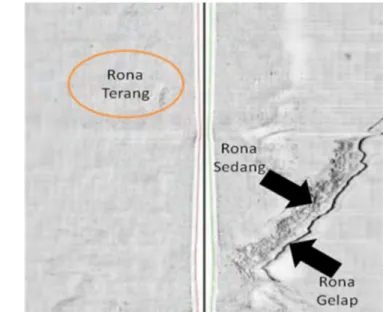
Berdasarkan sebaran rona yang dihasilkan dari perbedaan kekuatan pantulan gelombang akustik (Gambar 10) dari objek di dasar laut yang di dasar laut yang berhubungan dengan jenis material dari sedimen penutup, maka
rekaman side scan sonar daerah survei dapat dibedakan menjadi tiga bagian yaitu sebagai berikut.
(1) Rona Terang (Low Sonar Reflectivity)
Rona terang ditafsirkan sebagai objek dasar laut yang bersifat homogen, lunak, dan relatif datar. Rona terang tersebut diduga sebagai dasar laut yang dialasi oleh lapisan sedimen berbutir halus (lanau, lumpur, atau pasir)
(2) Rona Sedang (Moderate Sonar Reflectivity)
Rona sedang ditafsirkan sebagai objek dasar laut yang agak keras. Rona sedang dapat berupa lapisan sedimen berbutir lebih kasar dengan sebaran (pecahan) terumbu karang kecil.
(3) Rona Gelap (High Sonar Reflectivity)
Rona gelap diperkirakan sebagai material dasar laut yang keras baik itu berupa jatuhan benda logam, beton, dan singkapan terumbu karang tua yang dicirikan dengan rona yang sangat gelap dan terlihat kontras dengan lingkungan sekitarnya.
Gambar 10. Contoh Citra Side Scan Sonar Berdasarkan Rona Terang, Rona Sedang, dan Rona Gelap
3.6.3 Koreksi
Dalam menentukan posisi suatu objek yang sudah teridentifikasi di dasar laut yang berupa material jatuhan logam, beton, dan pecahan karang kita harus melakukan koreksi terlebih dahulu, karena posisi objek terdapat di belakang kapal dan juga di bagian kanan atau kiri towfish. Dalam hal ini untuk ketelitian posisi suatu objek tergantung dari skala peta yang diinginkan. Koreksi dalam
menentukan posisi objek terbagi dua yaitu slant range corection dan layback
(1) Slant Range Correction
Slant range adalah jarak antara suatu objek di dasar laut dengan towfish,
sedangkan slant range correction adalah jarak horizontal suatu objek di dasar laut dengan titik dasar laut di bawah towfish. Pada koreksi ini suatu objek
diumpamakan terletak di sebelah kiri atau kanan towfish, sehingga untuk
mendapatkan slant range correction dapat dihitung dengan menggunakan rumus phytagoras sebagai berikut (Gambar 11).
Gambar 11. Skema perhitungan slant range correction
(2) Dimana: a = Slant range correction
b = Tinggi towfish terhadap dasar laut c = Slant range
(2) Layback Correction
Layback correction adalah jarak mendatar dari antena GPS terhadap posisi towfish di belakang kapal. Tujuan penghitungan ini adalah untuk menentukan
posisi towfish sebenarnya. Seperti halnya slant range correction, perhitungan
layback correction (Gambar 12) juga dihitung dengan menggunakan rumus phytagoras sebagai berikut:
Gambar 12. Skema perhitungan layback correction
(3) Dimana D = kedalaman laut.
a = Jarak mendatar dari buritan kapal ke towfish. b = Kedalaman towfish dari permukaan laut c = Panjang towcable.
d = Tinggi towfish dari dasar laut.
e = Jarak horizontal dari antena GPS ke buritan kapal.
Jika jarak horizontal dari antena sampai buritan diketahui, maka koreksi jarak horizontal dari antena sampai towfish dapat dicari, yaitu dengan cara
menambahkan jarak horizontal dari buritan ke towfish dengan jarak antena dengan buritan (gambar 13).
Gambar 13. Skema perhitungan layback correction
(1) Perhitungan Panjang Objek
Perhitungan panjang dimaksudkan untuk mengetahui seberapa panjang suatu objek yang berada di dasar laut yang terlihat dari hasil citra side scan sonar. Caranya yaitu membandingkan panjang suatu objek dan jarak antar fix di citra
side scan sonar dengan jarak antar fix dilapangan.
(4)
Dimana S1= Jarak antar fiks di lapangan (meter)
S2= Jarak antar fiks di citra side scan sonar (meter)
s1= Panjang objek di lapangan
s2= Panjang objek di citra
(2) Perhitungan Lebar Objek
Perhitungan lebar dimaksudkan untuk mengetahui seberapa lebar suatu objek dilapangan. Caranya sama dengan untuk mencari panjang objek.
(5)
Dimana L1= lebar antar fix di lapangan (meter)
L2= lebar antar fix di citra side scan sonar (meter)
l1 = lebar objek di lapangan
l2 = lebar objek di citra
(3) Perhitungan Tinggi Objek
Perhitungan tinggi dimaksudkan untuk mengetahui tinggi suatu objek di lapangan. Pada perhitungan tinggi objek (Gambar 14) caranya hampir sama dengan perhitungan untuk mencari panjang atau lebar suatu objek tetapi.
Gambar 14. Skema perhitungan tinggi objek
(6)
Dimana A = tinggi towfish (meter) B = slant range (meter) C = tinggi objek (meter) D = panjang bayangan (meter)
3.6.5 Akustik Impedansi dan Backscattering strength
Gambar 15 menggambarkan bagaimana suatu target memancarkan sinyal kemudian memantulkannya kembali. Akustik impedansi Z dan koefisien refleksi
R digunakan untuk menentukan seberapa besar/kuat nilai dari pantulan suatu
objek .
(7)
(8) Keterangan:
ρ1 = densitas medium 1 (kg/m3)
c1 = kecepatan gelombang kompresi medium 1 (m/s)
ρ2 = densitas medium 2 (kg/m3)
c2 = kecepatan gelombang kompresi medium 2 (m/s)
R = Koefisien refleksi (kg/m2s)
Backscattering strength dasar perairan merupakan fungsi dari hamburan
yang dihasilkan oleh permukaan dan volume sedimen. Pada penelitian ini, nilai
backscattering strength diukur berdasarkan perbandingan nilai pantulan yang
sudah dihasilkan oleh parameter objek itu sendiri. Berikut merupakan persamaan (Persamaan 9) yang digunakan untuk menghitung nilai backscattering strength lumpur dan lumpur berpasir.
(9)
Keterangan:
SS = Backscattering strength (dB)
Ir = Intensitas sinyal yang dipantulkan (Voltage/div) Ii = Intensitas sinyal yang diterima (Voltage/div) A = Luasan area
4. HASIL DAN PEMBAHASAN
4.1 Hasil Pengambilan Contoh Dasar
Gambar 16 merupakan hasil dari plot bottom sampling dari beberapa titik yang dilakukan secara acak untuk mengetahui dimana posisi target yang dicurigai.
Sumber: Lampiran 3. Bottom Sampling dan Jenis Substrat Gambar 16. Lokasi Bottom Sampling dan Pipa
Pada umumnya tipe substrat dasar perairan hasil survei berupa lumpur dan lumpur berpasir (Lampiran 3). Sebagian besar sedimen permukaan dasar laut yang ditemukan pada tiap titik atau stasiun yang diambil secara acak di lokasi penelitian berupa lumpur dan lumpur berpasir.
Proses pengambilan contoh sedimen dilakukan menggunakan Van Veen
Grab dengan luas bukaan 20x20 cm2. Sesuai dengan rencana operasi
41 titik secara acak dan pada skala 1:5000 diambil 19 titik, dan ini juga dilakukan secara acak.
Sedimen fraksi lumpur sangat mudah terbawa arus dan mudah teraduk apabila terjadi upwelling atau proses turbulensi. Pengendapan fraksi lumpur sangat lambat, sehingga posisi lumpur selalu di atas dari lapisan permukaan dasar laut. Pada Gambar 33 terlihat penyebaran fraksi lumpur secara merata di lokasi penelitian. Semakin ke arah laut terlihat penyebarannya semakin besar
dibandingkan dengan lumpur berpasir. Salah satu penyebabnya adalah berupa arus dan gelombang, dimana perairan yang berada jauh dari pantai akan sedikit mendapat pengaruh gelombang dibandingkan dengan daerah pantai, sehingga di daerah dekat pantai lumpur akan sulit mengendap karena ukurannya yang mikroskopis dan mudah terbawa oleh air laut.
Pemplotan pipa dilakukan untuk mengetahui dimana keberadaan pipa yang ada di dasar laut. Posisi fiks yang didapat, kemudian diplotkan kedalam gambar. Pada gambar 33, dapat dilihat bahwa pipa terletak pada 5. 230LU – 5.260LU dan 97.070BT – 97.0750BT.
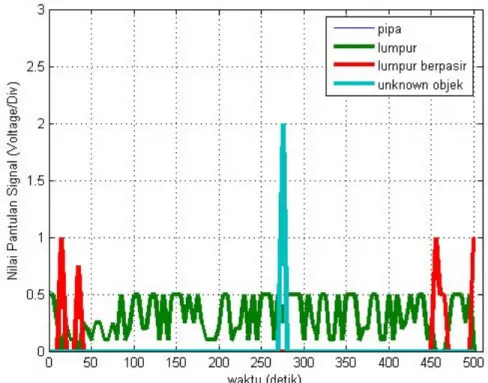
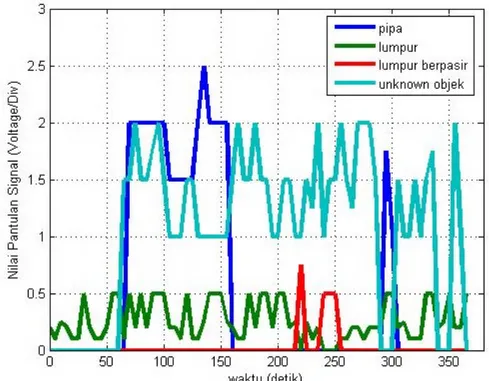
4.2 Pantulan Sinyal Taregt
Gambar dibawah ini (Gambar 17-32), merupakan hasil dari pengolahan data nilai pantulan sinyal objek atau target yang dicurigai. Adapun objek atau target yang dicurigai yaitu berupa pipa, substrat (lumpur dan lumpur berpasir), dan objek keras lainnya. Nilai pantulan sinyal ini diolah di perangkat lunak
MaxView. Pengolahan data pada MaxView dilakukan setiap lima detik selama
Gambar 17. Hubungan Nilai Pantulan Sinyal Terhadap Waktu Pada Alur 1
Gambar 19. Hubungan Nilai Pantulan Sinyal Terhadap Waktu Pada Alur 3
Gambar 21. Hubungan Nilai Pantulan Sinyal Terhadap Waktu Pada Alur 5
Gambar 23. Hubungan Nilai Pantulan Sinyal Terhadap Waktu Pada Kolam 2
Gambar 25. Hubungan Nilai Pantulan Sinyal Terhadap Waktu Pada Kolam 4
Gambar 27. Hubungan Nilai Pantulan Sinyal Terhadap Waktu Pada Kolam 6
Gambar 29. Hubungan Nilai Pantulan Sinyal Terhadap Waktu Pada Kolam 8
Gambar 31. Hubungan Nilai Pantulan Sinyal Terhadap Waktu Pada Lajur 176
Penelitian tentang Deteksi dan Interpretasi Target di Dasar Laut menggunakan Side Scan Sonar ini dilakukan di perairan Aceh Timur,
Lhokseumawe. Jenis Side Scan Sonar (SSS) yang digunakan adalah C- Max Side
Scan Sonar dengan frekuensi 325 kHz dan range 100 meter.
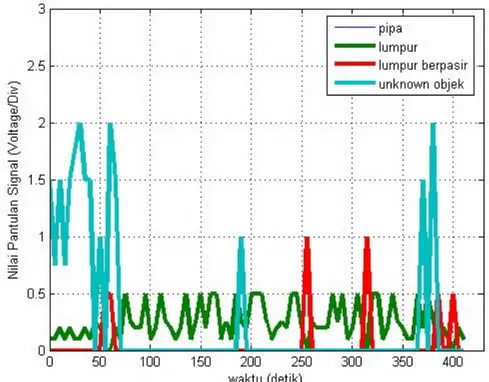
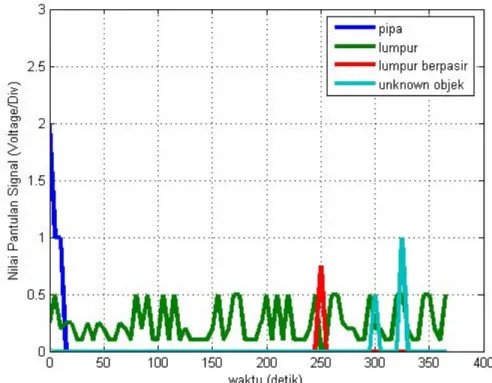
Kualitas perekaman side scan sonar sangat ditentukan oleh kondisi lapangan seperti kedalaman perairan, kekuatan arus, serta kemampuan towfish dalam mengirim dan memantulkan kembali sinyal yang dipancarkan. Secara umum, side scan sonar ini penafsirannya didasarkan pada kemampuan towfish dalam menerima perbedaan dari kekuatan pantulan gelombang akustik dari variasi material di dasar laut. Hasil perekaman citra yang didapat dari instrumen SSS ini, mendapatkan empat target yang dicurigai yaitu pipa, substrat dasar laut berupa lumpur dan lumpur berpasir, serta objek keras lainnya. Target yang dideteksi ini diinterpretasikan berdasarkan rona, yaitu rona gelap, rona sedang, dan rona terang. Semakin gelap suatu rona dari target yang dicurigai maka nilai pantulannya akan semakin tinggi.
Hasil dari perekaman citra SSS, kemudian diolah dengan menggunakan perangkat lunak MaxView untuk mendapatkan hasil nilai pantulan sinyalnya. Pengambilan data untuk proses pengolahan dilakukan setiap lima detik. Nilai pantulan sinyal ini didasarkan dari objek yang terdeteksi. Dari hasil pengolahan tersebut didapat bahwa nilai pantulan sinyal pipa, lumpur, lumpur berpasir, dan objek keras lainnya adalah 0-2.5 Voltage/Div, 0-0.5 Voltage/Div, 0.5-1
Voltage/Div, dan 0-2.5 Voltage/Div. Hasil yang didapat kemudian diolah lagi untuk mendapatkan suatu bentukan grafik sinyal. Pengolahan ini dilakukan dengan menggunakan perangkat lunak Matlab 7.0.1.
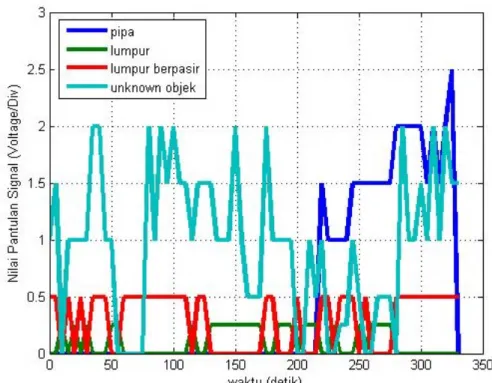
Hasil perhitungan sinyal tadi dapat dijelaskan sebagai berikut. Dimisalkan area yang diambil adalah lajur 177, dimana target yang dicurigai berupa pipa, lumpur, lumpur berpasir, dan objek keras lainnya. Disini, objek keras yang dimaksud adalah selain pipa, misalnya batu-batuan besar, puing-puing, atau objek yang tidak dapat didefinisikan karena adanya distorsi pada saat perekaman. Setelah diketahui target yang dicurigai, maka dilakukan pembacaan sinyal dari masing-masing target. Setiap lima detik, proses pembacaan dilakukan sampai proses perekaman selesai. Apabila proses pembacaan selesai, maka nilai-nilai dari pantulan sinyal yang terekam diplotkan dalam satu grafik untuk
mempermudah dalam penginterpretasian. Pada lajur 177 ini diketahui bahwa nilai pipa lebih tinggi dibandingkan dengan nilai lumpur, lumpur berpasir, dan objek keras lainnya. Ini dikarenakan pipa pada saat perekaman, hasil yang didapat ronanya lebih gelap, komposisi materialnya lebih padat sehingga, pada saat perekaman, nilai pantulan sinyal yang diberikan oleh alat dipantulkan kembali tanpa ada penyebaran atau penerusan sinyal oleh objek yang terdeteksi. Atau jika penerimaan sinyal yang diterima oleh suatu target yaitu pipa tepat pada titik pusatnya, maka hasil dari nilai yang dipantulkan akan sama besarnya. Lain halnya dengan substrat, nilai pantulannya lebih rendah dibandingkan dengan pipa dan objek keras lainnya.
Substrat berlumpur (rona terang), komposisi partikelnya tidak tersusun kompak, sehingga pada saat alat memancarkan sinyal, maka sinyal yang diterima oleh substrat lumpur sebagian besar tersebar, sehingga pemantulannya sinyalnya akan lebih rendah, berbeda dengan pantulan sinyal yang diberikan oleh substrat lumpur berpasir. Hal ini juga dapat dilihat dari kekasaran dan kekerasan dari
substrat yang terdeteksi. Pada frekuensi rendah, dimana panjang gelombang akustik lebih besar dari skala kekasaran dasar laut, maka dasar laut akan tampak lembut. Dalam hal ini pemantulan sinyal yang di dilakukan oleh dasar laut akan didominasi oleh penyebaran dasar laut. Jika menggunakan frekuensi tinggi dimana panjang gelombang akustik lebih kecil dari skala penyebaran kekasaran dasar laut, maka penyebaran kekasaran dapat mendominasi sinyal yang
dikembalikan sehingga dianggap kasar.
Gambar 33, merupakan hasil dari pembacaan sinyal pada software
MaxView secara keseluruhan. Nilai pipa dan objek keras memiliki nilai pantulan
yang sama besar yaitu 2.5 Voltage/Div, sedangkan substrat lumpur memiliki nilai pantulan yang lebih kecil (0.5 Voltage/Div) dibandingkan dengan target lainnya.
Gambar 33. Nilai rata-rata pantulan sinyal dari target
4.3 Analisis Fast Fourier Transform (FFT)
Pada Gambar 34-38, merupakan salah satu hasil dari analisis spektral akustik yang dilakukan untuk mentransformasikan suatu pergerakan sinyal dari
domain waktu menjadi domain frekuensi dan hasil analisis spectral akustik lainnnya dapat dilihat pada Lampiran 6. Pengolahan data dibagi menjadi 5 bagian frekuensi yaitu 0-100 Hz, 100-200 Hz, 200-300 Hz, 300-400 Hz, dan 400-500 Hz. Sumbu x merupakan nilai dari frekuensi (Hz), sedangkan sumbu y merupakan hasil dari perhitungan spectrum energi menggunakan perangkat lunak Matlab
7.0.1 dimana variabel pada sumbu y diubah kedalam bentuk logaritma. Berikut
hasil dari analisis spektral akustik yang dilakukan dengan menggunakan perangkat lunak Matlab 7.0.1.
Gambar 35. Fast Fourier Transform dengan Frekuensi 100 – 200 Hz pada Alur 1
Gambar 37. Fast Fourier Transform dengan Frekuensi 300 – 400 Hz pada Alur 1
FFT merupakan suatu algoritma untuk memghitung Discrete Fourier
Transform (DFT) dengan substansi waktu yang tersimpan lebih dari metode
konvensional. FFT ini mentransformasikan suatu sinyal dari domain waktu ke domain frekuensi. FFT berfungsi untuk melihat seberapa signifikan energi yang dihasilkan dari suatu data berdasarkan frekuensi (Hz). Pada proses pengolahan FFT, banyaknya sampel yang diambil sesuai dengan data yang diperoleh. Jumlah banyaknya data sebesar 2n. Setelah itu, dilakukan proses pengolahan berdasarkan
syntax sederhana pada software Matlab 7.0.1. Proses pengolahan sebelum
menghasilkan data dalam FFT, dilakukan proses pengolahan dalam hasil DFT. Hasil yang didapat kemudian diolah lagi untuk mendapatkan hasil bentukan dalam domain frekuensi.
Dari hasil pengolahan sinyal domain waktu yang diolah dengan perangkat lunak Matlab 7.0.1, sinyal yang dihasilkan kemudian diubah menjadi domain frekuensi, didapat hasilnya bahwa pipa memiliki nilai spektrum yang paling tinggi dibandingkan dengan objek keras dan substrat (pasir dan pasir berlumpur). Akan tetapi ada di satu area, nilai objek keras lebih signifikan dibandingkan dengan target lainnya, dan untuk substrat, nilai yang signifikan terdapat pada substrat lumpur berpasir. Hal ini ada kaitannya dengan nilai akustik impedansi dari target yang dicurigai. Semakin keras objek yang terdeteksi maka impedansi akustiknya juga semakin tinggi. Akan tetapi tidak selamanya objek keras memiliki nilai pantulan yang sangat tinggi, mungkin saja pada saat perekaman letak dari posisi alat terlalu dekat dengan target, atau terjadinya distorsi pada saat perekaman berlangsung. Jika hal ini terjadi, maka akan dapat mengganggu proses pengolahan data pada tahap selanjutnya.
Pada gambar 34-38, dapat dilihat masing-masing target memperlihatkan puncak tertinggi dari hasil pengolahan perangkat lunak Matlab 7.0.1. Pada frekuensi 0-100 Hz, target yang diduga pipa hanya memiliki dua puncak, yaitu pada frekuensi 30 Hz dan 80 Hz. Pada objek yang tidak diketahui (unknown objek), target ini memiliki 3 puncak dari hasil pengolahan menggunakan perangkat lunak Matlab 7.0.1, yaitu pada frekuensi 15 Hz, 45 Hz, dan 75 Hz. Target berupa lumpur dan lumpur berpasir pada frekuensi 0-100 Hz, tidak memperlihatkan puncak tertingginya, dan akan kelihatan pada saat pengolahan dengan frekuensi 100-500Hz.
Gambar 39. Nilai rata-rata analisis FFT dari target
Gambar 39 dilakukan plot data secara keseluruhan dari hasil pengolahan FFT. Dapat dilihat bahwa pipa memiliki nilai yang paling signifikan
dibandingkan dengan target lainnya yaitu sebesar 1412 Volt/dB, sedangkan substrat lumpur memiliki nilai yang paling kecil yaitu sebesar 106.2367 Volt/dB. Gambar 39 ini merupakan hasil pengolahan syntax sederhana menggunakan
perangkat lunak Matlab 7.0.1, dimana sumbu y masih dalam bentuk linier dan belum diubah dalam bentuk logaritma.
4.4 Akustik Impedansi dan Backscattering Strength (SS)
Berikut merupakan hasil perhitungan akustik impedansi dan koefisien refleksi berdasarkan nilai densitas ρ dan kecepatan gelombang kompresi c serta perhitungan nilai backscattering strength dari masing-masing target. Akustik impedansi ini menggambarkan seberapa besar nilai pantulan sinyal dari suatu objek berdasarkan kekompakan material atau keras lunaknya objek.
Berdasarkan Tabel 3, dapat dilihat bahwa nilai impedansi akustik dari pipa lebih tinggi dibandingkan dengan substrat lumpur dan lumpur berpasir.
Impedansi akustik ini dihitung berdasarkan nilai densitas ρ dan kecepatan gelombang kompresi c. Masing-masing target memiliki ρ dan c yang berbeda. Seperti lumpur ρ adalah 1420 kg/m3dan c adalah 1519 m/s, lumpur berpasir nilai
ρ dan c adalah 1830 kg/m3dan 1677 m/s (Hamilton, 1971a dalam Clay dan Medwin, 1977), sedangkan pada pipa nilai ρ dan c adalah 8030 kg/m3dan 2580 m/s (AK Steel Corporation, 2007). Setelah diketahui nilai masing-masing densitas dan kecepatan gelombang kompresinya, maka nilai dari masing-masing akustik impedansi Z dapat dihitung, dan hasilnya dapat dilihat pada Tabel 3. Jadi dapat dikatakan nilai akustik impedansi ini bergantung pada kecepatan gelombang kompresi.
Semakin tinggi nilai kecepatan gelombang kompresi maka, nilai Z akan semakin tinggi pula. Apabila kecepatan yang dimiliki oleh target semakin tinggi,
maka nilai sinyal pantulan yang dikembalikan oleh target ke receiver juga tinggi dan ini juga bergantung pada kekerasan dan kekasaran dari objek yang terdeteksi. Tabel 3. Hasil Perhitungan Akustik Impedansi dan Koefisien Refleksi
Target Akustik Impedansi Koefisien Refleksi Koefisien Refleksi Backscattering Strength (dB) (dB) Lumpur 2.1569 x 106 0.1896 -7.4557 -6.5913 Lumpur Berpasir 3.0689 x 106 0.3433 -4.6421 -4.0129 Pipa 2.0717 x 107 0.8649 -0.6299 0
Sumber: Hasil Pengolahan Lampiran 4
Hasil dari perhitungan impedansi akustik Z ini, dapat dihitung pula nilai koefisien refleksi. Nilai koefisien refleksi atau yang lebih dikenal dengan R dihitung berdasarkan nilai perbandingan antara medium 1 dan medium 2, dalam hal ini yang dimaksud dengan medium 1 adalah air dan medium 2 adalah target yang dicurigai. Sebelum dilakukan proses perhitungan nilai koefisien refleksi, perlu diketahui nilai densitas ρ dan kecepatan gelombang kompresi c yang terdapat pada air, dalam hal ini adalah air laut. Nilai densitas dan kecepatan gelombang kompresi yang dipakai adalah 1000 kg/m3dan 1500 m/s (Clay dan Medwin, 1977). Setelah diketahui nilai dari masing-masing variabel maka nilai impedansi akustik dari air itu sendiri adalah 1.5 x 106Kg/m2s. Kemudian, dilakukan proses perhitungan nilai koefisien refleksi. Dari hasil perhitungan didapat bahwa nilai koefisien refleksi berkisar antara 0 dan 1. Jika nilai koefisien refleksi yang didapat diubah kedalam decibel (dB), maka didapat nilai koefisien
refleksinya sebesar -7.4557 dB, -4.6421 dB, dan -0.6299 dB. Semakin tinggi nilai koefisien refleksi maka akan semakin tinggi nilai pantulan sinyal dari objek yang terdeteksi. Akan tetapi jika nilai koefisien refleksi lebih dari 1, maka akan terjadi penguatan, hal ini dikarenakan jarak antara objek dan alat yang digunakan terlalu dekat, sehingga pengembalian sinyal yang dipantulkan juga semakin besar dan pengambilan datanya dilakukan di daerah yang dangkal. Jika hal ini terjadi, maka akan dilakukan proses perhitungan selanjutnya terhadap kedalaman suatu perairan dari daerah yang diteliti.
Setelah dilakukan perhitungan akustik impedansi dan koefisien refleksi, maka dapat dengan mudah dilakukan pengolahan backscattering strength (SS). Pipa yang merupakan pemantul sempurna dijadikan sebagai referensi dalam perhitungan SS lumpur dan lumpur berpasir. Dari hasil pengolahan didapat nilai
backscattering strength lumpur adalah -6.5913 dB dan lumpur berpasir -4.0129
dB. Pada Tabel 3 dilhat nilai backscattering strength dari pipa adalah nol. Ini dikarenakan pipa sebagai pemnatul sempurna. Apabila dilakukan perhitungannya dimana pipa dijadikan referensi, maka hasilnya adalah 1. Setelah itu, nilai satu tersebut kita ubah kedalam bentuk logaritma untuk mendapatkan hasil
backscattering strength. Logaritma dari satu adalah nol. Suatu bentuk perkalian
jika dikalikan dengan nol maka hasilnya tetap nol, karena itu nilai backscaterring
strength pipa adalah nol.
4.5 Dimensi Target Terdeteksi
Pada Tabel 4 dapat dilihat hasil perhitungan dimensi dari target yang terdeteksi. Perhitungan dimensi ini dilakukan berdasarkan objek yang terekam.
Dari hasil rekaman dapat dilihat banyak sekali gambaran objek yang terdeteksi, hanya saja penulis tidak menghitung semua dimensi yang terekam, ini
dikarenakan hasil gambar dari rekaman side scan sonar tersebut, ada yang
merupakan hasil distorsi akibat propeller kapal, dan menyebabkan hasil gambaran yang didapat tidak terekam dengan baik.
Perhitungan yang dilakukan secara manual menggunakan teorema
phytagoras. Dari hasil perhitungan ini, maka didapatlah nilai dari panjang dan
lebar dari objek yang terdeteksi (Tabel 4). Ada dari beberapa objek yang
terdeteksi memiliki bayangan, jika bayangan dari objek yang terdeteksi diketahui, maka dapat dihitung tinggi dari objek tersebut. Semakin lebar/besar bayangan dari objek yang terdeteksi, maka dapat dikatakan bahwa objek yang teredeteksi ini memiliki tinggi yang relatif besar. Perhitungan dimensi ini biasanya ditujukan untuk berbahaya atau tidaknya bagi jalur pelayaran dan juga untuk mengetahui posisi fiks dari suatu objek.
Tabel 4 merupakan hasil dari perhitungan dimensi target yang terdeteksi, dimana perhitungan ini dilakukan secara manual. Perhitungan ini dimaksudkan untuk mengetahui dimensi dari target yang terdeteksi.
Tabel 4. Hasil Perhitungan Dimensi Target Terdeteksi
Jalur Jarak fix Di lapangan (m) Jarak Fix di kertas (cm) Tinggi towfish (m) Slant range (m) Slant range bayangan (m) Panjang Objek di kertas (cm) Lebar objek di kertas (cm) Panjang Bayangan (m) Jarak mendatar objek (m) Ukuran Dimensi Panjang (m) Lebar (m) Tinggi (m) Kolam 1 25 1.5 7.5 10.6 - 0.8 0.6 - 7.4907 13.3333 10 -25 1.5 7.4 10.3 - 0.5 0.4 - 7.1645 8.3333 6.6667 -25 1.5 7.4 10.3 - 1 0.4 - 7.1645 16.6667 6.6667 -25 1.5 7.5 8.4 - 1.1 0.3 - 3.7829 18.3333 5 -25 1.5 6.6 7.8 - 1.3 0.2 - 4.1569 21.6667 3.3333 -Kolam 8 25 1.5 8 43.1 - 1.3 0.3 - 42.3510 21.6667 5 -25 1.5 7.6 13.1 - 5.8 0.5 - 10.6701 96.6667 8.3333 -25 1.5 8.4 13.4 38.1 3.25 0.5 5.6 10.4403 54.16667 8.3333 1.2347
5. KESIMPULAN DAN SARAN
5.1 Kesimpulan
Hasil dari pengambilan substrat dasar, diketahui bahwa jenis substrat yang terdapat di area survei adalah lumpur dan lumpur berpasir. Nilai pantulan pipa dan objek keras berkisar antara 1-2.5 Voltage/div, nilai pantul substrat lumpur berpasir berkisar antara 0.5-1 Voltage/div, dan nilai pantulan sinyal pada substrat lumpur adalah 0.0-0.5 Voltage/div.
Dari hasil analisis Fast Fourier Transform (FFT), nilai pipa lebih tinggi dibandingkan dengan objek lainnya, yaitu sebesar 1412 Volt/dB. Sedangkan pada
unknown objek, lumpur dan lumpur berpasir adalah 834.0728 Volt/dB, 106,2367
Volt/dB, dan 238.9427 Volt/dB. Nilai koefisien refleksi yang terhitung menyatakan bahwa nilai koefisien refleksi pipa sebesar 0.8649 lebih besar dibandingkan dengan target yang terdeteksi lainnya.
Hasil perhitungan backscattering strength (SS) dari lumpur adalah sebesar -6.5913 dB dan untuk lumpur berpasir sebesar -4.0129 dB.
5.2 Saran
Penulis menyarankan agar pengolahan data sinyal dari instrumen side scan
DAFTAR PUSTAKA
AK Steel Corporation. 2007. Data sheet steel stainless steel. West Chester.
http://www.aksteel.com(2 November 2009).
Clay, C. S. dan H. Medwin. 1977. Acoustical Oceanography: Principles and Applications. John Wiley & Sons. New York.
Edi, B.P. 2009. Aplikasi Instrumen Akustik Multibeam dan Side Scan Sonar Di Perairan Sekitar Teluk Mandar dan Selat Makasar. Skripsi (tidak
dipublikasikan). Departemen Ilmu dan Teknologi Kelautan, Fakultas Perikanan dan Ilmu Kelautan, Institut Pertanian Bogor. Bogor
Fish, P. J. dan H. A. Carr. 1990. Sound Under Water Images. American Underwater Search and Survey. Ltd. Orleans.
Friedman, R. L. 1978. Principles of Sedimentology. Mc Graw Hill Book Company. New York.
Gross, G. M. 1993. Oceanography. A view of The Earth. Prentice Hall Inc. New Jersey.
Hutabarat, S dan M. E. Stewart. 2000. Pengantar Oseanografi. UI Press. Jakarta. Klein Associates, Inc. 1985. Side Scan Sonar Record Interpretation. New
Hampshire. USA.
Laswono, D. 2007. Interpretasi side scan sonar untuk perencanaan peletakan kabel laut di perairan Kepulauan Seribu. Skripsi (tidak dipublikasikan). Komando Pendidikan Angkatan Laut, Sekolah Tinggi Angkatan Laut. Jakarta.
Lie, B. K. 2007. Pemetaan Struktur Dasar Laut dengan Menggunakan Sub Bottom Profiller dan Side scan Sonar. Skripsi (tidak dipublikasikan). Departemen Ilmu dan Teknologi Kelautan, Fakultas Perikanan dan Ilmu Kelautan, Institut Pertanian Bogor. Bogor.
Mahyuddin, M. F. 2008. Penggunaan Perangkat Lunak Sonar Pro Untuk Pengolahan Data Side Scan Sonar. Tugas Akhir. Bandung. Institut Teknologi Bandung. Program Studi Teknik Geodesi dan Geomatika. Russel, I. 2001. Basic Principles Of Hydrographic Surveying. Hydrographic
Awarness. Seminar and Course: The Importance of Hydrographic Survey for Management and Development of The Coastal Zone; Jakarta, 24-27 April 2001.