KOMPUTASI DATA
SIDE SCAN SONAR
KLEIN 3000
UNTUK IDENTIFIKASI TARGET DASAR LAUT
HENDRA GUSTIAWAN
SKRIPSI
DEPARTEMEN ILMU DAN TEKNOLOGI KELAUTAN
FAKULTAS PERIKANAN DAN ILMU KELAUTAN
Dengan ini saya menyatakan bahwa skripsi yang berjudul
KOMPUTASI DATA SIDE SCAN SONAR KLEIN 3000 UNTUK IDENTIFIKASI TARGET DASAR LAUT
adalah benar merupakan hasil karya sendiri dan belum diajukan dalam bentuk apapun kepada perguruan tinggi manapun. Semua sumber data dan informasi yang berasal atau dikutip dari karya yang diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka dibagian akhir Skripsi ini.
Bogor, September 2012
SUMMARY
HENDRA GUSTIAWAN. Computation Data of Side Scan Sonar Klein 3000 for Identification of Seabed Target. Supervised by HENRY M. MANIK.
Side scan sonar provides information on the topography of the seabed which is needed in a variety of marine applications such as secure channels for shipping, marine industry, pipeline survey and submarine cables, detection of mines, detection of fishing ground of demersal fish, the search for sunken ships, etc. This research can provide quantitative information in the form of the backscatter value in decibels of the object or target which is detected. The purpose of this study was to analyze the data side scan sonar in quantitative and qualitative as well as clarify the results of image processing of side scan sonar using continuous wavelet transform.
The location of survey was located in the Sunda Strait on the coordinates 5° 40' 00" S - 6° 00' 00" S and 105° 40' 00" E - 106° 10' 00" E. Data processing was done at the Marine Acoustics Laboratory, Department of Marine Science and Technology, Bogor Agricultural University and the Center for Research and Development of Marine Geology (PPPGL) in Bandung. Interpretation and classification of side scan sonar acoustic data conducted qualitatively by using software SonarPro to know the dimensions or size of the target. Quantitatively, the processing data was using software SonarWiz.MAP, SonarWeb, xtfToSegy, SeisSee and Matlab with the wavelet method.
Sunda Strait categorized as shallow waters where the depth is less than 200 meters. There are a variety of different water depths for each of the latitude and longitude. There are a variety of different water depths for each latitude and longitude position. The areas along 105.77 E – 105.83 E and -5.89 S – -5.93 S shows the value of the maximum depth is 40 meters. The regional distribution of sediments in the Sunda Strait tends to be dominated by the gravely sand. Closer to the coastal area, the type of sediment is muddy sand combined with little gravel on larger particle size.
HENDRA GUSTIAWAN. Komputasi Data Side Scan Sonar Klein 3000 untuk Identifikasi Target Dasar Laut. Dibimbing oleh HENRY M. MANIK.
Side scan sonar memberikan informasi mengenai topografi dasar laut yang
sangat diperlukan dalam berbagai aplikasi kelautan seperti jalur aman bagi pelayaran, industri kelautan, survei rute pipa dan kabel bawah laut, deteksi bahan tambang, pencarian daerah tangkapan khususnya ikan demersal, pencarian kapal karam, dan sebagainya. Penelitian ini dapat memberikan informasi kuantitatif berupa nilai backscatter dalam desibeldari objek atau target yang terdeteksi. Tujuan dari penelitian ini adalah menganalisis data side scan sonar secara kuantitatif dan kualitatif serta memperjelas hasil image processing dari side scan
sonar menggunakan transformasi wavelet kontinu.
Lokasi survei berada di Perairan Selat Sunda pada koordinat 5° 40' 00" LS - 6° 00' 00" LS dan 105° 40' 00" BT - 106° 10' 00" BT. Pengolahan data
dilakukan di Laboratorium Akustik Kelautan, Departemen Ilmu dan Teknologi Kelautan, Institut Pertanian Bogor dan di Pusat Penelitian dan Pengembangan Geologi Laut (PPPGL) di Bandung. Interpretasi dan klasifikasi data akustik side
scan sonar dilakukan secara kualitatif dengan menggunakan software SonarPro
untuk mengetahui dimensi atau ukuran dari target. Pemrosesan data secara kuantitatif menggunakan softwaresonarWiz.MAP, SonarWeb, xtfToSegy, seisSee
dan Matlab dengan metode wavelet.
Perairan Selat Sunda termasuk dalam kategori perairan dangkal dimana kedalaman perairannya kurang dari 200 meter. Terdapat adanya variasi kedalaman perairan yang berbeda untuk setiap posisi lintang dan bujur. Pada koordinat
105,77 BT – 105,83 BT dan -5,89 LS – -5,93 LS menunjukkan nilai kedalaman maksimum yaitu mencapai 40 meter. Distribusi sebaran regional sedimen pada area pengambilan data side scan sonar didominasi oleh tipe sedimen pasir sedikit kerikilan. Semakin mendekati daratan tipe sedimennya berupa pasir lumpuran sedikit kerikilan yang ukuran partikelnya lebih besar.
Berdasarkan hasil interpretasi data side scan sonar secara kualitatif terdapat 5 objek yang terdiri atas Target 001, Target 004, Target 009, Target 010, dan Target 014. Masing-masing target mempunyai ukuran yang berbeda-beda. Target 001 merupakan target terbesar yang terdeteksi dengan ukuran 62,8 x 14,5 x 2,6 meter sedangkan Target 010 merupakan target terkecil dengan dimensi 12,6 x 1,8 x 0,1 meter. Target 009 merupakan target dengan nilai maximum range
terkecil dimana berukuran 76,6 meter dan 82,2 meter sedangkan Target 010 merupakan target dengan nilai maximum range terbesar dimana berukuran 96,9 meter dan 97,5 meter. Berdasarkan hasil pengolahan data side scan sonar secara kuantitatif yang ditransformasikan menggunakan wavelet kontinu diketahui bahwa pada Target 010 nilai backscatter tertinggi berada di selang waktu 9,4 detik dengan nilai sebesar -4 dB sedangkan nilai backscatter terkecil berada pada Target 004 dengan selang waktu 5 detik dan nilai backscatter sebesar -46 dB. Target 010 merupakan target dengan dimensi terkecil namun memiliki nilai
backscatter terbesar yang diduga merupakan benda padat yang partikel
© Hak cipta milik Hendra Gustiawan, tahun 2012
Hak cipta dilindungi
UNTUK IDENTIFIKASI TARGET DASAR LAUT
HENDRA GUSTIAWAN
SKRIPSI
Sebagai salah satu syarat untuk memperoleh gelar Sarjana Ilmu Kelautan Pada Fakultas Perikanan dan Ilmu Kelautan
Institut Pertanian Bogor
DEPARTEMEN ILMU DAN TEKNOLOGI KELAUTAN
FAKULTAS PERIKANAN DAN ILMU KELAUTAN
SKRIPSI
Judul Skripsi : KOMPUTASI DATA SIDE SCAN SONAR KLEIN 3000 UNTUK IDENTIFIKASI TARGET DASAR LAUT Nama Mahasiswa : Hendra Gustiawan
Nomor Pokok : C54080020
Departemen : Ilmu dan Teknologi Kelautan
Menyetujui,
Dosen Pembimbing
Dr.Ir. Henry M. Manik, M.T NIP. 19701229 199703 1 008
Mengetahui,
Ketua Departemen,
Prof. Dr. Ir. Setyo Budi Susilo M.Sc NIP. 19580909 198303 1 003
Penulis dilahirkan di Pangkalpinang pada tanggal 3 Agustus 1990 dari ayah yang bernama Then Djin Thoe dan ibu Tham Siu Co. Penulis merupakan anak keempat dari empat bersaudara.
Lulus dari Sekolah Menengah Atas Negeri 2 Pangkalpinang, Bangka Belitung pada tahun 2008, penulis diterima sebagai mahasiswa Institut Pertanian Bogor, Fakultas Perikanan dan Ilmu Kelautan, Departemen Ilmu dan Teknologi Kelautan, Program studi Ilmu dan Teknologi Kelautan melalui jalur Undangan Seleksi Masuk IPB (USMI).
Selama kuliah di Institut Pertanian Bogor penulis pernah menjadi asisten mata kuliah Oseanografi Kimia periode 2011-2012. Penulis juga pernah
mengikuti Program Kreatifitas Mahasiswa yang didanai oleh DIKTI tahun 2012. Penulis aktif dalam organisasi Himpunan Mahasiswa Ilmu dan Teknologi
Kelautan (HIMITEKA) sebagai anggota di Divisi Keilmuan bagian Akustik dan Instrumentasi Kelautan periode 2011-2012. Penulis juga aktif dalam organisasi Keluarga Mahasiswa Buddhis (KMB) IPB sebagai koordinator Olahraga dan Kesenian periode 2009-2010. Penulis juga pernah menjadi juara 1 Basket Putra PORIKAN sekaligus Most Valuable Player (MVP) pada tahun 2010-2011.
Dalam rangka penyelesaian studi di Fakultas Perikanan dan Ilmu
Kelautan, penulis melaksanakan penelitian dengan judul “Komputasi Data Side
KATA PENGANTAR
Puji dan syukur penulis panjatkan kehadiran Tuhan Yang Maha Esa, karena atas rahmat dan karunia-Nya penulis dapat menyelesaikan penelitian ini. Penelitian yang berjudul ”KOMPUTASI DATA SIDE SCAN SONAR KLEIN 3000 UNTUK IDENTIFIKASI TARGET DASAR LAUT” diajukan sebagai salah satu syarat untuk mendapatkan gelar Sarjana Ilmu Kelautan pada Fakultas Perikanan dan Ilmu Kelautan.
Dalam kesempatan ini penulis ingin mengucapkan terima kasih yang sebesar-besarnya kepada :
1. Papa, Mama, Cece, dan seluruh keluarga besar yang telah memberikan dukungan, doa, motivasi serta arahannya kepada penulis.
2. Bapak Dr. Ir. Henry M. Manik, M.T selaku dosen pembimbing yang telah banyak membantu dan membimbing penulis dalam proses penyelesaian tugas akhir.
3. Bapak Subarsyah, Bapak Kris, Bapak Undang beserta semua staf PPPGL yang tidak dapat disebutkan satu persatu dan banyak pihak yang
mendukung dalam pencapaian skripsi ini.
4. Bapak Prof. Dr.Ir. Indra Jaya, M.Sc selaku dosen penguji dan Dr. Ir. Sri Pujiyati, M.Si selaku dosen penguji komisi pendidikan ITK.
5. Adriani Sunnudin, S.Pi, M.Si. selaku Pembimbing Akademik selama penulis menuntut ilmu di Departemen Ilmu dan Teknologi Kelautan (ITK)
– Institut Pertanian Bogor (IPB).
6. Bapak/Ibu dosen dan staf penunjang Departemen ITK atas bantuannya selama penulis menyelesaikan studi di IPB.
7. Pusat Penelitian dan Pengembangan Geologi Kelautan (PPPGL) yang telah mendukung pelaksanaan penelitian ini
9. Rini, Wahyu, Sahat, Dwito, Prima, Edo, Salimah dan semua teman-teman kostan Perwira 77 atas semangat dan motivasinya sebagai seorang sahabat dalam suka dan duka.
10.Marsya, Kadek, Mahendra, Resti, Fahmi dan teman-teman seperjuanganku ITK 45 cingcong yang tidak dapat disebutkan satu persatu dan banyak pihak yang mendukung dalam pencapaian skripsi ini.
Penulis menyadari skripsi ini jauh dari sempurna, oleh karena itu saran dan kritik sangat diharapkan demi kesempurnaan skripsi ini. Akhir kata penulis
berharap agar skripsi ini dapat berguna bagi diri sendiri maupun orang lain dan dapat dikembangkan untuk penelitian selanjutnya.
Bogor, September 2012
Hendra Gustiawan
DAFTAR ISI
2. TINJAUAN PUSTAKA 2.1. Side Scan Sonar ... 3
2.7. Koefisien Refleksi dan Impedansi Akustik... ... 12
2.7. Geologi Selat Sunda... ... 13
3. METODE PENELITIAN 3.1. Waktu dan Lokasi Penelitian ... 15 4. HASIL DAN PEMBAHASAN 4.1. Batimetri Selat Sunda ... 23
4.2. Sebaran Sedimen Permukaan Dasar Laut ... 25
4.3. Hasil Side Scan Sonar secara Kualitatif ... 28
4.3.1. Mosaik Side Scan Sonar ... 28
4.3.2. Image Target Side Scan Sonar ... 30
4.4. Hasil Side Scan Sonar secara Kuantitatif ... 33
5. KESIMPULAN DAN SARAN 5.1. Kesimpulan ... 38
5.2. Saran ... 39
DAFTAR PUSTAKA ... 40
Halaman 1. Ukuran Besar Butir Sedimen menurut Skala Wentworth ... 7 2. Spesifikasi Side scan sonar Klein 3000 ... 16
DAFTAR GAMBAR
Halaman
1. Aplikasi Pemanfaatan Side Scan Sonar dalam Penentuan Jenis Sedimen .. 3
2. Side Scan Sonar (Klein system 3000)... 4
3. Blok Diagram Prinsip Kerja Side Scan Sonar ... 5
4. Diagram Sand, Silt and Clay ... 8
5. Amplitudo dan Fase Spektrum ... 11
6. Peta Lokasi Penelitian... ... 15
7. Diagram Alir Pemrosesan Data Side Scan Sonar ... ... 18
8. Diagram Alir Proses Pengolahan Batimetri dengan SRTM 30 Plus ... 19
9. Peta Batimetri 2 Dimensi Perairan Selat Sunda ... 24
10.Peta Sebaran Sedimen Permukaan Dasar Laut ... 26
11.Sebaran Regional Sedimen Permukaan Dasar laut ... 27
12.Mosaik Data Side Scan Sonardi Selat Sunda ……… 29
13.Hasil Interpretasi Kualitatif Target Side Scan Sonar ... 32
14.Hubungan Nilai Backscatter terhadap Waktu Tiap Target ... 34
15.Transformasi Wavelet Kontinu Tiap Target ... 37
1. Gambar dan spesifikasi Gravity Core dan Grab Sampler ... 44
2. Data Sampel Nilai Waktu dan Backscatter Target 001 ... 45
3. Syntax Tranformasi Wavelet Kontinu pada Target ... 49
4. Data Batimetri SRTM 30 Plus di Perairan Selat Sunda ... 50
5. Tabel data Sedimen Permukaan Dasar Laut Perairan Selat Sunda ... 51
6. Tabel Parameter dan Rumus pada Pemrosesan Nilai Backscatter (dB) 57
7. Data Sampel Konversi Nilai Amplitudo menjadi Backscatter (dB) Target 001 ……… 58
8. Contoh Objek Hasil Pemindaian Side Scan Sonar Klein 3000 (Target 001) ………..……… 63
1
1. PENDAHULUAN
1.1 Latar Belakang
Pemetaan dasar laut menjadi sangat penting karena informasi mengenai topografi dasar laut sangat diperlukan dalam berbagai aplikasi kelautan seperti jalur aman bagi pelayaran, industri kelautan, survei rute pipa dan kabel bawah laut, deteksi bahan tambang, pencarian daerah tangkapan khususnya ikan demersal, pencarian kapal karam, dan sebagainya. Salah satu cara untuk
mengetahui informasi dari berbagai aspek dasar laut yaitu dengan menggunakan sistem akustik bawah air seperti side scan sonar.
Side scan sonar merupakan suatu sistem sonar yang dapat memancarkan
beam secara horizontal pada kedua bagian sisinya dengan frekuensi tertentu
(Medwin dan Clay, 1998). Side scan sonar mampu membedakan besar kecil partikel penyusun permukaan dasar laut, seperti batuan, lumpur, pasir, kerikil, atau tipe-tipe dasar perairan lainnya (Bartholoma, 2006). Instrumen ini mampu menangkap gelombang pasir atau riak-riak kecil yang tingginya beberapa sentimeter serta mampu memberikan informasi dengan rinci tentang kondisi topografi dasar.
Penelitian dengan menggunakan side scan sonar telah banyak dilakukan, seperti deteksi dan interpretasi di dasar laut menggunakan instrumen side scan
sonar (Sari dan Manik, 2009), penelitian mengenai pemetaan dan klasifikasi
15 3.1. Waktu dan Lokasi Penelitian
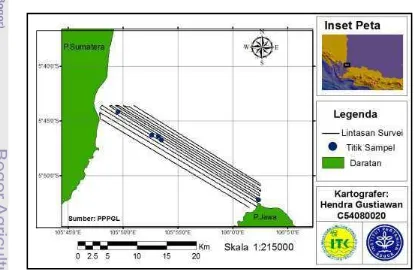
Penelitian ini menggunakan data side scan sonar yang berasal dari survei lapang untuk kegiatan pemasangan kabel PLN yang telah dilakukan oleh Pusat Penelitian dan Pengembangan Geologi Laut (PPPGL) pada bulan Mei tahun 2008. Lokasi penelitian berada di perairan Selat Sunda pada koordinat 5° 40' 00" LS - 6° 00' 00" LS dan 105° 40' 00" BT - 106° 10' 00" BT. Peta lokasi penelitian dapat dilihat pada Gambar 6. Pengolahan data dilakukan di Laboratorium Akustik Kelautan Fakultas Perikanan dan Ilmu Kelautan, Departemen Ilmu dan Teknologi Kelautan, Institut Pertanian Bogor dan di Pusat Penelitian dan Pengembangan Geologi Laut (PPPGL) Bandung mulai Febuari 2012 hingga Juni 2012.
16
3.2. Pengambilan Data Side Scan Sonar
Pengambilan data side scan sonar menggunakan Klein System 3000 sebanyak 11 lintasan dengan menggunakan metode survei pararel transek. Spesifikasi alat yang digunakan ditunjukkan pada Tabel 2. Alat ini dioperasikan dengan menggunakan seperangkat komputer untuk merekam data secara real time, dan Global Positioning
System (GPS) yang terpasang di kapal untuk mengetahui posisi lintang (latitude) dan
bujur (longitude). Side scan sonar mempunyai frekuensi ganda yaitu 100 kHz (50 µs) dan 500 kHz (25 µs), dengan software akusisi yang digunakan adalah sonarPro.
Tabel 2. Spesifikasi Side scan sonar Klein 3000
Spesifikasi Keterangan
Frequencies 100 kHz dan 500 kHz Range Scales 15 settings - 25 to 1,000 meters
Maximum Range 600 meters @ 100 kHz; 150 meters @ 500 kHz
Depth Rating 1.500 meters
Construction Stainless Steel
Size 122 cm long, 8,9 cm diameter
Weight 29 kg in air
Standard Sensors Roll, pitch, heading
Beam Width 0,7 deg. @100 kHz, 0,21 deg. @ 500 kHz Beam Tilt 5, 10, 15, 20, 25 deg
Power Supply 120 watt @120/240 VAC, 50/60 Hz Sumber: http://www.l-3klein.com/
Proses pengambilan data side scan sonar dilakukan dengan menggunakan
towfish atau tow vehicle yang ditarik di belakang kapal menggunakan tow cable.
setelah mengenai objek di dasar laut. Energi yang dipantulkan kembali ini dikenal sebagai backscatter akustik. Backscatter akustik direkam dalam jangka waktu tertentu pada setiap ping, sehingga dapat dibentuk sebuah time series (urutan) dari amplitudo yang diterima. Pembuatan mosaik data side scan dilakukan dengan menggabungkan semua data di sepanjang track kapal yang dilalui oleh side scan sonar.
3.3. Pemrosesan Data
3.3.1. Pemrosesan Data Side Scan Sonar
Pemrosesan data mentah Side Scan Sonar dimulai dari penggunaan software
SonarPro untuk menentukan target beserta dimensinya dan mengetahui posisi atau koordinat dari target tersebut. Selain itu dapat diketahui pula berbagai informasi seperti kedalaman, kecepatan kapal, dan waktu pengambilan data, serta towfish
altitude. Setelah menentukan target dan nomor ping pada SonarPro, tahapan
selanjutnya yaitu melakukan ekstrak raw data side scan sonar pada beberapa
software seperti SonarWeb, Xtf2segy, SeiSee, dan Microsoft Excel.
SonarWeb digunakan untuk mengubah file yang berekstensi *sdf menjadi
*xtf. Selanjutnya digunakan software Xtf2segy untuk mengubah file menjadi *segy. Berikutnya buka data menggunakan SeiSee, simpan data dalam ekstensi trace sample
text file. Selanjutnya data diolah menggunakan Microsoft Excel untukmenganalisis
18
rumit dan berfluktuatif. Selanjutnya data diolah menggunakan metode continous
wavelet transform pada program Matlab untuk mendapatkan karakter sinyal yang
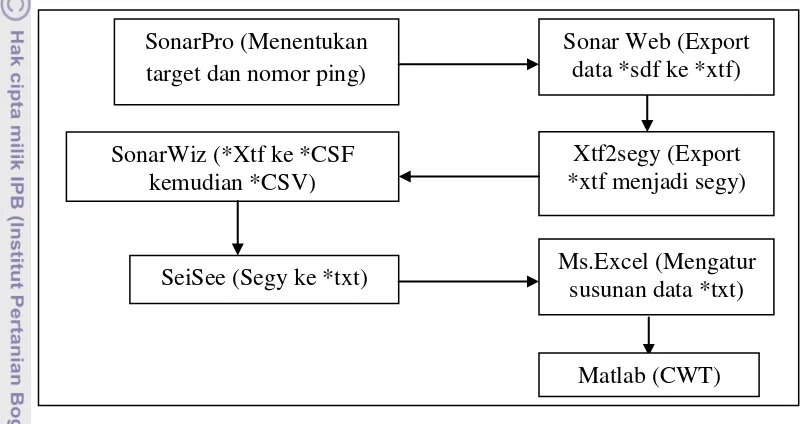
khas dari objek dasar laut di perairan Selat Sunda. Diagram alir pemrosesan data ini ditunjukkan pada Gambar 7.
Gambar 7. Diagram Alir Pemrosesan Data Side Scan Sonar
3.3.2. Pemrosesan Data Pemetaan Dasar Perairan
Proses pengolahan mosaik data side scan sonar dilakukan pada perangkat lunak SonarWeb. Mosaik merupakan penyatuan area yang berdekatan yang mempunyai tingkat overlapping yangdihasilkan dari lintasan survei yang dilalui kapal pada saat melakukan seabed mapping. Hasil keluaran mosaik data side scan
sonar ini dalam format geotiff. Selanjutnya mosaik ini akan diolah menggunakan
perangkat lunak ArcGis untuk mengintegrasikan data mosaik tersebut dengan koordinat target atau objek yang telah ditentukan sebelumnya menggunakan perangkat lunak SonarPro.
Matlab (CWT) Ms.Excel (Mengatur
susunan data *txt) SeiSee (Segy ke *txt)
SonarWiz (*Xtf ke *CSF kemudian *CSV)
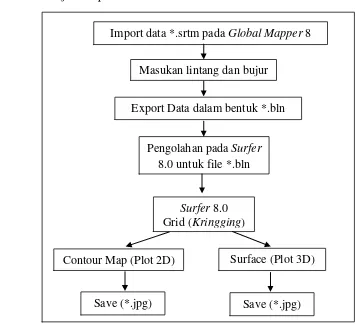
3.3.3. Pemrosesan Data Batimetri
Pemrosesan data ini dimulai dengan memasukan peta SRTM 30 Plus pada
Global Mapper 8.01 kemudian pilih export data menggunakan Export Vector Data
(Export Surfer BLN) dalam bentuk *bln pada menu File agar dapat diolah pada Surfer
8.0. Masukkan koordinat lokasi perairan Selat Sunda. Langkah selanjutnya buka perangkat lunak Surfer 8.0. Lakukan grid data untuk melihat ada tidaknya data yang bermasalah atau error. Selanjutnya klik menu Map kemudian pilih new contour map
untuk menampilkan peta batimetri secara 2 dimensi dan pilih 3D Surface untuk menampilkan peta batimetri secara 3 dimensi.Diagram alir dari pemrosesan data batimetri ini ditunjukkan pada Gambar 8.
Gambar 8. Diagram Alir Proses Pengolahan Batimetri dengan SRTM 30 Plus Import data *.srtm pada Global Mapper 8
Masukan lintang dan bujur
Export Data dalam bentuk *.bln
Pengolahan pada Surfer
8.0 untuk file *.bln
Contour Map (Plot 2D)
Surfer 8.0 Grid (Kringging)
Surface (Plot 3D)
20
3.4. Analisis Data
3.4.1. Analisis Sinyal Akustik
Nilai amplitudo yang diperoleh dari Seisee kemudian diolah dengan beberapa perhitungan akustik sehingga diperoleh nilai echo level dan backscatter.
EL = 20 log [ ] ...(3)
Sistem side scan sonar memindai dasar laut dengan cara horizontal
menyamping sehingga ada parameter dan metode tertentu yang membedakan side
scan sonar dengan intrumen akustik lainnya, seperti parameter range R (slant range)
dan depth H. Range dalam side scan sonar merupakan jarak antara towfish terhadap
objek pindai yang berupa garis miring, sedangkan kedalaman yang terekam oleh side scan sonar adalah altitude atau jarak vertikal antara towfish dan objek pindai,
sehingga nilai backscatter dapat dihitung dengan rumus berikut (Lurton, 2002) :
EL = SL– 30 log R - 2αR + 10 log [ ] + BSB ...(4)
Keterangan :
EL = Echo Level (dB) R = Slant Range (m)
SL = Source Level (dB) α = Koefisien Absorpsi
3.4.2. Analisis Wavelet Transform
Analisis data side scan sonar mengunakan wavelet transform (Simonsen et al, 1998 dalam Simons et al., 2005) :
a : Parameter skala yang mengendalikan fungsi wavelet b : Parameter penentuan pergeseran dari wavelet
C ψ : Normalisasi nilai konstan yang ditentukan oleh transformasidari wavelet
Klasifikasi dari gambar side scan sonar merupakan dasar dalam mengamati tekstur dasar perairan. Karakteristik gambar dapat diketahui dengan perhitungan statistik dengan menggunakan wavelet.
Seperti persamaan dua dimensi wavelet transform (Mavroidis et al., 2008):
22
3.5. Pengambilan Sampel Sedimen
Pengambilan sampel sedimen permukaan dasar laut dilakukan untuk
mengetahui keseragaman dari tekstur ukuran butirnya. Penggunaan gravity core dan
grab sampler untuk pengambilan contoh sedimen permukaan di perairan Selat Sunda
bergantung pada kondisi sedimen di wilayah perairan. Penggunaan kedua peralatan dalam pengambilan sampel dilakukan untuk mendapatkan hasil sampel sedimen yang maksimal. Gambar dan spesifikasi alat dari gravity core dan grab sampler yang digunakan dapat dilihat pada Lampiran 1. Setelah mendapatkan sampel sedimen selanjutnya sampel tersebut di analisa menggunakan metode ayakan bertingkat untuk mengetahui ukuran butiran pada sedimen.
Semua penelitian tersebut menggunakan instrumen side scan sonar yang pengolahan datanya dilakukan secara kualitatif ataupun kuantitatif untuk
menginterpretasikan hasilnya. Pada penelitian ini digunakan pengolahan data secara kuantitatif menggunakan transformasi wavelet kontinu untuk memperjelas hasil image processing dari side scan sonar.
1.2 Tujuan
Penelitian ini bertujuan interpretasi target dasar laut dengan melakukan: 1. Komputasi pada citra side scan sonar.
3
2.
TINJAUAN PUSTAKA
2.1. Side Scan Sonar
Side Scan Sonar merupakan peralatan observasi dasar laut yang dapat
memancarkan beam pada kedua sisi bagiannya secara horizontal. Side scan sonar
memancarkan pulsa suara pada kisaran frekuensi 100-500 kHz. Semakin besar nilai frekuensi maka resolusi data yang dihasilkan akan semakin tinggi akan tetapi area cakupannya semakin sempit (MacLennan dan Simmonds, 2005). Pemanfaatan Side
Scan Sonar sangat luas dalam bidang kelautan seperti digunakan dalam kegiatan
pemetaan dasar laut, pencarian kapal yang karam hingga penentuan jenis sedimen dasar laut seperti pada Gambar 1.
.
Sumber: http://gulfofmexico.marinedebris.noaa.gov
Gambar 1. Aplikasi Pemanfaatan Side Scan Sonar dalam Penentuan Jenis Sedimen.
Side scan sonar merupakan sistem dual frekuensi yang memungkinkan dapat
perairan yang relatif dangkal (Lurton, 2002). Frekuensi yang digunakan bervariasi sehingga memungkinkan untuk membatasi panjang array dibawah satu meter dengan jangkauan mencapai kisaran ratusan meter. Sinyal yang dipancarkan memiliki durasi sekitar 0,1 mdtk, sehingga resolusi spasial dapat mencapai 0,1 m (Lurton, 2002). Gambar 2 menunjukkan salah satu jenis side scan sonar yaitu Klein system 3000.
Sumber: http://www.l-3klein.com
Gambar 2. Side Scan Sonar (Klein system 3000)
Secara umum prinsip kerja side scan sonar digambarkan sesuai dengan Gambar 3. Pulsa listrik yang dihasilkan oleh recorder dikirim ke towfish melalui
towcable. Pulsa-pulsa listrik tersebut diubah menjadi energi mekanik. Hasil dari
perubahan tersebut berupa sinyal ultrasonik yang kemudian dipancarkan ke dasar laut. Sinyal-sinyal tersebut dipantulkan kembali oleh dasar laut dan diterima kembali
ke towfish. Interval waktu dari pengembalian sinyal tersebut tergantung dari jarak
antara towfish dengan titik pemantulannya, selain itu besarnya amplitudo dan
frekuensi sinyal ultrasonik juga berbeda sesuai dengan jenis objek yang memantulkan sinyal ultrasonik tersebut. Sinyal ultrasonik yang diterima oleh towfish diubah
5
perekaman. Hasil rekaman yang terdapat pada kertas recorder kemudian diinterpretasikan jenis objek di dasar laut atau keadaan topografi di dasar laut.
Gambar 3. Blok Diagram Prinsip Kerja Side Scan Sonar
2.2. Interpretasi Citra Side Scan Sonar
Terdapat dua tahapan dalam pengolahan citra Side Scan Sonar, yaitu real time
processing dan post processing. Real time processing bertujuan memberikan koreksi
selama pencitraan berlangsung sedangkan post processing bertujuan meningkatkan pemahaman akan suatu objek melalui interpretasi. Interpretasi pada post processing
dapat dilakukan secara kualitatif dan kuantitatif. Interpretasi secara kualitatif dilakukan untuk mendapatkan sifat fisik material dan bentuk objek, baik dengan mengetahui derajat kehitaman (hue saturation), bentuk (shape), dan ukuran (size) dari objek atau target. Berdasarkan bentuk eksternalnya, secara umum target dapat
dibedakan menjadi buatan manusia (man made targets) atau objek alam (natural
targets). Objek buatan manusia biasanya memiliki bentuk yang tidak beraturan (Klein
Associates Inc, 1985).
Tujuan interpretasi secara kuantitatif adalah mendefinisikan hubungan antara posisi kapal, posisi towfish dan posisi objek sehingga diperoleh besaran horizontal dan vertikal. Besaran horizontal meliputi nilai posisi objek ketika lintasan towfish
RECORDER TOWFISH OBJEK/DASAR
sejajar dengan lintasan kapal maupun ketika lintasan dengan towfish berbentuk sudut. Besaran vertikal meliputi tinggi objek dari dasar laut serta kedalaman objek
(Mahyuddin, 2008).
Prinsip penginterpretasian data side scan sonar sama seperti pada penginderaan jarak jauh. Terdapat tiga faktor yang menentukan kesempurnaan interpretasi citra side scan sonar, yaitu tuning recorder (light or dark), towing
operation, dan kelihaian operator. Pengaruh ketiga faktor tersebut sangat besar dalam
penginterpretasian citra side scan sonar.
2.3. Sedimen Dasar Laut
Sedimen didefinisikan sebagai kerak bumi (regolith) yang ditransportasikan melalui proses hidrologi dari suatu tempat ke tempat yang lain, baik secara vertikal maupun secara horizontal. Seluruh permukaan dasar laut ditutupi oleh partikel- partikel sedimen yang diendapkan secara perlahan-lahan dalam jangka waktu berjuta-juta tahun (Garrison, 2005). Klasifikasi dasar sedimen dapat dilakukan dengan
7
Tabel 1. Ukuran Besar Butir Sedimen menurut Skala Wentworth (Wibisono,2005)
Fraksi Sedimen Partikel Ukuran Butir (mm)
Batu Pasir sangat halus 0,063 - 0,125
Lumpur
Lumpur kasar 0,031 - 0,063 Lumpur sedang 0,016 - 0,031 Lumpur halus 0,008 - 0,016 Lumpur sangat halus 0,004 - 0,008
Lempung
Lempung kasar 0,002 - 0,004 Lempung sedang 0,001 - 0,002 Lempung halus 0,0004 - 0,001 Lempung sangat halus 0,0002 - 0,0004
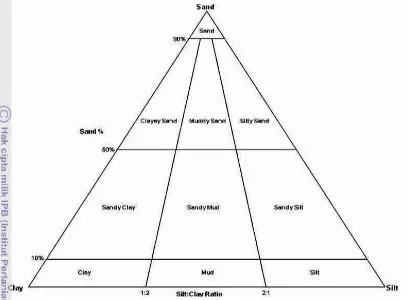
Klasifikasi campuran sedimen dapat dilakukan berdasarkan komposisi partikel di dalam sedimen itu sendiri. Komposisi partikel sedimen dapat dipetakan di dalam diagram yang digambarkan dalam bentuk segitiga (Gambar 4) untuk
Gambar 4. Diagram Sand, Silt and Clay (Blott dan Kenneth, 2001)
2.4. Acoustic Backscattering Strength Dasar Laut
Nilai backscattering yang diberikan oleh dasar perairan biasanya memiliki intensitas tertentu, namun diperlukan threshold agar nilai backscattering dari dasar laut yang ingin diamati dapat terekam dengan baik. Backscattering akustikpada dasar berbatu memberikan nilai yang lebih besar dibandingkan dengan dasar berlumpur (Manik, 2011). Urick (1983) menjelaskan bahwa pada dasarnya tidak terdapat hubungan yang kuat antara frekuensi yang digunakan dengan nilai backscattering
strength yang dihasilkan dari dasar laut dengan tipe batu dan pasir berbatu dan pasir
9
tersebut. Pada kasus sedimen berpasir, nilai backscattering yang didapatkan cenderung meningkat dengan meningkatnya frekuensi (Greenlaw et al., 2004).
Penggunaan frekuensi tinggi memberikan nilai backscattering yang dominan dihasilkan oleh permukaan sedimen dibandingkan backscattering yang diberikan oleh volume sedimen. Pada frekuensi yang lebih rendah nilai backscattering yang
diperoleh dipengaruhi juga oleh backscattering dari volume sedimen (Chakraborty et al., 2007). Manik (2006) menjelaskan bahwa dengan menggunakan nilai SS, nilai
backscattering pasir lebih besar dari pada nilai SS pada substrat lumpur dan nilai SS
meningkat dengan kenaikan diameter partikel dasar laut.
2.5. Transformasi Wavelet
Transformasi Wavelet merupakan transformasi yang terpadu menggunakan kernel terintegrasi yang dinamakan wavelet. Wavelet mampu melakukan analisis lokal dengan window sekecil mungkin terhadap suatu sinyal. Sebuah wavelet
merupakan gelombang singkat (small wave) yang energinya terkonsentrasi pada suatu selang waktu untuk memberikan kemampuan analisis transien, ketidakstasioneran , atau fenomena berubah terhadap waktu (time varying). Karakteristik dari wavelet
antara lain atau berosilasi singkat, translasi (pergeseran), dan dilatasi (skala). Wavelet
ini dapat digunakan dalam dua cara, yaitu sebagai kernel terintegrasi untuk analisis serta mengekstraksi informasi suatu data dan sebagai suatu basis penyajian atau karakterisasi suatu data. Contoh penerapan transformasi wavelet yaitu karakterisasi sinyal akustik dari target dasar laut dilakukan oleh Charnila (2010).
Wavelet merupakan fungsi matematik yang membagi-bagi data menjadi
beberapa komponen frekuensi yang berbeda-beda, kemudian dilakukan analisis untuk masing-masing komponen menggunakan resolusi yang sesuai dengan skalanya (Graps, 1995). Kepentingan penggunaan Transformasi Wavelet ini berdasarkan fakta bahwa dengan Transformasi Wavelet akan diperoleh resolusi waktu dan frekuensi yang jauh lebih baik daripada metode-metode lainnya seperti Transformasi Fourier
maupun Transformasi Fourier Waktu Pendek (STFT=Short Time Fourier
Transform), selain itu analisis data pada kawasan waktu dan frekuensi penting dan
11
2.6. Continous Wavelet Transform (CWT)
Continous wavelet transform (CWT) atau transformasi wavelet kontinu
merupakan salah satu jenis wavelet yang digunakan untuk menganalisis sinyal non stasionari dengan sifat statistiknya berubah sepanjang waktu. Spetrum puncak amplitude dapat ditampilkan berbeda karena masing-masing komponen sinyal
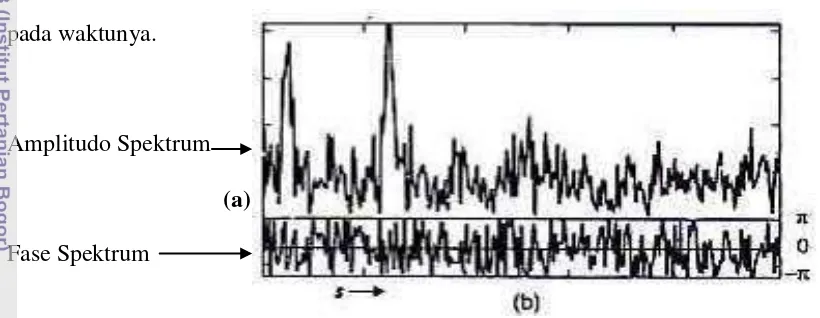
transien dapat dideteksi dan memiliki nilai yang besar dalam amplitudo. Gambar 5 di bawah ini memiliki puncak yang berbeda nyata pada frekuensi dari dua amplitudo yang signifikan. Fase spektrum dapat memberikan informasi ke lokasi komponen pada waktunya.
Amplitudo Spektrum (a) Fase Spektrum
Gambar 5. Amplitudo dan Fase Spektrum (Castleman, 1996).
CWT didefinisikan sebagai jumlah sinyal yang dikalikan dari fungsi wavelet
yang diskala (scaling) dan digeser (shifting) pada keseluruhan waktu. Faktor skala (a) menyimpan informasi tentang frekuensi dan faktor pergeseran (b) menyimpan
informasi mengenai waktu dimana memiliki range dari –π sampai dengan π (Burrus
et al., 1998). CWT menganalisis sinyal secara menyeluruh (kontinyu) menggunakan
sebagai kaitan antara input data dengan urutan satu set fungsi yang dihasilkan oleh
motherwavelet, yang digunakan untuk menguraikan fungsi waktu lanjut menjadi
wavelet.
2.7. Koefisien Refleksi dan Impedansi Akustik
Perhitungan Koefisien Refleksi dilakukan untuk melihat seberapa besar nilai pantulan dari suatu target yang terdeteksi dimana nilainya sangat dipengaruhi oleh akustik impedansi. Akustik impedansi bergantung pada densitas dan kecepatan gelombang kompresi dari masing-masing target. Perhitungan akustik impedansi dan koefisien refleksi menggunakan persamaan 1 dan 2
Z = ρx c ……….….. (1)
... (2) Keterangan:
Z = Akustik Impedansi (kg/m2 dtk) ρ= densitas (kg/m3)
13
2.8. Geologi Selat Sunda
Selat Sunda merupakan daerah peralihan pola tunjaman vulkanik dan morfotektonik yang menghasilkan karakter geologi berbeda. Kedalaman dasar laut yang mencolok, yaitu antara Laut Jawa yang dangkal dengan kedalaman maksimal 50 meter dan Samudera Hindia dengan kedalaman 6.000 meter mencerminkan topografi parit (trench), punggungan (ridge), cekungan (basin) dan laut dangkal. Data
sub-bottom profiling dihasilkan peta sebaran struktur geologi, zona kestabilan dan zona
resiko landslide. Struktur geologi yang berkembang di Selat Sunda memiliki dua arah, yaitu barat laut – tenggara dan timur laut barat daya. Morfologi permukaan dasar laut dipengaruhi oleh struktur geologi dan tektonik yang aktif, terutama terlihat di bagian sebelah timur Pulau Sangiang berupa palung dengan kedalaman berkisar lebih dari 130 meter berarah timur laut-barat daya.
Perairan Selat Sunda memiliki gunung api bawah laut, yaitu Gunung Api Krakatau, yang keberadaannya adalah konsekuensi dari pertemuan antara Lempeng India-Australia dengan Lempeng Eurasia. Kondisi morfologi dasar laut yang didasarkan pada hasil pengukuran kedalaman dasar laut (Kuntoro, 1990),
memperlihatkan penampakan pola alur dasar laut berupa lembah yang dalam dan di beberapa tempat menyempit dengan kelerengan yang terjal. Hal ini menunjukkan bahwa sekitar perairan ini merupakan daerah berarus cukup kuat dan berpotensi membentuk longsoran di dasar laut (mass movement).
pantainya sangat rata dan dipengaruhi oleh aktifitas pasang surut sejauh 2 km sedangkan pada sisi Jawa morfologi dasar lautnya ditandai dengan lereng yang
15
3. METODE PENELITIAN
3.1. Waktu dan Lokasi Penelitian
Penelitian ini menggunakan data side scan sonar yang berasal dari survei lapang untuk kegiatan pemasangan kabel PLN yang telah dilakukan oleh Pusat Penelitian dan Pengembangan Geologi Laut (PPPGL) pada bulan Mei tahun 2008. Lokasi penelitian berada di perairan Selat Sunda pada koordinat 5° 40' 00" LS - 6° 00' 00" LS dan 105° 40' 00" BT - 106° 10' 00" BT. Peta lokasi penelitian dapat dilihat pada Gambar 6. Pengolahan data dilakukan di Laboratorium Akustik Kelautan Fakultas Perikanan dan Ilmu Kelautan, Departemen Ilmu dan Teknologi Kelautan, Institut Pertanian Bogor dan di Pusat Penelitian dan Pengembangan Geologi Laut (PPPGL) Bandung mulai Febuari 2012 hingga Juni 2012.
3.2. Pengambilan Data Side Scan Sonar
Pengambilan data side scan sonar menggunakan Klein System 3000 sebanyak 11 lintasan dengan menggunakan metode survei pararel transek. Spesifikasi alat yang digunakan ditunjukkan pada Tabel 2. Alat ini dioperasikan dengan menggunakan seperangkat komputer untuk merekam data secara real time, dan Global Positioning
System (GPS) yang terpasang di kapal untuk mengetahui posisi lintang (latitude) dan
bujur (longitude). Side scan sonar mempunyai frekuensi ganda yaitu 100 kHz (50 µs) dan 500 kHz (25 µs), dengan software akusisi yang digunakan adalah sonarPro.
Tabel 2. Spesifikasi Side scan sonar Klein 3000
Spesifikasi Keterangan
Frequencies 100 kHz dan 500 kHz Range Scales 15 settings - 25 to 1,000 meters
Maximum Range 600 meters @ 100 kHz; 150 meters @ 500 kHz
Depth Rating 1.500 meters
Construction Stainless Steel
Size 122 cm long, 8,9 cm diameter
Weight 29 kg in air
Standard Sensors Roll, pitch, heading
Beam Width 0,7 deg. @100 kHz, 0,21 deg. @ 500 kHz Beam Tilt 5, 10, 15, 20, 25 deg
Power Supply 120 watt @120/240 VAC, 50/60 Hz Sumber: http://www.l-3klein.com/
Proses pengambilan data side scan sonar dilakukan dengan menggunakan
towfish atau tow vehicle yang ditarik di belakang kapal menggunakan tow cable.
17
setelah mengenai objek di dasar laut. Energi yang dipantulkan kembali ini dikenal sebagai backscatter akustik. Backscatter akustik direkam dalam jangka waktu tertentu pada setiap ping, sehingga dapat dibentuk sebuah time series (urutan) dari amplitudo yang diterima. Pembuatan mosaik data side scan dilakukan dengan menggabungkan semua data di sepanjang track kapal yang dilalui oleh side scan sonar.
3.3. Pemrosesan Data
3.3.1. Pemrosesan Data Side Scan Sonar
Pemrosesan data mentah Side Scan Sonar dimulai dari penggunaan software
SonarPro untuk menentukan target beserta dimensinya dan mengetahui posisi atau koordinat dari target tersebut. Selain itu dapat diketahui pula berbagai informasi seperti kedalaman, kecepatan kapal, dan waktu pengambilan data, serta towfish
altitude. Setelah menentukan target dan nomor ping pada SonarPro, tahapan
selanjutnya yaitu melakukan ekstrak raw data side scan sonar pada beberapa
software seperti SonarWeb, Xtf2segy, SeiSee, dan Microsoft Excel.
SonarWeb digunakan untuk mengubah file yang berekstensi *sdf menjadi
*xtf. Selanjutnya digunakan software Xtf2segy untuk mengubah file menjadi *segy. Berikutnya buka data menggunakan SeiSee, simpan data dalam ekstensi trace sample
text file. Selanjutnya data diolah menggunakan Microsoft Excel untukmenganalisis
rumit dan berfluktuatif. Selanjutnya data diolah menggunakan metode continous
wavelet transform pada program Matlab untuk mendapatkan karakter sinyal yang
khas dari objek dasar laut di perairan Selat Sunda. Diagram alir pemrosesan data ini ditunjukkan pada Gambar 7.
Gambar 7. Diagram Alir Pemrosesan Data Side Scan Sonar
3.3.2. Pemrosesan Data Pemetaan Dasar Perairan
Proses pengolahan mosaik data side scan sonar dilakukan pada perangkat lunak SonarWeb. Mosaik merupakan penyatuan area yang berdekatan yang mempunyai tingkat overlapping yangdihasilkan dari lintasan survei yang dilalui kapal pada saat melakukan seabed mapping. Hasil keluaran mosaik data side scan
sonar ini dalam format geotiff. Selanjutnya mosaik ini akan diolah menggunakan
perangkat lunak ArcGis untuk mengintegrasikan data mosaik tersebut dengan koordinat target atau objek yang telah ditentukan sebelumnya menggunakan perangkat lunak SonarPro.
Matlab (CWT) Ms.Excel (Mengatur
susunan data *txt) SeiSee (Segy ke *txt)
SonarWiz (*Xtf ke *CSF kemudian *CSV)
19
3.3.3. Pemrosesan Data Batimetri
Pemrosesan data ini dimulai dengan memasukan peta SRTM 30 Plus pada
Global Mapper 8.01 kemudian pilih export data menggunakan Export Vector Data
(Export Surfer BLN) dalam bentuk *bln pada menu File agar dapat diolah pada Surfer
8.0. Masukkan koordinat lokasi perairan Selat Sunda. Langkah selanjutnya buka perangkat lunak Surfer 8.0. Lakukan grid data untuk melihat ada tidaknya data yang bermasalah atau error. Selanjutnya klik menu Map kemudian pilih new contour map
untuk menampilkan peta batimetri secara 2 dimensi dan pilih 3D Surface untuk menampilkan peta batimetri secara 3 dimensi.Diagram alir dari pemrosesan data batimetri ini ditunjukkan pada Gambar 8.
Gambar 8. Diagram Alir Proses Pengolahan Batimetri dengan SRTM 30 Plus Import data *.srtm pada Global Mapper 8
Masukan lintang dan bujur
Export Data dalam bentuk *.bln
Pengolahan pada Surfer
8.0 untuk file *.bln
Contour Map (Plot 2D)
Surfer 8.0 Grid (Kringging)
Surface (Plot 3D)
3.4. Analisis Data
3.4.1. Analisis Sinyal Akustik
Nilai amplitudo yang diperoleh dari Seisee kemudian diolah dengan beberapa perhitungan akustik sehingga diperoleh nilai echo level dan backscatter.
EL = 20 log [ ] ...(3)
Sistem side scan sonar memindai dasar laut dengan cara horizontal
menyamping sehingga ada parameter dan metode tertentu yang membedakan side
scan sonar dengan intrumen akustik lainnya, seperti parameter range R (slant range)
dan depth H. Range dalam side scan sonar merupakan jarak antara towfish terhadap
objek pindai yang berupa garis miring, sedangkan kedalaman yang terekam oleh side scan sonar adalah altitude atau jarak vertikal antara towfish dan objek pindai,
sehingga nilai backscatter dapat dihitung dengan rumus berikut (Lurton, 2002) :
EL = SL– 30 log R - 2αR + 10 log [ ] + BSB ...(4)
Keterangan :
EL = Echo Level (dB) R = Slant Range (m)
SL = Source Level (dB) α = Koefisien Absorpsi
21
3.4.2. Analisis Wavelet Transform
Analisis data side scan sonar mengunakan wavelet transform (Simonsen et al, 1998 dalam Simons et al., 2005) :
a : Parameter skala yang mengendalikan fungsi wavelet b : Parameter penentuan pergeseran dari wavelet
C ψ : Normalisasi nilai konstan yang ditentukan oleh transformasidari wavelet
Klasifikasi dari gambar side scan sonar merupakan dasar dalam mengamati tekstur dasar perairan. Karakteristik gambar dapat diketahui dengan perhitungan statistik dengan menggunakan wavelet.
Seperti persamaan dua dimensi wavelet transform (Mavroidis et al., 2008):
3.5. Pengambilan Sampel Sedimen
Pengambilan sampel sedimen permukaan dasar laut dilakukan untuk
mengetahui keseragaman dari tekstur ukuran butirnya. Penggunaan gravity core dan
grab sampler untuk pengambilan contoh sedimen permukaan di perairan Selat Sunda
bergantung pada kondisi sedimen di wilayah perairan. Penggunaan kedua peralatan dalam pengambilan sampel dilakukan untuk mendapatkan hasil sampel sedimen yang maksimal. Gambar dan spesifikasi alat dari gravity core dan grab sampler yang digunakan dapat dilihat pada Lampiran 1. Setelah mendapatkan sampel sedimen selanjutnya sampel tersebut di analisa menggunakan metode ayakan bertingkat untuk mengetahui ukuran butiran pada sedimen.
23
4
.
HASIL DAN PEMBAHASAN
4.1. Batimetri Selat Sunda
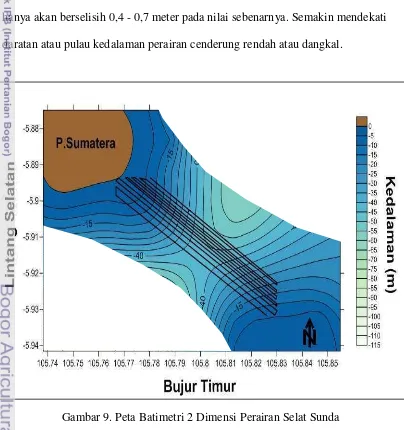
Peta batimetri adalah peta yang menggambarkan bentuk konfigurasi dasar laut dinyatakan dengan angka-angka suatu kedalaman dan garis-garis yang mewakili kedalaman tersebut. Peta batimetri memiliki arti penting dalam sebuah penelitian karena akan memudahkan mengetahui kondisi morfologi serta sejarah geologi suatu lokasi perairan. Selat Sunda merupakan selat yang membujur dari arah timur laut menuju barat daya di ujung barat Pulau Jawa atau ujung selatan Pulau Sumatera. Kedalaman perairan Selat Sunda bertambah secara bertahap ke arah Samudra Hindia.
Pada penelitian ini digunakan peta batimetri secara 2 dimensi dimana menggunakan data batimetri SRTM 30 plus pada perairan Selat Sunda yang diolah menggunakan perangkat lunak Surfer. Gambar 9 menampilkan kontur batimetri perairan secara 2 dimensi dimana daerah yang berwarna coklat merupakan daratan yaitu bagian dari pulau Sumatera. Gambar 9 juga
menunjukkan lintasan survei pengambilan data side scan sonar yang digambarkan dengan garis berwarna hitam.
Perairan Selat Sunda termasuk dalam kategori perairan dangkal dimana kedalaman perairannya kurang dari 200 meter. Terdapat adanya variasi kedalaman perairan yang berbeda untuk setiap posisi lintang dan bujur. Batimetri pada
diketahui tipe pasang surut perairan Selat Sunda adalah campuran dominan ganda. Hal ini diperoleh dari hasil perhitungan bilangan Formzahl. Ketika muka laut pasang, arus pasut akan mengalir ke arah timur laut menuju Laut Jawa dengan kisaran kecepatan antara 0,51-0,72 m/dtk, sedangkan pada saat muka laut surut, arus pasut akan mengalir ke arah barat daya menuju Samudera Hindia dengan kisaran kecepatan antara 0,48-0,51 m/dtk. Berdasarkan data arus pasut ini dapat dikatakan nilai kedalaman perairan tidak akan berbeda jauh walaupun saat
pengambilan data terjadi pasang tertinggi ataupun surut terendah. Nilai kedalaman hanya akan berselisih 0,4 - 0,7 meter pada nilai sebenarnya. Semakin mendekati daratan atau pulau kedalaman perairan cenderung rendah atau dangkal.
25
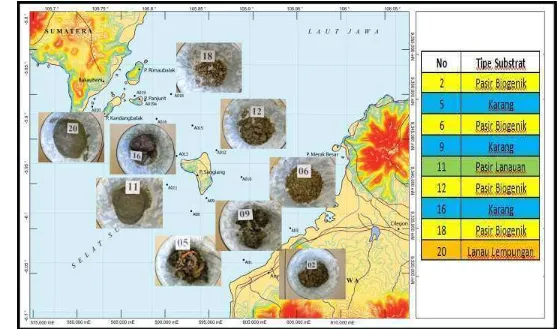
4.2. Sebaran Sedimen Permukaan Dasar Laut
Gambar 10 menggambarkan sebaran sedimen permukaan dasar laut di Selat Sunda beserta pemberian nama tipe substrat dimana peta ini diambil pada waktu yang berbeda yaitu pada pertengahan bulan Maret – awal bulan April 2010 yang merupakan hasil kegiatan lapang Puslitbang Geologi Kelautanuntuk
kegiatan pembangunan jembatan Selat Sunda. Pengambilan sampel sedimen dilakukan sebanyak 22 titik. Data coring hasil survei ini dapat dilihat pada Lampiran 5. Penggunaan gravity core dan grab sampler untuk pengambilan contoh sedimen permukaan di perairan Selat Sunda tergantung pada kondisi sedimen setempat. Penggunaan kedua peralatan dalam pengambilan sampel juga dilakukan untuk mendapatkan hasil sampel sedimen yang maksimal. Penginti gaya berat (gravity core) digunakan untuk memperoleh contoh sedimen berbentuk inti dengan panjang 1 sampai 2 meter dengan diameter 6 inci, dan biasanya efektif untuk sedimen yang belum terpadatkan (unconsolidated sediment) dengan ukuran butir lumpur atau yang lebih halus sedangkan yang lebih kasar seperti pasir sulit didapatkan dikarenakan tidak bersifat lengket (stiff).
26
Gambar 10. Peta Sebaran Sedimen Permukaan Dasar Laut (PPPGL, 2010)
27
Distribusi sebaran regional sedimen pada Selat Sunda ditunjukkan pada Gambar 11 dimana gambar ini diperoleh dari hasil penelitian tahun 2004 oleh PPPGL dimana menggunakan prinsip interpolasi dari beberapa data hasil pengambilan sampel sedimen sehingga dapat mengetahui tipe sebaran sedimen dalam cakupan luasan area tertentu. Pada area pengambilan data side scan sonar
tipe sebaran sedimennya terdiri dari pasir sedikit kerikilan dan pasir lumpuran sedikit kerikilan. Secara umum dapat dikatakan bahwa lokasi pengambilan data
side scan sonar didominasi oleh tipe sedimen pasir sedikit kerikilan. Semakin
mendekati daratan tipe sedimennya berupa pasir lumpuran sedikit kerikilan yang ukuran partikelnya lebih besar. Semakin mendekati Samudera Hindia tipe sedimennya didominasi oleh pasir lumpuran kerikilan yang ukuran partikelnya lebih kecil dan halus bila dibandingkan dengan pasir sedikit kerikilan.
Gambar 11. Sebaran Regional Sedimen Permukaan Dasar laut
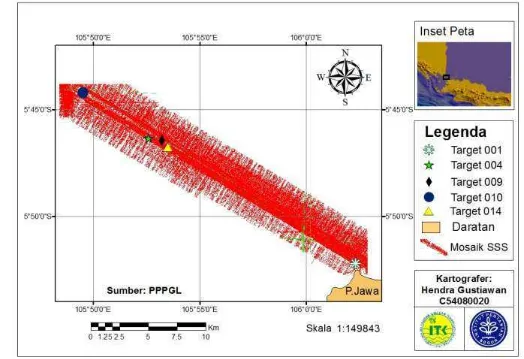
4.3. Hasil Side Scan Sonar secara Kualitatif 4.3.1. Mosaik Side Scan Sonar
Mosaik merupakan penyatuan data hasil pemetaan dasar laut
menggunakan instrumen side scan sonar yang memiliki tingkat overlapping. Mosaik dapat memberikan gambaran lintasan survei secara keseluruhan selama proses pengambilan data berlangsung.Perangkat lunak Sonarweb digunakan untuk pemrosesan data side scan sonar dengan format *sdf yang akan
menghasilkan suatu mosaik. Semakin banyak data yang digunakan maka akan semakin baik kualitas mosaiknya. Gambar 12 menunjukkan mosaik data side scan
sonar pada Selat Sunda yang di overlay menggunakan perangkat lunak ArcMap
9.3. Data yang digunakan berupa mosaik side scan sonar dengan format *geotiff
yang selanjutnya di overlay dengan koordinat dari masing-masing target dan sampel sedimen yang diamati serta Pulau Sumatera dan Pulau Jawa yang dijadikan sebagai base map atau peta dasarnya.
Side scan sonar menggunakan prinsip backscatter akustik dalam
mengindikasikan atau membedakan kenampakan bentuk dasar laut atau objek di dasar laut (Russel, 2001). Material seperti besi, bongkahan, kerikil atau batuan vulkanik merupakan backscatter kuat yang merefleksikan pulsa akustik dengan baik sedangkan sedimen halus seperti tanah liat, lumpurmerupakan backscatter
lemah yang kurang baik dalam merefleksikan pulsa suara. Reflektor kuat akan menghasilkan backscatter yang kuat sedangkan reflektor lemah akan
29
Gambar 12. Mosaik Data Side Scan Sonar di Selat Sunda
4.3.2. Image Target Side Scan Sonar
Image target side scan sonar berasal dari data survei lapang kemudian diolah menggunakan perangkat lunak SonarPro untuk pengolahan data secara kualitatif, berupa dimensi atau ukuran objek dasar laut. Terdapat perbedaan yang mendasar antara cara kerja SonarPro dengan cara kerja manual yaitu pada proses untuk mendapatkan data numerisnya. Data numeris yang didapatkan dari hasil kerja manual dilakukan dengan cara mengukur jarak secara grafis dengan
menggunakan penggaris atau alat ukur jarak manual lainnya, kemudian dikalikan skala. Jarak yang didapat merupakan jarak miring, sehingga untuk mendapatkan jarak mendatar (horisontal) dan jarak tegak (vertikal) harus dilakukan hitungan pitagoras. Sedangkan data numeris yang didapatkan dari hasil kerja perangkat lunak SonarPro dilakukan dengan tools yang berfungsi mengukur jarak secara grafis. Jarak miring, jarak mendatar, dan jarak tegak didapatkan langsung pada saat pengukuran jarak, sehingga tidak perlu dilakukan dengan hitungan pitagoras.
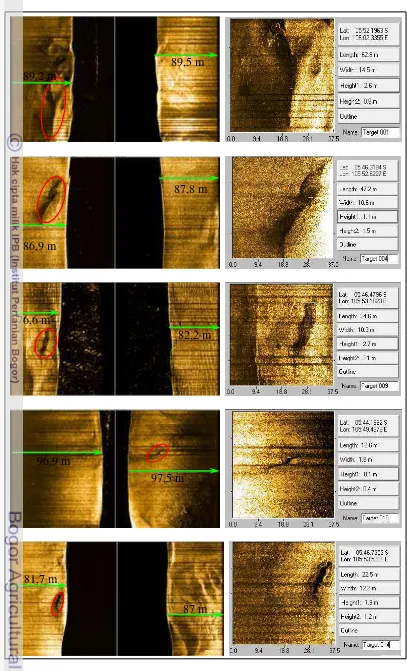
Gambar 13 merupakan hasil pengolahan data side scan sonar secara kualitatif dimana terdapat 5 objek yang berbeda. Masing-masing objek diberi nama Target yang terdiri atas Target 001, Target 004, Target 009, Target 010, dan Target 014. Pada tiap target dilakukan penghitungan dimensi target menggunakan
tools pada SonarPro. Terlihat pada gambar bahwa masing-masing target
31
dimensinya 12,6 x 1,8 x 0,1 meter. Target yang terakhir yaitu Target 014 berukuran 22,5 x 12,2 x 1,9 meter.
Gambar 13 juga menunjukkan jangkauan pencitraan maksimum
(maximum range) masing-masing target. Pada Target 001 maximum range sebelah
kirisebesar 89,2 meter dan sebelah kanan sebesar 89,5 meter. Target 004
maximum range sebelahkiri berukuran 86,9 meter dan sebelah kanan berukuran
87,8 meter. Ukuran maximum range sebelah kiri dan kanan Target 009 merupakan
maximum range terkecil dimana berukuran 76,6 meter dan 82,2 meter. Ukuran
maximum range terbesar terdapat pada Target 010 dimana sebesar 96,9 meter dan
97,5 meter. Ukuran maximum range target terakhir yaitu Target 014 sebesar 81,7 meter dan 87 meter.Ukuran maximum range tiap target berbeda-beda walaupun dalam pengambilan datanya digunakan alat dan frekuensi yang sama. Hal ini dipengaruhi oleh pergerakan towfish yang berubah-ubah yang dipengaruhi arus dan gelombang pada saat akuisisi atau perekaman data berlangsung.
Gambar 13. Hasil Interpretasi Kualitatif Target Side Scan Sonar
89,5 m 89,2 m
87,8 m
96,9 m
82,2 m
97,5 m 76,6 m
86,9 m
81,7 m
33
4.4. Hasil Side Scan Sonar secara Kuantitatif
Gambar 14 merupakan grafik analisis sinyal dimana sumbu-x merupakan waktu dalam satuan detik dan sumbu-y merupakan nilai backscatter dalam satuan desibel. Gambar 14 menampilkan hubungan nilai backscatter terhadap waktu dimana digunakan selang waktu selama 10 detik. Hal ini bertujuan memudahkan dalam melakukan perbandingan antara tiap grafik yang dihasilkan dari masing-masing target. Tiap grafik mempunyai warna yang berbeda-beda dimana memudahkan dalam mencirikan nilai backscatter dari masing-masing target.
Target 010 merupakan target yang mendominasi nilai backscatter yang dicirikan dengan tingginya grafik berwarna biru. Berdasarkan Gambar 14 diketahui bahwa nilai backscatter terbesar pada target 010 berada pada selang waktu 9,4 detik dengan nilai sebesar -4,0 dB sedangkan nilai backscatter terkecil berada pada Target 004 dengan nilai backscatter sebesar -46,0 dB pada selang waktu 5 detik. Nilai backscatter terbesar Target 001 berada pada selang waktu 2,5 detik sebesar -14 dB, sedangkan pada Target 009 dan 014 masing-masing sebesar -10 dB dan -6 dB pada selang waktu 9,3 detik dan 4 detik.
Target 010 mempunyai keunikan dimana merupakan target dengan nilai
backscatter terbesar walaupun ukurannya terkecil. Hal ini dapat terjadi karena
dipengaruhi oleh 3 faktor yaitu densitas, porositas, dan ukuran diameter objek (Manik dalam Sonar Systems, 2011). Semakin keras objek atau sedimen di dasar laut maka nilai backscatter juga akan semakin besar (Jackson et al., 1996 dalam Ehrhold et al., 2006). Target 010 diduga merupakan benda padat yang partikel penyusunnya berupa logam sehingga membuat perbedaan kisaran nilai
Gambar 14. Hubungan Nilai Backscatter terhadap Waktu Tiap Target
35
Gambar 15 merupakan hasil dari transformasi wavelet tipe Daubenchies
dengan orde 8dimana merupakan tipe wavelet yang dapat memberikan tingkat pengenalan karakter sinyal paling tinggi yaitu sebesar 86% (Agustini, 2006). Sumbu-x merupakan faktor skala (scale) yang menyimpan informasi mengenai waktu dan sumbu-y merupakan posisi (shift) yang menyimpan informasi mengenai frekuensi (Burrus et al., 1998). Pada penelitian ini digunakan rentang nilai waktu 0-200 mdtk dan skala yang digunakan yaitu 1:1:50. Hal ini berarti setiap hasil wavelet dimulai dari skala 1 sampai 50 dengan perubahan nilai tiap 1 satuan
hampir sebagian awal gambar yaitu dari 0-100 mdtk. Kisaran energi tertinggi berada pada selang waktu 60-80 mdtk dengan nilai sebesar 60 dB2/Hz.
37
Gambar 15. Transformasi Wavelet Kontinu Tiap Target Continuous Wavelet Transform Target 001
Continuous Wavelet Transform Target 010 Continuous Wavelet Transform Target 004
Continuous Wavelet Transform Target 009
38
5. KESIMPULAN DAN SARAN
5.1. Kesimpulan
Berdasarkan hasil interpretasi data secara kualitatif terdapat 5 objek yang berbeda terdiri dari Target 001, Target 004, Target 009, Target 010, dan Target 014. Target 001 merupakan target terbesar dengan ukuran 62,8 x 14,5 x 2,6 meter
sedangkan Target 010 merupakan target terkecil dengan dimensi 12,6 x 1,8 x 0,1 meter. Target 009 merupakan target dengan nilai maximum range terkecil dimana berukuran 76,6 meter dan 82,2 meter sedangkan Target 010 merupakan target dengan nilai maximum range terbesar dimana berukuran 96,9 meter dan 97,5 meter.
Pada interpretasi secara kuantitatif menunjukkan bahwa nilai backscatter
terbesar Target 001 berada pada selang waktu 2,5 detik sebesar -14 dB, sedangkan pada Target 009 dan 014 masing-masing sebesar -10 dB dan -6 dB pada selang waktu 9,3 detik dan 4 detik. Secara keseluruhan Target 010 mempunyai nilai backscatter
tertinggi dengan nilai sebesar -4,0 dB pada selang waktu 9,4 detik sedangkan nilai
backscatter terkecil berada pada Target 004 dengan selang waktu 5 detik dan nilai
backscatter sebesar -46,0 dB. Target 010 merupakan target terkecil dengan nilai
backscatter terbesar. Target 010 diduga merupakan benda padat yang partikel
penyusunnya berupa logam.
39
140-160 mdtk. Pada Target 009 kisaran energi tertinggi kurang dari 10 dB2/Hz pada selang waktu 120-140 mdtk. Pada Target 010 mempunyai kisaran energi tertinggi yaitu sebesar 60 dB2/Hz dengan frekuensi terbanyak pada selang waktu 0-20 mdtk. Kisaran energi tertinggi Target 014 berada pada selang waktu 60-80 mdtk dengan nilai sebesar 60 dB2/Hz. Semakin besar nilai backscatter maka warna yang dihasilkan akan semakin terang atau lebih putih pada grafik transformasi wavelet.
5.2. Saran
40
DAFTAR PUSTAKA
[Anonim]. 2012. Klein 3000. [Diunduh pada tanggal 28 Frebuari 2012]. http://www.l-3klein.com/.
[Anonim]. 2012. Side Scan Sonar. [Diunduh pada tanggal 10 Mei 2012]. http://gulfofmexico.marinedebris.noaa.gov
Agustini K. 2006. Perbandingan Metode Transformasi Wavelet Sebagai Praproses Pada Sistem Identifikasi Pembicara. Tesis. Sekolah Pasca Sarjana. Institut Pertanian Bogor. Bogor.
Bartholoma A. 2006. Acoustic bottom detection and seabed classification in the German Bight, southern North Sea. Springer : Wilhelmshaven, Germany. Vol (26): 177 – 184.
Blott JS dan Kenneth P. 2001. Gradistat: A Grain Size Distribution and Statistics Package for The Analysis of Unconsolidated Sediments. Royal
Holloway University of London. London.
Burrus CS, Gopinath RA, dan Guo H. 1998. Introduction to Wavelets and Wavelet
Transform. Prentice Hall. New Jersey.
Castleman KR. 1996. Digital Image Processing. Prentice Hall: Englewood Cliffs. New Jersey.
Chakraborty B, Mahale V, Navelkar G, Rao BR, Prabhudesai RG, Ingole B, Janakiraman G. 2007. Acoustic characterization of seafloor habitats on the western continental shelf of India. ICES Journal of Marine Science. 64(3): 551-558.
Charnila D dan Manik HM. 2010. Pemetaan dan Klasifikasi Sedimen Dengan Menggunakan Instrumen Side Scan Sonar Di Perairan Balongan Indramayu- Jawa Barat. Jurnal Teknologi Perikanan dan Kelautan. 1(1): 105-112.
Ehrhold AD, Hamon, dan B Guillaumont. 2006. The REBENT monitoring network, a spatially integrated, acoustic approach to surveying nearshore acrobenthic habitats:application to the Bay of Concarneau (South Brittany, France). ICES
Journal of Marine Science (63): 1604-1615.
Evans RJ, Stewart SA, dan Davies RJ. 2007. Phase-reversed seabed reflections in seismic data: examples related to mud volcanoes from the South Caspian Sea.
41
Foster DJ, Mosher CC, Hassanzadeh S. 1994. Wavelet transform methods for phase identification in three component seismograms. Bulletin of Seismological
Society of America. 87 (6): 1598-1612.
Garrison T. 2005. Oceanography: An Invitation to Marine Science. 5ed. Thomson Learning, Inc. Connecticut. USA.
Graps A. 1995. An Introduction to Wavelets, IEEE Computational Science and Engineering. IEEE Computer Society : Loas Alamitos: CA, USA. Vol 2(2): 112-117
Greenlaw CF, Holliday DV, and McGehee DE. 2004. High-Frequency Scattering from Saturated Sand Sediment. J. Acoust. Soc. Am. 115 (6): 2818-2823
Klein Associates, Inc. 1985. Side Scan Sonar Record Interpretation.Klein Associates, Inc.New Hampshire. USA.
Kuntoro, Kusnida D, Surachman M, Silalahi IR, YuningsihA, Setiady D,
Rahardiawan R, Budiman, dan Hartono. 1990. Laporan Penyelidikan Geologi
dan Geofisika Perairan Selat Sunda dan Sekitarnya, Lembar Peta 1110,
Publikasi Intern Pusat Penelitian dan Pengembangan Geologi Bandung. Bandung
Lurton X. 2002. An Introduction to Underwater Acoustic. Springer. Praxis. Chichester, UK.
MacLennan DN dan Simmonds EJ. 2005. 2th Fisheries Acoustic: Theory and
Practice. Blackwell Science. Oxford. UK.
Mahyuddin MF. 2008. Penggunaan Perangkat Lunak Sonar Pro Untuk Pengolahan Data Side Scan Sonar. Skripsi. Fakultas Ilmu dan Teknologi Kebumian. Institut Teknologi Bandung. Bandung.
Manik HM, Marsugi S, dan Susilohadi. 2012. Detection of Underwater Target Using High Frequency Sonar. Proceeding of International Symposium on Earth
Science and Technology. 18-19 September 2012. Bandung.
Manik HM. 2011. Underwater Acoustic Detection and Signal Processing Near the Seabed. Di dalam: Kolev N, editor. Sonar Systems. Williampark. Croatia. hlm 255-274.
Manik HM. 2006. Study on Acoustic Quantification of Sea Bottom Using
Quantitative Echo Sounder. [Disertasi]. Tokyo University of Marine Science
Mavroidis T, G Vardoulias, A Georgiadis, I Koukos, dan M Taroudakis. 2008. Two Dimensional Wavelet Coefficient Statistics for Sea Bottom Classification. Serres Institute of Technology. Serres. Greece.
Medwin H and Clay CS. 1998. Fundamentals of Acoustical Oceanography.
Academic Press. New York.
Noviadi Y. 2010. The Seafloor Morphologhy of Sunda Strait for Laying The Underwater Cables. Bulletin of the Marine Geology. 25(2): 103-113. Oktavia R, Pariwono JI, dan Manurung P. 2011. Variasi Muka Laut dan Arus
Geostrofik Permukaan Perairan Selat Sunda Berdasarkan Data Pasut dan Angin Tahun 2008. Jurnal Ilmu dan Teknologi Kelautan Tropis. Vol 3(2): 127-152. Percival DB dan Walden AT. 2000. Wavelet Methods for Time Series Analysis.
Cambridge University Press. Cambridge. United Kingdom
Russel I. 2001. Basic Principles of Hydrographic Surveying. Hydrographic
Awareness. Seminar and Course: The Importance of Hydrographic Survey for
Management and Development of The Coastal Zone. 24-27 April 2001. Jakarta.
Sari SP dan Manik HM. 2009. Deteksi dan Interpretasi Target di Dasar Laut Menggunakan Instrumen Side Scan Sonar. Seminar Nasional Teori dan
Aplikasi Teknologi Kelautan. 17 Desember 2009. Surabaya. hlm A 25-30.
Setiady D. 2005. Penentuan Asal Sedimen Permukaan Dasar Laut Berdasarkan
Analisis Besar Butir dan Mineral Berat. Kumpulan Abstrak Tesis. Teknik
Geologi. Institut Teknologi Bandung. Bandung
Urick RJ. 1983. Principles of Underwater Sound. 3rd ed. Mc-Graw-Hill. New York. Wibisono MS. 2005. Pengantar Ilmu Kelautan. Grasindo. Jakarta.
43
Lampiran 1. Gambar dan spesifikasi Gravity Core dan Grab Sampler
(a) Gravity Core (b) Grab Sampler
Spesifikasi dari gravity core yang digunakan
Diameter tabung : 2,5 inchi
Panjang : 100 cm
Pemberat : 60 kg
Panjang kabel : sesuai kedalaman perairan sampai 150 m
45
Lampiran 2. Data Sampel Nilai Waktu dan Backscatter Target 001
Time Backscatter Time Backscatter Time Backscatter Time Backscatter Time Backscatter
(ms) (dB) (ms) (dB) (ms) (dB) (ms) (dB) (ms) (dB)
0.861 -20.059056 2.419 -26.079656 3.977 -22.557831 5.535 -29.002217 7.093 -27.418592
0.902 -18.899217 2.46 -25.480392 4.018 -14.038456 5.576 -49.002217 7.134 -33.439192
0.943 -33.439192 2.501 -35.022817 4.059 -17.876167 5.617 -36.961017 7.175 -32.100256
0.984 -24.919817 2.542 0 4.1 -33.439192 5.658 -26.079656 7.216 -26.72335
1.025 -32.100256 2.583 0 4.141 -29.002217 5.699 -29.002217 7.257 -21.397992
1.066 -42.981617 2.624 -16.133163 4.182 -39.459792 5.74 -26.72335 7.298 -13.439192
1.107 -22.153763 2.665 -17.406545 4.223 -33.439192 5.781 -42.981617 7.339 -24.919817
1.148 -21.76766 2.706 -30.940417 4.264 -19.459792 5.822 -26.079656 7.38 -26.079656
1.189 0 2.747 -32.100256 4.305 -39.459792 5.863 -22.981617 7.421 -21.397992
1.23 0 2.788 -27.418592 4.346 -42.981617 5.904 0 7.462 -27.418592
1.271 0 2.829 -19.174983 4.387 -14.850813 5.945 -18.120856 7.503 -32.100256
1.312 -3.611958 2.87 -30.940417 4.428 -22.557831 5.986 -15.74706 7.544 -24.393238
1.353 -42.981617 2.911 -22.981617 4.469 -29.002217 6.027 -33.439192 7.585 -36.961017
1.394 -32.100256 2.952 -23.427145 4.51 -23.427145 6.068 -24.919817 7.626 -26.72335
1.435 -30.940417 2.993 -29.002217 4.551 -33.439192 6.109 -26.079656 7.667 -20.70275
1.476 -22.557831 3.034 -35.022817 4.592 0 6.15 -28.174363 7.708 -17.638182
1.517 -21.043417 3.075 -36.961017 4.633 -18.899217 6.191 -12.74395 7.749 -29.002217