BAB 2
TINJAUAN PUSTAKA
2.1. Teori Chaos
Jacques Hadamard pada tahun 1898 menerbitkan suatu tulisan tentang gerakan yang tidak stabil atau acak dari suatu “arah peluru”. Ia menunjukkan bahwa semua arah peluru yang ditembakkan dari senapan memiliki arah yang berbeda dan menyimpang dari senapan memiliki arah yang berbeda dan menyimpang satu sama lainnya. sementara itu istilah “chaos” dirumuskan pertama kali oleh Henri
Poincare (1854-1912), seorang ahli matematika perancis. Ia menemukan bukti bahwa sistem tata surya tidak bekerja secara teratur dan dapat diprediksi dengan pasti. Ia mengungkapkan bahwa “dapat terjadi perbedaan kecil pada kondisi awal menghasilkan peristiwa yang berdampak sangat besar. Sebuah kesalahan kecil pada permulaannya akan menghasilkan peristiwa yang berdampak sangat besar. Sebuah kesalahan kecil pada permulaannya akan menghasilkan penyimpangan yang lebih besar. Semula gagasan Henri Poincare tidak terlalu dihargai oleh para ilmuan pada saat itu, sampai penemuan computer yang memungkinkan pada ahli membuat model dan menggambarkan sistem chaostik.
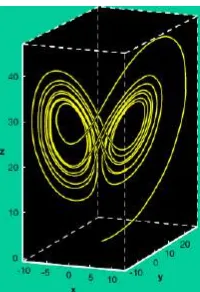
Gambar 2.1 Model Cuaca Edward Loretz (Sahid, 2003)
keseragaman dari data yang kelihatannya acak. Teori ini ditemukan secara tidak sengaja, Lorenz pada saat itu sedang mencari penyebab mengapa cuaca tidak bisa diramalkan. Penemuan ini memunculkan model yang lebih sederhana yang disebut efek kupu-kupu (butterfly effect). Suatu perbedaan kecil akan mengubah pola secara keseluruhan.(Kusmarni, 2005).
Teori chaos merupakan suatu teori yang menjelaskan perubahan yang bersifat kompleks dan tak dapat diprediksi atau sistem-sistem dinamik yang peka terhadap kondisi awal. Sistem chaos secara matematis bersifat deterministic (sebagai lawan sifat probabilistic), yakni mengikuti hukum-hukum yang persis, tetapi perilaku ketakberanturannya dapat tampak seperti bersifat acak bagi pengamat awam. Perilaku chaos dapat terjadi berbagai sistem berbagai sistem seperti rangkaian listrik, penyebaran penyakit campak, laser, roda bergigi (gir) yang meleset, irama denyut jantung, aktivitas elektris otak, irama sirkulasi darah daam tubuh, populasi binatang, dan reaksi kimia. Lebih daripada itu, bahkan diyakini bahwa sistem ekonomi, seperti stock exchange, dapat bersifat chaos. Studi mengenai masalah chaos secara cepat berkembang dari kajian teoritis matematis ke ilmu-ilmu terapan.(Sahid, 2003)
Pendekatan yang memadukan eksperimen numerik dan analisis matematika telah melahirkan bidang antar disiplin baru yang disebut dinamika tak linier (nonlinier dynamics). Bidang ini mencakup pelbagai problema tak linier seperti reaksi kimia, control umpan balik (feedback) untai listrik, interaksi populasi biologis, respon sel jantung terhadap impuls listrik, naik turunya harga, dan pembangunan mesin perang dua Negara yang bermusuhan.
Para ahli dinamika tak linier menggunakan istilah “chaos” untuk tingkah
laku tak teratur dan tak terprakirakan dalam sistem tak linier deterministik. Bahkan diketahui pula sistem-sistem sederhana dengan hanya satu atau dua derajat kebebasan saja dapat bersifat chaos. (Setiawan, 1991)
Gerakan chaos dalam dinamika sistem sederhana bisa diterangkan dalam hal beberapa variabel. Gerakan tersebut adalah:
2. Tidak dapat diprediksi dalam jangka panjang dan sensitif terhadap kondisi awal
3. Kompleks, tetapi nampaknya seperti beraturan dalam ruang fasa
Batas antara perilaku yang teratur dan kacau sering ditandai dengan penggandaan periode, keadaan inilah yang mengantarkan pada perilaku chaos. (Tamas, 2006)
2.1.1 Studi Chaos Secara Numerik
Studi keberatan yang muncul ketika gejala chaos dipelajari secara numerik dengan menggunakan computer digital yaitu mengenai penggunaan sekumpulan bilangan rasional berhingga dengan panjang kata berhingga (finite) dan waktu perhitungan yang juga berhingga. Hal ini menyebabkan orbit periodik yang panjang dengan orbit quasiperiodik atau orbit chaos sulit untuk dibedakan. Orbit yang teramati secara numerik hanya menampilkan orbit fiktif, karena setiap langkah dimulai dengan bilangan yang dibulatkan berbeda dengan orbit yang sebenarnya, meskipun perbedaan itu kecil.
Namun, bilangan irasional dapat didekati dengan bilangan rasional, atau sama dengan kata lain daerah chaos dikelilingi oleh daerah-daerah periodik. Strategi yang benar dalam studi computer adalah dengan mengidentifikasikan orbit periodik dengan tepat dan mencirikan gerak tak periodik. Selain itu, sistematika orbit periodik banyak sekali memberitahukan sifat gerak tak periodik yang berdekatan (dalam ruang parameter). Dan telah dibuktikan bahwa setiap periode orbit chaos fiktif dibayangi dengan orbit chaos yang sebenarnya. (Setiawan, 1991)
Studi chaos dapat juga dilakukan menggunakan kalkulator saku dengan menggunakan menggunakan hubungan matematis yang sederhana. Digunakan persamaan logistic yang diberikan pada persamaan 2.1.
𝑥′ = 𝑤𝑥(1 − 𝑥) (2.1)
mendekati 0,665. Hal ini dilakukan seterusnya untuk beberapa iterasi dan dikatakan sebagai keadaan periodik.
Selanjutnya jika nilai w dinaikkan menjadi 3,3, maka nilai x akan berganti-berganti antara nilai tinggi 0,824 dan nilai rendah 0,480, dan hal inilah yang dikatakan sebagai penggandaan periode, dan dengan melanjutkan prosedur ini, maka akan diperoleh penggandaan periode lagi, begitu seterusnya sehingga diperoleh kondisi chaos (Walker, 1991).
2.1.1.1Ruang Fasa
Ruang fasa (phase space) merupakan sarana yang bermanfaat untuk mengambarkan tingkah laku sistem-sistem yang bersifat chaos dalam bentuk geometri. Adapun yang dimaksud dengan ruang fasa dari suatu sistem adalah ruang yang secara matematika memiliki koordinat tegak lurus, dimana masing-masing koordinat mewakili variable-variabel yang diperlukan untuk menentukan keadaan sistem pada ssat tersebut. Sebagai contoh saat sebuah partikel bergerak dalam ruang tiga dimensi (x, y, z) dan memiliki momentum pada ketiga arah tersebut (Px, Py, Pz), keadaan partikel tersebut setiap saat secara lengkap dispesifikasikan dengan enam koordinat yaitu (x, y, z, px , py, pz). Ruang di mana partikel dispesifikasikan dengan enam koordinat tersebut disebut sebagai ruang enam dimensi atau ruang Γ (Baker et al, 1996).
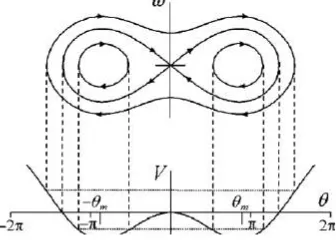
Gambar 2.2 Bawah, skala dari energi potensial V(θ) untuk sistem terkendali pada pendulum, atas, menunjukkan lintasan ruang fasa pada tiga tingkatan
Sebagai contoh pada gambar diatas tepatnya pada bagian bawah tampak energi potensial V(θ) untuk d = 0. Pada bagian atas gambar menampilkan grafik dari ω –vs– θ dan menunjukkan lintasan dari ruang fasa untuk gerak yang tidak terkendali, vibrasi teredam pada tiga nilai dari E. Pembentukan titik vibrasi dapat diilustrasikan sedikit oleh garis vertikal dan energi mekanik oleh garis titik horizontal. Arah gerak disepanjang lintasan diindikasikan oleh arah panah.
2.1.1.2Penggandaan Perioda
Perubahan kestabilan atau perubahan yang dramatis dalam suatu sistem akibat perubahan nilai parameter dinamakan bifurkasi. Dimana bifurkasi ini tidak selalu berhubungan dengan kompleksitas, tetapi terdapat beberapa jenis bifurkasi yang senantiasa berhubungan dengan bertambahkan kerumitan suatu sistem yang pada akhirnya mengakibatkan kondisi chaos.
Beberapa ahli dinamika nonlinier mengemukakan bahwa salah satu jenis bifurkasi yang terkenal adalah penggandaan periode (period doubling), yakni suatu gerakan periodik yang mengalami bifurkasi dan ‘melontarkan’ gerakan periodik yang periodenya dua kali lebih besar dari periode semula. Kemudian masing-masing gerakan periodik itu mengalami bifurkasi lagi yang sama dan begitu proses seterusnya. Masing-masing gerakan periodik yang terlontar biasanya tidak stabil, akibatnya pada suatu nilai parameter tertentu akan sangat banyak gerakan periodik yang tidak stabil dalam suatu sistem. Ketika hal itu terjadi dinamika sistem sudah sangat kompleks dan kondisi chaos terjadi lagi.
Dengan menggunakan kalkulator tangan, dengan mudah dapat diperoleh jendela periodik pertama untuk pemetaan logistik:
p = 1 0 < μ < μ1 = 0,75 p = 2 μ1 < μ < μ2 = 1,25 p = 4 = 22 μ2 < μ < μ3 = 1,3680989 p = 8 = 23 μ3 < μ < μ4 = 1,3940461
teliti, akan terlihat iterasi yang melompat antara 2n subinterval dari interval I dengan n yang berkurang dari ∞ menjadi 0 bila μ bergerak dari μ∞ menuju 2. Ini disebut sebagai deret percabangan ganda setengah periode atau deret percabangan ganda terbalikkan dari pita chaos (Setiawan, 1991).
2.1.2 Chaos dan Pengaruhnya Dalam Sains
Penemuan terhadap chaos ini mernghasilkan paradigma baru dalam pemodelan sains. Di satu sisi, hal ini mengimplikasikan batas fundamental baru dalam melakukan prakiraan. Di sisi yang lain, determinisme dalam chaos
mengimplikasikan bahwa banyak gejala acak yang lebih dapat diprakirakan daripada yang diduga sebelumnya. Chaos memungkinkan ditemukannya keteraturan dalam sistem-sistem yang tampaknya kacau-balau, dan hal ini memiliki dampak besar yang mengimbas banyak cabang ilmu pengetahuan. Berikut beberapa contoh gejala chaos dalam beberapa bidang sains:
1. Dalam bidang komunikasi, chaos tampak pada situasi yang dibangun dari masyarakat “Mellee” atau masyarakat tanpa sistem. Apa yang dipermukaan tampak tertib, teratur, jelas dan sebenarnya penuh dengan ketidakpastian. Hal ini dikarenakan hubungan dalam masyarakat bertumpu pada hubungan antar kekuatan (power relations) yang tidak selalu tercermin dalam hubungan formal masyarakat. Sehingga terjadi kesenjangan antar hubungan formal dan hubungan nyata yang didasarkan pada kekuatan.
2. Dalam bidang fisika zat padat, model osilator gandeng dalam suatu rentang parameter tertentu yang sering digunakan dalam pemodelan fisika zat padat ternyata menunjukkan gejala chaos. Selain itu, frekuensi radio dalam sambungan Josephson yang dipakai dalam penguat parametrik noise, bertambah secara luar biasa seiring dengan naiknya level gain, karena level noise yang tinggi semacam ini tak dapat dijelaskan oleh suatu sumber noise dan penguatannnya dikenal, Huberman dan sejawatnya menyatakan hal ini sebagai dinamika instrinsik sambungan tertentu.
dan EEG (Electroencephalographic) dan dalam aktivitas otak telah mendapat banyak perhatian beberapa tahun belakangan ini.
4. Dalam bidang geofisika, seperti persoalan perkiraan cuaca, dinamika atmosfer dan lautan. Fenomena El Nino, gerak gelombang Pasifik juga bagian dari dinamika chaos. Model dynamo geomagnetic juga melibatkan persamaan differensial biasa juga menampakkan tingkah laku gejala chaos.
5. Dalam kemajuan bidang sosial, Chapra mengemukakan bahwa ketidakseimbangan antara kemajuan pengetahuan yang rasional, kekuatan intelektual dan keterampilan teknologi di satu sisi derngan perkembangan kebijaksanaan, spiritualitass dan etika di sisi yang lain telah menimbulkan ketidakpastian, ketidakaturan dan chaos.
6. Dalam bidang mekanika, Lorenz dan Duffig berhasil memodelkan sistem mekanis sederhana. Vibrasi yang bersifat chaos pada tiang penyangga tempat pengeboran minyak lepas pantai juga merupakan persoalan teknik yang penting yang giat ditangani saat ini (Setiawan,1991).
7. Dalam bidang hukum, keadaan hukum di Indonesia terpuruk sejak jatuhnya orde baru sampai saat ini belum menunjukkan tanda-tanda pulih. Keadaan ini diperparah dengan berbagai perilaku pejabat negara dan warga masyarakat yang kurang terpuji menyebabkan atau menimbulkan keadaan chaos di negara Indonesia. Pendekatan legal-positivism yang linier-mekanistik dan deterministik tak mampu menjelaskan fenomena tak mampu menjelaskan fenomena ini, sehingga penjelasan dapat diberikan gambalng bila menggunakan teori chaos. (Raharjo, 2007)
2.2 Dinamika Sistem Triple Pendulum
Dinamika sistem triple pendulum merupakan sistem mekanika sederhana yang mempunyai tiga buah pendulum sederhana yang terikat pada ujungnya yang menunjukkan perilaku chaos. Gerakan pendulum ini merupakan contoh dari gerak osilasi dimana pendulumnya dapat berayun bebas dalam bidang vertikal pada sumbu atas yang diarsir sebagai respon terhadap gravitasi, g. Sistem ini merupakan sistem tiga derajat kebebasan yakni sistem yang memiliki dua buah koordinat bebas dari pergerakan massanya. Berarti sistem membutuhkan tiga buah koordinat bersama-sama untuk menentukan kedudukan massanya.
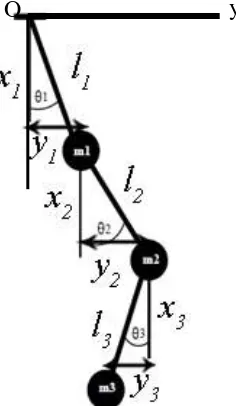
Gambar 2.3 Sistem triple pendulum dengan θ1sebagai posisi pendulum 1, θ2
sebagai posisi pendulum 2 dan θ3 sebagai posisi pendulum 3 (Andrianne
Stroup, 2004)
Sistem ini juga mengikuti konsep gerakan bersamaan dimana getaran salah satu bagian sistem menyebabkan bagian lain dalam sistem yang mana bergetar akibat gaya yang ditransmisikan melalui tali pendulum pertama. Dengan kata lain, perpindahan salah satu massa lain dalam sistem yang sama karena kedudukannya saling dihubungkan. Pendulum banyak digunakan untuk berbagai aplikasi seperti: perusahaan konstruksi yang menggunakan bola perusak besar dalam gerakan seperti pendulum ketika menghancurkan bangunan dan beberapa penghipnotis menggunakan sebuah jam saku gantung yang juga bergerak mengikuti gerakan pendulum untuk menghipnotis subjek. (McCrummen, 2015)
x
Untuk sistem triple pendulum seperti terlihat pada gambar 2.3 jelas bahwa menentukan posisi massa m1, m2 dan m3 pada berbagai waktu dibutuhkan tiga
buah koordinat dan sistem adalah tiga derajat kebebasan. Dan x1, x2, dan x3 atau y1, y2, dan y3 atau θ1, θ2, dan θ3, mungkin merupakan kelompok koordinat sistem
ini.
x1 = l1 + l2 + l3– l1cos θ1 (2.2) y1 = l1 sin θ1 (2.3) x2 = l1 + l2 + l3– l1 cos θ1– l2 cos θ2 (2.4) y2 = l1 sin θ1 + l2 sin θ2 (2.5) x3 = l1 cos θ1 + l2 cos θ2 + l3 cos θ3 (2.6) y3 = l1 + l2 + l3– l1cos θ1– l2 cos θ2− l3cos θ3 (2.7)
dimana posisi koordinat x ditinjau dari panjang keseluruhan pendulum ke tiap – tiap pendulum pada sumbu x dan posisi koordinat y ditinjau dari jarak pendulum ke titik O pada sumbu y.
2.3 Fungsi Lagrangian
Untuk mencari persamaan gerak triple pendulum, koordinat-koordinat posisi masing-masing pendulum akan dimasukkan ke Fungsi Lagrangian. Fungsi Lagrangian atau yang biasa disebut Lagrangian disimbolkan dengan L merupakan gabungan dari persamaan energi kinetik (T) dan energi potensial (V) yang diberikan:
T = ∑ 1
2 𝑚𝑛(ẋn2+ ẏn2) 3
𝑛=1 (2.8)
V = ∑3𝑛=1𝑔𝑚𝑛𝑥𝑛 (2.9)
dengan mn merupakan massa setiap pendulum, ẋn2+ ẏn2 adalah kecepatan masing
– masing pendulum dan xn adalah jarak titik dari panjang keseluruhan pendulum
ke setiap pendulum. Dari energi kinetik dan energi potensial dapat digunakan untuk menghitung Lagrangian,
L = T – V (2.10)
Untuk kasus gerak sistem triple pendulum dengan subsitusi persamaan 2.2, 2.4, dan 2.6, ke persamaan 2.9, diperoleh energi potensialnya
= m1g (l1 + l2 + l3– l1cos θ1) + m2g (l1 + l2 + l3– l1 cos θ1– l2cos θ2) + m3g (l1 + dengan menggunakan persamaan 2.15 kedalam persamaan 2.12 diperoleh
T = 1
Persamaan 2.17 merupakan Lagrangian gerak triple pendulum, dimana persamaan tersebut akan diselesaikan dengan persamaan Lagrange agar diperoleh posisi masing-masing pendulum.
2.4 Persamaan Lagrange
Karena kasus yang dibahas merupakan sistem triple pendulum yang memiliki tiga pendulum maka ditinjau masing-masing posisi (Spiegel,1967). Persaman gerak untuk θ1 adalah
(𝑚1+ 𝑚2 + 𝑚3)𝑙1 𝜃̈1+ (𝑚2+ 𝑚3)𝑙2 𝑐𝑜𝑠(𝜃1− 𝜃2)𝜃̈2 + 𝑚3 𝑙3 𝑐𝑜𝑠(𝜃1−
𝜃3)𝜃̈3+ (𝑚2+ 𝑚3)𝑙2 𝜃̇22𝑠𝑖𝑛(𝜃1 − 𝜃2) + 𝑚3𝑙3 𝜃̇32𝑠𝑖𝑛(𝜃1− 𝜃3) + (𝑚1+ 𝑚2+
𝑚3)𝑔 𝑠𝑖𝑛𝜃1 = 0 (2.19)
Sedangkan untuk 𝜃2:
(𝑚2+ 𝑚3) 𝑙1 𝑐𝑜𝑠(𝜃1− 𝜃2) 𝜃̈1+ (𝑚2+ 𝑚3)𝑙2 𝜃̈2+ 𝑚3 𝑙3 𝑐𝑜𝑠(𝜃2− 𝜃3)𝜃̈3 −
(𝑚2+ 𝑚3)𝑙1𝜃̇12𝑠𝑖𝑛(𝜃1− 𝜃2) + 𝑚3𝑙3 𝜃̇32𝑠𝑖𝑛(𝜃2 − 𝜃3) + (𝑚2+ 𝑚3)𝑔 𝑠𝑖𝑛𝜃2 =
0 (2.20)
Lalu yang terakhir untuk 𝜃3:
𝑚3 𝑙1 𝑐𝑜𝑠(𝜃1− 𝜃3)𝜃̈1+ 𝑚3 𝑙2𝑐𝑜𝑠(𝜃2 − 𝜃3) 𝜃̈2 + 𝑚3𝑙3 𝜃̈3 − 𝑚3𝑙1𝜃̇12𝑠𝑖𝑛(𝜃1−
𝜃3) − 𝑚3𝑙2𝜃̇22𝑠𝑖𝑛(𝜃2− 𝜃3) + 𝑚3𝑔 𝑠𝑖𝑛𝜃3 = 0 (2.21) Persamaan 2.19, 2.20, dan 2.21 merupakan persamaan gerak sistem triple
pendulum nonlinier. Dimana m1, m2, dan m3 merupakan massa masing-masing
pendulum1, pendulum2 dan pendulum3, dan l1,l2 dan l3 merupakan panjang tali
dari masing-masing pendulum, dan 𝜃1, 𝜃2, dan 𝜃3 adalah sudut yang dibentuk pendulum dengan garis vertikal serta g merupakan konstanta gravitasi bumi. Sistem seperti ini banyak digunakan untuk mengetahui kejadian akan datang, misalnya perkiraan cuaca, perkiraan gempa dan lain sebagainya.
2.5 Pemrograman dengan Mathematica 9
Mathematica merupakan perangkat lunak yang diproduksi dan dikembangkan oleh Wolfram Research, Inc. Pendiri perusahaan tersebut adalah Stephen Wolfram, Ph.D. Beliau adalah fisikawan di bidang fisika teoritis dan berkebangsaan Inggris. Mathematica dapat digunakan untuk aplikasi matematika, ilmu pengetahuan, biologi, teknologi, bisnis, dan aplikasinya.
Pada penelitian ini, program lebih banyak dibuat dengan menggunakan perintah-perintah berikut ini
Sintaks umumnya: Graphics[primitives, options]
2. Manipulate: perintah untuk memanipulasi secara interaktif ekspresi-ekspresi program, grafik dan objek lainnya.
sintaks umumnya: Manipulate[expr,{u,umin,umax}].
3. Module: perintah untuk membuat variabel local dengan nama tertentu yang dapat dipanggil.
Sintaks umumnya: Module[{x,y,….}, expr]
4. NDSolve: perintah untuk menyelesaikan persamaan differensial karena tidak semua penyelesaian persamaan differensial bisa diselesaikan secara analitik seperti dinamika triple pendulum.
Sintaks umumnya: NDSolve[eqns, y, {x, xmin, xmax}]
5. Parametric Plot: perintah untuk menampilkan x dan y koordinat fx dan fy
yang fungsinya adalah parameter waktu (t).
Sintaks umumnya: ParameterPlot[{fx, fy}, {t, tmin¸ tmax}]