e
LAPORAN RESMI PRAKTIKUM AKUSTIK DAN GETARAN – P3 GETARAN TEREDAM
Disusun oleh : Gilang Eka Saputra
(2411 100 020) Gigis Kintan M
(2411 100 036) Almas Fachrullah
(2411 100 076) Elfayasa Prikafais
(2411 100 083) Damas Panji H
(2411 100 098) Hana Septiyani Putri
(2411 100 109) Harish Adiyat
(2411 100 112) Rehan Rachmanda
(2411 100 123)
Asisten : Syamsul Hadi
(2410 100 105)
PROGRAM STUDI S1 TEKNIK FISIKA JURUSAN TEKNIK FISIKA
FAKULTAS TEKNOLOGI INDUSTRI
INSTITUT TEKNOLOGI SEPULUH NOPEMBER SURABAYA
2013
LAPORAN RESMI PRAKTIKUM AKUSTIK DAN GETARAN – P3 GETARAN TEREDAM
Disusun oleh : Gilang Eka Saputra
(2411 100 020) Gigis Kintan M
(2411 100 036) Almas Fachrullah
(2411 100 076) Elfayasa Prikafais
(2411 100 083) Damas Panji H
(2411 100 098) Hana Septiyani Putri
(2411 100 109) Harish Adiyat
(2411 100 112)
PROGRAM STUDI S1 TEKNIK FISIKA JURUSAN TEKNIK FISIKA
Percobaan ini bertujuan menentukan konstanta redaman pada suatu sistem pegas, serta menentukan jenis peredaman pada suatu sistem pegas. Data yang digunakan adalah data yang diambil dari DAQ (data acquisition) pada komputer. Data diambil dari percobaan yang menggunakan pegas 1 dengan 1 damper, pegas 1 dengan 2 damper, dan pegas 2 dengan 2 damper. Data yang didapat diolah menggunakan software matlab. Hasil percobaan dianalisa dan dapat diketahui bahwa pegas 1 dengan 1 damper, pegas 1 dengan 2 damper, dan pegas 2 dengan 2 damper adalah
jenis redaman under damped. Serta nilai c, yaitu 3,1694; 4,8297; dan 4,7995..
Kata kunci: DAQ, redaman, pegas, damper.
ABSTRACT
This experiment aims to determine the damping constant of a spring system, as well as determine the kind of curbs on a spring system. Data the data used are drawn from the DAQ (data acquisition) on the computer. Data taken from the experiment that uses Spring 1 with 1 damper, damper spring 1 with 2, and 2-2 with spring damper. The Data obtained were processed using matlab software. Results of experiment analyzed and can be known that spring 1 with 1 damper, damper spring 1 with
2, and 2-2 with spring damper is a type of damping under damped. Where as value of c are 3,1694; 4,8297; and 4,7995.
Keywords: DAQ, damping, spring, damper
KATA PENGANTAR
Puji syukur kami panjatkan kehadirat Allah SWT yang telah memberikan rahmat serta karunia-Nya kepada kami sehingga kami berhasil menyelesaikan laporan resmi ini yang alhamdulillah tepat pada waktunya.
Juga dengan segenap rasa syukur, kami bisa menyelesaikan laporan resmi tentang praktikum getaran teredam ini yang kami ajukan sebagai tugas untuk melaksanakan kewajiban sebagai mahasiswa.
Harapan kami atas laporan resmi ini semoga bisa memberikan manfaat bagi kami khususnya sebagai praktikan sekaligus penyusun dan bagi pembaca pada umumnya. Ucapan terima kasih kami haturkan kepada seluruh pihak yang telah membantu dalam terselesaikanya makalah ini baik oleh dosen akustik dan getaran maupun asisten-asisten laboratorium rekayasa akustik dan fisika bangunan.
Kami menyadari bahwa laporan ini masih jauh dari sempurna, oleh karena itu kritik dan saran dari semua pihak yang bersifat membangun selalu kami harapkan demi kesempurnaan laporan ini.
Akhir kata, kami sampaikan terima kasih kepada semua pihak yang telah berperan serta dalam penyusunan makalah ini dari awal sampai akhir. Semoga Allah SWT senantiasa meridhai segala usaha kita. Amin.
Surabaya, 1 Mei 2013
Penyusun
DAFTAR ISI
DAFTAR GAMBAR
Gambar 4.1 Grafik pegas 1 dengan damper 1...10 Gambar 4.2 Grafik pegas 1 dengan damper 2...10 Gambar 4.3 Grafik pegas 2 dengan damper 2...11
DAFTAR TABEL
Tabel 4.1 Tabel Rasio Redamana dan Kategori Redaman...9
BAB I itu terjadi tapi tidak mengetahui kenapa bisa seperti itu, reaksi apa yang terjadi, dan apa manfaatnya dalam hidup ini. Maka dari itu untuk mengetahui lebih jelasnya kita lakukan sebuah praktukum tentang getaran teredam pegas ini.
1.2 Permasalahan
Permasalahan yang dibahas adalah :
1. Bagaimana menentukan konstanta redaman pada suatu sistem pegas?
2. Bagaimana menentukan jenis peredaman dalam suatu sistem pegas?
1.3 Tujuan Praktikum
Praktikum ini dilakukan dengan tujuan :
10
BAB II DASAR TEORI 2.1 Getaran Harmonik
Getaran harmonik adalah gerakan bolak-balik melalui titik setimbang secara periodik. Gerak bolak-balik dikarenakan adanya gaya pemulih dari suatu benda yang arahnya menuju titik setimbang yang besarnya sebanding dengan simpangan. Gaya pemulih arahnya selalu berlawanan dengan arah simpangan, maka dituliskan dalam persamaan sebagai berikut:
F=−k ∆ x ...(1) Dimana :
K = konstanta gaya (N/m) ∆ x = simpangan (m) F = gaya pemulih (N)
Pada kondisi nyata, gaya pemulih semakin lama semakin melemah karena adanya gaya gesek yang juga mendisipasikan energi. Gaya gesek akan mengakibatkan amplitudo setiap osilasi secara pelan menurun terhadap waktu. Sehingga osilasi akan berhenti sama sekaili. Getaran semacam ini disebut sebagai getaran selaras teredam.
2.2 Getaran Teredam
Getaran yang terdapat gaya penghambat atau gaya gesekan yang pada akhirnya getaran itu akan berhenti. Gaya penghambat ini dikenal dengan gaya redam. Gaya redam merupakan fungsi linier dari kecepatan, Fd=−cdx
dt .
Jika suatu partikel bermasa m bergerak di bawah pengaruh gaya pemulih linier dan gaya hambat, maka persamaannya menjadi:
m´x+c´x+kx=0 ...(2)
Persamaan umum sistem dinamik orde 2: ´
Jika persamaan (2) dibandingkan dengan persamaan
(3), maka didapatkan 2ξ ω0´x=
Nilai rasio redaman dapat dihitung dengan persamaan berikut:
ξ=
√
δ2
4π2
+δ2 ...(4)
12
n: bilangan bulat untuk menyatakan urutan amplitudo satu gelombang (1,2,3) A: Amplitudo (m)
a) Getarang Kurang Redam (under-damped)
Untuk getaran kurang redam didefinisikan sebagai getaran yang memiliki loss kecil dengan respon osilasi dengan peluruhan logaritmik. Jika 0 ≤ ξ <1 dan frekuensi getaran teredam ditulis dengan persamaan:
ωd=ωo
√
1−ξ2Dimana: ωd : Frekuensi getaran teredam
Jika redaman kecil maka frekuensi tersebut akan mendekati frekuensi asli artinya gerak partikel tersebut bergerak harmonik.
b) Getaran Redaman Kritis (critically-damped)
Untuk suatu getaran redam kritis akan mendekati kesetimbangan dengan suatu laju yang lebih cepat daripada gerak terlampau redam maupun gerak kurang redam. Getaran redaman kritis akan terjadi jika rasio redamannya sama dengan satu.( ξ =1). Sifat ini penting guna suatu sistem ayunan praktis.
c) Getaran Terlampau Redam (over-damped)
BAB III
METODOLOGI PRATIKUM 3.1 Peralatan Praktikum
Peralatan yang diperlukan untuk melakukan praktikum ini adalah sebagai berikut :
1. Statif 1 buah 2. Pegas 2 buah 3. Damper 2 buah 4. Beban 1 buah (1 kg) 5. Accelerometer
6. Seperangkat DAQ (Data Acquisition)+Laptop
3.2 Prosedur Praktikum
Berikut adalah tahapan – tahapan yang dilakukan sesuai dengan praktikum yang dilakukan:
1. Nilai konstanta pegas dicari dengan memasang statif dan diberi beban lalu diukur pertambahan panjang pegasnya lalu dihitung dengan persamaan (1).
2. Alat dan bahan disiapkan lalu disusun seperti pada skema susunan alat.
3. Beban disimpangkan lurus ke bawah sejauh 5 cm dan ditahan jangan di lepas.
4. Software DAQ di run pada laptop.
5. Beban dilepaskan pelan pelan dan ditunggu sampai getaran berhenti.
6. Damper diubah lalu dilakukan langkah 1-5 lagi. 7. Pegas ditambah secara paralel, lalu dilakukan
langkah 1-6 masing masing minimal 3 kali.
8. Grafik di plot lalu konstanta redaman dihitung menggunakan persamaan (4) dan (5) untuk n=1,2, dan 3. Data dimasukkan dalam tabel.
BAB IV
ANALISIS DATA DAN PEMBAHASAN 4.1 Analisis Data
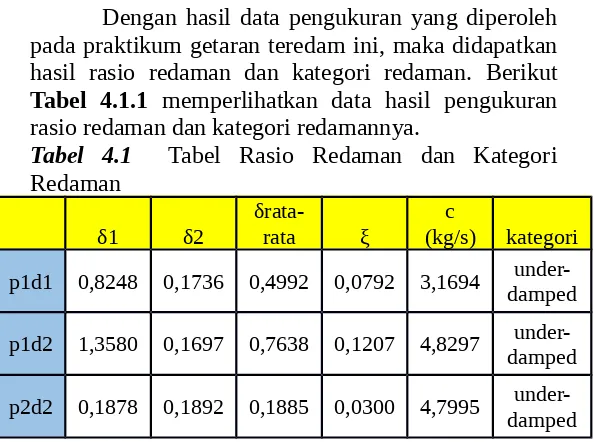
Dengan hasil data pengukuran yang diperoleh pada praktikum getaran teredam ini, maka didapatkan hasil rasio redaman dan kategori redaman. Berikut Tabel 4.1.1 memperlihatkan data hasil pengukuran rasio redaman dan kategori redamannya.
Tabel 4.1 Tabel Rasio Redaman dan Kategori
p1d1 0,8248 0,1736 0,4992 0,0792 3,1694 under-damped
p1d2 1,3580 0,1697 0,7638 0,1207 4,8297 under-damped
p2d2 0,1878 0,1892 0,1885 0,0300 4,7995 under-damped
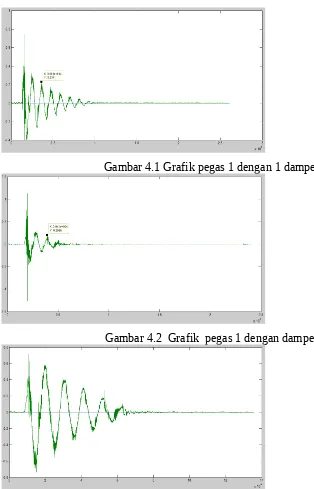
Berdasarkan data yang telah diambil pada DAQ, lalu diolah melalui software Matlab, didapatkan :
17
Gambar 4.1 Grafik pegas 1 dengan 1 damper 1
Gambar 4.2 Grafik pegas 1 dengan damper 2
Gambar 4.3 Grafik pegas 2 dengan damper 2
2.2 Pembahasan
18
Pada percobaan tentang getaran teredam ini, didapatkan bahwa dalam percobaan dengan sistem satu pegas 1 buah damper,nilai damping ratio, ξ = 0,079234201 dengan peluruhan logaritmik (δ) sebesar 0,499160128. Pada sistem ini, getaran dikategorikan sebagai getaran under-damped. Begitu pula dengan sistem pegas satu dengan dua damper didapatkan bahwa nilai damping ratio, ξ = 0,120742003dengan peluruhan logaritmik (δ) sebesar 0,763848154. Pada sistem ini, getaran dikategorikan sebagai getaran under-damped. Pada percobaan sistem pegas kedua dengan mengunakan dua damper, nilai damping ratio, ξ = 0,029996567dengan peluruhan logaritmik (δ) sebesar 0,499160128. Sehingga, dapat ditarik kesimpulan bahwa semakin banyak damper yang digunakan, maka peluruhan logaritmik akan semakin besar.
GIGIS KINTAN M. 2411100036
Pada pratikum P3 Getaran yang Teredam dari tabel 4.1 didapatkan data c pada tiap keadaan. Keadaan tersebut yaitu dumper 0 pegas 1, dumper 1 pegas 0, dan dumper 2 pegas 1.Pada data pratikum ada ketidaklengkapan data dikarenakan kerusakan dumper 2.
Dari hasil pratikum dapat dilihat bahwa nilai c, yaitu 3,1694; 4,8297; dan 4,7995. Nilai c terbesar yaitu 4,8297. Nilai c semuanya di atas 3.
Dari nilai ξ dapat dilihat bahwa jenis getarannya yaitu getaran kurang redam. Karena didapatkan nilai ξ, yaitu 0,0792; 0,1207; dan 0,0300. Nilai ξ yang terbesar yaitu 0,1207. Nilai ξ besarnya kurang dari 1. Nilai ξ terbesar pada saat tanpa adanya dumper.
Nilai c dan ξ tergantung pada viskositas dari fluida di dalam damper. Semakin besar nilai viskositas bahan semakin besar konstanta redamannya. Selain itu juga dari nilai konstanta dari pegas. Nilai viskositas dan konstanta pegas ini dapat berubah terhadap waktu penggunannya sehingga nilainya berkurang Dalam pratikum ini kesalahan data yang didapat dalam pratikum dapat terjadi karena kesalahan dalam perekaman data oleh software, yaitu penentuan awal dan akhir dalam perekaman. Hal ini menyebabkan penyimpangan data. Selain itu, kesalahan dalam menyimpangkan pegas juga berpengaruh dalam kesalahan data swehingga data yang didapatkan menjadi tidak valid.
Almas F 2411100076
Pada praktikum P3 tentang Getaran Teredam, terdapat 2 tujuan variabel yang akan dicari yaitu konstanta redaman dan Rasio Redaman. Dari data yang didapat seharusnya terdapat 6 jenis data namun kelompok kami hanya mendapat 4 data yaitu Getaran Pegas 1 Damper 1, Getaran Pegas 1 Damper 2 ,Getaran Pegas 1 Tanpa Damper dan Getaran Pegas 2 Damper 2. Hal ini dikarenakan saat akan digunakan untuk pegas 2 terjadi kerusakanpada damper 1.
19
kecil daripada simpangan terjauh pada damper 1(0,8 cm). Serta waktu yang dibutuhkan untuk steady pada damper2 lebih cepat daripada damper 1.
Kendala pada praktikum kali ini adalah adanya ketidak lurusan saat benda disimpangkan sehingga menyebabkan gaya gesek pada damper dan mempengaruhi ke hasil grafik yang ada. Serta adanya ketidak tepatan penghitungan simpangan saat benda disimpangkan karena hanya menggunakan penggaris biasa.
Elfayasa Prikafais 2411100083
Percobaan dilakuakan dengan menggunakan 3 jenis kondisi, kondisi pertama Pegas 1 dengan Damper 2, kondisi kedua Pegas 1 dengan Damper 2 dan kondisi ketiga Pegas 2 damper 1. Dari data yang didapatkan dari DAQ dan diolah dengan software matlab maka didapatkan bahwa , kondisi pertama Pegas 1 dengan Damper 2 mempunyai ξ 0,079234201 sehingga dapat disimpulkan sesuai dengan teori bahwa berkatagori under damped, kondisi kedua Pegas 1 dengan Damper 2 mempunyai ξ 0,120742003 sehingga dapat disimpulkan sesuai dengan teori bahwa berkatagori under damped dan kondisi ketiga Pegas 2 damper 1 mempunyai ξ 0,029996567 sehingga dapat disimpulkan sesuai dengan teori bahwa berkatagori under damped. Untuk lebih mudah dalam mengetahui katergori suatu redaman tersebut dapat pula dilihat dari grafik. Dari ketiga grafik terlihat bahwa ketiga kategori berjenis under-dumped. Kondisi Pegas 2 damper 2 sengaja tidak diolah karena data tidak didapatkan. Hal itu disebabkan karena adanya kerusakan pada damper 2
Damas Panji H 2411100098
Pada praktikum ini dilakukan 3 kali percobaan pada pegas 1 dengan damper 1, pegas 1 dengan damper 2 dan pegas 2 dengan damper 1. Damper 1 menggunakan oli sebagai media fluida dan damper 2 menggunakan minyak sebagai media fluida. Berat yang dipakai sebagai massa yakni 1 kilogram. Berdasarkan analisa data, didapati nilai E maksimal yakni 0,211 dan E minimum 0,029. Dari praktikum ini didapat bahwa ketiga percobaan tadi didapati bahwa hasil ketiga jenis redaman yakni under damp atau kurang redam. Karena asisten tidak memberi nilai konstanta pegas maka kami menggunakan matlab dengan menganalisa hasil gelombang yang berasal dari getaran massa yang dihubungkan dengan accelerometer dan seperangkat data acquisition. Dari nilai Konstanta pegas ini maka kita mengambil cara untuk mencari nilai c.
Hana Septiyani Putri 2411100109
20
damping ratio = 0,079234201 dan jenisnya adalah under damped.Pada sistem 1 pegas dengan 2 damper didapatkan damping ratio = 0,120742003 dan jenisnya adalah under damped.Pada sistem 2 pegas dengan 2 damper didapatkan damping ratio = 0,029996567 dan jenisnya adalah under damped. Semakin banyak damper maka damping ratio juga akan besar nilainya.
Harish Adiyat 2411100112
Pada Praktikum Akustik dan Vibrasi modul 3 mengenai Getaran Teredam, terdapat 2 variabel dicari pada praktikum kali ini yaitu konstanta redaman dan Rasio Redaman. Sesuai dengan ketentuan modul adalah 6 jenis data yang akan diambil tetapi pada praktikum ini hanya 4 data yang diambil. Karena damper dengan fluida oli mengalami kerusakan. Dan yang diambil yaitu Getaran Pegas 1 Damper 1, Getaran Pegas 1 Damper 2,Getaran Pegas 1 Tanpa Damper dan Getaran Pegas 2 Damper 2.
Dari data teramati bahwa untuk data yang menggunakanPegas 1 terukur bahwa rasio redaman berurutan dari yang terbesar ke yang terkecil adalah damper 2, damper 1 dan tanpa damper. Dapat diketahui bahwa konstanta redaman pada damper 2 lebih besar dari pada damper 1. Sehingga terjadi amplitudo (<0,8 cm) pada damper 2 lebih kecil daripada amplitudo pada damper 1 (0,8 cm). Serta waktu yang dibutuhkan untuk mencapai steady state pada damper 2 lebih cepat daripada damper 1.
Beberapa kendala yang timbul saat praktikum ini adalah pengukuran amplitude menggunakan penggaris dengan ketelitian centimeter sehingga tingkat akurasi pengamatan terhadap pegas tidak tinggi dan saat pelepasan beban,beban tidak tepat dilepas pada absis dan ordinatnya sehingga grafik diawal tidak terlihat sempurna.
Rehan Rachmanda 2411100123
Pada praktikum ini bertujuanuntuk mengetahui efek peredaman pada pegas yang dihubungkan dengan tabung berisi fluida peredam. Percobaan dilakukan sebanyak 3 kali, yaitu pada pegas 1 dengan damper 1, pegas 1 dengan damper 2 dan pegas 2 dengan damper 1.
21
melakukan praktiku didapat kesimpulan bahwa ketiga percobaan tergolong jenis redaman under damp atau kurang redam.
BAB V PENUTUP 6.1 Kesimpulan
Dari hasil praktikum diatas, kami dapat menyimpulkan sebagai berikut:
1. Pada sistem 1 pegas dengan 1 damper didapatkan damping ratio = 0,079234201 dan jenisnya adalah under damped.
2. Pada sistem 1 pegas dengan 2 damper didapatkan damping ratio = 0,120742003 dan jenisnya adalah under damped
3. Pada sistem 2 pegas dengan 2 damper didapatkan damping ratio = 0,029996567 dan jenisnya adalah under damped.
6.2 Saran
24
DAFTAR PUSTAKA
Laboratorium Rekayasa Akustik dan Fisika Bangunan. 2013. Modul Pratikum Akustik dan Getaran S1 Getaran Teredam. Surabaya.
LAMPIRAN Gilang Eka Saputra
2411100020
SISTEM PEREDAM VIBRASI DAN SHOCK
SERTA PERPINDAHAN PANAS PADA
PAYLOAD ROKET
Pada jurnal ini, dibahas mengenai peredam vibrasi pada sistem payload roket, pada saat roket diluncurkan, motor roket mengalami getaran yang dapat mengganggu sistem yang lain. Maka, dilakukanlah analisis ini agar sistem pada payload roket tidak terganggu. Pada jurnal ini, penulis menawarkan solusi peredam mekanik roket dengan desain seperti dibawah ini :
Dengan kenaikan frekuensi, amplitudo sinyal yang diredam akan naik sampai pada frekuensi pribadi, kanaikan amplitudo mencapai maksimum. Di atas frekuensi pribadi, amplitudo sinyal yang teredam semakin turun. Di samping getaran mekanik yang dapat mengancam payload, perlu diantisipasi pula pengaruh kalori yang timbul dan mengakibatkan kenaikan suhu payload.Kenaikan suhu ini ditimbulkan karena energy listrik dari catu daya instrumen berubah menjadi energikalor sehingga menimbulkan kenaikan suhu. Bisa terjadi pula perpindahan panas dari luar atau permukaan roket menuju payload. Kenaikan suhu permukaan roket dapat terjadi karena adanya gesekan udara dengan permukaan roket, khususnya pada kecepatan supersonic.
Gigis Kintan M 2411100036
A NEURAL NETWORK MODEL FOR ANALYZING VIBRATION WAVEFORM OF IMPACT SOUND
Kenji Hosoya, Takehiko Ogawa, Hajime Kanada and Kiyomi Mori
Metode untuk memperkirakan fitur material dengan dampak suara yang diinginkan dalam jurnal ini. Metode yang diusulkan ini untuk mendapatkan elastis modulus dan rasio pembuangan dari getaran, yaitu untuk merancang struktur komposit dengan mempertimbangkan karakteristik keramik. Untuk memperkirakan parameter bahan tersebut, maka perlu memodelkan getaran yang tepat.
Dalam karya sebelumnya, getaran dikaji dengan menggunakan Transformasi Fourier. Sementara itu, belakangan ini jaringan saraf tiruan telah digunakan untuk membuat model sumber sinyal. Jaringan syaraf multilayer dengan adaptasi model jaringan sumber sinyal dengan kesalahan backpropagation. Metode ini merupakan model baru jaringan saraf untuk analisis getaran material. Peneliti memeriksa model dengan gelombang getaran dengan bahan keramik komposit. Juga, gelombang tinggi di suhu dianalisis dari gelombang suara dampak suhu kamar.
Sehingga dari jurnal ini akan dapat ditarik kesimpulan bahwa karakteristik getaran tiap bahan berbeda. Maka dari data getaran dan jaringan saraf tiruan kita dapat mengetahui jenis bahan tersebut juga ke depannya.
Almas F 2411100076
REDAMAN GETARAN DARI LEMPENGAN KOMPOSIT MENGGUNAKAN ELEMEN PIEZOELECTRIC DAN RESISTOR PASIV
yang sederhana . frekuensi dan redaman didapat dari perhitungan eigenvalue pada layer tersebut. dan gaya getaran dapat diprediksi pula dengan perhitungan yang ada.
Hasil yang ditunjukan menunjukan bahwa ada resistansi yang optimal yang menambahkan nilai redaman. Dan lama kelamaan redaman tersebut bernilai nol. Selain itu pula dengan nilai resitansi yang optimal tersebut dihasilkan nilai pergeseran frekuensi ke lebih tinggi. Dari perhitungan nilai frekeunsi tersebut dapat diartikan bahwa untuk mengatur vibrasi dengan mengatur resistansi pada rangkaian hambatan pada lapisan itu.
Damas Panji H 2411100083
DESIGN OF AN ANTI-LOCK REGENERATIVE BRAKING SYSTEM FOR A SERIES HYBRID ELECTRIC VEHICLE
Untuk melakukan sistem pengereman atau redaman dalam gaya berjalan maka harus diketahui terlebih dahulu titik berat dari benda tersebut dan jenis benda tersebut. Dalam transportasi yang mengandalkan hybrit system biasanya membutuhkan energy yang lebih sedikit daripada energi pada transportasi seperti umumnya. Di kebanyakan kota besar biasanya memiliki 80 % luas jalannya terdiri dari persimpangan sehingga dibutuhkan pengereman yang efektif dan jauh dari kata-kata rem blong.
Slip rasio didefinisikan ketika dia dipengaruhi kecepatan pembawa dan kecepatan anguler serta radius dari roda. Di rem dengan pedal angle 6 degrees, controller ditambah dengan regenerasi braking torsi linier dengan angle pedal rem. Dalam jurnal ini juga ditambah dengan beebrapa kali percobaan atau test. Test yang dilakukan yakni di jalan bersalju dan jalan beraspal. Hal ini ditujukan untuk mengerti jumlah daya rem dan jarak pengereman yang efektif agar tidak mengalami slip rotasi.
Elfayasa Prikafais 2411100083
Dalam jurnal ini dibahas mengenai penelitian terbaru yang berkaitan tentang penggunaan unsur-unsur shunted piezoelektrik untuk getaran redaman dan kontrol. Secara khusus, dalam jurnal ini berisi tentang ringkasan tentang redaman piezoelektrik shunt dan membahas pengamatan pada sifat redaman piezoelektrik shunt pada sistem umpan balik .
Pada penelitian yang dilakukan pada beberapa dekade terakhir tentang pengunaan transduser piezoelektrik, telah banyak ditemukan permasalahan tentang sistem kontrol getaran. Di permasalahan sistem kontrol getaran, transduser digunakan sebagai aktuator dan sensor di umpan balik kontrol loop yang dirancang untuk menekan getaran yang berstruktur fleksibel. Dalam aplikasinya pada kontrol getaran, piezolektrik mengubah dari energi getaran menjadi energi listrik. Bahan-bahan piezoelektrik dalam penggunaan saat ini mencakup polyvinylidene fluorida (PVDF), zir conate titanate (PZT).
Struktur umpan balik sangat mirip dengan umpan balik controller dengan sepasang collocated, dan identik, piezoelektrik transduser. Pengamatan ini memungkinkan seseorang untuk menggunakan desain standar control sistem alat untuk merancang shunt impedances.
Hana Septiyani Putri 2411100109
PEREDAMAN OSILASI GETARAN PADA SUATU SISTEM DENGAN PEMODELAN PEGAS-DAMPER MENGGUNAKAN KENDALI LOGIKA
FUZZY
Nazrul Effendy, Singgih I Kurniawan, Intan Putri K dan Nor Agny Susetyo Utami
Jurusan Teknik Fisika, Fakultas Teknik, Universitas Gadjah Mada Jl. Grafika No.2, Yogyakarta 55281
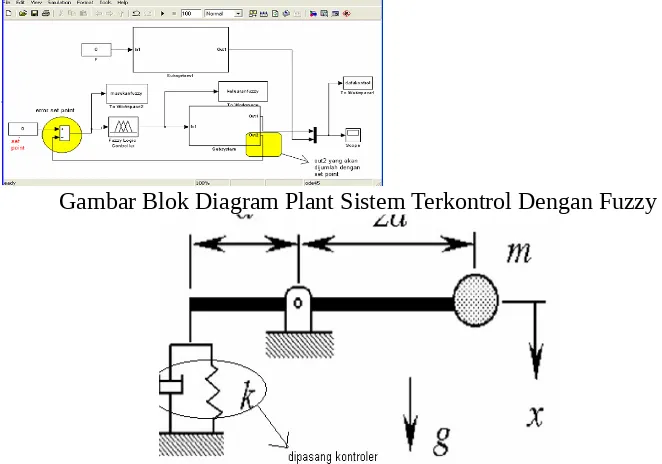
Pada jurnal ini menjelaskan Sistem mekanik yang bekerja sering kali menimbulkan suatu permasalahan yang sulit dihindari yaitu getaran yang berlebihan. Getaran ini apabila tidak diantisipasi maka akan menyebabkan kegagalan fungsi pada mesin, perasaan tidak nyaman pada penumpang (dalam sistem suspensi) dan suara yang mengganggu yang timbul dari sistem tersebut. Oleh karena itu, pemodelan suatu sistem mekanik diperlukan untuk mengetahui karakteristik dari sistem itu sendiri. Karakteristik sistem merupakan kata kunci yang ampuh bagi kita untuk memberikan solusi dalam meredam getaran sistem yang berlebihan. Kendali getaran pada sistem dengan pegas dan damper sederhana belum banyak dilakukan. Kendali ini penting agar sistem berjalan sesuai kriteria desain ideal instrumen dan menghemat biaya yang harus dikeluarkan untuk perawatan dan perbaikan sistem yang mengalami getaran berlebihan. Teknik algoritma yang diimplementasikan ke dalam pengendali adalah algoritma logika fuzzy. Algoritma ini cukup sederhana namun terbukti cukup baik dalam meredam getaran berlebihan dibandingkan dengan pengendali PID.
Gambar Blok Diagram Plant Sistem Terkontrol Dengan Fuzzy
Gambar Pemodelan Sistem pegas-damper dengan pengontrol
Pada jurnal ini disimpulkan bahwa kondisi respon dari plant yang telah diberi kontroler hasilnya lebih baik. Kontroler pada plant ini cocok untuk kondisi dinamis yang mendapatkan gaya yang berbeda-beda pada setiap keadaan yang berbeda namun tetap memiliki respon yang baik.
Harish Adiyat 2411100112
A CASE STUDY ON VIBRATION CONTROL IN A BORING BAR USING PARTICLE DAMPING
M. Senthil Kumar; K. M. Mohanasundaram; B. Sathishkumar
itu sendiri berbeda-beda.Berikut ini adalah table partikel damping beserta kerapatan daripartikel damping itusendiri.
Pada jurnal ini disebutkan bahwa pemanfaatan partikel damping mempengaruhi reduksi dari level vibrasi sebuah benda yang menghasilkan getaran.
Rehan Rachmanda 2411100123
MULTIVARIABLE CONTROL FOR DAMPING INTERAREA OSCILLATIONS IN POWER SYSTEMS
Juan J. Sanchez-Gasca, Nicholas W. Miller, Atsushi Kurita, and Susumu Horiuchi
Pada jurnal ini membahas mengenai aplikasi pengendali pada output multivariabel untuk meredam getaran pada pembangkit energi yang terdiri dari tiga generator. Multivariabel yang dikontrol berdasarkan analisa pada sinyal getaran dan koordinat pada saat pengukuran. Sebagaimana yang kita ketahui pada saat beroperasi mesin pembangkit energi akan menimbulkan getaran yang dapat menimbulkan ketidaknyamanan dan dapat berakibat buruk terhadap mesin itu sendiri (dapat menyebabkan kecacatan bila terjadi terus menerus dalam jangka waktu yang lama). Atas dasar permasalahan di atas tujuan dari penelitian ini adalah untuk mengurangi efek getaran tersebut sehingga lebih nyaman dan aman bagi lingkungan sekitar. Metode pengendalian dilakukan melalui dua cara: pertama dengan cara memberikan peredam yang memiliki koefisien peredaman yang baik pada titik tertentu, yang kedua dengan cara menempatkan media penyalur getar di sekitar kerangka mesin. Hasil pengukuran menunjukkan perubahan keadaan getaran sebelum dan setelah diberi perlakuan peredaman getaran. Berikut ini adalah grafik hasil pengurangan getaran akibat redaman.