Metode Deret Untuk Pergerakan Objek
Berbasis Teknologi iBeacon
Yusuf Eko Rohmadi 1, Taman Ginting2 1&2
Politeknik Pratama Mulia Surakarta 1[email protected]
A B S T R A C T
Wireless technology that has a short range and a well used in a closed environment one is Bluetooth. development of the use of Bluetooth may be applied to a service-based services, such as positioning the object (positioning) or determining the location of the object (localization). Based on the received signal strength will be known distance, so that trace the movement of objects / items will be known. Through the principles contained in TrackR, so in this study used iBeacon technology for the purpose of tracking the movement of objects. iBeacon will issue a signal strength (RSSI) to be received by the smartphone. Methods used test of using Array (Array) with algorithms matrix (multi dimensional array). Utilization of bluetooth technology is packaged in iBeacon not give good accuracy on object tracking. One factor is iBeacon BLE technology is so powerful signal issued not so strong, short-range and easily influenced their excellent interference signal interference and obstacles. However, increasing the number of sensors (iBeacon) can give better accuracy approaches, and methods of sequence (array) is a suitable method used for object tracking
Keywords: iBeacon, positioning, object tracking, bluetooth.
I.
PENDAHULUAN
Dalam sistem pencarian maupun pelacakan secara mobile serta, pengukuran jarak menjadi kebutuhan
utama
untuk mengetahui keberadaan objek. Dalam perkembangan context location sangat banyak metode yang telah dikembangkan untuk mengetahui jarak terhadap objek. Perkembangan metode ini dikembangan untuk perangkat mobile berbasis navigasi location. Pasilitas yang berbasiswireless seperti Bluetooth, kebanyakan fitur
Bluetooth digunakan hanya untuk keperluan transfer data antar device seperti handphone atau laptop. Sedangkan Bluetooth dapat dimanfaatkan untuk keperluan yang lebih dari sekedar sebagai media transfer data seperti untuk keperluan layanan berbasis service, contohnya adalah positioning atau localization. Positioning berarti menentukan posisi suatu
objek berdasarkan referensi objek lain atau berdasar pada konteks tertentu (context-aware).
Layanan
berbasis context-aware berarti sebuah sistem komputerisasi yang menyediakan layanan dan informasi yang relevan kepada pengguna sesuai dengan kondisi atau kebutuhan mereka [1]. Positioning merupakan bentuk layanan berbasis context-aware, salah satu contoh penerapannya yang terdapat pada perangkat mobile adalah GPS (GlobalPositioning System). GPS adalah sistem
navigasi yang digunakan untuk mencari estimasi posisi suatu objek dalam bentuk informasi koordinat lintang dan bujur [2]. Informasi yang diambil dari layanan GPS tersebut mampu memberikan akurasi yang baik jika diterapkan pada lingkungan terbuka, sedangkan dalam lingkungan yang tertutup
(indoor) GPS akan memberikan informasi yang
Kaitannya dengan positioning terdapat beberapa teknologi selain GPS sebagai pengganti saat diimplementasikan pada lingkungan tertutup yaitu Bluetooth, WLAN, RFID dan ZigBee [4]. Menurut [5], keempat teknologi tersebut RFID tidak termasuk di dalamnya, sedangkan WLAN termasuk dalam kategori Wi-Fi dan teknologi yang lain adalah UWB. Diantara Wi-Fi, Bluetooth, Zigbee dan UWB yang mempunyai range atau jangkauan terluas adalah Wi-Fi.
BLE dalam istilah lain Bluetooth Smart adalah Bluetooth yang dalam kinerjanya membutuhkan daya yang rendah. Perusahaan besar Apple mengembangkan sebuah teknologi berbasis BLE dengan nama iBeacon. iBeacon adalah sebuah modul atau perangkat keras yang memancarkan sinyal informasi berupa Tx Power (kuat daya yang dipancarkan), RSSI (Received Signal Strenght Indicator) dan distance (jarak). Parameter-parameter ini akan bisa ditangkap dan dibaca oleh perangkat mobile yang di dalamnya tertanam Bluetooth versi 4. Jika perangkat mobile adalah produk Apple maka iOS terinstal versi 7 ke atas, dan jika Android maka sistem operasi (OS) terinstal minimal Jelly Bean 4,3. Fungsi utama dari iBeacon digunakan dalam layanan berbasis lokasi (location service). Hal tersebut hanya menjelaskan posisi relatif objek/pengguna terhadap iBeacon, yaitu posisi sangat dekat, dekat atau jauh dan tidak menjelaskan posisi secara fisik mengenai letak lintang dan bujur seperti pada GPS. Sehingga pada penelitian ini terapan teknologi Bluetooth yaitu Bluetooth Low Energy yang telah dikemas dalam sebuah modul iBeacon akan dikembangkan sebagai penentu lokasi objek dalam ruang tertutup berdasarkan peta lokasi tertentu yang hasil akhirnya berupa posisi dalam bentuk koordinat.
II.
TINJAUAN PUSTAKA
Object tracking atau penentuan pergerakan
objek adalah bagaimana cara mengetahui atau pergerakan suatu objek. Dasar utama dalam
object tracking ini adalah teknik penentuan
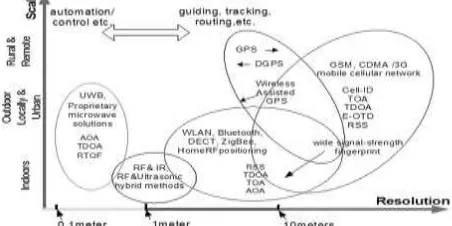
posisi suatu objek (positioning). Beberapa teknologi dan metode yang dapat digunakan dalam penentuan posisi dan penentuan pergerakan objek ditunjukkan pada Gambar 1. RSSI dan distance merupakan parameter penting pad positioning dan object tracking.
Gambar 1. Klasifikasi Teknologi dan Metode Positioning
2.1 Radio Propagasi
Model radio propagasi merupakan cara untuk mendapatkan distance (d) dari pengukuran RSSI dan Tx power level.
PRx = daya yang diterima oleh receiver dalam dB
PTx = daya yang dipancarkan oleh transmitter dalam dB
GT = penguatan antena transmitter dalam dBi
GR = penguatan antena receiver dalam dBi
d = jarak atau distance dalam meter (m) c = kecepatan cahaya 3x10¬8 m/s f = frekuensi 2,44 GHz
n = faktor rintangan (n = 1,5 untuk free space)
2.2 Array Multidimensi
Gambar 2. Struktur Matrik (Array Multidimensi)
Gambar 3. Representasi array matrik 2 dimensi
2.3 Triangulasi dan Trilaterasi
Triangulasi merupakan metode untuk menentukan posisi objek yang didasarkan pada
distance antara transmitter dengan receiver [6]
menggunakan pendekatan geometri atau pengukuran sudut. Sedangkan trilaterasi menggunakan pendekatan secara trigonometri yang medasarkan pada pengukuran RSSI [7]. Dalam metode trilaterasi titik referensi atau
transmitter sudah ditentukan sebelumnya dalam
koordinat x dan y dengan jumlah minimal 3 titik referensi, sedangkan pada triangulasi bisa hanya menggunakan 2 titik referensi.
Gambar 4. Estimasi Posisi 2-D dengan Trilaterasi Berdasar Gambar 4 maka dapat dicari
disatance masing-masing sensor terhadap objek
M, yaitu:
dan koordinat titik M yang menjadi posisinya terhadap 3 sensor adalah:
III.
METODOLOGI PENELITIAN
3.1 Lokasi Penelitian dan Penempatan Sensor
Lokasi yang digunakan adalah ruang tertutup (indoor) dengan sedikit halangan. Luas ruangan yang digunakan adalah ± 9,7 x 5,81 m2. Di dalam ruangan tersebut ditempatkan 3 sensor iBeacon, seperti pada Gambar 5.
1.1 Gambar 5. Penempatan 3 Sensor
3.2 Penerapan Metode Array
Hasil positioning pada 4 model dengan menggunakan Trilaterasi kemudian digunakan pada metode Array untuk mengetahui jejak atau pergerakan dari objek (smartphone). Namun tidak semua hasil dari 4 model digunakan dalam metode Array, hanya model yang menunjukkan hasil terbaik saja yang dijadikan pedoman.
IV.
HASIL DAN PEMBAHASAN
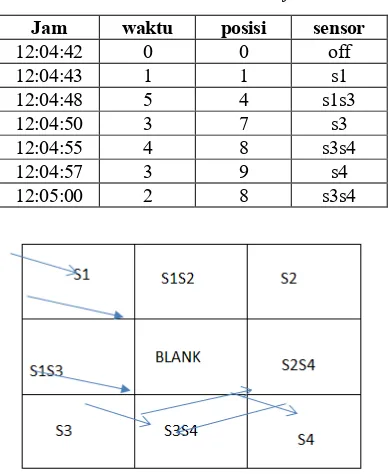
Pada hasil penelitian dengan model dan metode sebelumya digunakan menjadi perbandingan untuk metode array agar bias diketahui hasil yang lebih baik. Hasil pada model dan metode ini kemudian digunakan sebagai data pengolahan dengan menggunakan metode Array.Pada penerapannya untuk mendapatkan rekaman pergerakan objek yang lebih baik atau mendekati akurat, perlu ditambahkan 1 sensor. Hasil yang ditunjukkan pada metode Array diperlihatkan pada Tabel 1 dan Gambar 6 dan bentuk grafik pada Gambar 7.
Tabel 1. Waktu dan Posisi Objek
Jam waktu posisi sensor
12:04:42 0 0 off
12:04:43 1 1 s1
12:04:48 5 4 s1s3
12:04:50 3 7 s3
12:04:55 4 8 s3s4
12:04:57 3 9 s4
12:05:00 2 8 s3s4
Gambar 6. Arah pergerakan Objek
Gambar 7. Grafik Pergerakan Objek
V.
KESIMPULAN
5.1 KesimpulanKesimpulan yang diperoleh dari penelitian ini adalah:
a. Sistem penentuan sebelumnya tidak memberikan akurasi pergerakan objek karena sensor (iBeacon) bersifat sensitif terhadap pergerakan walaupun pada skala kecil.
b. Akurasi pergerakan meggunakan metode Array akan lebih baik jika terdapat banyak sensor yang terpasang dalam ruangan. c. Teknologi BLE yang membutuhkan
sumber daya (tegangan) yang kecil memberikan efek kepada kuat sinyal yang dikeluarkan, sehingga jangkauannya terbatas dan mudah terganggu oleh sinyal dan halangan fisik.
5.2 Saran
Saran-saran untuk pengembangan selanjutnya adalah:
a. Menambah titik dan jumlah referensi iBeacon untuk menambah akurasi dalam object tracking.
b. Menggunakan bluetooth yang memiliki kuat sinyal dan jangkauan yang lebih baik. c. Dalam penempatan sensor bluetooth perlu
REFERENSI
H. Chen, T. Finin, and A. Joshi, “An ontology for context-aware pervasive computing environments,” Knowl. Eng. Rev., vol. 18, no. 3, pp. 197–207, 2003.
Sheng-Cheng Yeh, Wu-Hsiao Hsu, Ming-Yang Su, Ching-Hui Chen, and Ko-Hung Liu, “A study on outdoor positioning technology using GPS and WiFi networks,” presented at the Networking, Sensing and Control, 2009. ICNSC ’09. International Conference on, 2009, pp. 597–601. G. Deak, K. Curran, and J. Condell, “A survey of
active and passive indoor localisation systems,” Comput. Commun., vol. 35, no. 16, pp. 1939–1954, 2012.
M. Rodríguez-Damián, X. Vila Sobrino, and L. Rodríguez-Liñares, “Indoor Tracking Persons Using Bluetooth: A Real Experiment with Different Fingerprinting-Based Algorithms,” in Ambient Intelligence - Software and Applications, vol. 219, A. van Berlo, K. Hallenborg, J. M. C. Rodríguez, D. I. Tapia, and P. Novais, Eds. Springer International Publishing, 2013, pp. 25–32.
Jin-Shyan Lee, Yu-Wei Su, and Chung-Chou Shen, “A Comparative Study of Wireless Protocols: Bluetooth, UWB, ZigBee, and Wi-Fi,” presented at the Industrial Electronics Society, 2007. IECON 2007. 33rd Annual Conference of the IEEE, 2007, pp. 46–51.
J. Yim, S. Jeong, K. Gwon, and J. Joo, “Improvement of Kalman filters for WLAN based indoor tracking,” Expert Syst. Appl., vol. 37, no. 1, pp. 426–433, Jan. 2010.
F. Subhan, H. Hasbullah, A. Rozyyev, and S. T. Bakhsh, “Indoor positioning in Bluetooth networks using fingerprinting and lateration approach,” presented at the