1
Optimalisasi Pengaturan Tegangan dengan Algoritma Genetika
Zainal Abidin11)
Dosen dpk pada Fakultas Teknik Prodi Elektro Universitas Islam Lamongan
Abstrak
Paper ini menyajikan penggunaan Algoritma Genetika untuk pengaturan optimalisasi tegangan pada sistem. Sistem ini digabungkan dengan metode Newton Rapshon pada kasus aliran daya untuk meminimalkan rugi-rugi daya. Walaupun beberapa metode kontrol tegangan dapat digunakan, teori ini difokuskan pada kapasitor bank (kapasitor shunt) sebagai parameter variabelnya. Metode ini diaplikasikan pada sistem 5 busbar dan sistem IEEE 14-busbar untuk melihat kemampuan dan kapabilitasnya.
Dari beberapa percobaan dapat dilihat bahwa pendekatan algoritma genetika berhasil membangkitkan nilai kapasitor shunt yang tepat yang akan ditempatkan pada tiap bus untuk menghasilkan rugi daya yang minimum dan sekaligus menghasilkan optimasi tegangan.
Kata Kunci : Optimalisasi, Tegangan, Algoritma Genetika
I. PENDAHULUAN
Dalam operasi sistem tenaga listrik, kestabilan penyaluran daya menjadi sangat penting. Tujuan dari pengaturan optimisasi tegangan adalah untuk meminimalisasi rugi-rugi daya, juga menjaga penampilan tegangan yang diinginkan seperti yang dibutuhkan konsumen. Sekarang ini teknik optimisasi numerik dan pendekatan sistem cerdas digunakan dengan
Artificial Intelegency diaplikasikan untuk mendukung operasi sistem tenaga.
Sebagai paradigma baru untuk optimisasi salah satunya menggunakan pendekatan dengan Algoritma Genetika. Algoritma Genetika adalah algoritma yang didasarkan pada seleksi genetik alam. Algoritma menyediakan solusi pada permasalahan yang luas dan lebih komplek.
Studi ini menyajikan penggunaan
Algoritma Genetika yang dibandingkan dengan metode konvensional untuk menyelesaikan masalah optimisasi tegangan.
Daftar Simbol
PL = rugi daya aktif
QL = rugi daya reaktif
Y = matrik admitansi
Gj = matrik real
B = matrik admitansi imajiner
n = total bus
i = bus i
j = bus j
V = tegangan pada bus
e = tegangan riil pada bus
f = tegangan riil bus
Ii = Aliran arus ke bus I
c = arus pada bus
d = arus imajiner pada bus
II. ANALISIS ALIRAN DAYA
Analisis aliran daya adalah hal yang paling
penting dalam perencanaan dan disain
pengembangan sistem daya terutama dalam menghitung operasi terbaik dari sistem yang terpasang [3]. Prinsip informasi didasarkan dari studi aliran daya yakni tegangan dan sudut fase tegangan pada tiap bus dan daya aktif dan daya reaktif yang mengalir pada tiap saluran. Dalam studi ini metode Newton Rapshon digunakan untuk menghitung aliran daya.
A. Aplikasi Metode Newton Raphson
Metode Newton Raphson digunakan karena lebih reliabel dan lebih cepat dalam konvergensi. Metode ini kurang sensitif terhadap beberapa faktor yang menyebabkan kelemahan atau tidak konvergen denga metode aliran daya yang lain [1].
Rata-rata nilai konvergen relatif lebih bebas dari ukuran sistem. Dalam studi ini koordinat
rectangular dan admitansi Ybus dipergunakan [4].
B. Koordinat Rectangular
Daya pada sistem bus i pada sistem n-bus dapat digambarkan sebagai :
2
Si = Pi - jQi = Vi*II (1.0) atau
n j j ijV Y 1 i i j i- Q V* P (2.0) kemudian Vi = ei + jFi (3.0) Yij = Gif - jBij (4.0)
n j i j i ij ij i Y V C d I 1 (5.0)Dimana Ii didefinisikan sebagai arus yang
mengalir ke bus i. Setelah disubstitusikan, persamaan (2.0) dapat ditulis sebagai :
n i j j ij j ij i i ij j ij i i e Ge B f f G f B e P [ ( ) ( )](6.0) dan
n i j j ij j ij i j ij j ij i i f G e B f e G f B e Q [ ( ) ( )](7.0)Dengan catatan bahwa Pi dan Qi adalah fungsi
dari ej, ei, fi dan fj. Untuk tiap beban bus PQ, Pi dan Qi dapat dihitung dengan persamaan (6.0) dan (7.0), Secara langsung dapat dihitung untuk tiap estimasi nilai e dan f. Setelah masing-masing iterasi, perhitungan dari nilai Pi,calc dan
Qi,calc kemudian dibandingkan dengan nilai
yang telah diketahui dari nilai Pi,calc dan Qi,calc. Dengan cara yang sama, untuk tiap PV bus generator, nilai tegangan bus dapat dihitung untuk perkiraan e dan f sebagai :
2 2 I i i
e
f
V
(8.0)Selanjutnya perhitungan nilai tegangan
dibandingkan dengan nilai yang
dispesifikasikannya. Setelah itu, nilai koreksi dari iterasi k dapat dituliskan :
) ( , , ) ( k calc i spec i k i
P
P
P
(9.0)
) ( , , ) ( k calc i spec i k iQ
Q
Q
(10.0)
) ( , , 2 k calc i spec i i Q Q V (11.0)
Karena perubahan pada P, Q, dan V2
berhubungan dengan perubahan e dan f pada persamaan (6.0) - (8.0), hal ini memungkinkan
variabel tersebut menjadi bentuk umum
Jacobian.
(12.0)
Hasil dari nilai e's dan f's dapat digunakan
dalam persamaan berikut untuk menentukan tegangan bus estimasi baru untuk iterasi berikutnya ) ( ) ( ) ( k i k i i k i e e e (13.0) ) ( ) ( ) ( k i k i I k i f ef f (14.0)
Proses ini diulang hingga nilai P, Q dan |Vi|
2
dapat ditentukan dari persamaan (9.0) - (11.0) lebih kecil daripada indeks ketepatan. Hal ini memungkinkan pengembangan arus bus diberikan dengan persamaan (15.0) sebagai berikut :
n i j ij j ij n i j j ij j ij j i eG f B f f G e B I ( ) ( ) (15.0) Dimana
n i j ij j ij j i eG f B c ( ) (16.0)
n i j ij j ij j i f G e B d ( ) (17.0)
n i j ij j ij j ii i ii i i eG f B eG f B c ( ) (18.0)
n i j ij j ij j ii i ii i i fG eB f G e B d ( ) (19.0)Dengan mensubstitusikan persamaan (16.0) dan (17.0) ke dalam persamaan (6.0), daya aktif dari bus i dapat dihitung dengan persamaan :
Pi = eici + fidi (20.0)
Dengan cara yang sama, dari persamaan (7.0), daya reaktif bus i menjadi :
Qi = fici - ei di (21.0)
II. METODE PENGATURAN TEGANGAN
Tingkat pengaturan tegangan sangat tergantung dari pengaturan produksi, penyaluran dan aliran daya reaktif pada seluruh level sistem. Secara normal ada beberapa metode pengaturan tegangan [5], seperti trafo tap-changer, booster transformer, injeksi daya reaktif dan sebagainya.
Dalam tulisan ini pengaturan tegangan
menggunakan daya reaktif atau kapasitor shunt, sebagai unsur utama kontrol tegangan.
A. Shunt
Kapasitor shunt digunakan untuk rangkain daya
lagging. Kapasitor dihubungkan secara langsung
ke busbar atau lilitan tersier dari trafo utama dan memperpendek jarak untuk meminimalisir rugi-rugi dan drop tegangan.
=
=
P
Q
|V|
2J
1J
3J
5J
2J
4J
6J
2
f
3
Penggunaan kapasitor untuk mencari rugi daya minimum dan pada saat yang sama menjaga kualitas tegangan dengan batas tertentu. Ketika bank kapasitor ditempatkan di bus, matrik admitansi Y berubah.
Perubahan dalam matrik Y digambarkan pada tabel 1.0, dimana hanya nilai yang diagonal yang berpengaruh. YI1 + U1 Y12 …Y1n Y21 Y22 + U2 …..Y2n . . . Yn1 Yn2 Ynn+Un
Tabel 1.0 : Matrik admitansi dengan
kapasitor shunt untuk sistem n bus. Nilai dari U1, U2,……..dan Un dihitung dengan
Algoritma Genetika untuk tiap generasi dari
kromosom.The value of U1, U2, …. And Un are
computed by GA for each generation of the chromosomes.
IV. ALGORITMA GENETIKA
Algoritma Genetika adalah metode
pencarian algoritma didasarkan pada mekanika seleksi alam dan genetik [6].
Algoritma Genetika adalah algoritma yang digunakan untuk optimisasi berdasar prinsip pencarian biologi yang simultan berdasar banyak titik dalam space pencarian. AG bekerja tidak dengan parameter-parameter namun dengan nomor-nomor string yang menggambarkan satuan parameter. Dengan
aturan aturan probabilitas untuk metode
pencarian algoritma. Dengan memperhatikan banyak titik dalam space pencarian yang secara simultan mengurangi perubahan konvergensi untuk nilai minimal.
Proses AG mengikuti aturan berikut [7].
1) Tentukan inisial populasi (biasanya string dibangkitkan acak)
2) Evaluasi seluruh individu (aplikasikan beberapa fungsi atau formula individu) 3) Menyeleksi populasi baru dari populasi awal
berdasar nilai fitnes dari individu yang diberikan oleh fungsi evaluasi.
4) Aplikasikan operator genetika seperti mutasi dan pindah silang untuk tiap anggota populasi untuk mendapatkan pemecahan baru.
5) Evaluasi individual baru yang terbentuk. 6) Ulangi langkah 3-6 (satu generasi) hingga
terminasi kriteria memuaskan (biasanya berbentuk nomor generasi tertentu)
Konsep dari pelaksanaan adalah
mempertahankan nilai fitnes. Pemecahan
reproduksi sukses secara langsung menjadi nilai fitness, yang ditandai selama evaluasi. Solusi terburuk mungkin tidak diproduksi pada semua sisi.
Kemajuan AG untuk memanipulasi
komputasi secara sederhana, dan AG memiliki kemampuan pencarian untuk menentukan nilai optimasi. Proses selanjutnya dari AG adalah kemampuan yang lebih kuat dengan respon problem yang lebih komplek.
V. DESKRIPSI AG DALAM MASALAH OPTIMISASI TEGANGAN
Untuk mengimplementasikan algoritma genetika dalam optimisasi masalah tegangan, struktur pita algoritma dihitung. Tiap unit kapasitor daya reaktif pada sistem, yang merupakan peralatan terkontrol, dikodekan dalam digit biner, dan ditempatkan pada sebuah string. Jumlah panjang pita kemudian akan dipilih.
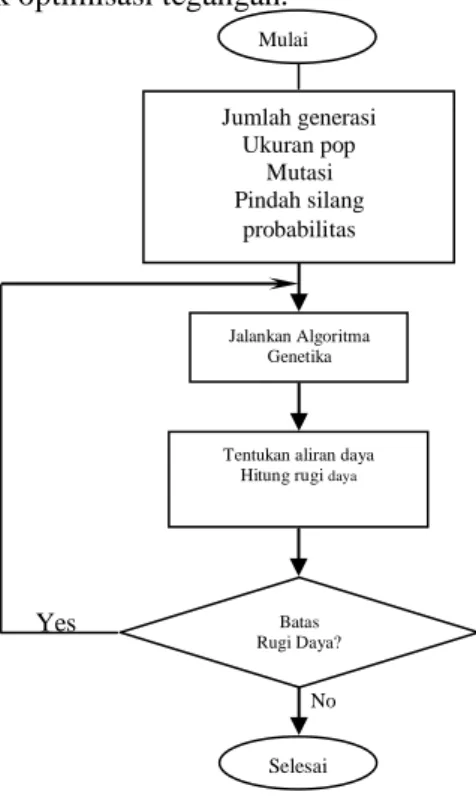
Selanjutnya tiap kombinasi nilai kapasitor direpresentasikan dalam bentuk pita. Gambar 1 menampilkan diagram alir dari operasi AG untuk optimisasi tegangan.
Gambar 1. Flow chart Algoritma Genetika dalam optimisasi tegangan Yes No Mulai Jumlah generasi Ukuran pop Mutasi Pindah silang probabilitas Jalankan Algoritma Genetika
Tentukan aliran daya Hitung rugi daya
Batas Rugi Daya?
4
A. Metode Kodifikasi untuk Kapasitor
Langkah awal dalam implementasi algoritma
genetika untuk menyelesaikan masalah
penempatan kapasitor adalah menghitung
struktur kode suseptansi kapasitor
multiparameter, pemetaan, kode fixed point digunakan pada aplikasi ini sebagaimana gambar 2. Sebuah pita 5-bit mewakili tiap parameter.
01101 | 00010 | 1101 | 10000 U1 U2 U3 U4
Gambar 2 : Multi Parameter Kode Dekoding ditandai dengan integer yang secara
linierr dipetakan dari [0,21] hingga interval
tertentu [Umin, Umax.]. Nilai dari 2 adalah 25 = 32
dan kemudian, koding pemetaan secara persis diberikan oleh : = 1 25 . max . min U U
Algoritma Genetika dalam menghitung fungsi fitnes menggunakan routine kode. Routine kode dapat digunakan untuk satu atau multi parameter dalam masalah optimisasi.
B. Pemetaan Fungsi Obyek ke dalam Bentuk Fitness
Komputasi fungsi obyektif dari persamaan 1.0 diterapkan untuk tiap satuan populasi. Untuk mencari populasi terbaik, lebih baik merubah fungsi obyektif menjadi fungsi fitness f(V).
Persamaan 23.0 menunjukkan bagaimana
perubahan tersebut:
F(V) = Cmax - g(V) when g(V) < Cmax = 0
Cmax dipilih karena lebih besar dari nilai g dalam
populasi ini.
VI. HASIL SIMULASI
Hasil simulasi diperoleh dari 5-busbar dan sistem IEEE 14-busbar. Dalam setiap percobaan dengan menggunakan AG yang digunakan parameter tetap :
Ukuran populasi= 10
Probabilitas pindah silang = 0.5 Mutasi = 60%
Jumlah generasi = 100
Tabel 1 dan 4 menunjukkan perrhitungan aliran beban. Dengan kapasitor shunt dipilih dengan algoritma genetika rugi daya dapat direduksi seperti Tabel 2 dan 5, sementara tegangan pada busbar diberikan selisih kecil. Tabel 3 dan 6 menunjukkan nilai kapasitor shunt yang diseleksi dengan algoritma genetika.
A. 5-Busbar
Tabel 1. Sistem 5-Busbar tanpa Kapasitor Shunt
Bus Voltages Mag Angles Power Loss MW MVAR 1 2 3 4 5 1.06 0 1.0474 -2.8064 1.0242 -4.9970 1.0236 -5.3291 1.0179 -6.1503 129.5095 -7.6570 20.0704 20.0352 -44.8931 -14.9578 -39.9972 -4.9533 -59.9934 -9.9044
Hasil perhitungan kerugian sistem adalah PLoss =
5.6062 MW dan QLoss = -17.4373 MWAR.
Tabel 2. Sistem 5-Busbar dengan Kapasitor Shunt
Bus Voltages Mag Angles Power Loss MW MVAR 1 2 3 4 5 1.06 0 1.0517 -2.8694 1.0328 -5.1120 1.0318 -5.4316 1.0253 -6.2279 129.4561 -18.7815 20.0704 20.0417 -44.8931 -14.9498 -39.9993 -4.9485 -59.9949 -9.8981
Hasil perhitungan rugi sistem adalah PLoss =
4.5642 MW dan QLoss = -28.5362 MWAR.
Tabel 3. Nilai Kapasitor Shunt yang dipilih dengan Algoritma Genetika
Parameters Final Susceptance Value of Capacitor U1 U2 U3 U4 U5 0.0 0.0 0.07 0.01 0.02 B. IEEE 14-Busbar
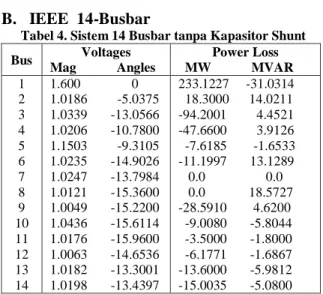
Tabel 4. Sistem 14 Busbar tanpa Kapasitor Shunt
Bus Voltages Mag Angles Power Loss MW MVAR 1 2 3 4 5 6 7 8 9 10 11 12 13 14 1.600 0 1.0186 -5.0375 1.0339 -13.0566 1.0206 -10.7800 1.1503 -9.3105 1.0235 -14.9026 1.0247 -13.7984 1.0121 -15.3600 1.0049 -15.2200 1.0436 -15.6114 1.0176 -15.9600 1.0063 -14.6536 1.0182 -13.3001 1.0198 -13.4397 233.1227 -31.0314 18.3000 14.0211 -94.2001 4.4521 -47.6600 3.9126 -7.6185 -1.6533 -11.1997 13.1289 0.0 0.0 0.0 18.5727 -28.5910 4.6200 -9.0080 -5.8044 -3.5000 -1.8000 -6.1771 -1.6867 -13.6000 -5.9812 -15.0035 -5.0800
5
Hasil perhitungan rugi sistem adalah
P
Loss= 14.8648 MW dan
Q
Loss= 5.6704 MWAR
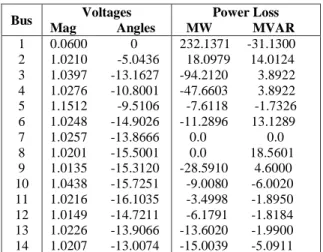
Tabel 5 : Sistem 14-Busbar tanpa Kapasitor Shunt
Bus Voltages Mag Angles Power Loss MW MVAR 1 2 3 4 5 6 7 8 9 10 11 12 13 14 0.0600 0 1.0210 -5.0436 1.0397 -13.1627 1.0276 -10.8001 1.1512 -9.5106 1.0248 -14.9026 1.0257 -13.8666 1.0201 -15.5001 1.0135 -15.3120 1.0438 -15.7251 1.0216 -16.1035 1.0149 -14.7211 1.0226 -13.9066 1.0207 -13.0074 232.1371 -31.1300 18.0979 14.0124 -94.2120 3.8922 -47.6603 3.8922 -7.6118 -1.7326 -11.2896 13.1289 0.0 0.0 0.0 18.5601 -28.5910 4.6000 -9.0080 -6.0020 -3.4998 -1.8950 -6.1791 -1.8184 -13.6020 -1.9900 -15.0039 -5.0911
Hasil perhitungan rugi sistem adalah PLoss =
13.5577 MW dan QLoss = 4.4213 MWAR
Tabel 6 : Nilai Kapasitor Shunt yang dipilih Algoritma Genetika
Parameters Final Susceptance Value of Capacitor
U1 U2 U3 U4 U5 U6 U7 U8 U9 U10 U11 U12 U13 U14 0.0 0.0 0.0 0.056 0.13 0.0 0.04 0.0 0.19 0.02 0.0 0.08 0.035 0.05
VII. KESIMPULAN
Simulasi dilakukan dengan menggunakan
Algoritma Genetika untuk mengatasi
permasalahan optimisasi tegangan dengan
mengatur kapasitor shunt. Dari beberapa percobaan dapat dilihat bahwa pendekatan algoritma genetika berhasil membangkitkan nilai
kapasitor shunt yang tepat yang akan
ditempatkan pada tiap bus untuk menghasilkan rugi daya yang minimum dan sekaligus menghasilkan optimasi tegangan.
VIII. DAFTAR PUSTAKA
[1] Stagg, G.W. and El-Abiad, A.H.
Computer Methods in Power System Analysis, McGraw-Hill Kogakusha Ltd. Tokyo, 1968.
[2] D.I. Sun Et. Al, Optimal Power Flow By Newton Approach, IEEE transaction on PS Vols. No. 21984, pp 2864.
[3] El-Hawary, M.E. Power Systems Design and Analysis. Prentice-Hall, Reston, Virginia 1983.
[4] Gonen, T., Electric Power Distribution System Engineering, McGraw-Hill, New York, 1996.
[5] Kundur, Prabha, Power System Stability and Control. McGraw-Hill. Auckland Bogota 1994.
[6] Golber, D.E. Genetic Algorithms in
Search, Optimization and Machine
Learning. Addison-Wesley, USA. 1989.
[7] C.R. Houck, J. Joines, and M. Kay. A
Genetic Algorithms for Optimization : A Matlab Implementation ACM Tran. On Math. Software 1996