BAB II
DASAR TEORI
2.1 Sistem Pendeteksi Benturan
Sistem pendeteksi benturan saat ini khususnya dibutuhkan didalam pengiriman barang-barang yang membutuhkan pengawasan khusus agar pengaturan awal dari sistem pengoperasian barang tersebut tidak berubah selama masa pengirimannya. Karena perubahan pengaturan tersebut kemungkinan besar tidak akan bisa dilihat dari keadaan fisik luar dari barang, maka dibutuhkan ketelitian didalam mengamati benturan yang terjadi, dan hal ini dilakukan dengan melihat data nilai magnitudo dari benturan yang terjadi, apakah nilai tersebut telah melebihi nilai ambang yang diperbolehkan atau tidak, dan perlu juga diketahui berapa besar nilainya.
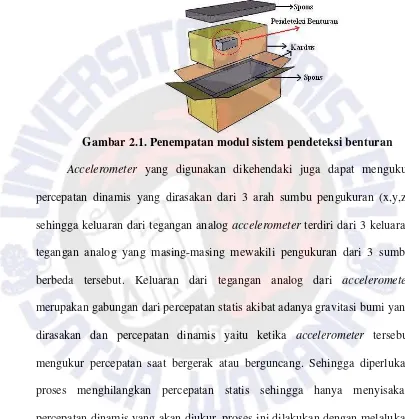
Sistem pendeteksi benturan merupakan suatu piranti yang mudah dibawa dan akan dipasangkan pada kemasan dari barang kiriman yang akan diamati, dimana penempatan dari modul pada kemasan barang contohnya ditunjukkan pada gambar 2.1. merupakan contoh penempatan modul yang sudah diterapkan[2]. Sistem pendeteksi benturan dibentuk dari komponen utama antara lain accelerometer sebagai pendeteksi percepatan benturan, modul pengolah isyarat digital (menggunakan modul Digital Signal Controller), modul pewaktu dan modul penyimpan data (modul memori).
Accelerometer akan bekerja dengan memberikan keluaran berupa tegangan analog yang perubahannya setara dengan perubahan percepatan dinamis yang terukur oleh accelerometer tersebut.
Gambar 2.1. Penempatan modul sistem pendeteksi benturan
Accelerometer yang digunakan dikehendaki juga dapat mengukur percepatan dinamis yang dirasakan dari 3 arah sumbu pengukuran (x,y,z) sehingga keluaran dari tegangan analog accelerometer terdiri dari 3 keluaran tegangan analog yang masing-masing mewakili pengukuran dari 3 sumbu berbeda tersebut. Keluaran dari tegangan analog dari accelerometer
dibandingkan dengan nilai ambang yang sudah diatur sebelumnya. Pada gambar 2.2 hingga 2.5 akan diperlihatkan contoh dari isyarat percepatan dari
accelerometer 3 sumbu ketika melalui beberapa tahap pemfilteran sampai dihasilkan nilai perhitungan magnitudo yang ingin dibandingkan dengan nilai ambangnya, dimana contoh ini didapatkan dari sumber acuan dari perancangan alat pendeteksi benturan yang sudah ada[4].
….. (2.1)
= Rerata integral magnitudo gabungan ketiga sumbu terhadap waktu. = Magnitudo sumbu pertama.
= Magnitudo sumbu kedua. = Magnitudo sumbu ketiga
Lamanya waktu pengukuran.
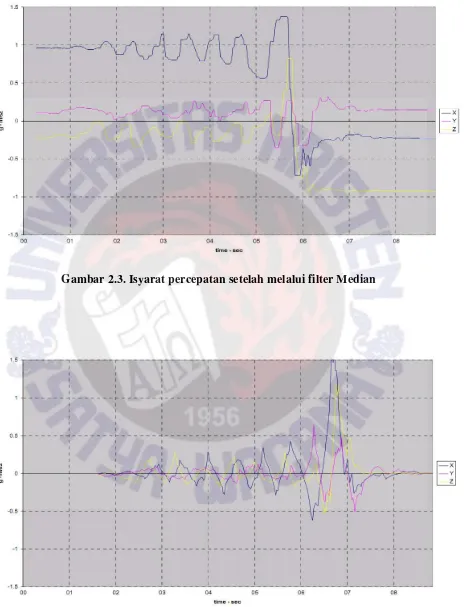
Gambar 2.3. Isyarat percepatan setelah melalui filter Median
Gambar 2.5. Nilai rerata integral magnitudo dari isyarat percepatan
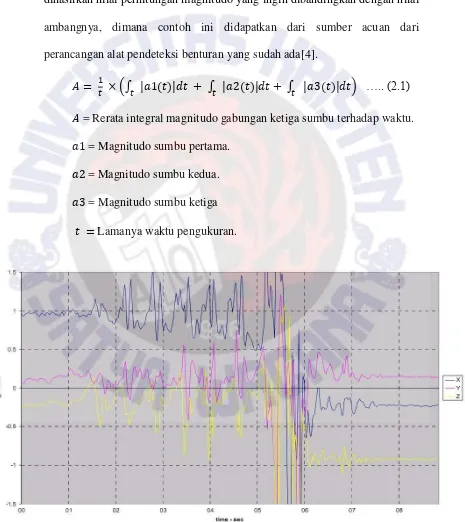
Pada gambar 2.1 merupakan isyarat percepatan hasil keluaran dari
accelerometer untuk pengukuran ketiga sumbu dimana accelerometer
mengalami guncangan yaitu antara waktu detik 1 hingga 5, dan kemudian mendeteksi benturan pada detik 5 hingga 6. Pada gambar tersebut terlihat bahwa percepatan statis akan memberikan penambahan nilai pada keluaran hingga hampir sebesar 1 g untuk sumbu pengukuran yang searah dengan arah percepatan gravitasi bumi.
Untuk gambar 2.3 merupakan hasil perhitungan dari rerata integral magnitudo percepatan untuk ketiga sumbu pengukuran terhadap waktu, dimana dihitung untuk tiap waktu 0,8 detik dan kemudian hasilnya akan dibandingkan dengan nilai ambang yang sudah diatur sebelumnya. Proses pengolahan isyarat percepatan tersebut dilakukan secara digital sehingga isyarat percepatan keluaran dari analog perlu untuk diubah menjadi digital mengunakan modul pengubah analog ke digital (ADC), dimana data analog akan dicuplik kedalam bentuk data digital tiap waktu 22,22ms dan untuk tiap data berjumlah 13 akan dilalukan melalui filter median dan data berjumlah 36 akan dilalukan melalui filter FIR lolos atas dan kemudian dihitung rerata magnitudonya untuk kemudian dibandingkan dengan nilai ambang yang sudah diatur.
Data dari rerata magnitudo tersebut kemudian akan disimpan kedalam modul memori yaitu EEPROM, dan juga waktu terjadinya benturan akan sekaligus disimpan kedalam modul memori tersebut. Pada akhirnya ketika data informasi dibutuhkan maka pengguna dapat mengambil data dari memori untuk dikirim melalui jalur komunikasi serial RS-232 kedalam perangkat lunak aplikasi desktop yang akan dibuat.
2.2 Accelerometer MMA7260Q
Didalam tugas akhir ini, digunakan accelerometer MMA7260Q sebagai sensor pendeteksi percepatan dinamis. Accelerometer
MMA7260Q adalah accelerometer tri-axial jenis kapasitif dimana mendeteksi percepatan yang muncul dengan menggunakan dua buah mikromesin g-sel dan sebuah pengkondisi sinyal ASIC (Application Specific Integrated Circuit) yang dikemas kedalam sebuah IC tunggal[5]. Sebuah mikromesin g-sel dapat dimodelkan sebagai 2 buah lempeng konduktor yang ditempatkan pada sisi pinggir dan dibuat tidak dapat bergerak, dan 1 buah lempeng konduktor yang ditempatkan pada sisi tengah yang dapat bergerak-gerak disepanjang garis lurus antara kedua lempeng pinggir tersebut.
Gambar 2.6. Model fisik sederhana dari g-sel
Karena adanya perubahan jarak antara lempeng tengah dengan pinggir-pinggir yang timbul selama terjadinya percepatan, maka terjadi pula perubahan nilai kapasitansi antar pasangan lempeng tersebut, yang dapat dinyatakan melalui persamaan berikut.
…………. (2.2)
dimana, C = nilai kapasitansi
D = jarak antara dua lempeng konduktor A = luas area dari lempengan konduktor ε = konstanta dielektrik
Nilai kapasitansi dari 2 pasang lempeng induktor tersebut kemudian akan diolah oleh bagian pengkondisi isyarat ASIC untuk dihasilkan keluaran berupa tegangan analog yang nilainya setara terhadap percepatan yang dialami oleh modul accelerometer tersebut.
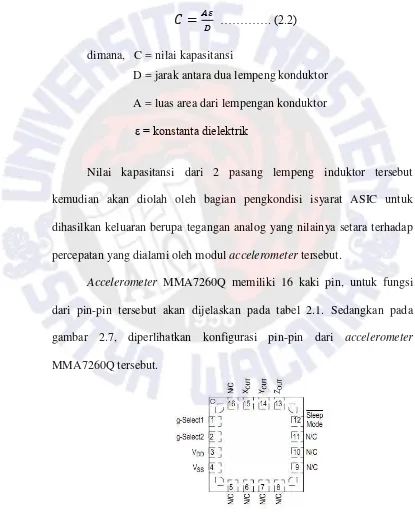
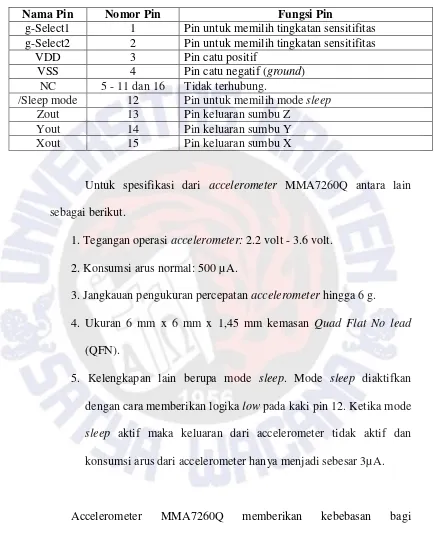
Accelerometer MMA7260Q memiliki 16 kaki pin, untuk fungsi dari pin-pin tersebut akan dijelaskan pada tabel 2.1. Sedangkan pada gambar 2.7, diperlihatkan konfigurasi pin-pin dari accelerometer
MMA7260Q tersebut.
Tabel 2.1. Fungsi pin-pin accelerometer MMA7260
Nama Pin Nomor Pin Fungsi Pin
g-Select1 1 Pin untuk memilih tingkatan sensitifitas g-Select2 2 Pin untuk memilih tingkatan sensitifitas
VDD 3 Pin catu positif
VSS 4 Pin catu negatif (ground) NC 5 - 11 dan 16 Tidak terhubung.
/Sleep mode 12 Pin untuk memilih mode sleep
Zout 13 Pin keluaran sumbu Z
Yout 14 Pin keluaran sumbu Y
Xout 15 Pin keluaran sumbu X
Untuk spesifikasi dari accelerometer MMA7260Q antara lain sebagai berikut.
1. Tegangan operasi accelerometer: 2.2 volt - 3.6 volt. 2. Konsumsi arus normal: 500 µA.
3. Jangkauan pengukuran percepatan accelerometer hingga 6 g. 4. Ukuran 6 mm x 6 mm x 1,45 mm kemasan Quad Flat No lead
(QFN).
5. Kelengkapan lain berupa mode sleep. Mode sleep diaktifkan dengan cara memberikan logika low pada kaki pin 12. Ketika mode
sleep aktif maka keluaran dari accelerometer tidak aktif dan konsumsi arus dari accelerometer hanya menjadi sebesar 3µA.
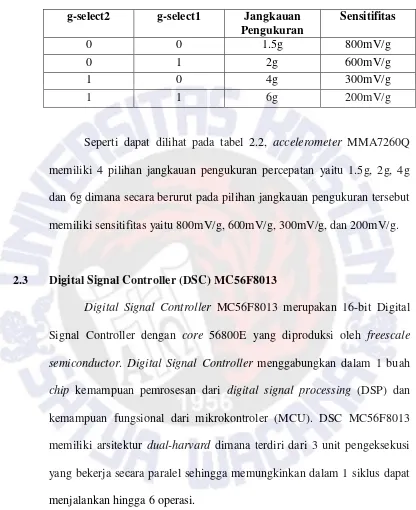
Tabel 2.2. Pasangan pemilihan g-select
Seperti dapat dilihat pada tabel 2.2, accelerometer MMA7260Q memiliki 4 pilihan jangkauan pengukuran percepatan yaitu 1.5g, 2g, 4g dan 6g dimana secara berurut pada pilihan jangkauan pengukuran tersebut memiliki sensitifitas yaitu 800mV/g, 600mV/g, 300mV/g, dan 200mV/g.
2.3 Digital Signal Controller (DSC) MC56F8013
Digital Signal Controller MC56F8013 merupakan 16-bit Digital Signal Controller dengan core 56800E yang diproduksi oleh freescale semiconductor. Digital Signal Controller menggabungkan dalam 1 buah
chip kemampuan pemrosesan dari digital signal processing (DSP) dan kemampuan fungsional dari mikrokontroler (MCU). DSC MC56F8013 memiliki arsitektur dual-harvard dimana terdiri dari 3 unit pengeksekusi yang bekerja secara paralel sehingga memungkinkan dalam 1 siklus dapat menjalankan hingga 6 operasi.
inputan hingga 5,5 volt pada pin masukan keluaran tanpa menimbulkan kerusakan pada DSC MC56F8013 tersebut.
2.3.1. Fasilitas yang dimiliki oleh Digital Signal Controller MC56F8013
Digital Signal Controller MC56F8013 memiliki sejumlah fasilitas sebagai berikut.
1. Pemrosesan data memiliki kecepatan hingga 32 MIPS (Million Instructions per Second) pada frekuensi kerja 32 MHz.
2. 16 KB program Flash, 4 KB program RAM. 3. Satu modul Serial Communication Interface (SCI). 4. Satu modul Serial Peripheral Interface (SPI). 5. 26 jalur General Purpose Input Output (GPIO). 6. Satu 16-bit Quad Timer.
7. Memiliki antarmuka JTAG.
8. Akumulator paralel Single Cycle 16 x 16-bit (MAC). 9. Empat akumulator 36-bit .
10. Enam saluran Analog-to-Digital resolusi 12 bit (ADC). 11. Enam saluran modul PWM.
12. Memiliki satu buah port I2C.
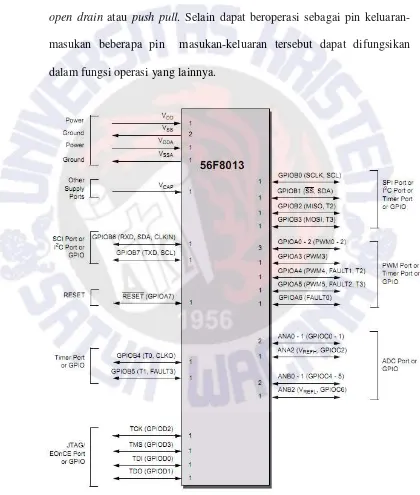
2.3.2. Pin-pin General Purpose Input/Ouput (GPIO)
MC56F8013 memiliki 26 pin masukan-keluaran yaitu 8 pin GPIOA, 8 pin GPIOB, 6 pin GPIOC dan 4 pin GPIOD dimana masing-masing pin masukan-keluaran dapat dipilih untuk bekerja dalam keadaan
open drain atau push pull. Selain dapat beroperasi sebagai pin keluaran-masukan beberapa pin keluaran-masukan-keluaran tersebut dapat difungsikan dalam fungsi operasi yang lainnya.
Tabel 2.3. Fungsi-fungsi pin DSC MC56F8013
Nama Pin Nomor
Pin
Fungsi Pin
GPIOB6 1 Pin masukan-keluaran, sebagai jalur penerima data SCI, berfungsi sebagai
jalur SDA dalam komunikasi I2C.
GPIOB7 3 Pin masukan-keluaran, sebagai jalur pengirim data SCI , sebagai jalur clock
dalam komunikasi I2C.
GPIOA7 15 Pin masukan-keluaran, Reset aktif low dimana fungsi reset pin ini tidak akan aktif jika difungsikan sebagai masukan-keluaran.
GPIOB4 19 Pin masukan-keluaran, saluran masukan-keluaran Timer0, sinyal clock
keluaran yang telah melalui buffer.
GPIOB5 4 Pin masukan-keluaran, saluran masukan-keluaran Timer1.
GPIOD2 14 Pin masukan-keluaran, pin Tes ClockInput (TCK) untuk JTAG. GPIOD3 31 Pin masukan-keluaran, pin Test Mode Select input (TMS) untuk JTAG.
GPIOD0 30 Pin masukan-keluaran, pin Test Data Input (TDI)untuk JTAG.
GPIOD1 32 Pin masukan-keluaran, pin Test Data Output (TDO) untuk JTAG. GPIOB0 21 Pin masukan-keluaran, pin SPI Serial Clock. (SCLK).
GPIOB1 2 Pin masukan-keluaran, pin SPI Slave Select.
GPIOA1 28 Pin masukan-keluaran, pin keluaran PWM1.
GPIOA2 23 Pin masukan-keluaran, pin keluaran PWM2.
GPIOA3 24 Pin masukan-keluaran, pin keluaran PWM3.
GPIOA4 22 Pin masukan-keluaran, pin keluaran PWM4, saluran masukan-keluaran
Timer2.
GPIOA5 20 Pin masukan-keluaran, pin keluaran PWM5, Saluran masukan-keluaran
Timer3.
GPIOA6 18 Pin masukan-keluaran, pin fault0.
GPIOC0 12 Pin masukan-keluaran, saluran 0 ADC A (Analog to Digital Converter A). GPIOC1 11 Pin masukan-keluaran, saluran 1 ADC A (Analog to Digital Converter A).
GPIOC2 10 Pin masukan-keluaran, saluran 2 ADC A (Analog to Digital Converter A), pin VREF high.
GPIOC4 5 Pin masukan-keluaran, saluran 0 ADC B (Analog to Digital Converter B). GPIOC5 6 Pin masukan-keluaran, saluran 1 ADC B (Analog to Digital Converter B).
GPIOC6 7 Pin masukan-keluaran, saluran 2 ADC B (Analog to Digital Converter B), pin VREF Low.
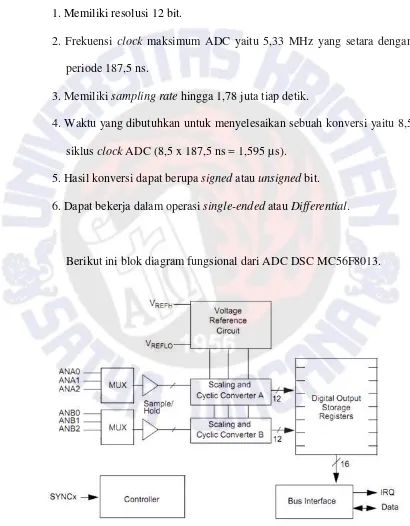
2.3.3. Pengubah Analog ke Digital (ADC) DSC MC56F8013
Berikut ini karakteristik dari kelengkapan ADC pada DSC MC56F8013.
1. Memiliki resolusi 12 bit.
2. Frekuensi clock maksimum ADC yaitu 5,33 MHz yang setara dengan periode 187,5 ns.
3. Memiliki sampling rate hingga 1,78 juta tiap detik.
4. Waktu yang dibutuhkan untuk menyelesaikan sebuah konversi yaitu 8,5 siklus clock ADC (8,5 x 187,5 ns = 1,595 µs).
5. Hasil konversi dapat berupa signed atau unsigned bit. 6. Dapat bekerja dalam operasi single-ended atau Differential.
Berikut ini blok diagram fungsional dari ADC DSC MC56F8013.
DSC MC56F8013 memiliki 2 rangkaian ADC lengkap yang terpisah dimana masing-masing memiliki memiliki 3 saluran masukan untuk isyarat analog serta rangkaian pencuplik dan penahannya sendiri-sendiri. Kedua rangkaian ADC tersebut memiliki tegangan referensi yang sama dan juga memiliki tempat penyimpan keluaran data digital yang sama.
ADC pada DSC MC56F8013 dapat bekerja dalam 2 pilihan operasi yaitu single-ended dan diferensial. Ketika dioperasikan dalam single-ended ADC akan menggunakan tegangan referensi internal yang sudah ditentukan yaitu VDDA dan VSSA. Sedangkan pada pilihan operasi diferensial ADC akan menggunakan tegangan referensi dari pin VREF high
(GPIOC2) dan pin VREF low (GPIOC6).
2.3.4. Modul Timer
Berikut ini karakteristik dari kelengkapan modul timer pada DSC MC56F8013.
1. Empat buah, counter/timer 16-bit.
2. Dapat menghitung dengan perhitungan naik atau turun.
3. Memiliki prescaler yang terpisah untuk tiap keempat timer tersebut. 4. Tiap timer memiliki kemampuan mengambil nilai (capture) dan
membandingkan nilai (compare).
2.4 Modul Pewaktu PCF8583
Berikut ini karakteristik dari modul pewaktu PCF8583.
1. Menggunakan antaramuka bus I2C untuk melakukan transaksi data. 2. Tegangan operasi yaitu: 2.5 volt hingga 6 volt.
3. Arus operasi maksimum: 50 µs.
4. Beroperasi dengan menggunakan kristal 32,678 kHz atau 50 Hz. 5. Data berupa data waktu dan kalendar.
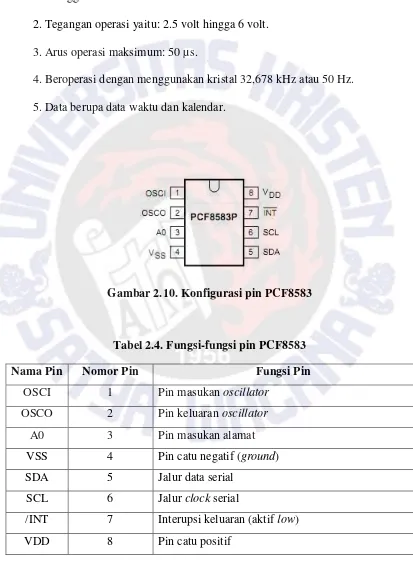
Gambar 2.10. Konfigurasi pin PCF8583
Tabel 2.4. Fungsi-fungsi pin PCF8583
Nama Pin Nomor Pin Fungsi Pin
OSCI 1 Pin masukan oscillator
OSCO 2 Pin keluaran oscillator
A0 3 Pin masukan alamat
VSS 4 Pin catu negatif (ground)
SDA 5 Jalur data serial
SCL 6 Jalur clock serial
/INT 7 Interupsi keluaran (aktif low)