Ringkasan—Perkembangan teknologi dalam bidang animasi 3 dimensi (3D) saat ini berkembang sangat pesat. Namun demikian, animasi 3D yang dibuat di Indonesia masih terkesan kaku dan gerakan objek (misalnya gerakan manusia) belum menyerupai gerakan yang sesungguhnya. Untuk mengatasi masalah diatas, perkiraan pose model 3D bisa menjadi salah satu jalan kelu-arnya. Dengan adanya perkiraan pose dari model 3D nantinya gerakan dari model 3D bisa dibuat dalam waktu yang lebih singkat.
Dalam penelitian ini didesain dan diimplementasikan perki-raan bentuk dan pose dari model manusia 3 dimensi (3D). Model yang digunakan adalah 3D Cylindrical Model. Gerakan dari model manusia dibagi menjadi beberapa gambar yang berurutan. Dari urutan gambar tersebut dicari letak keypoint. Keypoint yang sama dari gambar sebelumnya dicari padanannya pada gambar berikutnya. Pada penelitian ini, didapat rata-rata jumlah keypoint yang berubah lokasi mencapai 92,19 % dari jumlah keypoint pada setiap gambar acuan. Perubahan lokasi keypoint ini digunakan untuk menentukan pergerakan model, sehingga pose dari model manusia 3D dapat diprediksi.
Index Terms—markerless, SIFT
I. PENDAHULUAN
P
ERKEMBANGAN teknologi dalam bidang animasi 3 dimensi (3D) saat ini berkembang sangat pesat. Sering kali terlihat animasi 3D, baik dalam permainan maupun dalam perfilman. Sampai saat ini perlombaan dalam dunia animasi dilakukan oleh pengembang animasi tiada henti-hentinya. Pemodelan tokoh dalam animasi tersebut telah mengalami berbagai macam teknik. Dalam pembuatan animasi, baik untuk perfilman maupun untuk permainan, telah diciptakan berbagai macam teknik, agar tokoh didalamnya menyerupai manusia sesungguhnya. Mulai dari hanya pergerakan sendi bahu dan pangkal paha, hingga gerakan yang amat detil. Semakin detil pergerakan animasi tersebut, semakin nikmat animasi dirasakan.Namun demikian, animasi 3D yang dibuat di Indonesia masih kaku dan gerakan objek (misalnya gerakan manusia) belum menyerupai gerakan yang sesungguhnya. Hal ini diak-ibatkan, karena pembuatan animasi 3D hanya memanfaatkan software animasi 3D, dimana dengan software ini hanya bisa dibangun gerakan buatan, bukan gerakan alami sesungguhnya. Untuk itu perlu dirancang dan dibuat sebuah teknik pembuatan
‡2206 100 052, Jurusan Teknik Elektro ITS Surabaya
‡‡Dosen Pembimbing, Jurusan Teknik Elektro ITS
Surabaya([email protected])
‡‡Dosen Pembimbing, Jurusan Teknik Elektro ITS Surabaya
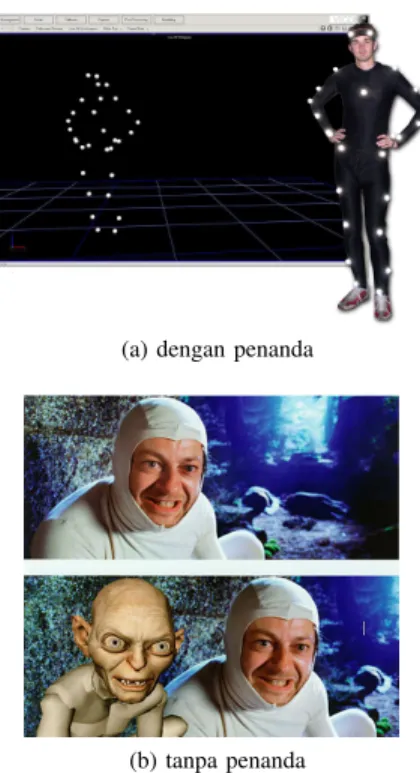
animasi 3D yang dapat menyerupai gerakan objek sesungguh-nya. Salah satu teknik untuk mendapatkan gerakan animasi tersebut adalah teknik penangkapan gerak (motion capture) baik dengan penanda maupun tanpa penanda (markerless).
Pada penelitian ini, akan dibuat suatu bentuk perkiraan pose manusia dengan menggunakan 3D cylindrical model. Dengan adanya perkiraan pose dari model 3D nantinya gerakan dari model 3D bisa dibuat menyerupai gerakan sesungguhnya dan dalam waktu yang lebih singkat.
II. DASARTEORI
A. Sistem Penangkapan Gerak Manusia
Motion capture, mocap, atau penangkap gerak adalah istilah yang digunakan untuk menjelaskan proses perekaman gerakan - gerakan dan mengubahnya ke dalam model digital. Awalnya ditemukan di Skotlandia, biasanya digunakan dalam militer, hiburan, olahraga, dan aplikasi medis. Dalam pembuatan film, hal ini merujuk pada perekaman gerakan manusia sebagai pelaku, dan menggunakan informasi ini untuk menggerakkan karakter digital dalam animasi 3D. Jika berbasis penanda, letak penanda digunakan untuk memandu penjejakan di bagian-bagian tubuh tertentu. Sistem ini sering menghasilkan penje-jakan yang kurang konsisten dikarenakan adanya penangkapan data titik yang hilang dan muncul kembali oleh kamera. Peri-stiwa ini terjadi disebabkan tertutupnya penanda oleh bagian tubuh yang lainnya. Selain itu, dengan basis penanda prediksi skeletal tubuh manusia kurang akurat (Zhou, 2004). Sedangkan sistem penangkapan gerak manusia tanpa penanda mulai di-implementasikan sebagai penyelesaian masalah mahalnya alat berbasis penanda dan ketidakmampuan prediksi penanda di skeletal tubuh (Poppe, 2007).
Penelitian dalam bidang visi komputer menyebabkan perkembangan yang pesat dalam sistem penangkap gerakan manusia dengan pendekatan tanpa penanda. Sistem penangka-pan gerak tanpa penanda yang dikembangkan di Stanford, University of Maryland, MIT, dan Max Planck Institute, tidak memerlukan subyek untuk menggunakan peralatan khusus untuk pelacakan. Algoritma komputer khusus dirancang un-tuk memungkinkan sistem unun-tuk menganalisis beberapa ali-ran input optik dan mengidentifikasi bentuk-bentuk manusia, memecahnya ke bagian-bagian penyusunnya untuk pelacakan. B. Estimasi Pose
Estimasi pose adalah proses estimasi konfigurasi data kine-matik atau struktur sambungan skeletal dari manusia. Proses ini merupakan bagian integral dari proses penjejakan seperti
(a) dengan penanda
(b) tanpa penanda
Gambar 1: Sistem penangkapan gerak manusia
pada pendekatan berbasis model di metode analisis dengan sintesis atau merupakan hasil observasi langsung dari seluruh frame. Algoritma estimasi pose secara umum dapat dikate-gorikan menjadi 3 buah berdasarkan permodelan manusianya: 1) Bebas-model, kategori ini tidak menggunakan model secara eksplisit dan bekerja dengan pendekatan bottom-up untuk menjejaki dan melabeli anggota tubuh di citra 2D (Wren, 1997) atau memetakannya langsung dari citra sekuensial 2D ke pose 3D.
2) Model tidak langsung, yang menggunakan informasi estimasi pose model dalam bentuk referensi atau tabel look-up sebagai panduan interpretasi data, khususnya pada proses pengenalan pose (Haritaoglu, 1998). 3) Model langsung, yang menggunakan model geometri
3D secara eksplisit sebagai representasi bentuk manusia dan struktur kinematik pada proses rekonstruksi pose. Pendekatan yang banyak dipakai adalah metode analisis dengan sintesis yang mengoptimalkan kemiripan antara proyeksi model dan citra teramati (Wachter, 1997). C. Model 3D
Model 3D mewakili objek 3D dengan menggunakan kumpu-lan titik-titik dalam ruang 3D, yang dihubungkan dengan berbagai bentuk geometris seperti segitiga, garis, permukaan lengkung, dll. Dengan adanya data titik yang terkumpul, model 3D dapat dibuat dengan menggabungkan titik-titik tersebut. Pada gambar 2 merupakan model 3D yang digunakan dalam penelitian ini.
D. Metode Scale-invariant Feature Transform
Scale-invariant feature transform (atau SIFT) adalah se-buah algoritma dalam visi komputer untuk mendeteksi dan
Gambar 2: 3D Cylindrical Model
mendeskripsikan fitur lokal di gambar. Algoritma ini dipub-likasikan oleh David Lowe pada tahun 1999.
Aspek penting dari pendekatan ini adalah bahwa ia meng-hasilkan sejumlah besar fitur yang padat menutupi gambar di atas rentang skala penuh dan lokasi. Sebuah gambar khas ukuran 500x500 piksel akan menimbulkan sekitar 2000 fitur yang stabil (walaupun jumlah ini bergantung pada konten gam-bar dan pilihan untuk berbagai parameter). Jumlah fitur yang sangat penting untuk pengenalan obyek, dimana kemampuan untuk mendeteksi benda-benda kecil di latar belakang beran-takan mengharuskan minimal 3 fitur secara benar dicocokkan dari tiap objek untuk identifikasi yang handal.
Algoritma dari SIFT terdiri dari 4 bagian utama:
1) Deteksi scale-space extrema. Tahap pertama pencarian perhitungan atas semua skala dan lokasi gambar. Hal ini diimplementasikan secara efisien dengan menggu-nakan fungsi difference-of-Gaussian untuk mengidenti-fikasi titik-titik potensi yang invarian untuk skala dan orientasi.
2) Lokalisasi keypoint. Pada setiap kandidat lokasi, model dicocokan untuk menentukan lokasi dan skala. Keypoint dipilih berdasarkan ukuran stabilitas keypoint tersebut. 3) Orientation assignment. Satu atau lebih orientasi
ditugaskan untuk keypoint masing-masing lokasi berdasarkan arah gradien citra lokal. Operasi selanjutnya dilakukan pada data gambar yang telah berubah relatif terhadap orientasi ditetapkan, skala, dan lokasi untuk setiap fitur, sehingga memberikan invarian untuk transformasi ini.
4) Keypoint descriptor. Gradien gambar lokal diukur pada skala yang dipilih di wilayah sekitar keypoint masing-masing.
III. DESAINDANIMPLEMENTASISISTEM
A. Desain Sistem
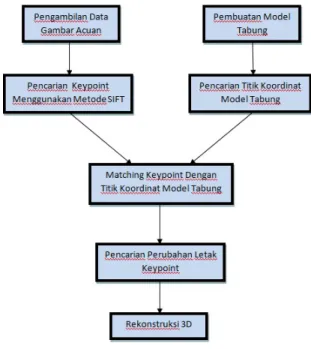
Desain sistem digambarkan secara sederhana seperti pada Gambar 3.
B. Implementasi Sistem
1) Pembuatan3D Cylindrical Model: Dalam penelitian ini model yang digunakan adalah 3D Cylindrical Model. Model ini berbentuk seperti manusia kayu. Bagian kepala, tangan,
Gambar 3: Desain sistem
badan, dan kaki model berbentuk silinder seperti batang kayu. Model ini dipilih karena memiliki tingkat presisi yang lebih tinggi dalam hal prediksi pergerakan manusia. Pembuatan model ini memanfaatkan software Blender. Gambar 2 meru-pakan contoh model yang akan dibuat nantinya.
2) Pencarian Titik-titik Vertex 3D Cylindrical Model: Setelah model berhasil dibentuk, perlu juga untuk dicari titik-titik vertex model tersebut. Titik-titik-titik ini nantinya digunakan untuk proses pemberian penanda kepada objek gambar model manusia.
3) Pengambilan Data Gambar Model Manusia: Pengambi-lan data gambar model manusia ini dilakukan dengan tujuan sebagai bahan input untuk proses rekonstruksi 3D nantinya. Proses pengambilan gambar dilakukan di sebuah ruang dengan warna background yang sama rata, sehingga memudahkan untuk proses selanjutnya. Dalam proses ini Objek manusia akan melakukan beberapa gerakan tangan dan kaki, sehingga dari ini semua, kita akan mendapatkan sample data gerakan manusia sebagai input data yang akan digunakan dalam peneli-tian ini. Pose awal dari objek diharuskan sama dengan pose awal model agar dapat dicari titik-titik persamaannya.
4) Pencarian Keypoint Menggunakan Metode SIFT: Metode Scale-invariant feature transform (SIFT) digunakan untuk mencari titik-titik ekstrim pada gambar manusia, yang disebut keypoint. Pada proses ini, metode SIFT dihentikan hanya sampai menemukan letak keypoint, tidak sampai men-cari descriptor. Keypoint dari gambar awal kemudian diband-ingkan dengan keypoint gambar selanjutnya untuk dicari letak-letak keypoint yang sama. Setelah itu keypoint-keypoint yang sama disimpan lokasinya, sedangkan yang berbeda dihapus. Gambar 4 merupakan contoh penggunaan SIFT.
5) Pencocokan Keypoint Dengan Titik-titik Vertex Model 3D: Keypoint-keypointyang sudah didapat pada gambar model manusia kemudian akan dicocokkan dengan titik-titik vertex
Gambar 4: Contoh SIFT
model 3D. Keypoint yang berdekatan dengan titik-titik vertex dari model 3D akan disimpan. Sedangkan keypoint yang sama sekali tidak bersinggungan maupun berdekatan dengan salah satu titik vertex model 3D akan dihapus. Keypoint-keypoint yang sudah match selanjutnya diberi tanda khusus. Hal ini bertujuan untuk memberi penanda pada gambar model manusia, sebagai pengganti penanda yang terdapat pada sistem penangkap gerak manusia dengan penanda.
6) Pencarian Perubahan Posisi Keypoint: Keypoint yang sudah didapat, nantinya akan dicari pasangannya pada gam-bar selanjutnya. Dengan begitu, akan didapat posisi keypoint pada gambar selanjutnya. Perubahan posisi keypoint ini akan digunakan untuk merubah pose model tabung sesuai dengan perubahan pose pada gambar acuan.
7) Rekonstruksi 3D: Setelah gambar model manusia diberi penanda hasil dari proses pencocokan keypoint dan titik-titik koordinat model 3D, maka proses berikutnya adalah mem-bangkitkan bentuk dan pose manusia dengan menggunakan 3D Cylindrical Model. Data-data yang didapat dari data gambar model manusia, kemudian diproses sehingga dapat digunakan untuk menentukan pose model 3D.
IV. PENDUJIANDANANALISA
Proses pengujian dilakukan pada komputer dengan spesifikasi sebagai berikut :
Tabel I: Spesifikasi Sumber Daya untuk Pengujian
Komponen Spesifikasi
Processor AMD Turion(tm) X2 Dual-Core RM-70 ~ 2.0 GHz
Memory 2046MB RAM
VGA ATI Mobility Radeon HD 3450 256 MB Sistem Operasi Windows Vista Home Premium
A. Pembuatan Model 3D
Pada proses ini dibentuk sebuah model manusia 3D berben-tuk seperti manusia kayu. proses pembuatan memanfaatkan program Blender 2.49. Hasilnya dapat dilihat seperti pada gambar 5.
Model ini dipilih selain karena bentuknya yang sederhana juga karena memiliki tingkat akurasi yang tinggi dalam hal rekonstruksi 3D. Pada model tabung ini, tiap bagian tubuh manusia direpresentasikan oleh sebuah tabung. Setiap tabung
Gambar 5: 3D Cylindrical Model
satu dengan lainnya dibuat terpisah untuk merepresentasikan persendian pada tubuh manusia.
B. Pencarian Titik-titik Vertex Model 3D
Setelah model 3D sudah berhasil dibentuk, berikutnya adalah pencarian titik-titik vertex dari model 3D. Untuk tahap ini, digunakan software Autocad 2004 untuk mencari titik-titiknya. Model yang dibentuk melalui blender terlebih dahulu dikonvert agar dapat dibuka melalui Autocad. Setelah itu, model 3D dipecah menjadi titik-titik, sehingga dapat dilacak letak koordinatnya.
Titik-titik yang didapat kemudian diproses melalui software Matlab untuk diplot letaknya pada sistem koordinat kartesian. Pada model yang digunakan pada penelitian ini, didapat 822 titik yang membentuknya. Gambar 6 menunjukkan titik-titik yang berhasil didapat.
Gambar 6: Titik-titik Koordinat Model 3D
C. Pengambilan Data Gambar Manusia
Pada penelitian ini dibatasi penangkapan gambar pose manusia hanya dilakukan dari satu sudut pandang kamera saja, yakni dari depan model. Pose awal dari model harus sama dengan pose model 3D. Hal ini agar memudahkan proses pencocokan nantinya.
Dikarenakan sulitnya mencari ruang dengan background yang homogen, maka pada penelitian ini akan digunakan sebuah gambar model manusia 3D dengan berbagai macam pose dimana background gambar telah homogen. Gambar 7 menunjukkan beberapa contoh gambar pose manusia yang digunaan pada penelitian ini.
Gambar 7: Pose Model Manusia yang Digunakan
D. Pencarian Keypoint
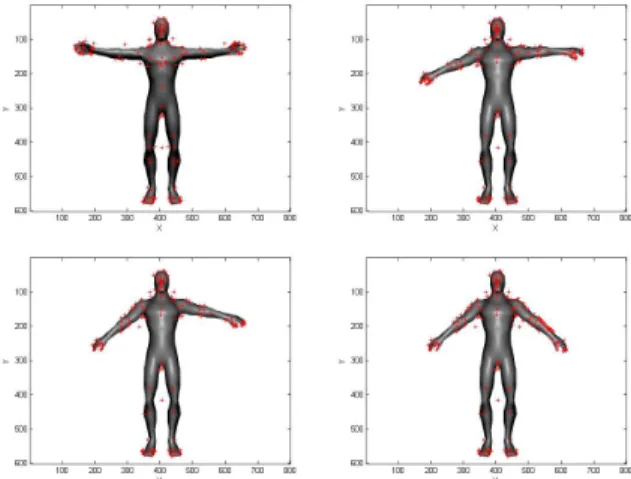
Proses selanjutnya adalah pencarian keypoint menggunakan metode scale-invariant feature transform (SIFT). Gambar-gambar pada pose-pose yang sudah didapat dan diproses pada bagian sebelumnya, dicari letak keypoint-keypoint pa-da gambar-gambar tersebut. Setelah proses pencarian key-point dengan menggunakan metode SIFT dilakukan, langkah berikutnya adalah mencocokkan masing-masing keypoint pada pose 1 dengan pose-pose yang lain. Gambar 8 menunjukkan beberapa contoh gambar hasil pencarian keypoint pada model manusia.
Gambar 8: Letak keypoint pada model manusia
E. Pencocokan Keypoint Dengan Titik-titik Vertex Model 3D Proses berikutnya adalah pencocokan keypoint pada gambar model manusia dengan titik koordinat model 3D. Hal ini dilakukan untuk memberikan penanda pada model manusia sebagai ganti penanda pada sistem penangkap gerak dengan penanda. Tahap ini dilakukan dengan cara mencari titik-titik pada model 3D yang berdekatan atau sama posisi dengan keypoint pada model manusia. Setelah didapat titik-titik yang deat, maka titik tersebut dikunci posisinya dengan keypoint dari model manusia. Oleh karena itu, apabila pada gambar pose pembanding didapat adanya perubahan pada keypoint, maka titik-titik pada model 3D yang sudah sesuai tersebut akan ikut berubah posisinya. Gambar 9 merupakan pencocokan keypointdengan titik-titik koordinat model 3D.
F. Pencarian Perubahan Posisi Keypoint
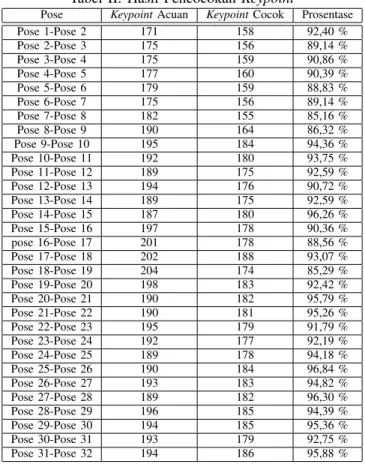
Pada tahap ini, setiap keypoint yang didapat pada gambar acuan, akan dicocokkan dengan keypoint pada gambar-gambar perubahan pose. Tabel 2 menunjukkan jumlah keypoint yang cocok pada setiap perubahan pose. Dari hasil pencocokan tersebut, didapat rerata hasil pencocokan tiap pose sebesar 174,81 atau dapat dibulatkan menjadi 175 keypoint.
Tabel II: Hasil Pencocokan Keypoint
Pose KeypointAcuan KeypointCocok Prosentase
Pose 1-Pose 2 171 158 92,40 % Pose 2-Pose 3 175 156 89,14 % Pose 3-Pose 4 175 159 90,86 % Pose 4-Pose 5 177 160 90,39 % Pose 5-Pose 6 179 159 88,83 % Pose 6-Pose 7 175 156 89,14 % Pose 7-Pose 8 182 155 85,16 % Pose 8-Pose 9 190 164 86,32 % Pose 9-Pose 10 195 184 94,36 % Pose 10-Pose 11 192 180 93,75 % Pose 11-Pose 12 189 175 92,59 % Pose 12-Pose 13 194 176 90,72 % Pose 13-Pose 14 189 175 92,59 % Pose 14-Pose 15 187 180 96,26 % Pose 15-Pose 16 197 178 90,36 % pose 16-Pose 17 201 178 88,56 % Pose 17-Pose 18 202 188 93,07 % Pose 18-Pose 19 204 174 85,29 % Pose 19-Pose 20 198 183 92,42 % Pose 20-Pose 21 190 182 95,79 % Pose 21-Pose 22 190 181 95,26 % Pose 22-Pose 23 195 179 91,79 % Pose 23-Pose 24 192 177 92,19 % Pose 24-Pose 25 189 178 94,18 % Pose 25-Pose 26 190 184 96,84 % Pose 26-Pose 27 193 183 94,82 % Pose 27-Pose 28 189 182 96,30 % Pose 28-Pose 29 196 185 94,39 % Pose 29-Pose 30 194 185 95,36 % Pose 30-Pose 31 193 179 92,75 % Pose 31-Pose 32 194 186 95,88 %
Dari hasil pencocokan, didapat prosenentase hasil penco-cokan keypoint sebesar 92,19 %. Pencopenco-cokan keypoint ini merupakan proses untuk menentukan perubahan dari pose manusia pada gambar. Perubahan pose tersebut dapat diketahui dari perubahan posisi keypoint-keypoint pada gambar acuan. Hasil dari pencocokan ini akan digunakan untuk menentukan perubahan pose pada model tabung.
G. Rekonstruksi 3D
Dari hasil pemetaan titik-titik koordinat pada model 3D yang sudah berubah posisinya, maka langkah selanjutnya adalah merekonstruksi model tabung sesuai dengan perubahan
estimasi pose dari gambar pose 25. Dapat dilihat bahwa yang menjadi acuan adalah gambar pose sebelumnya, yaitu gambar pose 24. Gambar 11b merupakan bentuk pose sebelum dikenai perubahan pose berikutnya. Untuk mengetahui hasil estimasi dari setiap gambar pose, dapat merujuk ke bagian lampiran.
Setelah perubahan posisi keypoint didapat, maka langkah selanjutnya adalah mencari transformasi posisi dari keypoint tersebut, dalam hal ini rotasi. Besar sudut perubahan yang didapat akan digunakan untuk merubah posisi tabung pada bagian lengan. Dengan menggunakan cara ini, maka peruba-han pose pada model tabung dapat mengikuti perubaperuba-han pose pada gambar acuan.
(a) Hasil pencocokan keypoint
(b) Pose 1 (c) Hasil estimasi pose
Gambar 10: Hasil estimasi pose 2
(a) Hasil pencocokan keypoint
(b) Pose 24 (c) Hasil estimasi pose
Gambar 11: Hasil estimasi pose 25
Pada hasil penelitian ini, didapat bahwa perkiraan pose manusia berbasis model tabung dapat dilakukan dengan meng-gunakan metode SIFT. Hal ini dapat dilihat dari hasil yang didapat, yaitu perubahan pose model tabung yang mengikuti perubahan pose gambar acuan. Hanya saja pada penelitian ini
Dari hasil perancangan dan pengujian seluruh sistem dalam penelitian ini maka dapat diambil beberapa kesimpulan :
1) Pada penelitian ini Perkiraan pose manusia berhasil dilakukan menggunakan 3D cylindrical model.
2) Metode SIFT dapat digunakan untuk memberi penanda pada model manusia sebagai ganti penanda aktif pada motion capture berbasis penanda.
3) Dengan menggunakan metode SIFT, didapat rata-rata jumlah keypoint sebesar 190 keypoint pada gambar acuan yang dipakai.
4) Pada setiap perubahan pose, didapat rata-rata jumlah keypoint yang berubah lokasi mencapai 92,19 % dari jumlah keypoint pada setiap pose.
B. Saran
Untuk pengembangan lebih lanjut, bersama ini disarankan hal - hal sebagai berikut :
1) Proses tracking dapat ditambahkan pada rekonstruksi ini sehingga dari input gambar itu dapat menghasilkan animasi 3D yang menyerupai gerakan manusia sesung-guhnya.
2) Pergerakan pada saat pengambilan sample pose manusia dibuat lebih bervariasi, seperti berjalan, berlari, melom-pat, dsb.
3) Background dengan warna yang homogen dapat mem-permudah proses pengenalan objek manusia.
4) Penambahan jumlah sudut pandang dapat mengopti-malkan proses perkiraan pose manusia menggunakan model 3D.
PUSTAKA
[1] Lowe, David G., “Distinctive Image Features From Scale-Invariant Key-points”, University of British Columbia, Canada, 5 Januari 2004. [2] Aggarwal, J.K., dan Q. Cai, "Human Motion Analysis: A review",
Computer Vision and Image Understanding”, Vol. 73, no.3, pp. 428-440, 1999.
[3] Budiman, R., Bennamoun, M. and Huynh, D.Q., “Low Cost Motion Capture, Image and Vision Computing”, New Zealand, Dunedin, The University of Western Australia, 2005.
[4] Moeslund, T.B., “The Analysis-by-Synthesis Approach in Human Motion Capture: A Review”, The 8th Danish conference on pattern recognition and image analysis, Copenhagen University, Denmark, 1999.
[5] Lowe, David G., “Object Recognition from Local Scale-Invariant Fea-tures”, University of British Columbia, Canada.
[6] Moeslund, T.B., A. Hilton, dan V. Kruger., “A Survey of Advances in Vision-based Human Motion Capture and Analysis”, Computer Vision and Image Understanding, 104, hal. 90-126., 2006
[7] Lowe, David G., “Demo Software: SIFT Keypoint Detector” <URL: <http://http://www.cs.ubc.ca/~lowe/keypoints/>> 4 Juli 2005.
Setelah lulus SMA, ia memilih untuk melanjutkan pendidikan tingginya di Jurusan Teknik Elektro, Fakultas Teknologi Industri ITS.
Saat di bangku kuliah, penulis aktif pada berbagai macam kegiatan kemahasiswaan diantaranya adalah Departemen Lingkar Kampus HIMATEKTRO 2007-2008, Sekretaris Umum HIMATEKTRO 2008-2009, asisten dosen di Lab-oratorium jaring Komputer dan Multimedia (Lab. B-201). Dari berbagai kegiatan tersebut, penulis akhirnya tertarik pada bidang-bidang teknologi informasi, utamanya motion capture dan sampai sekarang penulis aktif dalam bidang tersebut.