APLIKASI AUTOMATIC IDENTIFICATION SYSTEM (AIS)
UNTUK MENENTUKAN RISK COLLISION KAPAL
BERDASARKAN FUZZY INFERENCE SYSTEM
Emmy Pratiwi1, Ketut Buda Artana2, AAB Dinariyana2Putri Dyah Setyorini2
1Program Pascasarjana Teknologi Kelautan 2Jurusan Teknik Sistem Perkapalan Institut Teknologi Sepuluh Nopember
Abstrak: Alur pelayaran barat Surabaya (APBS) yang berlokasi di Selat Madura
merupakan salah satu alur pelayaran terpadat di Indonesia. Jumlah kapal di APBS yang semakin meningkat berbanding lurus dengan meningkatnya kecelakaan kapal seperti tubrukan kapal. Studi ini bertujuan untuk menilai risiko tubrukan kapal di jalur APBS dengan memanfaatkan data dari Automatic Identification System (AIS). AIS merupakan sistem tracking secara otomatis di kapal dan vessel traffic services (VTS) yang digunakan untuk mengidentifikasi dan mengetahui lokasi kapal melalui pertukaran data secara elektronik dengan kapal lain maupun dengan AIS base station di darat. Informasi yang diberikan oleh AIS dapat berupa data statis seperti tipe kapal, ukuran kapal data dinamis seperti posisi kapal, kecepatan dan status navigasi. Risiko tubrukan kapal dinilai berdasarkan dua parameter yaitu Closest Point of Approach (DCPA) dan Time to Closest Point of Approach (TCPA). Nilai DCPA dan TCPA dihitung dengan menggunakan data yang diperoleh dari AIS. Dua parameter ini selanjutnya diproses dalam fuzzy inference system untuk mendapatkan risiko tubrukan kapal. Dari hasil analisis risk collision pada tanggal 8 April 2015 pukul 13.00 WIB dan 03.00 WIB di buoy 10 menunjukkan bahwa terdapat pertemuan kapal yang memiliki risiko tubrukan yang cukup tinggi yakni 0,84 dimana menurut rule yang disampaikan oleh Chen (2014), nilai ini dapat dikategorikan dalam level High (H).
Kata kunci: AIS, risk collision, DCPA, TCPA, fuzzy inference system
PENDAHULUAN
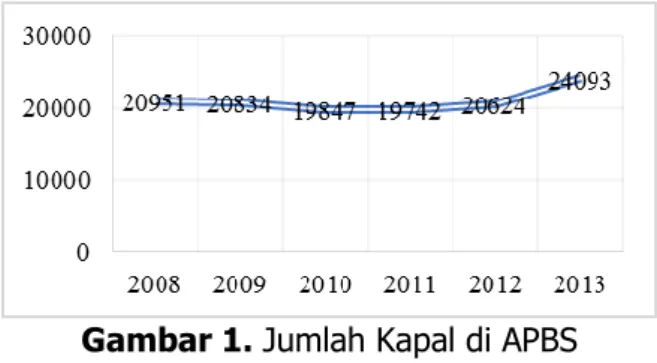
Alur pelayaran barat Surabaya (APBS) yang berlokasi di Selat Madura merupakan satu-satunya jalur untuk kapal-kapal yang akan masuk ke beberapa palabuhan besar seperti Pelabuhan Tanjuk Perak Surabaya dan Pelabuhan Teluk Lamong Gresik. Hal ini menyebabkan APBS menjadi salah satu alur pelayaran terpadat di Indonesia. Gambar 1 menunjukkan data statistik jumlah kunjungan kapal ke Surabaya dan Gresik melalui APBS berdasarkan informasi dari PT. Pelindo III.
Gambar 1. Jumlah Kapal di APBS
Data pada Gambar 1 tersebut menunjukkan bahwa setiap tahun hampir selalu terjadi kenaikan jumlah kunjungan kapal. Meningkatnya jumlah kunjungan kapal ternyata juga sebanding dengan meningkatnya jumlah kecelakaan kapal. Selama tahun 2005-2009, jumlah kecelakaan kapal di Indonesia cukup tinggi. Berdasarkan laporan dari Mahkamah Pelayaran, sekitar tidak kurang 293 khasus terjadi kecelakaan kapal (Mahkamah Pelayaran Indonesia, 2009). Kecelakaan tersebut dikategorikan menjadi beberapa yakni kapal tenggelam (31%), kapal kandas (25%), kapal tabrakan (18,27%), kapal terbakar (9,67%) dan lainnya sebesar 16,06%. Penyebab dari kecelakaan tersebut juga beragam namun penyebab terbesarnya adalah akibat
human
error
78,45%, penyebab lain seperti kesalahan teknis (9,67%), karena kondisi cuaca (1,07%,) dan 10,75% karena kombinasi cuaca dan kesalahan teknis (Artana, et al., 2012). Penyebab kecelakaan ini seperti yang tercantum pada Gambar 2 berikut.Gambar 2. Data Jenis Kecelakaan Kapal
Berdasarkan tingginya angka kecelakaan kapal akibat kesalahan manusia serta banyaknya korban yang meninggal dunia, maka studi tentang risiko adanya kecelakaan khusunya di alur pelayaran yang padat menjadi sangat penting sebagai upaya untuk meningkatkan keselamatan.
Pada studi ini, perhitungan risiko tubrukan kapal pada Selat Madura akan disajikan dengan mengembangkan dan memanfaatkan data
Automatic Identiication
System
(AIS).Risk collision
yang menunjukkan peluang kapal tersebut akan menubruk kapal lain dihitung dengan parameterClosest Point of Approach
(DCPA) danTime to
Closest Point of Approach
(TCPA) sebagaiinput
untuk logikafuzzy
.a.
Automatic Identification System (AIS)
Mulai pada tahun 2000,
International Maritime Organization
(IMO) merekomendasikan peraturan baru untuk kapal yang memilikigross tonnage
300 dan lebih wajib memasangAutomatic Identiication System
(AIS). AIS merupakan sistemtracking
secara otomatis di kapal danvessel traffic services
(VTS) yang digunakan untuk mengidentifikasi dan mengetahui lokasi kapal. AIS menggunakantransceiver
juga pada otoritas di daratan secara otomatis. Informasi yang diberikan oleh AIS dapat berupa data statis seperti nama kapal, tipe kapal, ukuran kapal, nomor registrasi IMO sedangkan data dinamis seperti posisi kapal,
heading
kapal,course over the ground
(COG) dan status navigasi.
Data AIS ini telah banyak digunakan dan dikembangkan oleh para peneliti seperti untuk estimasi gas buang kapal, peta navigasi, evakuasi kapal dan menentukan
dangerous score
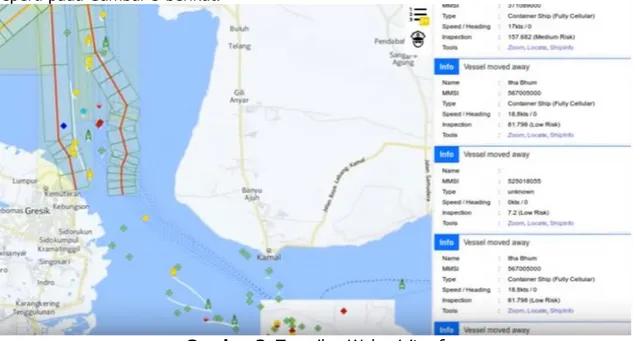
pada setiap kapal (Pitana, et al., 2010; Kobayashi, et al., 2010; Pitana, et al., 2008).Institut Teknologi Sepuluh Nopember (ITS) juga telah mengembangkan AIS menjadi suatu tampilan
web aisits.cf
untuk memonitoring kapal-kapal yang beroperasi di Selat Madura melaluireciever
yang terpasang di Laboratorium Keselamatan dan Keandalan, ITS. Dari web tersebut informasi kapal seperti nama, tipe dan ukuran kapal, status navigasi sertainspection
score dapat diketahui. Tampilan web tersebut seperti pada Gambar 3 berikut.Gambar 3. Tampilan Web
aisits.cf
b. Penentukan Risiko Tubrukan Kapal (Collision Risk)
Risiko tubrukan kapal atau
collision risk
ditentukan berdasarkan dua kriteria penting yaituClosest Point of Approach
(DCPA) danTime to Closest Point of Approach
(TCPA). DCPA adalah jarak terdekat antar dua kapal yang saling mendekati satu sama lain. TCPA merupakan waktu yang dibutuhkan untuk mencapai titik DCPA. DCPA dan TCPA dihitung berdasarkan posisi kapal dan sudut navigasinya.
Pada Gambar 4 menunjukkan hubungan antara
bearing own ship
dantarget ship
yang mempengaruhi perhitungan DCPA dan TCPA. Persamaan untuk mendapatkan nilai DCPA dan TCPA antar kapal O dan T dapat dihitung menggunakan persamaan 1 dan 2 berikut (Shen, et al., 2013):
(1) (2)
𝑉𝑜 merupakan
velocity own ship,
𝑉𝑡 adalahvelocity target ship.
Jarak antar kapal (D) juga harus dihitung terlebih dahulu. Pertemuan antar kapal ditunjukkan denganrelative bearing
dariown ship
(𝛼)danrelative bearing
daritarget ship
(𝛽).c.
Fuzzy Inference System
Fuzzy inference system
(FIS) adalah proses pemetaan dariinput
yang diberikan untuk mengetahuioutput
menggunakanfuzzy logic
. Proses tersebut melibatkanmembership functions, fuzzy logic operators
, danif-then rules
. Pada studi ini,fuzzy
inference system
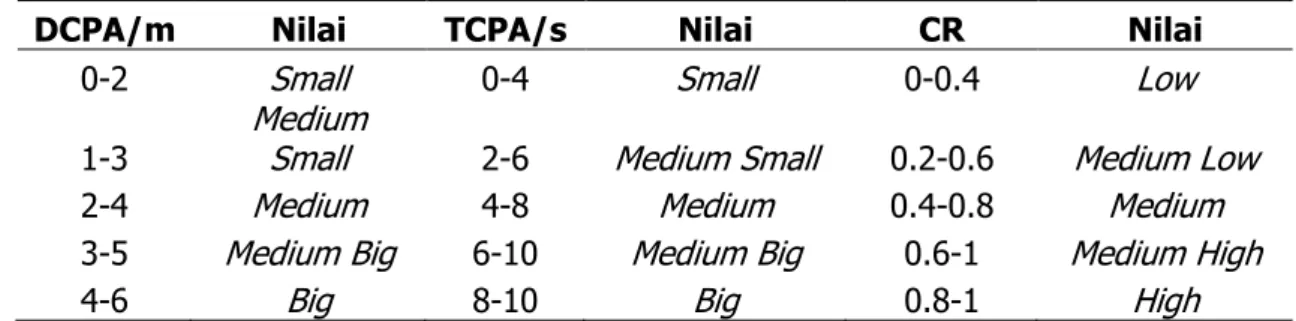
digunakan untuk pendekatan perhitungan risiko tubrukan. Tabel 1 memberikan lima nilai linguistik untuk variabel TCPA, DCPA, danCollision Risk
(C). Tabel 1. Lima nilai linguistik untuk variabel TCPA, DCPA, danRisk Collision
(Chen , et al., 2014)
DCPA/m Nilai TCPA/s Nilai CR Nilai
0-2
Small
0-4Small
0-0.4Low
1-3
Medium
Small
2-6Medium Small
0.2-0.6Medium Low
2-4
Medium
4-8Medium
0.4-0.8Medium
3-5
Medium Big
6-10Medium Big
0.6-1Medium High
4-6
Big
8-10Big
0.8-1High
Tabel 2 menunjukan
rules
yang digunakan untuk menentukan level risiko tubrukan kapal. Contohnya apabila nilai DCPA berada pada levelsmall
(S) dan TCPA juga berada pada levelsmall
(S), makacollision risk
(CR) berada kategoriHigh
(H). Tabel 2.Rules
untuk Nilai CR (Chen , et al., 2014)CR DCPA S M MS MB B TCPA S H H MH MH MH MS H MH M M M MS MH M M ML ML MB MH M ML ML L B MH M ML L L
METODE PENELITIAN
Penelitian ini merupakan suatu aplikasi dari peralatan
Automatic Identification
System
(AIS) sebagai suatu sistem monitoring untuk meningkatkan keselamatan pelayaran pada kapal-kapal yang melewati jalur padat yakni Alur Pelayaran Barat Surabaya. AIS yang terpasang di kapal berfungsi untuk menyediakan informasi kapal-kapal di APBS kepada kapal-kapal lain dan juga pada otoritas di daratan secara otomatis.Receiver
atau penerima data AIS yang digunakan pada penelitian telah terpasang di Laboratorium Keandalan dan Keselamatan, Jurusan Teknik Sistem Perkapalan, ITS.Untuk mendapatkan hasil akhir berupa nilai
collision risk
kapal-kapal di APBS, terdapat beberapa tahapan mulai dari proses pengambilan data dari AIS, mengolah atau mengubah data tersebut sehingga siap untuk digunakan, merumuskan data-data kedalam suatu persamaan untuk memperolehrisk collision.
Data yang dibutuhkan antara lain nama kapal,longitude, latitude
,Speed Over Ground
,Course Over Ground
dan UTC (
Universal Time Coordinated
). Kemudian data tersebut akan diproses untuk memperoleh nilai DCPA dan TCPA. Kedua paramater merupakan input darifuzzy
inference system
untuk memperolehrisk collision
. Untuk menyelesaikan logikafuzzy
, pada studi ini menggunakan bantuan MATLAB.HASIL DAN PEMBAHASAN
Berdasarkan data yang didapatkan dari AIS selama satu tahun yakni 2015 menunjukkan bahwa kepadatan kapal di alur yang tertinggi terjadi pada bulan April. Namun pada penelitian ini, analisis risiko tubrukan kapal hanya dilakukan pada tanggal 8 April 2015 pukul 03.00 WIB dan 13.00 WIB. Pada jam tersebut merupakan waktu terpadat kapal berada di alur. Kapal-kapal yang sedang beroperasi pada waktu tersebut terlihat pada Gambar 5 berikut.
Gambar 5. Kapal-kapal di Buoy 10 APBS pada 8 April 2015 pukul 03.00 WIB dan 13.00 WIB
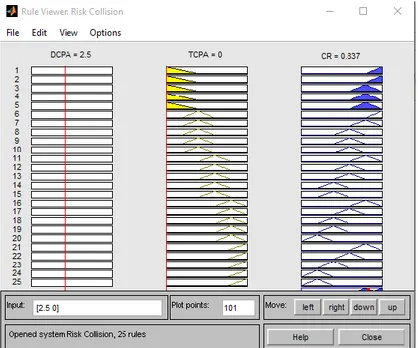
Gambar 6 menunjukkan contoh dari salah satu
encounter
yang telah dilakukanfuzzy inference system
dengan MATLAB. Dimana dengan bantuan MATLAB didapatkanGambar 6.
Fuzzy Inference System
dengan MATLABMasing-masing
encounter
akan dilakukan perhitungan seperti pada Gambar 6 Sehingga pada Tabel 3 didapatkan hasil perhitungan seluruhencounter
denganfuzzy
untuk mendapatkan nilai
collision risk
pada pertemuan antar kapal berdasarkan parameter DCPA dan TCPA.Tabel 3.
Risk Collision
Tiap Pertemuan KapalNo Encounter D (m) α β (m/s) Vo Vt Vr DCPA TCPA Collision Risk Level
1 Encounter 1 23,24 59,07 117,28 3,70 3,09 4,72 2,50 -4,79 0,84 H 2 Encounter 2 158,35 28,44 151,79 5,04 5,35 5,98 96,31 -9,10 0,84 H 3 Encounter 3 152,31 19,42 156,32 5,35 3,70 6,86 7,19 23,26 0,50 ML 4 Encounter 4 91,01 48,43 120,06 3,45 5,56 5,22 2,60 11,46 0,50 ML 5 Encounter 5 93,44 15,22 162,68 5,35 4,94 5,20 10,50 -3,03 0,63 MH 6 Encounter 6 79,60 40,72 134,57 5,50 5,61 9,50 28,75 -9,12 0,84 H 7 Encounter 7 25,70 26,20 154,34 3,70 3,70 4,07 11,22 -2,49 0,84 H KESIMPULAN
Berdasarkan hasil analisis yang dilakukan pada studi ini, data yang diterima dari
Automatic Identification System
(AIS) dapat dimanfaatkan untuk menilai risiko tubrukan dari kapal. Dengan menggunakan parameter DCPA dan TCPA,risk collision
dihitung dengan
fuzzy inference system.
Dari hasil analisis nilairisk collision
pada tanggal 8 April 2015 pukul 03.00 WIB dan 13.00 WIB dibuoy
10 menunjukkan bahwaterdapat beberapa
encounter
atau pertemuan kapal yang memiliki risiko tubrukan kapal tinggi yakni 0,84. Dimana berdasarkanrules
yang digunakan, nilai 0,84 termasuk dalam kategoriHigh
(H). Nilaicollision risk
yang tinggi ini bisa disebabkan karena posisi kedua kapal sehingga jarak antar kedua kapal tersebut berdekatan dan juga sudutheading
kapal yang mengarah ke titik yang dapat terjadicollision.
DAFTAR PUSTAKA
Artana, K. B., Dinariyana, D. P. & Pitana, T., 2012.
Pengembangan Perangkat Simulasi
Marine Traffic Melalui Integrasi Automatic Identification System dan Geographical
Information System.
s.l., InSINas.Chen , S., Rashid, . A., Lee, B. G. & Kim, D. H., 2014. Composition ship collision risk based on fuzzy theory.
Central South University Press and Springer-Verlag Berlin
Heidelberg.
Kobayashi, E. et al., 2010. Installation of an Asian AIS data receiving system network. Pitana, T. et al., 2008. A large passenger ship evacuation assessment due to Tsunami
Attack.
Journal of the Japan Society of Naval Architects and Ocean Engineers
(JASNAOE),
Volume 8, pp. 195-207.Pitana, T., Kobayashi, E. & Wakabayashi, N., 2010. Estimation Of Exhaust Emission Of Marine Traffic Using Automatic Identification System Data (Case Study : Madura Strait Area, Indonesia ).
OCEANS 2010 LEEE Sydney 24-27 May 2010, CFP100CF
– CDR 978-1-4244-5222 Library Of Congress : 2009934926.
Shen, Guangwei, M., Koji , H. & Yuji, 2013. A Study on Alarm System for Small Ship Safety Navigation in Ningbo-Zhoushan Port.