BAB II
TINJAUAN PUSTAKA
2.1 Teori Umum
Pada penulisan ini akan dibahas teori yang berhubungan langsung dengan instrumentasi dalam perancangan ”Sistem Mengukur Kecepatan Dan Arah Angin” yang meliputi perangkat keras dan perangkat lunak yaitu antara lain : teori angin, anemometer, Mikrokontroller Atmega 16A, sensor proximity dan Programnnya.
2.2 Angin
Menurut Ance Gunarsih Kartasapoetra, Angin merupakan gerakan atau perpindahan massa udara dari satu tempat ke tempat lain secara horizontal. Massa udara adalah udara dalam ukuran yang sangat besar yang mempunyai sifat fisik (temperatur dan kelembapan) yang seragam dalam arah yang horizontal.Gerakan angin berasal dari daerah yang bertekanan tinggi ke daerah yang bertekanan rendah. Angin juga mempunyai arah dan kecepatan. Arah angin dilihat dari mana arah angin itu datang, misalnya dari barat disebut angin barat.
Angin adalah gerak nisbi terhadap permukaan bumi. Gerak atmosfer terhadap permukaan bumi ini memiliki dua arah yaitu arah horizontal dan arah vertikal. Kedua gerak atmosfer ini disebabkan oleh ketidaksetimbangan radiasi bersih, kelembaban dan momentum di antara lintang rendah dan lintang tinggi di satu pihak dan di antara permukaan bumi dan atmosfer di pihak lain.
Adapun faktor-faktor yang mempengaruhi gerak atmosfer itu sendiri yaitu topografi, distribusi antara permukaan daratan dan lautan, serta arus laut,Gerak
atmosfer yang umum adalah gerak horizontal, karena daerah yang diliputinya jauh lebih luas dan kecepatan horizontalnya jauh lebih besar daripada vertikalnya. Akan tetapi yang merupakan sumber pembentukan awan konvektif dan curahan yang berperan penting dalam menentukan cuaca dan iklim adalah gerak vertikal. Perubahan cuaca di atas permukaan bumi pada dasarnya adalah hasil dari gerak atmosfer atau gerak udara.yaitu gerak yang dihasilkan oleh berbagai gaya yang bekerja pada paket udara.
2.3 Anemometer
Anemometer adalah alat yang digunakan untuk mengukur arah dan kecepatan angin. Umumnya pengamatan angin permukaan (horizontal wind
speed) adalah rata-rata pengamatan selama periode 10 s/d 60 menit sesuai dengan kebutuhan Forecast. Statistik klimatologi biasanya memerlukan data rata-rata pengamatan untuk setiap jam, rata-rata periode siang hari dan periode malam hari. Untuk laporan sypnotic pengamatan dilakukan dalam rata-rata 10 menit.
Satuan meteorologi dari kecepatan angin adalah Knots (Skala Beaufort). Sedangkan satuan meteorologi dari arah dan mata angin adalah 0 –360 . Anemometer harus ditempatkan di daerah terbuka. Alat ini juga dapat digunakan untuk mengukur kecepatan angin dalam satuan m/s, km/jam, mil/jam, knots.
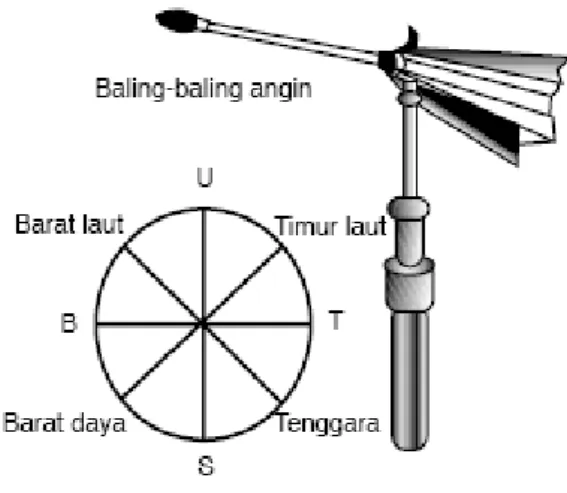
Agar dapat membandingkan pengamatan angin yang dilakukan di berbagai tempat, maka pemasangan anemometer dan vane tidak boleh sesukanya. Alat ini dipasang tinggi yang sama di atas tanah terbuka. Tanah terbuka adalah lapangan dengan benda (Pohon, rumah, dll) yang berjarak 10 kali lebih tinggi benda itu dari tiang anemometer. Tinggi yang telah di setujui adalah 10 meter. Arah angin
diukur dengan wind vane. Kecepatan angin diukur dengan wind speed anemometer.
Gambar 2.1 :Baling Baling untuk menentukan arah angin Hubungan antara masing-masing satuan ini adalah:
1. 6.28 m/s = 22.08 km/jam =2.25 mil/jam. 2. 1 m/s = 3.6 km/jam = 2 knots.
3. 1 km/jam = 10.36 m/s = 0.62 mil/jam. 4. 1 mil/jam = 0.447 m/s = 1.6 km/jam. 5. 1 knots = 0.5 m/s = 1.8 km/jam.
2.3.1 Prinsip Kerja Anemometer
Angin mengadakan tekanan yang kuat pada bagian tekanan yang kuat pada baling-baling yang berbentuk cekung (mangkuk). Bagian yang cekung akan berputar ke satu arah. Poros yang berputar dihubungkan dengan dynamo kecil. Bila baling-baling berputar maka terjadi arus listrik yang besarnya sebanding dengan kecepatan putaran. Besarnya arus listrik dihubungkan dengan
galvanometer yang telah ditera dengan satuan kecepatan dalam knots, m/s, km/h dan beaufort.
2.4 Sensor
Sensor adalah suatu peralatan yang berfungsi untuk mendeteksi gejala – gejala atau sinyal – sinyal yang berasal dari perubahan suatu energi seperti energi listrik, energi fisika, energi kimia, energi biologi, energi mekanik dan sebagainya.
Suatu peralatan yang memberitahukan kepada sistem kontrol tentang apa yang sebenarnya terjadi dinamakan sensor atau juga dikenal sebagai transduser. Sebagai contoh tubuh manusia mempunyai sistem sensor luar biasa yang memberitahukan kepada otak manusia secara terus menerus dengan gambar – gambar yang layak dan lengkap di sekitar lingkungan. Untuk sistem kontrol si pembuat harus memastikan parameter apa yang dibutuhkan untuk dimonitor sebagai contoh : posisi, temperatur, dan tekanan, kemudian tentukan sensor dan rangkaian data interface untuk melakukan perkerjaan ini. Sebagai contoh, kita ingin mengukur aliran cairan dalam suatu pipa dengan menggunakan flowmeter, atau kita ingin mengukur aliran secara tidak langsung dengan melihat seberapa lama cairan mengisi suatu tangki dengan ukuran tertentu.
Kebanyakan sensor bekerja dengan mengubah beberapa parameter fisik seperti temparatur atau posisi ke dalam sinyal listrik. Ini sebabnya mengapa sensor juga dikenal sebagai transduser yaitu suatu peralatan yang mengubah energi dari satu bentuk ke bentuk yang lain.
Sensor biasanya dikategorikan melalui pengukur dan memegang peranan penting dalam pengendalian proses pabrikasi modern.,sensor memberikan ekivalen otomatisasi industri.
2.4.1 Proximity
Sensor Proximity merupakan alat sensor yang digunakan untuk membedakan antara garis hitam dengan lantai putih. Sensor proximity ini dapat dikalibrasi untuk menyesuaikan pembacaan sensor terhadap kondisi pencahayaan ruangan. Sehingga pembacaan sensor selalu akurat. sensor ini biasanya kebanyakan di gunakan pada robot robot tipe Robot Line Tracker.
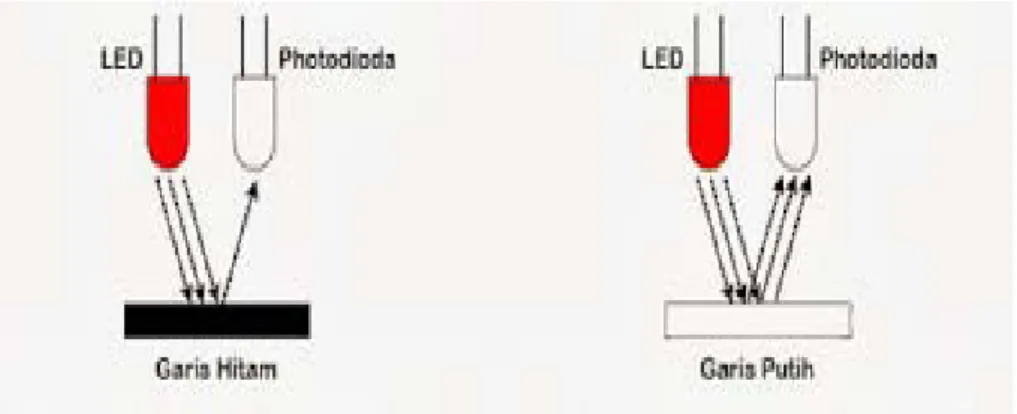
Sensor proximity bisa juga dibuat sendiri. Prinsip kerjanya sederhana, hanya memanfaatkan sifat cahaya yang akan dipantulkan jika mengenai benda berwarna terang dan akan diserap jika mengenai benda berwarna gelap. Sebagai sumber cahaya kita gunakan LED (Light Emiting Diode) yang akan memancarkan cahaya merah. Dan untuk menangkap pantulan cahaya LED, kita gunakan photodiode. Jika sensor berada diatas garis hitam maka photodioda akan menerima sedikit sekali cahaya pantulan. Tetapi jika sensor berada diatas garis putih maka photodioda akan menerima banyak cahaya pantulan. Berikut adalah ilustrasinya :
Gambar 2.2. Prinsip Kerja Sensor Proximity
Sifat dari photodioda adalah jika semakin banyak cahaya yang diterima, maka nilai resistansi diodanya semakin kecil. Dengan melakukan sedikit modifikasi, maka besaran resistansi tersebut dapat diubah menjadi tegangan. Sehingga jika sensor berada diatas garis hitam, maka tegangan keluaran sensor akan kecil, demikian pula sebaliknya.
Agar dapat dibaca oleh mikrokontroler, maka tegangan sensor harus disesuaikan dengan level tegangan TTL yaitu 0 – 1 volt untuk logika 0 dan 3 – 5 volt untuk logika 1. Hal ini bisa dilakukan dengan memasang operational amplifier yang difungsikan sebagai komparator. Output dari photodioda yang masuk ke input inverting op-amp akan dibandingkan dengan tegangan tertentu dari variable resistor VR. Tegangan dari VR inilah yang kita atur agar sensor proximity dapat menyesuaikan dengan kondisi cahaya ruangan.
2.4.2. Photodioda
Photodioda merupakan sebuah dioda dengan sambungan pn yang dipengaruhi cahaya di dalam kerjanya. photodioda digunakan sebagai penangkap gelombang cahaya yang dipancarkan oleh infrared. Besarnya tegangan atau arus listrik yang
dihasilkan oleh photodiode tergantung besar kecilnya radiasi yang dipancarkan oleh infrared.
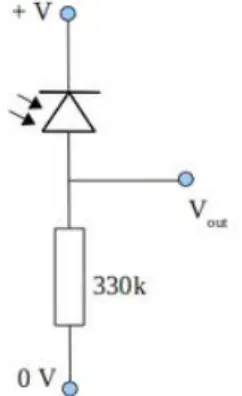
Sebuah photodioda dapat dijabarkan sebagai sumber arus terkendali cahaya, atau sebagai konverter cahaya ke arus, apabila diinginkan. Jika cahaya jatuh mengenai permukaan peka cahaya pada photodioda akan timbul sedikit arus dari katoda ke anoda yang besarnya sebanding dengan kuat cahaya yang melaluinya. Berikut gambar rangkaian photodiode ditunjukkan pada gambar 2.3 :
Gambar 2.3 rangkaian photodiode
Anoda pada sebuah dioda yang tidak terhubung akan semakin positif dari katoda sampai tegangan pada kedua terminal tersebut menyebabkan diode ke katoda, dalam keadaan seimbang. Kedua arus ini saling meniadakan dan akan muncul tegangan pada dioda. Bila tegangan bias mundur pada photodioda itu dihilangkan, pembawa muatan minoritas akan mengalir kembali jika hubungan disinari. Ini mengakibatkan kenaikan jumlah hole pada bagian P dan jumlah elektron pada bagian N. Tetapi tegangan barier adalah negatif pada bagian P dan positif pada bagian N. sehingga pembawa minoritas akan mengalir untuk mengurangi tegangan barier itu. Bila ada tegangan luar dipasangkan pada terminal
dioda maka pembawa minoritas akan kembali ke bagian semula melalui rangkaian luar. Elektron-elektron melewati hubungan dari P ke N sekarang mengalir keluar melalui terminal N menuju ke terminal P.
2.4.3 LED
LED (Light Emitting Dioda) adalah dioda yang dapat memancarkan cahaya pada saat mendapat arus bias maju (forward bias). LED dapat memancarkan cahaya karena menggunakan dopping galium, arsenic dan phosporus. Jenis doping yang berbeda diata dapat menhasilkan cahaya dengan warna yang berbeda.
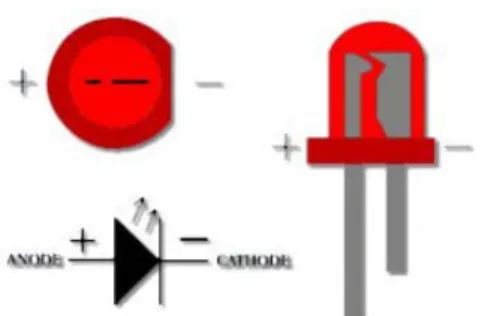
LED merupakann salah satu jenis dioda, sehingga hanya akan mengalirkan arus listrik satu arah saja. LED akan memancarkan cahaya apabil diberikan tegangan listrik dengan konfigurasi forward bias. Berbeda dengan dioda pada umumnya, kemampuan mengalirkan arus pada LED cukup rendah yaitu maksimal 20 mA. Apabila LED dialiri arus lebih besar dari 20 mA maka LED akan rusak, sehingga pada rangkaian LED dipasang sebuah resistor sebagai pembatas arus. Simbol dan bentuk fisik dari LED dapat dilihat pada gambar berikut :
Dari gambar diatas dapat kita ketahui bahwa LED memiliki kaki 2 buah seperti dengan dioda yaitu kaki anoda dan kaki katoda. Pada gambar diatas kaki anoda memiliki ciri fisik lebih panjang dari kaki katoda pada saat masih baru, kemudian kaki katoda pada LED ditandai dengan bagian body LED yang di papas rata. Kaki anoda dan kaki katoda pada LED disimbolkan seperti pada gambar diatas. Pemasangan LED agar dapat menyala adalah dengan memberikan tegangan bias maju yaitu dengan memberikan tegangan positif ke kaki anoda dan tegangan negatif ke kaki katoda. Konsep pembatas arus pada dioda adalah dengan memasangkan resistor secara seri pada salah satu kaki LED.
2.5 Mikrokontroler ATMega 16A
Gambar 2.5 Mikrokontroler ATmega 16A
ATmega16A adalah sebuah CMOS 8-bit mikrokontroler berbasis AVR dengan arsitektur RISC. AVR dapat mengeksekusi sebuah instruksi dengan 1 siklus clock, sehingga ATmega16A dapat mencapai sekitar kecepatan eksekusi 1 MIPS per Hz. Oleh karena itu ATmega16A mengoptimisasi konsumsi daya VS kecepatan pemroses.
ATmega16A memiliki fungsi yang sebagian besar sama dengan ATmega16. Perbedaan antara kedua piranti ini terdapat pada “Electrical Characteristics” dan “Typical Characteristics”, dimana ATmega16A memiliki karakteristik yang lebih baik, salah satunya adalah dapat digunakan pada supply tegangan yang lebih lebar, yaitu pada 2.7 sampai 5.5 V. Selain itu ATmega16A juga memiliki konsumsi daya yang lebih rendah daripada ATmega16.
Berikut adalah beberapa fitur dari ATmega16A : 1. Advanced RISC architecture.
2. Memori flash (Program) dengan kapasitas hingga 16KB dengan ketahanan 1000 kali penulisan.
3. Memori EEPROM berkapasitas 512B dengan ketahanan 100.000 kali penulisan.
4. Memori SRAM dengan kapasitas 1KB. 5. Independen Lock Bit.
6. Pengunci untuk keamanan data terprogram. 7. Antarmuka JTAG.
8. Dua buah 8 bit counter/ timer dengan prescaler dan mode pembanding. 9. Satu buah 16 bit counter/ timer dengan prescaler, mode pembanding dan
mode capture.
10. Real Time Counter dengan on-chip oscillator terpisah. 11. 4 kanal PWM.
12. 8 kanal 10-bit ADC. 13. TWI.
15. Maser/slave SPI.
16. Programmable Watchdog timer dengan on-chip oscillator terpisah. 17. Power-on reset dan programmableBrown-out detection.
18. Internal RC Oscillator terkalibrasi. 19. Internal dan eksternal Interrupt. 20. 6 mode sleep.
21. 32 Programmable I/O.
22. Tegangan operasi 2.7 – 5.5 V.
23. Speed grades dengan range 0 – 16 MHz.
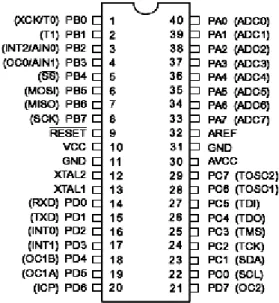
Gambar 2.6 Pin-Pin ATMega 16A Kemasan 40 Pin
Pin-pin pada ATMega16 dengan kemasan 40-pin DIP (dual inline package) ditunjukkan oleh gambar 2.. Guna memaksimalkan performa, AVR menggunakan arsitektur Harvard (dengan memori dan bus terpisah untuk program dan data). Port sebagai input/output digital ATMega16 mempunyai empat buah port yang bernama PortA, PortB, PortC, dan PortD. Keempat port tersebut merupakan jalur
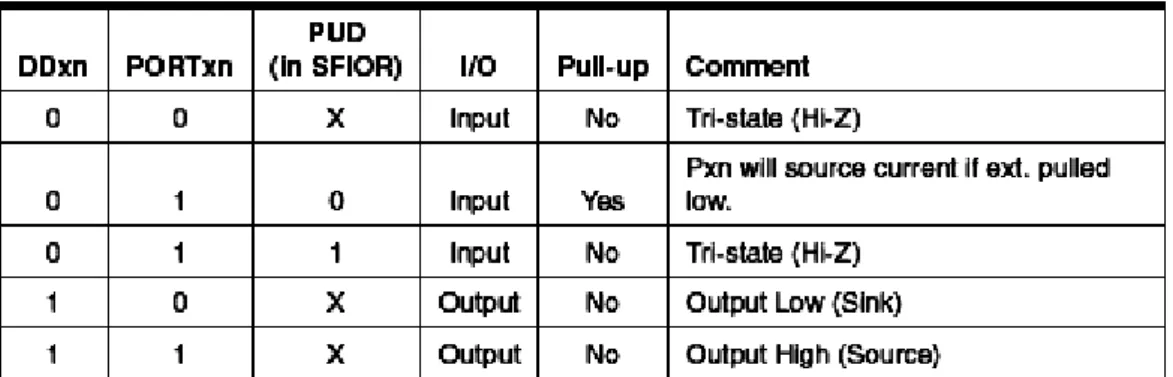
register bit, yaitu DDxn, PORTxn, dan PINxn. Huruf ‘x’mewakili nama huruf dari port sedangkan huruf ‘n’ mewakili nomor bit. Bit DDxn terdapat pada I/O address DDRx, bit PORTxn terdapat pada I/O address PORTx, dan bit PINxn terdapat pada I/O address PINx. Bit DDxn dalam register DDRx (Data Direction Register) menentukan arah pin. Bila DDxn diset 1 maka Px berfungsi sebagai pin output. Bila DDxn diset 0 maka Px berfungsi sebagai pin input. Bila PORTxn diset 1 pada saat pin terkonfigurasi sebagai pin input, maka resistor pull-up akan diaktifkan. Untuk mematikan resistor pull-up, PORTxn harus diset 0 atau pin dikonfigurasi sebagai pin output. Pin port adalah tri-state setelah kondisi reset. Bila PORTxn diset 1 pada saat pin terkonfigurasi sebagai pin output maka pin port akan berlogika 1. Dan bila PORTxn diset 0 pada saat pin terkonfigurasi sebagai pin output maka pin port akan berlogika 0. Saat mengubah kondisi port dari kondisi tri-state (DDxn=0, PORTxn=0) ke kondisi output high (DDxn=1, PORTxn=1) maka harus ada kondisi peralihan apakah itu kondisi pull-up enabled
(DDxn=0, PORTxn=1) atau kondisi output low (DDxn=1, PORTxn=0). Biasanya, kondisi pull-up enabled dapat diterima sepenuhnya, selama lingkungan impedansi tinggi tidak memperhatikan perbedaan antara sebuah strong high driver dengan sebuah pull-up. Jika ini bukan suatu masalah, maka bit PUD pada register SFIOR dapat diset 1 untuk mematikan semua pull-up dalam semua port. Peralihan dari kondisi input dengan pull-up ke kondisi output low juga menimbulkan masalah yang sama. Harus menggunakan kondisi tri-state (DDxn=0, PORTxn=0) atau kondisi output high (DDxn=1, PORTxn=0) sebagai kondisi transisi.
Tabel 2.1 Konfigurasi Pin Port Serial pada ATMega16
Universal synchronous dan asynchronous pemancar dan penerima serial adalah suatu alat komunikasi serial sangat fleksibel.
Jenis yang utama adalah :
1. Operasi full duplex (register penerima dan pengirim serial dapat berdiri sendiri)
2. Operasi Asychronous atau synchronous
3. Master atau slave mendapat clock dengan operasi synchronous
4. Pembangkit baud rate dengan resolusi tinggi
5. Dukung frames serial dengan 5, 6, 7, 8 atau 9 Data bit dan 1 atau 2 Stop bit 6. Tahap odd atau even parity dan parity check didukung oleh hardware
7. Pendeteksian data overrun
8. Pendeteksi framingerror
9. Pemfilteran gangguan (noise) meliputi pendeteksian bit false start dan pendeteksian low pass filter digital
10. Tiga interrupt terdiri dari TX complete, TX data register empty dan RX
complete.
12. Mode komunikasi double speed asynchronous
2.6. LCD (Liquid Crystal Display)
Gambar 2.7 LCD (Liquid Crystal Display)
Display elektronik merupakan salah satu komponen elektronika yang berfungsi sebagai tampilan suatu data, baik karakter, huruf ataupun grafik. LCD (Liquid Cristal Display) adalah salah satu jenis display elektronik yang dibuat dengan teknologi CMOS logic yang bekerja dengan tidak menghasilkan cahaya tetapi memantulkan cahaya yang ada di sekelilingnya terhadap front-lit atau mentransmisikan cahaya dari back-lit. LCD berfungsi sebagai penampil data baik dalam bentuk karakter, huruf, angka ataupun grafik. Material LCD adalah lapisan dari campuran organik antara lapisan kaca bening dengan elektroda transparan indium oksida dalam bentuk tampilan seven-segment dan lapisan elektroda pada kaca belakang. Ketika elektroda diaktifkan dengan medan listrik (tegangan), molekul organik yang panjang dan silindris menyesuaikan diri dengan elektroda dari segmen. Lapisan sandwich memiliki polarizer cahaya vertikal depan dan polarizer cahaya horisontal belakang yang diikuti dengan lapisan reflektor. Cahaya yang dipantulkan tidak dapat melewati molekul-molekul yang telah menyesuaikan diri dan segmen yang diaktifkan terlihat menjadi gelap dan membentuk karakter data yang ingin ditampilkan.
Dalam modul LCD terdapat mikrokontroler yang berfungsi sebagai pengendali tampilan karakter LCD. Mikrokontroler pada suatu LCD dilengkapi dengan memori dan register. Memori yang digunakan mikrokontroler internal LCD adalah : DDRAM (Display Data Random Access Memory) merupakan memori tempat karakter yang akan ditampilkan berada. CGRAM (Character Generator Random Access Memory) merupakan memori untuk menggambarkan pola sebuah karakter dimana bentuk dari karakter dapat diubah-ubah sesuai dengan keinginan. CGROM (Character Generator Read Only Memory) merupakan memori untuk menggambarkan pola sebuah karakter dimana pola tersebut merupakan karakter dasar yang sudah ditentukan secara permanen oleh pabrikan pembuat LCD tersebut sehingga pengguna tinggal mangambilnya sesuai alamat memorinya dan tidak dapat merubah karakter dasar yang ada dalam CGROM. Register control yang terdapat dalam suatu LCD diantaranya adalah. Register perintah yaitu register yang berisi perintah-perintah dari mikrokontroler ke panel LCD pada saat proses penulisan data atau tempat status dari panel LCD dapat dibaca pada saat pembacaan data. Register data yaitu register untuk menuliskan atau membaca data dari atau ke DDRAM. Penulisan data pada register akan menempatkan data tersebut ke DDRAM sesuai dengan alamat yang telah diatur sebelumnya. Pin, kaki atau jalur input dan kontrol dalam suatu LCD diantaranya adalah :
1. Pin data adalah jalur untuk memberikan data karakter yang ingin ditampilkan menggunakan LCD dapat dihubungkan dengan bus data dari rangkaian lain seperti mikrokontroler dengan lebar data 8 bit.
2. Pin RS (Register Select) berfungsi sebagai indikator atau yang menentukan jenis data yang masuk, apakah data atau perintah. Logika
low menunjukan yang masuk adalah perintah, sedangkan logika high
menunjukan data.
3. Pin R/W (Read Write) berfungsi sebagai instruksi pada modul jika low
tulis data, sedangkan high baca data.
4. Pin E (Enable) digunakan untuk memegang data baik masuk atau keluar. 5. Pin VLCD berfungsi mengatur kecerahan tampilan (kontras) dimana pin ini dihubungkan dengan trimpot 5 Kohm, jika tidak digunakan dihubungkan ke ground, sedangkan tegangan catu daya ke LCD sebesar 5 volt.
Adapun yang digunakan ialah LCD dot matrik dengan jumlah karakter 2 x 16. LCD sangat berfungsi sebagai penampil yang akan digunakan untuk menampilkan status kerja alat. Fitur yang disajikan dalam LCD ini adalah :
a. Terdiri dari 16 karakter dan 2 baris. b. Mempunyai 192 karakter tersimpan. c. Terdapat karakter generator terprogram. d. Dapat dialamati dengan mode 4-bit dan 8-bit. e. Dilengkapi dengan back light.