TROLI PENGIKUT OBJEK OTOMATIS BERBASIS
IMAGE
PROCESSING
MENGGUNAKAN METODE
COLOR FILTERING
LAPORAN TUGAS AKHIR
Oleh:
Anggerdini Wahyudi
102116042
FAKULTAS TEKNOLOGI INDUSTRI
PROGRAM STUDI TEKNIK ELEKTRO
UNIVERSITAS PERTAMINA
2020
A
n
g
g
erdi
n
i W
a
h
y
ud
i
1
0
2
1
1
6
0
4
2
T
RO
LI
PEN
G
IK
UT
O
BJ
E
K
O
TO
M
ATI
S
BE
RBASI
S
IMA
GE
PROCE
SSING
M
ENG
G
UN
AK
AN
M
ET
O
DE
COLOR FI
LT
ER
ING
TROLI PENGIKUT OBJEK OTOMATIS BERBASIS
IMAGE
PROCESSING
MENGGUNAKAN METODE
COLOR FILTERING
LAPORAN TUGAS AKHIR
Oleh:
Anggerdini Wahyudi
102116042
FAKULTAS TEKNOLOGI INDUSTRI
PROGRAM STUDI TEKNIK ELEKTRO
UNIVERSITAS PERTAMINA
2020
Universitas Pertamina - i
LEMBAR PENGESAHAN
Judul Tugas Akhir
:
Troli Pengikut Objek Otomatis
Berbasis
Image Processing
Menggunakan Metode
Color Filtering
Nama Mahasiswa
:
Anggerdini Wahyudi
Nomor Induk Mahasiswa
:
102116042
Program Studi
:
Teknik Elektro
Fakultas
:
Fakultas Teknologi Industri
Tanggal Lulus Sidang Tugas Akhir :
11 Agustus 2020Jakarta, 21 Agustus 2020
MENGESAHKAN
Pembimbing I
:
Nama : Herminarto Nugroho, S.T, M.Sc.
NIP
: 116056
Pembimbing II
:
Nama : Dr. Eng. Muhammad Abdillah
NIP
: 116153
MENGETAHUI,
Ketua Program Studi Teknik Elektro
Dr. Eng. Wahyu Kunto Wibowo
NIP. 116059
Universitas Pertamina - ii
LEMBAR PERNYATAAN
Dengan ini saya menyatakan bahwa Tugas Akhir berjudul “Troli Pengikut Objek
Otomatis Berbasis
Image Processing
Menggunakan Metode
Color Filtering
”
ini
adalah benar-benar merupakan hasil karya saya sendiri dan tidak mengandung
materi yang ditulis oleh orang lain kecuali telah dikutip sebagai referensi yang
sumbernya telah dituliskan secara jelas sesuai dengan kaidah penulisan karya
ilmiah.
Apabila dikemudian hari ditemukan adanya kecurangan dalam karya ini, saya
bersedia menerima sanksi dari Universitas Pertamina sesuai dengan peraturan
yang berlaku.
Demi pengembangan ilmu pengetahuan, saya menyetujui untuk memberikan
kepada Universitas Pertamina hak bebas royalti noneksklusif (
non-exclusive
royalty-free right
) atas Tugas Akhir ini beserta perangkat yang ada. Dengan hak
bebas royalti noneksklusif ini Universitas Pertamina berhak menyimpan,
mengalih media/format-kan, mengelola dalam bentuk pangkatan data (
database
),
merawat, dan mempublikasikan Tugas Akhir saya selama tetap mencantumkan
nama saya sebagai penulis/pencipta dan sebagai pemilik Hak Cipta.
Demikian pernyataan ini saya buat dengan sebenarnya
Jakarta, 27 Juli 2020
Yang membuat pernyataan,
Universitas Pertamina - iii
ABSTRAK
Anggerdini Wahyudi. 102116042
. Troli Pengikut Objek Otomatis Berbasis
Image Processing
Menggunakan Metode
Color Filtering
.
Pada tugas akhir ini dilakukan perancangan sistem pada prototipe robot troli agar
dapat melakukan penjejakan terhadap objek menggunakan proses pengolahan
citra digital dengan metode
color filtering
. Sistem akan dirancang seperti
kemampuan indra pengelihatan manusia yang dapat mengenali warna dan bentuk
dari objek. Sistem akan terintegrasi dengan kamera sebagai alat penglihatan pada
robot. Objek yang akan diidentifikasi oleh sistem berupa bola warna kuning,
merah, hijau dan biru. Terdapat tiga tahapan pada proses perancangan ini yaitu,
sistem akan mengenali warna dari objek, kemudian sistem akan mengenali bentuk
dari objek dan yang terakhir sistem akan melakukan
tracking
terhadap objek
tersebut. Awal mula sistem akan melakukan pengenalan warna menggunakan
teknik
color filtering
. Sistem akan menyaring warna yang diinginkan melalui
penetapan nilai batas minimum dan maksimum dari ruang warna HSV. Penetapan
nilai batas minimum dan maksimum HSV didapatkan dari
trial
dan
error
dengan
menyesuaikan intensitas cahaya aktual di supermarket. Kemudian sistem akan
mengenali bentuk dari bola yang berupa bangun datar lingkaran menggunakan
transformasi citra
circle hough
dengan tujuan sistem dapat mencari radius dan
center of mass
dari objek. Radius dan
center of mass
tersebut yang akan dijadikan
acuan dari gerak robot melakukan
tracking
. Pengujian sistem akan dilakukan
dengan merubah variasi intensitas cahaya dan dimensi piksel. Keberhasilan sistem
akan diketahui dari respon sistem yang memenuhi spesifikasi perancangan. Hasil
dari pengujian menunjukan sistem tidak dapat bekerja dengan intensitas cahaya 10
lux dikarenakan adanya kegagalan sistem melakukan
color filtering
. Sedangkan
sistem dapat melakukan
tracking
dengan baik pada intensitas cahaya 318 lux dan
557 lux dengan dimensi 640 × 480 piksel. Pada intensitas cahaya dan dimensi
piksel tersebut, sistem telah memenuhi spesifikasi dari
settling time
,
overshoot
,
dan
steady state error
dengan menguji dari perbedaan jarak antara robot dengan
objek.
Kata kunci (
sentence case
) :
color filtering
, HSV,
circle hough transform
,
intensitas cahaya, dimensi piksel.
Universitas Pertamina - iv
ABSTRACT
Anggerdini Wahyudi. 102116042
. Automatic object-follower trolley based on
image processing using color filtering method.
In this final project, a system design on a prototype robot trolley is carried out to
track objects using a digital image processing with color filtering methods. The
system will be designed like the ability of the human sense of sight that can
recognize the colors and shapes of objects. The system will be integrated with the
camera as a sight in the robot. The objects to be identified by the system are
yellow, red, green, and blue balls. There are three stages in this design process,
namely, the system will recognize the color of the object, then the system will
recognize the shape of the object and the final step is the system will track the
object. The beginning of the system will do color recognition using color filtering
techniques. The system will filter the desired color by setting the minimum and
maximum limit values of the HSV color space. Determination of minimum and
maximum HSV limit values are obtained from trial and error by adjusting the
actual light intensity in the supermarket. Then the system will recognize the shape
of the ball in the form of a flat circle using the transformation of the circle hough
with the aim of the system being to find the radius and center of mass of the
object. The radius and center of mass will be used as a reference for the robot to
do tracking. System testing will be done by changing the variation of light
intensity and pixel dimensions. The success of the system will be known from the
response of the system that meets the design specifications. The results of the test
show the system can‟t work with a light intensity of 10 lux due to a failure of the
system to do color filtering. While the system can track well at a light intensity of
318 lux and 557 lux with dimensions of 640 × 480 pixels. In light intensity and
pixel dimensions, the system meets the specifications of settling time, overshoot,
and steady-state error by testing the difference in distance between the robot and
the object.
Keywords (sentence case) : color filtering, HSV, circle hough transform, light
intensity, pixel dimensions.
Universitas Pertamina - v
KATA PENGANTAR
Puji syukur kehadirat Tuhan Yang Maha Esa karena berkat rahmat dan
anugerah-Nya, Laporan Tugas Akhir Mahasiswa Program Studi Teknik Elektro, Fakultas
Teknologi Industri, Universitas Pertamina – Jakarta yang berjudul “Troli Pengikut
Objek Otomatis Berbasis
Image Processing
Menggunakan Metode
Color
Filtering
” dapat diselesaikan. Proses pengerjaan laporan tugas akhir ini tidak
lepas dari bantuan banyak pihak. Adapun ucapan terima kasih diberikan kepada:
1.
Kedua orang tua serta adik saya yang selalu memberikan dukungan berupa
moral dan materil dalam mengerjakan tugas akhir.
2.
Bapak Herminarto Nugroho, S.T, M.Sc. dan Dr. Eng Muhammad Abdillah
selaku Dosen Pembimbing yang telah berkontribusi besar meluangkan waktu,
pikiran untuk membimbing, memberikan kritik dan saran, arahan serta
semangat dalam penyusunan laporan tugas akhir ini.
3.
Bapak Dr. Eng. Wahyu Kunto Wibowo, M.T., selaku Ketua Program Studi
Teknik Elektro, Universitas Pertamina.
4.
Ibu Aulia Rahma Annisa, M.T. selaku dosen wali yang telah memberikan
nasihat dan dukungan dalam mengerjakan tugas akhir.
5.
Seluruh dosen Teknik Elektro Universitas Pertamina yang senantiasa
membagikan ilmunya selama masa studi.
6.
Teman-teman Teknik Elektro 2016 yang selalu memberikan dukungan dan
bantuan.
Akhir kata, semoga laporan tugas akhir ini dapat diterima dan dapat dijadikan
bahan pembelajaran untuk penelitian yang lebih baik di masa yang akan datang.
Jakarta, 27 Juli 2020
Universitas Pertamina - vi
DAFTAR ISI
LEMBAR PENGESAHAN
... iLEMBAR PERNYATAAN
... iiABSTRAK
... iiiABSTRACT
... ivKATA PENGANTAR
... vDAFTAR ISI
... viDAFTAR TABEL
... viiiDAFTAR GAMBAR
... ixBAB I
... 12PENDAHULUAN
... 121.1
Latar Belakang ... 12
1.2
Rumusan Masalah ... 13
1.3
Batasan Masalah ... 14
1.4
Tujuan Perancangan ... 14
1.5
Manfaat Perancangan ... 14
1.6
Waktu Pelaksanaan Pengerjaan Tugas Akhir ... 14
BAB II
... 17TINJAUAN PUSTAKA
... 172.1
Autonomous Robot
... 17
2.2
Citra Digital ... 17
2.3
Ruang Warna RGB ... 18
2.4
Ruang Warna HSV ... 19
2.5
Color Filtering
... 20
2.6
OpenCV
... 22
2.7
Hough Transform
... 22
2.8
Perhitungan
Center Of Mass
... 22
2.9
IC L293D
Motor Driver
... 23
2.10 Raspberry Pi 3 Model B ... 24
BAB III
... 27Universitas Pertamina - vii
3.1
Diagram Alir Perancangan ... 27
3.2
Perancangan
Color Filtering
... 29
3.3
Perancangan Arah Penjejakan Robot ... 31
3.4
Pertimbangan Perancangan ... 33
3.5
Analisis Teknis ... 35
3.6
Peralatan dan Bahan ... 37
BAB IV
... 40HASIL DAN PEMBAHASAN
... 404.1
Variasi Intensitas Cahaya ... 41
4.1.1
Intensitas Cahaya 10 Lux ... 41
4.1.2
Intensitas Cahaya 318 Lux ... 44
4.1.3
Intensitas Cahaya 557 Lux ... 47
4.2
Variasi Dimensi Piksel ... 50
4.3
Pengaruh Intensitas Cahaya dan Dimensi Piksel terhadap Akurasi
Tracking
Objek ... 51
4.3.1 Akurasi
Tracking
Objek Pada Intensitas Cahaya 10 Lux ... 52
4.3.2 Akurasi
Tracking
Objek Pada Intensitas Cahaya 318 Lux ... 54
4.3.3 Akurasi
Tracking
Objek Pada Intensitas Cahaya 557 Lux ... 56
4.4
Akurasi
Tracking
pada Lintasan „L‟ ... 60
BAB V
... 65KESIMPULAN DAN SARAN
... 655.1
Kesimpulan ... 65
5.2
Saran ... 65
Universitas Pertamina - viii
DAFTAR TABEL
Tabel 1.1 Rencana Waktu Pelaksanaan Tugas Akhir
... 14Tabel 2.1 Arah Gerak Motor DC Menggunakan IC L293D
... 23Tabel 2.2 Spesifikasi Raspberry Pi 3 Model B
... 24Tabel 3.1 Spesifikasi Perancangan
... 37Tabel 3.2 Peralatan dan bahan pada Perancangan
... 37Tabel 4.1 Intensitas Cahaya Aktual di Supermarket
... 40Tabel 4.2
Range
dari Ruang Warna HSV
... 40Tabel 4.3 Hasil Perhitungan dari Konversi Ruang Warna RGB ke HSV
... 43Tabel 4.4 Hasil Perhitungan dari Konversi Ruang Warna RGB ke HSV
... 46Tabel 4.5 Hasil Perhitungan dari Konversi Ruang Warna RGB ke HSV
... 50Tabel 4.6 Pengaruh Intensitas Cahaya
... 50Tabel 4.7 Hasil Pengujian dari Pengaruh Intensitas Cahaya 10 Lux
... 52Tabel 4.8 Hasil Pengujian dari Pengaruh Intensitas Cahaya 318 Lux
... 54Tabel 4.9 Akurasi Sistem dari Pengaruh Intensitas Cahaya 318 Lux
... 55Tabel 4.10 Hasil Pengujian dari Pengaruh Intensitas Cahaya 557 Lux
... 56Tabel 4.11 Akurasi Sistem dari Pengaruh Intensitas Cahaya 557 Lux
... 58Tabel 4.12 Spesifikasi Lintasan „L‟
... 60Tabel 4.13 Akurasi dari Respon Sistem pada Lintasan „L‟
... 62Universitas Pertamina - ix
DAFTAR GAMBAR
Gambar 2.1 Citra dalam Koordinat Kartesian [1]
... 17Gambar 2.2 (a) Citra
Black and White
(b) Citra
Grayscale
(c) Citra RGB [1]
... 18Gambar 2.3 Ruang Warna RGB [4]
... 18Gambar 2.4 Konfigurasi Warna RGB [4]
... 19Gambar 2.5 Ruang Warna HSV[4]
... 20Gambar 2.6 Citra Dalam Ruang Warna HSV
... 20Gambar 2.8 Perhitungan
Center Of Mass
... 23Gambar 2.9 Pin L293D [14]
... 23Gambar 2.10 Diagram L293D [14]
... 24Gambar 2.11 Arsitektur Raspberry Pi 3 Model B[15]
... 25Gambar 2.12 GPIO Pin pada Raspberry Pi 3 Model B[15]
... 25Gambar 3.1 Diagram Alir Perancangan
... 27Gambar 3.2 Diagram Alir Perancangan
... 28Gambar 3.3 Algoritma Metode
Color Filtering
... 29Gambar 3.4 Objek dengan Komponen Warna RGB
... 30Gambar 3.5 (a) Hasil
Color Filtering
Warna Merah (b) Hasil
Color Filtering
Warna Kuning (c) Hasil
Color Filtering
Warna Hijau (d) Hasil
Color Filtering
Warna Biru
... 30Gambar 3.6 Visualisasi Proses
Edge Detection
... 31Gambar 3.7 Garis Tepi Membentuk Lingkaran
... 31Gambar 3.8 Proses
Circle Hough Transform
... 32Gambar 3.9 Hasil
Circle Hough Transform
... 32Gambar 3.10
Center of Mass
Objek Lingkaran
... 32Gambar 3.11
Circle Hough Transform
pada Objek Berwarna Kuning
... 33Gambar 3.12 Gerak Robot dalam Satu
Frame
... 33Gambar 3.13 Ukuran Dimensi Piksel [19]
... 34Gambar 3.14 Intensitas Cahaya Aktual di Supermarket A, B, C
... 34Gambar 3.15 Intensitas Cahaya Aktual di Supermarket D dan E
... 35Gambar 3.16 Visualisasi Lintasan
Tracking
Objek
... 36Universitas Pertamina - x
Gambar 4.2 Hasil
Color Filtering
dengan Intensitas Cahaya 10 Lux (a) Bola
Merah (b) Bola Kuning (c) Bola Hijau (d) Bola Biru
... 42Gambar 4.3 Nilai RGB pada Objek Berwarna Kuning dengan Intensitas Cahaya
10 Lux
... 42Gambar 4.4 Intensitas Cahaya 318 Lux
... 44Gambar 4.5 Hasil
Color Filtering
dengan Intensitas Cahaya 318 Lux (a) Bola
Merah (b) Bola Kuning (c) Bola Hijau (d) Bola Biru
... 45Gambar 4.6 Nilai RGB pada Objek Berwarna Kuning dengan Intensitas Cahaya
318 Lux
... 45Gambar 4.7 Intensitas Cahaya 557 Lux
... 47Gambar 4.8 Hasil
Color Filtering
dengan Intensitas Cahaya 557 Lux (a) Bola
Merah (b) Bola Kuning (c) Bola Hijau (d) Bola Biru
... 48Gambar 4.9 Nilai RGB pada Objek Berwarna Kuning dengan Intensitas Cahaya
557 Lux
... 49Gambar 4.10 Hasil
Color Filtering
dengan Dimensi Piksel (a) 480 × 320 piksel
(b) 640 × 480 piksel (c) 800 × 600 piksel
... 51Gambar 4.11 Hasil Rekaman dari Pengujian Alat
... 52Gambar 4.12 Objek di Intensitas Cahaya 10 Lux dengan Jarak (a) 60 cm (b) 80
cm (c) 110 cm
... 53Gambar 4.13 Intensitas Cahaya pada Jarak 110 cm
... 54Gambar 4.13 Grafik Respon Sistem yang Memenuhi Spesifikasi
Settling Time
.. 59Gambar 4.14 Grafik Respon Sistem yang Memenuhi Spesifikasi
Overshoot
... 59Gambar 4.15 Grafik Respon Sistem yang Memenuhi Spesifikasi
Steady State
Error
pada (a) sumbu x (b) sumbu y
... 60Gambar 4.16 Posisi Robot Troli dengan Lintasan Belok dengan Dimensi 640 ×
480 Piksel dan Intensitas Cahaya 557 Lux (a) Sumbu X (b) Sumbu Y
... 61Universitas Pertamina - 12
BAB I
PENDAHULUAN
1.1
Latar Belakang
Kemudahan dan kenyamanan saat berbelanja menjadikan suatu daya tarik bagi masyarakat di supermarket. Salah satu cara untuk memenuhi hal tersebut adalah dengan menyediakan fasilitas berbelanja yang lengkap seperti troli. Troli memberi kemudahan kepada konsumen dalam membawa barang. Namun, semakin bertambah barang yang dibeli maka bertambah pula beban pada troli yang akan didorong atau ditarik sehingga mengurangi aktifitas konsumen saat berbelanja. Oleh sebab itu, dibutuhkan suatu mesin yang dapat menggantikan pekerjaan manusia dalam membawa barang yaitu robot troli belanja pengikut otomatis yang dapat mengikuti pola gerakan yang ditentukan oleh pengguna. Agar robot dapat mengikuti pola gerakan maka robot diharapkan mampu melihat objek disekitar robot tersebut seperti sebuah indra penglihatan manusia. Indra penglihatan yang akan digunakan pada robot dapat berupa kamera yang dapat terintegrasi dengan sistem. Kamera akan merekam gambar yang diubah dalam citra digital sehingga komputer dapat menganalisis dan memproses informasi menjadi perintah tertentu.
Pengolahan atau pemrosesan sinyal dengan input berupa citra ditransformasikan menjadi citra digital sebagai output melalui teknik tertentu. Citra digital merupakan representasi dari sebuah citra dua dimensi sebagai kumpulan nilai digital (piksel)[2]. Pengolahan citra digital (image processing) biasanya digunakan dalam beberapa bidang, salah satunya dalam bidang automatic control robotics
untuk computer vision. Inti dari teknologi computer vision adalah untuk menduplikasi kemampuan penglihatan manusia kedalam benda elektronik sehingga benda elektronik dapat memahami dan mengerti arti dari citra yang dimasukkan[4].
Perancangan dalam tugas akhir ini bertujuan agar prototipe troli mampu mengikuti gerak konsumen menggunakan teknologi dengan sistem robotika yang dapat merekam objek melalui kamera, melakukan pengenalan objek berdasarkan bentuk dan warna, serta dapat melakukan penjejakan terhadap objek bergerak secara real time. Objek yang akan digunakan pada perancangan tugas akhir ini ialah dengan menggunakan bola. Bola ini akan merepresentasikan dari manusia yang menjadi objek penjejakkan sesungguhnya. Hal ini dikarenakan ketika indra penglihatan manusia melihat bentuk objek dalam kehidupan nyata dapat berupa bangun datar yang sederhana seperti segitiga, persegi, persegi panjang, trapesium, oval maupun lingkaran. Sehingga pada tahap awal perancangan ini sistem akan dirancang mengenali bangun datar yang sederhana terlebih dahulu. Diantara bangun datar tersebut, lingkaran memiliki kurva tertutup dengan nilai jari-jari (r) yang konstan[5]. Nilai jari-jari-jari-jari (r) dari lingkaran tersebut yang akan digunakan sebagai acuan dari penjejakan robot. Bola akan memiliki spesifik warna dengan intensitas warna tertentu sebagai dasar dilakukan proses color filtering. Pemilihan metode color filtering pada perancangan ini dikarenakan metode color filtering ini menggunakan logika yang sederhana untuk mengklasifikasikan dari suatu warna objek. Metode ini hanya akan meloloskan warna yang diinginkan dengan penetapan batas-batas minimum dan maksimum dari suatu warna. Sehingga proses komputasi akan lebih cepat dari pada metode lainnya. Adapun metode lain berupa penggunaan RFID (Radio Frequency Identification) untuk identifikasi berbasis gelombang radio. Setiap RFID terdiri dari RFID tag dan RFID reader dengan tiap RFID tag memiliki ID unik untuk mengetahui informasi berguna berupa informasi posisi, pelacakan maupun informasi produk[22].
Universitas Pertamina - 13
menentukan jarak baca antara reader dengan RFID tag. Indeks kekuatan sinyal radio yang diterima akan menjadi solusi penentuan lokasi dan memperkirakan koordinat dari pengguna. Pada studi literatur [22], RFID akan menentukan posisi dari tag yang dipegang oleh pengguna dengan menempati posisi tertentu pada area pergerakan. Apabila RFID diaplikasikan pada ruang lingkup belanja di supermarket maka akan banyak antena yang ditaruh di area supermarket karena pergerakan dari konsumen(pengguna) yang acak dan tidak dapat diatur. Sehingga pada metode
color filtering dipilih karena akan secara real time bergerak mengikuti setiap perubahan posisi konsumen. Namun metode color filtering ini sangat bergantung dengan intensitas cahaya yang mengenai objek karena akan merubah warna yang di tangkap oleh kamera dan juga apabila banyak nya objek yang akan di identifikasi dengan ukuran yang sama dan warna yang sama pada satu waktu yang direkam oleh kamera akan mempengaruhi performa dari metode color filtering itu sendiri. Tetapi metode ini dipilih juga dikarenakan sistem yang akan dirancang dapat melakukan penjejakan terhadap objek secara cepat untuk mengikuti gerak pengguna ketika berbelanja. Kemudian objek direkam oleh kamera dalam citra dua dimensi yang selanjutnya ruang warna pada citra akan dikonversi dari ruang warna RGB ke dalam ruang warna HSV. Penggunaan ruang warna HSV pada proses color filtering dikarenakan model warna HSV mendekati visual indra penglihatan manusia dalam menggambarkan dan membedakan sensasi warna[3]. Ketika mata melihat objek, ruang warna HSV akan merepresentasikan rona, saturasi dan kecerahan dari objek. Rona akan menggambarkan true color dari objek (kuning murni, merah murni maupun jingga). Saturasi menyatakan tingkat kemurnian suatu warna dengan mengindikasikan seberapa banyak warna putih yang ada dalam suatu warna. Sedangkan kecerahan merupakan atribut yang menyatakan banyaknya cahaya yang diterima oleh mata tanpa memedulikan warna[10]. Hal ini yang menjadikan ruang warna HSV dapat mewujudkan pengertian dari intensitas dan menjadi faktor dalam menggambarkan sensasi warna[3]. Keuntungan dalam penggunaan ruang warna HSV yaitu proses pengolahan citra yang cepat sehingga sesuai untuk penerapan komputasi secara real time [7]. Metode colorfiltering akan mengekstraksi warna dengan menentukan nilai dari range HSV melalui penetapan batas minimum dan maksimum dari komponen warna tertentu. Setelah mendapatkan nilai batas dari komponen warna, dilakukan thresholding pada citra untuk mengubah citra menjadi dua mode yaitu hitam dan putih agar dapat membedakan daerah objek dan background. Agar sistem dapat mengenali bentuk lingkaran, maka pada Tugas Akhir ini menggunakan suatu fungsi yang terdapat dalam library openCV yaitu cv2.HoughCircles(). Pada proses circle hough transform, sistem akan mengidentifikasi garis tepi dari lingkaran yang kemudian garis tepi tersebut akan dijadikan sebagai acuan dari pencarian center of mass dan radius objek[8]. Setelah sistem mengenali warna dan bentuk objek, maka tahapan terakhir yaitu penjejakan terhadap objek. Area dan radius dari objek akan menentukan posisi dan kecepatan gerak robot. Sehingga pada perancangan ini menggunakan mini komputer berupa Raspberry Pi 3 Model B sebagai embedded
system yang dapat melakukan pengolahan citra digital dan kendali untuk penggerak roda.
1.2
Rumusan Masalah
Berdasarkan latar belakang yang telah diuraikan, maka dapat dirumuskan suatu permasalahan dalam perancangan ini yaitu:
1. Melakukan proses identifikasi warna pada objek berdasarkan ilmu pengolahan citra digital menggunakan metode color filtering.
Universitas Pertamina - 14
3. Merancang program agar robot dapat menentukan posisi dan pola gerakan untuk mengikuti perpindahan objek.
4. Pengaruh penggunaan metode color filtering terhadap durasi waktu tracking.
1.3
Batasan Masalah
Perancangan pada tugas akhir ini akan diberi batasan masalah agar dapat memenuhi rumusan masalah yang telah ditentukan. Hal-hal yang akan dilakukan dalam perancangan ini akan dibatasi pada beberapa batasan masalah, yaitu:
1. Bentuk dari objek yang akan di identifikasi berupa bola dengan diameter 6 cm. 2. Pengambilan citra hanya menggunakan 1 kamera.
3. Posisi ideal objek terhadap robot berjarak 10 cm.
4. Troli pengikut otomatis berupa purwarupa mobil beroda dengan 2 roda terhubung dengan motor DC dan 1 roda penyeimbang.
5. Perancangan troli pengikut otomatis ini tidak diberi beban.
1.4
Tujuan Perancangan
Tujuan yang ingin dicapai dari perancangan ini adalah sebagai berikut:
1. Mengetahui tingkat akurasi dalam identifikasi warna terhadap objek menggunakan metode
color filtering.
2. Melakukan perancangan pada robot beroda agar dapat melakukan penjejakan terhadap objek bergerak berbasis image processing.
1.5
Manfaat Perancangan
Manfaat yang didapat dari perancangan ini adalah sebagai berikut:
1. Perancangan ini diharapkan mampu melakukan identifikasi warna objek berbasis image processing secara akurat.
2. Pembuatan prototipe pada troli pengikut otomatis diharapkan dapat dikembangkan untuk skala yang lebih besar.
3. Pembuatan troli pengikut otomatis dapat digunakan agar mempermudah manusia dalam melakukan kegiatan berbelanja.
1.6
Waktu Pelaksanaan Pengerjaan Tugas Akhir
Adapun rencana waktu pelaksanaan Tugas Akhir (TA) diperkirakan dari awal bulan Januari 2020 hingga akhir bulan Agustus 2020 yang ditunjukkan pada tabel 2.2.
Tabel 1.1 Rencana Waktu Pelaksanaan Tugas Akhir
Kegiatan Pekan Ke- Output
1 2 3 4 5 6 7 8 9 Penyusunan
Proposal Proposal TA.
Pembelian Komponen
Ketersediaan komponen. Perancangan Code Code sesuai dengan
Universitas Pertamina - 15
algoritma yang telah dirancang. Perakitan Alat Alat selesai dirakit
dan siap diuji Penyusunan
Laporan TA pada Bab 1-3
Laporan TA Bab 1-3
Kegiatan Pekan Ke- Output
10 11 12 13 14 15 16 17 18 Penyusunan Laporan TA pada Bab 1-3 Laporan TA Bab 1-3 Membuat Presentasi Kemajuan TA Bahan presentasi Seminar kemajuan TA Seminar kemajuan TA Seminar kemajuan TA Testing kelayakan alat
Perbaikan pada alat dan code jika terdapat error.
Kegiatan Pekan Ke- Output
19 20 21 22 23 24 25 26 27
Testing kelayakan alat
Perbaikan pada alat dan code jika terdapat error. Evaluasi kinerja
alat
Alat bekerja sesuai algoritma. Pengambilan data
sebagai bahan laporan TA pada
Bab 4-5
Data yang didapat memiliki kecocokan
dengan penelitian yang sudah ada. Penyusunan
Laporan TA pada Bab 4-5
Laporan TA Bab 4-5
Kegiatan Pekan Ke- Output
28 29 30 Pendaftaran Sidang TA Memenuhi syarat sidang TA sesuai administrasi prodi. Persiapan Sidang TA Bahan presentasi sidang dan memenuhi syarat sidang TA sesuai administrasi prodi.
Sidang TA Melakukan sidang
Universitas Pertamina - 17
BAB II
TINJAUAN PUSTAKA
2.1
Autonomous Robot
Autonomous robot menjadi teknologi yang memiliki potensi tinggi dalam jaringan
transportasi, industri, maupun setiap kegiatan dalam kehidupan manusia. Robot autonomous dapat membantu kegiatan manusia dalam suatu lingkungan tanpa bimbingan manusia dan bergerak sesuai dengan logika-logika yang telah diberikan oleh manusia[11]. Salah satu jenis robot yang mempunyai kemampuan untuk berpindah lokasi dari satu tempat ke tempat yang lain adalah
wheeled car robot (robot beroda). Robot beroda dapat diperintahkan untuk mengikuti sebuah petunjuk atau garis maupun menggunakan sistem computer vision agar bergerak ke arah tertentu yang telah diperintahkan oleh manusia. Robot dengan sistem computer vision mampu mengenali dan menganalisis objek secara visual yang telah direpresentasikan dalam citra 2 dimensi[2]. Setelah robot dapat mengenali objek, maka robot dapat melakukan pergerakan dan pengendalian posisi terhadap objek yang bergerak. Robot bergerak menggunakan roda dengan berbagai ragam macam roda untuk melintasi permukaan datar. Pada robot beroda dua, jika robot bergerak ke kiri maka roda pada bagian kiri robot akan diam sedangkan roda pada bagian kanan robot akan bergerak maju[13]. Jika robot bergerak ke depan, maka kedua roda akan bergerak maju. Sedangkan, jika robot bergerak mundur, maka kedua roda akan bergerak mundur.
2.2
Citra Digital
Citra digital merupakan representasi dari suatu objek dalam bidang 2 dimensi (2D) yang tersusun dari beberapa piksel dengan posisi I(m,n) dalam koordinat kartesian (x,y). Indeks m dan n
menunjukkan baris dan kolom dari piksel (m= 0,1,2,…, M; n= 0,1,2,…,N) yang dimulai dari kiri suatu citra (gambar 2.1)[1]. Setiap piksel memiliki satu warna dan tingkat kecerahan tertentu membentuk suatu pola yang menghasilkan citra.
Gambar 2.1 Citra dalam Koordinat Kartesian [1]
Pada citra biner atau black and white hanya memiliki dua nilai yaitu 0 dan 1, maka setiap piksel hanya memiliki ukuran 1 bit. Nilai 0 mewakili warna hitam dan nilai 1 mewakili warna putih. Sedangkan citra digital bertipe grayscale menampilkan piksel dengan derajat keabuan antara 0 (hitam) sampai 255 (putih). Setiap piksel memiliki ukuran 8 bit atau 1 byte dengan nilai intensitas tinggi menyatakan warna putih dan nilai rendah menyatakan warna hitam. Adapun citra digital bertipe RGB atau true colour yang memiliki 3 komponen warna yaitu merah (R), hijau (G) dan
Universitas Pertamina - 18
biru (B). Setiap komponen warna memiliki jangkauan nilai antara 0 sampai 255 (8 bit). Citra dengan warna RGB memiliki ukuran bit pada setiap piksel 24 bit (8 bit Red, 8 bit Green, 8 bit
Blue).
(a) (b)
(c)
Gambar 2.2 (a) Citra Black and White (b) Citra Grayscale (c) Citra RGB [1]
2.3
Ruang Warna RGB
Suatu warna didefinisikan dari penggabungan 3 warna dasar dengan proporsi dan intensitas tertentu pada setiap warna dasar. Warna dasar dari model warna RGB adalah merah(red), hijau(green), dan biru(blue)[2]. Dalam suatu ruang yang sama sekali tidak ada cahaya, maka ruang tersebut adalah gelap total. Tidak ada sinyal gelombang cahaya yang diserap oleh mata sehingga dalam ruang gelap total memiliki ruang warna RGB (0,0,0). Apabila ditambahkan cahaya merah pada ruang tersebut maka akan berubah menjadi RGB (255,0,0). Begitu pula pada warna biru dan hijau. Perhitungan model warna dalam komputer direpresentasikan dengan nilai komponen seperti RGB (r,g,b) dengan masing masing nilai antara 0 hingga 255[4]. Apabila model warna RGB dikombinasikan maka menghasilkan 16.777.216 (2563) kombinasi warna.
Gambar 2.3 Ruang Warna RGB [4]
Universitas Pertamina - 19
Gambar 2.4 Konfigurasi Warna RGB [4]2.4
Ruang Warna HSV
Model warna HSV mendefinisikan warna dalam terminologi Hue, Saturation dan Value. Hue
berasosiasi dengan panjang gelombang cahaya yang menggambarkan dari true color (kuning murni, merah atau jingga)[4]. Saturation menyatakan tingkat kemurnian suatu warna dengan mengindikasikan seberapa banyak warna putih yang ada dalam suatu warna. Sedangkan value
merupakan atribut yang menyatakan banyaknya cahaya yang diterima oleh mata tanpa memperdulikan warna, nilainya berkisar 0-100%. Untuk merubah nilai RGB menjadi nilai HSV dapat menggunakan teori Travis sebagai berikut.
' 255 R R (2.1) ' 255 G G (2.2) ' 255 B B (2.3) Cmax max( ', R G B', ') (2.4) Cmin min( ', R G B', ') (2.5) max min C C (2.6)
Perhitungan untuk nilai Hue:
0 0 ' ' 60 mod 6 , Cmax ' ' ' 60 2 , Cmax ' ' ' 60 4 , Cmax ' G B R H B R G R G B (2.7)
Universitas Pertamina - 20
0 , max 0 ,Cmax 0 max C S C (2.8)Perhitungan untuk nilai Value: max
VC (2.9)
Gambar 2.5 Ruang Warna HSV[4]
Gambar 2.6 Citra Dalam Ruang Warna HSV
2.5
Color Filtering
Color filtering adalah suatu teknik pengolahan citra yang dipakai untuk memanipulasi suatu citra berdasarkan warna spesifik. Penerapan algoritma color filtering diawali dengan kalibrasi. Kalibrasi digunakan untuk mengetahui nilai batas minimum dan nilai batas maksimum dari komponen warna. Warna yang digunakan adalah model warna HSV (Hue, Saturation, Value) yang telah dikonversi dari komponen warna R (Red) G (Green) dan B (Blue). Pada persamaan (2.1) sampai persamaan (2.9) adalah rumus untuk konversi citra dari ruang warna RGB ke ruang warna HSV secara umum. Pada openCV untuk mengolah data dari ruang warna HSV menggunakan ukuran 8 bit per channel pada IplImage [23]. Oleh sebab itu, diperlukan konversi pada openCV dengan ketentuan pada persamaan (2.10)
255, 255, 2( 255) H V S H to fit to (2.10)
Namun pada library openCV menyediakan fungsi untuk memproses konversi RGB ke ruang warna HSV menggunakan fungsi cv2.cvtColor. Berikut perintah yang digunakan.
imgHSV=cv2.cvtColor(image, cv2.COLOR_BGR2HSV);
Pada hasil konversi akan disimpan kedalam data citra imgHSV dan akan digunakan lebih lanjut dalam proses color filtering. Berikut formula pada proses color filtering adalah:
Universitas Pertamina - 21
If ((H>Hmin) & (H<Hmax) & (S>Smin) & (S<Smax) & (V>Vmin) & (V<Vmax)) Pixel = 255; //putih
Else
Pixel = 0;//hitam
Kalibrasi inilah yang akan menentukan Hmin&Hmax, Smin&Smax, dan Vmin&Vmax untuk meloloskan dari warna yang diinginkan. Adapun penjelasan dari algoritma color filtering pada gambar 2.7.
Gambar 2.7 Algoritma Color Filtering[16]
Keterangan:
ImgHSV : merupakan citra HSV yang sudah melalui konversi ruang warna RGB. MaxX : jumlah maksimal resolusi citra X (kolom).
MaxY : jumlah maksimal resolusi citra Y ( baris). Nilai 0 : warna hitam.
Nilai 255 : warna putih.
Universitas Pertamina - 22
Setelah melalui proses pada gambar 2.7 sistem telah mengenali dari warna yang akan dijadikan objek penjejakkan. Bila warnanya tidak sesuai dengan warna spesifik maka komponen warna piksel tersebut akan diubah menjadi warna background yaitu menjadi warna hitam. Warna yang digunakan dalam color filtering dapat direpresentasikan dalam berbagai ruang warna. Ada beberapa ruang warna yang dikenal, antara lain Red, Green, Blue (RGB), Hue, Saturation, Value
(HSV), YcbCr. Selanjutnya sistem akan melakukan identifikasi bentuk objek menggunakan circle hough transform.
2.6
OpenCV
Computer Vision adalah salah satu cabang dari bidang ilmu pengolahan citra atau (image
processing) yang memungkinkan komputer dapat melihat seperti manusia. Dengan kemampuan
tersebut komputer dapat mengambil keputusan, melakukan aksi, dan mengenali suatu objek. OpenCV sebagai platform dari pengembangan sistem computer vision dapat melakukan object Identification, face recognition, face detection, maupun motion tracking[12]. OpenCV (Open Computer Vision) merupakan opensource dari sebuah API (Application Programming Interface)
library yang digunakan untuk melakukan pengolahan citra digital. Fitur pada OpenCV yang dapat
digunakan antara lain untuk manipulasi data citra (allocation, copying, convert), kalibrasi kamera, manipulasi matriks dan vektor, analisis gerakan (optical flow, segmentation, tracking), serta melakukan pengenalan objek.
2.7
Hough Transform
Hough transform merupakan suatu metode pada transformasi citra untuk mendeteksi garis, lingkaran maupun bentuk objek lainnya dengan mengisolasi suatu objek dengan menemukan batas-batas dari suatu objek tersebut (edge detection)[9]. Adapun teknik ekstraksi fitur untuk mendeteksi bentuk lingkaran adalah algoritma circle hough transform. Dalam ruang tiga dimensi 3D (x,y,r), sebuah lingkaran dapat digambarkan pada persamaan (2.11)[8].
2 2 2
(xa) (y b) r (2.11)
Untuk nilai (a,b) merupakan pusat dari lingkaran dan r merupakan jari-jari lingkaran. Secara umum komputasi dan ukuran akumulator meningkat secara polinomial dengan jumlah parameternya seperti pada persamaan (2.12) dan (2.13)
cos ( )
x a r (2.12)
sin ( )
y b r (2.13)
Metode circle hough transform digunakan untuk menentukan parameter (x,y,r). merupakan sudut lingkaran dengan nilai dari parameter x dan y akan berubah sesuai dengan perubahan sudut ( ).
2.8
Perhitungan
Center Of Mass
Mencari titik koordinat pusat dalam sebuah citra sangat penting untuk membuat algoritma untuk menentukan arah gerakan robot agar dapat melakukan penjejakan dari objek yang bergerak.
Center of mass merupakan metode yang dapat dipergunakan untuk menentukan titik keseimbangan
dari suatu objek dalam citra yang telah melalui proses deteksi tepi. Model matematika untuk menentukan center of mass ditunjukkan pada persamaan (2.14) dan (2.15).
Posisi X x1 x2 x3 ... xn n
Universitas Pertamina - 23
Posisi Y y1 y2 y3 ... yn n (2.15)Dengan koordinat nilai x dan y ditunjukkan pada gambar 2.7.
Gambar 2.8 Perhitungan Center Of Mass
2.9
IC L293D
Motor Driver
IC L293D dirancang sebagai pengendali motor DC yang tersusun dari 4 buah transistor. Sehingga dalam satu IC L293D dapat membuat driver H-bridge untuk dua motor DC. Driver motor
H-bridge dapat mengendalikan arah putaran motor DC dalam dua arah dan dikontrol menggunakan
metode PWM (Pulse Width Modulation) maupun metode sinyal logika dasar TTL (Transistor-transistor Logic)[14].
Gambar 2.9 Pin L293D [14]
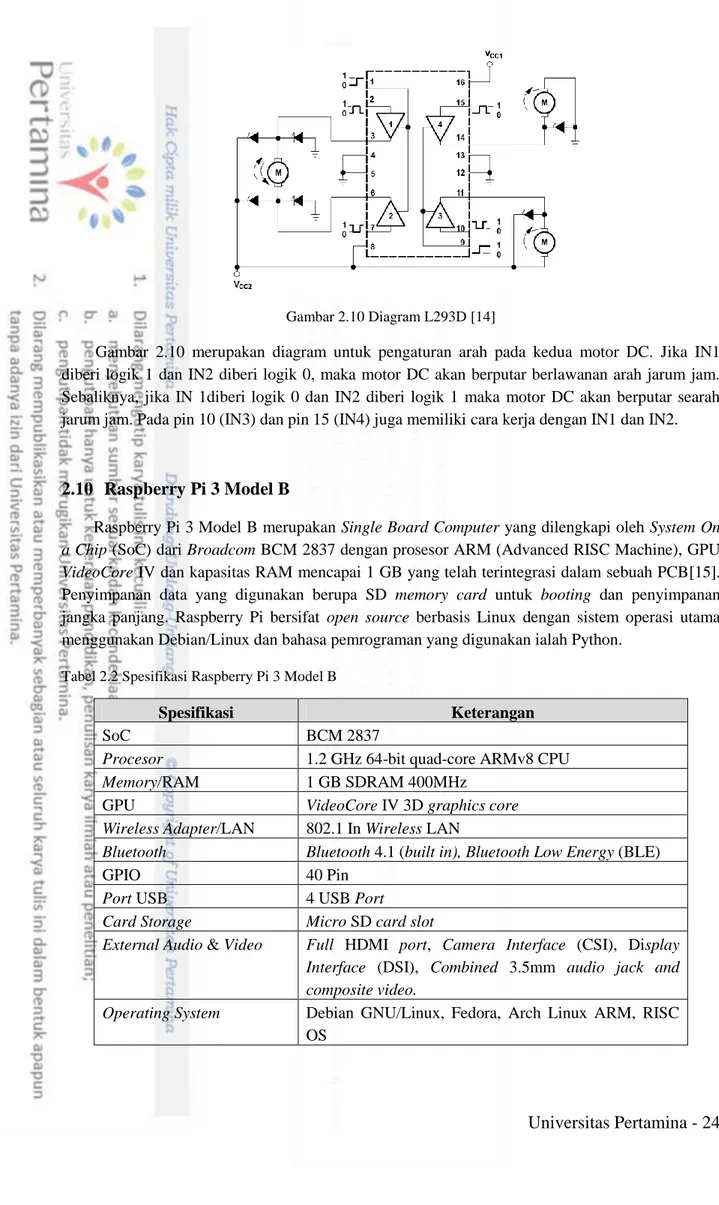
Pin 8 (Vs) pada IC L293D merupakan power supply untuk motor DC dan pin 16 (Vss) merupakan power supply untuk IC L293D. Pada pin 1 (EN1) dan pin 9 (EN2) dihubungkan dengan PWM untuk mengontrol kecepatan motor DC. Sedangkan untuk mengontrol arah gerak motor digunakan logika sebagai berikut.
Tabel 2.1 Arah Gerak Motor DC Menggunakan IC L293D
IN 1 (Pin 2) IN 2 (Pin 7) Kondisi Motor 1
0 0 Stop
1 0 Putar Berlawanan Jarum Jam 0 1 Putar Searah Jarum Jam
Universitas Pertamina - 24
Gambar 2.10 Diagram L293D [14]Gambar 2.10 merupakan diagram untuk pengaturan arah pada kedua motor DC. Jika IN1 diberi logik 1 dan IN2 diberi logik 0, maka motor DC akan berputar berlawanan arah jarum jam. Sebaliknya, jika IN 1diberi logik 0 dan IN2 diberi logik 1 maka motor DC akan berputar searah jarum jam. Pada pin 10 (IN3) dan pin 15 (IN4) juga memiliki cara kerja dengan IN1 dan IN2.
2.10
Raspberry Pi 3 Model B
Raspberry Pi 3 Model B merupakan Single Board Computer yang dilengkapi oleh System On
a Chip (SoC) dari Broadcom BCM 2837 dengan prosesor ARM (Advanced RISC Machine), GPU
VideoCore IV dan kapasitas RAM mencapai 1 GB yang telah terintegrasi dalam sebuah PCB[15].
Penyimpanan data yang digunakan berupa SD memory card untuk booting dan penyimpanan jangka panjang. Raspberry Pi bersifat open source berbasis Linux dengan sistem operasi utama menggunakan Debian/Linux dan bahasa pemrograman yang digunakan ialah Python.
Tabel 2.2 Spesifikasi Raspberry Pi 3 Model B
Spesifikasi Keterangan
SoC BCM 2837
Procesor 1.2 GHz 64-bit quad-core ARMv8 CPU
Memory/RAM 1 GB SDRAM 400MHz
GPU VideoCore IV 3D graphics core
Wireless Adapter/LAN 802.1 In Wireless LAN
Bluetooth Bluetooth 4.1 (built in), Bluetooth Low Energy (BLE)
GPIO 40 Pin
Port USB 4 USB Port
Card Storage Micro SD card slot
External Audio & Video Full HDMI port, Camera Interface (CSI), Display
Interface (DSI), Combined 3.5mm audio jack and
composite video.
Operating System Debian GNU/Linux, Fedora, Arch Linux ARM, RISC
Universitas Pertamina - 25
Gambar 2.11 Arsitektur Raspberry Pi 3 Model B[15]Arsitektur Raspberry Pi 3 Model B yang ditunjukkan pada gambar 2.11 memiliki keterangan sebagai berikut.
1 : Pin GPIO (40 Pin) 2: USB Port
3 : Ethernet Port
4 : 3.5 mm 4-pole Composite Video & Audio Output Jack 5 : CSI Camera Port
6 : HDMI Video Output 7 : Micro USB
8 : DSI Display Port
9 : BCM2837 1.2 GHz 64-bit quad core ARMv8 CPU dan 1 GB RAM
Gambar 2.12 GPIO Pin pada Raspberry Pi 3 Model B[15]
Pada gambar 2.12 dapat dilihat fungsi dari setiap pin GPIO pada Raspberry Pi 3 Model B. Model B pada raspberry Pi memiliki RAM sebesar 512 MB[15]. Memori RAM pada model B lebih besar dari pada Raspberry Pi model A yang hanya memiliki RAM sebesar 256 MB. Raspberry Pi Model B juga telah dilengkapi dengan ethernet port.
Universitas Pertamina - 27
BAB III
KONSEP PERANCANGAN
3.1
Diagram Alir Perancangan
Untuk mengetahui cara kerja dari robot troli pengikut objek otomatis maka dibuat diagram alir perancangan yang ditunjukkan pada gambar 3.1 dan gambar 3.2.
Universitas Pertamina - 28
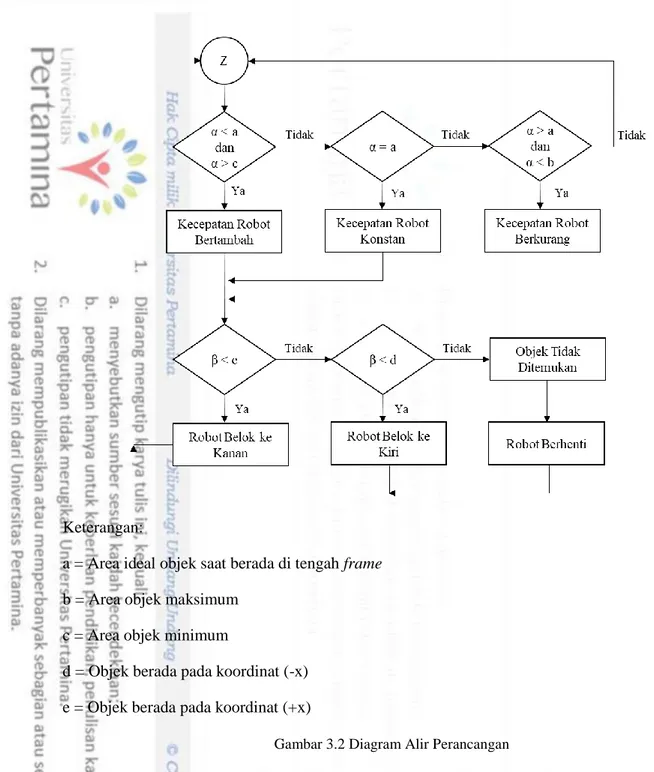
Keterangan:
a = Area ideal objek saat berada di tengah frame
b = Area objek maksimum c = Area objek minimum
d = Objek berada pada koordinat (-x) e = Objek berada pada koordinat (+x)
Gambar 3.2 Diagram Alir Perancangan
Alir perancangan dalam Tugas Akhir ini pada intinya dibagi menjadi tiga tahapan yaitu sistem mengidentifikasi warna objek, kemudian sistem mengidentifikasi bentuk dari objek dan yang terakhir ialah sistem dapat melakukan penjejakan terhadap objek. Proses di awali dengan pengambilan citra oleh pi camera dengan dimensi piksel tertentu. Lalu citra yang telah direkam oleh pi camera diubah dari ruang warna RGB menjadi HSV. Kemudian langkah selanjutnya ialah proses color filtering. Color filtering digunakan untuk mendapatkan intensitas warna tertentu dari suatu citra digital dengan menetapkan batas minimum dan maksimum komponen HSV dari warna tersebut. Agar dapat membedakan daerah objek dan daerah background, citra diubah menjadi dua mode yaitu hitam dan putih. Konversi citra tersebut dinamakan thresholding. Sebelum menentukan arah penjejakan robot, sistem harus mengetahui area dan center of mass dari objek tersebut. Hal itu digunakan agar sistem dapat mengetahui koordinat dari suatu objek dalam satu frame citra. Teknik ekstraksi citra untuk mendeteksi lingkaran pada perancangan ini adalah menggunakan circle hough transform. Saat robot dalam posisi diam, objek berada ditengah frame dengan nilai (x,y) dan radius tertentu. Pola gerakan robot mengacu kepada radius dan koordinat piksel dari objek. Ketika radius
Universitas Pertamina - 29
objek menjadi lebih kecil, maka robot akan menyesuaikan kecepatan agar dapat mendekati objek dan memposisikan robot agar objek selalu berada di tengah frame.
3.2
Perancangan
Color Filtering
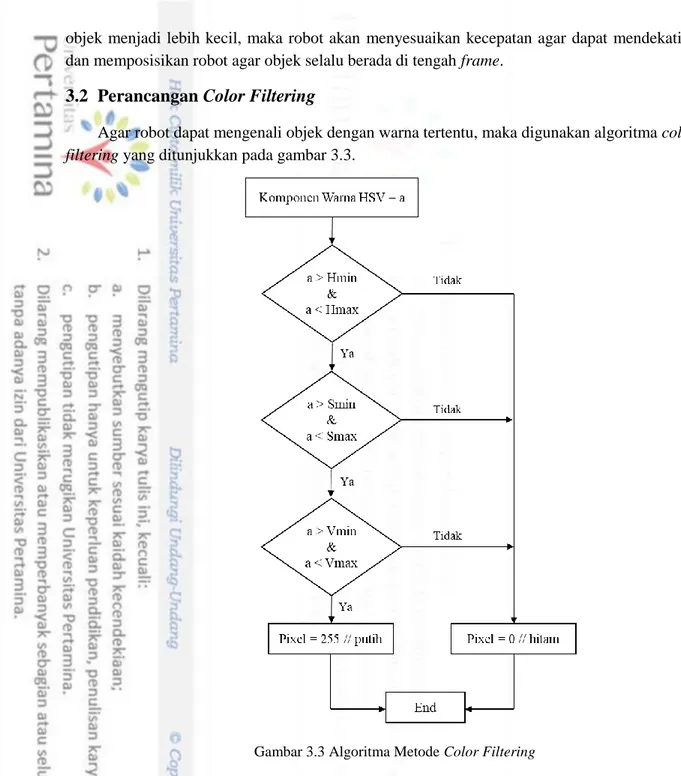
Agar robot dapat mengenali objek dengan warna tertentu, maka digunakan algoritma color filtering yang ditunjukkan pada gambar 3.3.
Gambar 3.3 Algoritma Metode Color Filtering
Citra dengan model warna RGB yang telah dikonversi menjadi model warna HSV dijadikan sebagai input pada proses filtering untuk mendapatkan komponen suatu warna. Warna yang digunakan meliputi bola berwarna merah, kuning, hijau dan biru. Jika suatu piksel memiliki nilai komponen warna Hue (H), Saturation(S) dan Value(V) di antara batas minimum dan maksimum dari spesifik warna objek maka piksel tersebut akan diubah menjadi warna putih (piksel =255). Sedangkan piksel yang bukan di antara batas minimum dan maksimum akan dijadikan warna hitam (piksel = 0). Konversi citra menjadi hitam dan putih dilakukan agar dapat mengetahui daerah objek dan daerah background atau yang disebut dengan proses thresholding.
Universitas Pertamina - 30
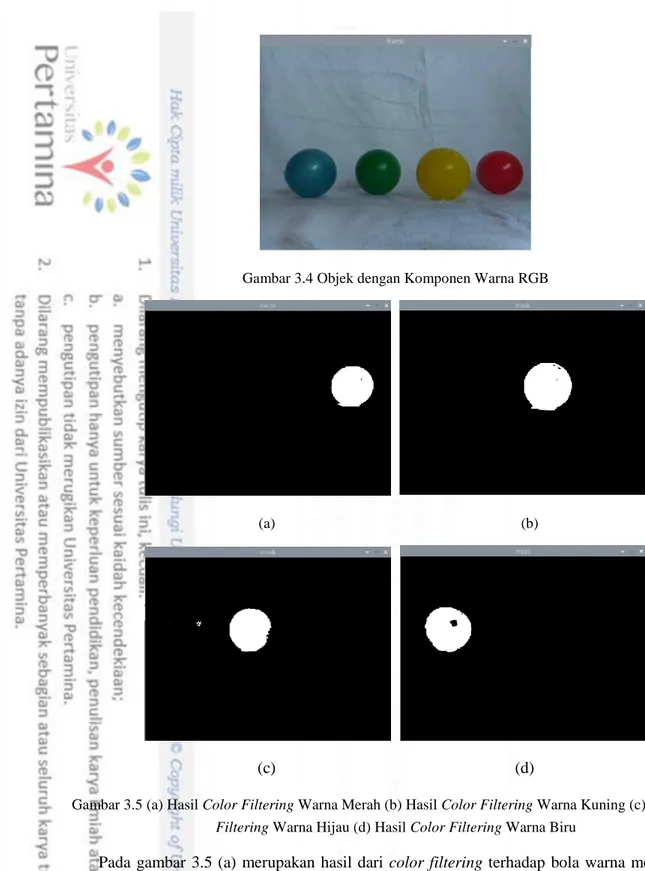
Gambar 3.4 Objek dengan Komponen Warna RGB
(a) (b)
(c) (d)
Gambar 3.5 (a) Hasil Color Filtering Warna Merah (b) Hasil Color Filtering Warna Kuning (c) Hasil Color Filtering Warna Hijau (d) Hasil Color Filtering Warna Biru
Pada gambar 3.5 (a) merupakan hasil dari color filtering terhadap bola warna merah dengan batas minimum untuk masing masing komponen Hue(H), Saturation(S), Value(V) adalah (100, 80, 0) dan batas maksimum bernilai (179, 255, 255). Pada hasil color filtering terhadap bola warna kuning memiliki batas minimum untuk masing masing komponen Hue(H), Saturation(S), Value(V) adalah (20, 100, 0) dan batas maksimum bernilai (60, 255, 255). Untuk color filtering bola warna hijau yang ditunjukkan pada gambar 3.4 (c) memiliki batas minimum untuk masing masing komponen Hue(H), Saturation(S), Value(V) adalah (40,60,0) dan batas maksimum bernilai (80, 255, 255). Sedangkan color filtering bola warna biru, batas minimum untuk masing masing komponen Hue(H), Saturation(S), Value(V) adalah (80, 40, 0) dan batas maksimum bernilai (120, 255, 255).
Universitas Pertamina - 31
3.3
Perancangan Arah Penjejakan Robot
Arah penjejakan robot dapat dilakukan apabila sistem telah mengindentifikasi warna dan bentuk objek. Sistem telah mengetahui warna objek melalui proses color filtering yang telah dijelaskan pada subbab 3.2. Pada perancangan ini objek yang digunakan berupa bola sehingga sistem akan dirancang agar dapat mengetahui bentuk lingkaran. Awal mula sistem dapat mengetahui bentuk lingkaran ialah mendeteksi garis tepi yang membatasi dua wilayah citra yang memiliki tingkat kecerahan yang berbeda atau yang disebut edge detection. Ide dasar dari edge detection yaitu membandingkan satu piksel dengan piksel yang lain (neighborhood) dengan melihat selisih dari kedua nilai piksel tersebut. Ketika proses thresholding, citra telah dibedakan menjadi hitam (piksel = 0) dan putih (piksel = 255). Jika piksel pada koordinat (0,0) memiliki nilai piksel = 255 dan piksel (1,0) memiliki nilai piksel = 0, maka selisih dari kedua piksel tidak sama dengan nol. Sehingga antara dua piksel tersebut akan diberi garis. Apabila selisih dari kedua piksel sama dengan nol maka antara dua piksel tersebut tidak diberi garis. Berikut visualisasi dari edge detection yang ditunjukkan pada gambar 3.6.
Gambar 3.6 Visualisasi proses edge detection
Proses ini dilakukan terhadap seluruh piksel pada citra sehingga akan membentuk suatu garis tepi dari area objek.
Gambar 3.7 Garis Tepi Membentuk Lingkaran
Setelah sistem dapat mendeteksi garis tepi dari objek, maka proses mencari center of mass dan radius dari lingkaran dapat dilakukan. Untuk mengetahui garis tepi (edge detection) dan center of mass dari objek, library OpenCV menyediakan suatu fungsi dalam pemrosesan citra digital untuk mendeteksi lingkaran yaitu cv2.HoughCircles(). Range dari minimum radius dan maksimum radius
Universitas Pertamina - 32
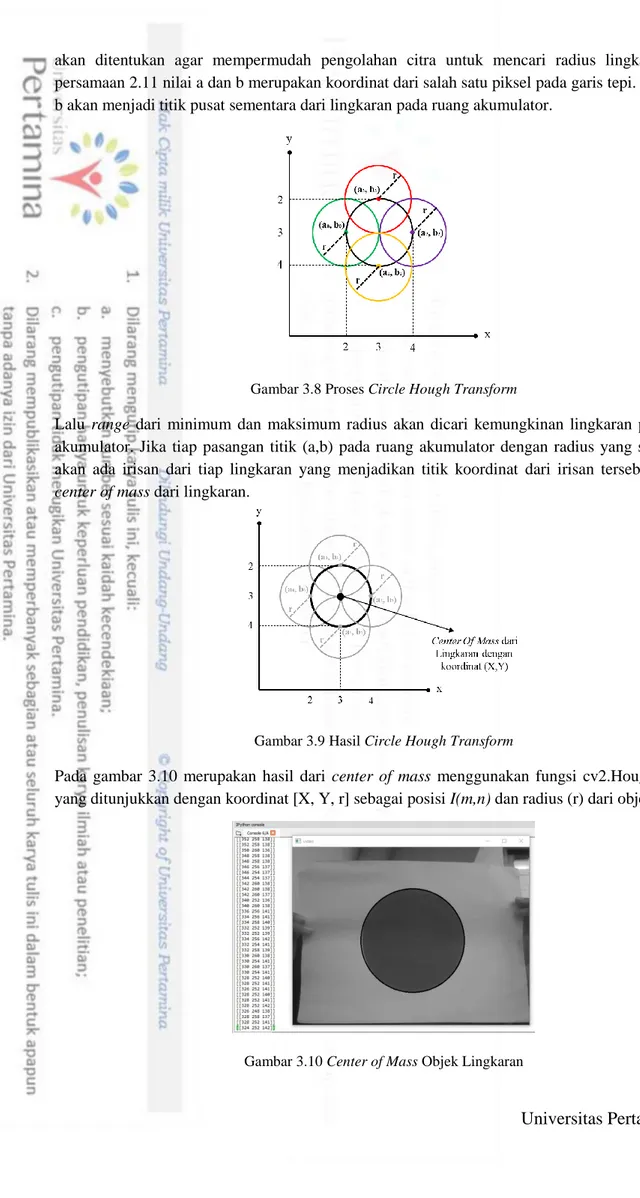
akan ditentukan agar mempermudah pengolahan citra untuk mencari radius lingkaran. Pada persamaan 2.11 nilai a dan b merupakan koordinat dari salah satu piksel pada garis tepi. Nilai a dan b akan menjadi titik pusat sementara dari lingkaran pada ruang akumulator.
Gambar 3.8 Proses Circle Hough Transform
Lalu range dari minimum dan maksimum radius akan dicari kemungkinan lingkaran pada ruang akumulator. Jika tiap pasangan titik (a,b) pada ruang akumulator dengan radius yang sama maka akan ada irisan dari tiap lingkaran yang menjadikan titik koordinat dari irisan tersebut menjadi
center of mass dari lingkaran.
Gambar 3.9 Hasil Circle Hough Transform
Pada gambar 3.10 merupakan hasil dari center of mass menggunakan fungsi cv2.HoughCircles() yang ditunjukkan dengan koordinat [X, Y, r] sebagai posisi I(m,n) dan radius (r) dari objek.
Universitas Pertamina - 33
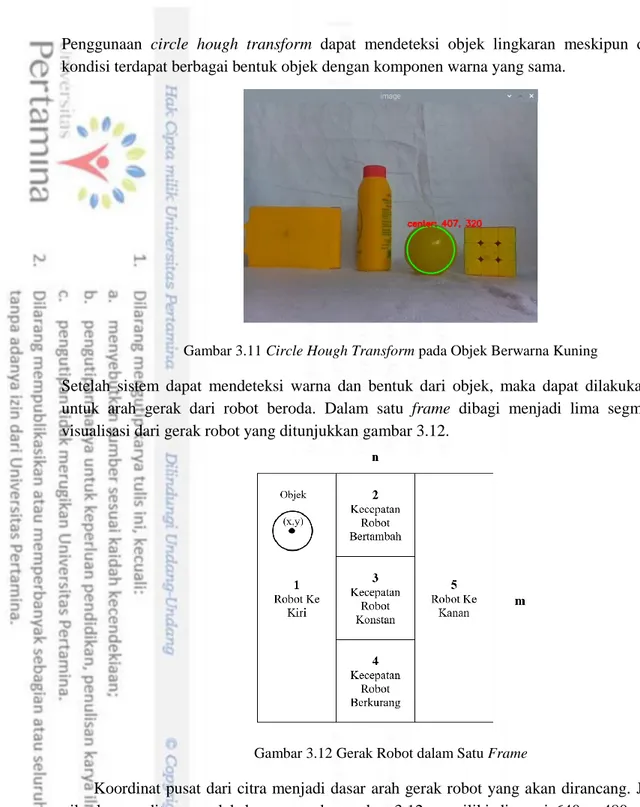
Penggunaan circle hough transform dapat mendeteksi objek lingkaran meskipun dalam suatu kondisi terdapat berbagai bentuk objek dengan komponen warna yang sama.
Gambar 3.11 Circle Hough Transform pada Objek Berwarna Kuning
Setelah sistem dapat mendeteksi warna dan bentuk dari objek, maka dapat dilakukan algoritma untuk arah gerak dari robot beroda. Dalam satu frame dibagi menjadi lima segmen. Berikut visualisasi dari gerak robot yang ditunjukkan gambar 3.12.
Gambar 3.12 Gerak Robot dalam Satu Frame
Koordinat pusat dari citra menjadi dasar arah gerak robot yang akan dirancang. Jika dimensi piksel yang ditangap oleh kamera pada gambar 3.12 memiliki dimensi 640 × 480 piksel, maka pusat koordinat dari citra tersebut ialah (320,240). Visualisasi gerak robot segmen 1 merupakan kondisi objek berada pada koordinat (0,y) sampai (110,y). Sehingga robot akan bergerak kearah kiri. Pada koordinat (530,y) hingga (640,y) pada segmen 5 robot akan bergerak kearah kanan. Radius dari objek lingkaran berpengaruh terhadap kecepatan robot. Kondisi pada segmen 2,3, dan 4 dengan koordinat (110,y) hingga (530,y) merupakan posisi objek berada tepat lurus di depan robot. Radius dari objek yang berubah-ubah menjadikan kecepatan robot bertambah, berkurang maupun konstan.
3.4
Pertimbangan Perancangan
Universitas Pertamina - 34
1. Dimensi piksel yang ditangkap oleh kamera.
Dimensi piksel yang ditangkap oleh kamera dapat mempengaruhi jarak pandang serta kecepatan
tracking robot terhadap objek. Berikut variasi ukuran dimensi piksel yang ditunjukkan oleh gambar
3.13
Gambar 3.13 Ukuran Dimensi Piksel [19]
Pada gambar 3.13 dapat dilihat berbagai ukuran dimensi piksel sehingga pada perancangan tugas akhir ini akan ditetapkan penggunaan dimensi piksel sebesar 480 × 320 piksel, 640 × 480 piksel dan 800 × 600 piksel. Ketiga dimensi piksel ini akan merepresentasikan dari ukuran dimensi piksel yang kecil, sedang dan besar. Besar atau kecil dari ukuran dimensi piksel yang ditangkap oleh kamera dapat mempengaruhi waktu komputasi dalam proses pengolahan citra.
2. Intensitas cahaya ketika robot mendeteksi warna dan bentuk dari objek.
Intensitas cahaya dapat mempengaruhi sistem kerja robot dalam mengidentifikasi warna objek. Robot akan ditempatkan pada ruangan dengan kondisi intensitas cahaya antara 0 – 600 lux. Range
intensitas cahaya tersebut digunakan berdasarkan kondisi aktual di supermarket. Representatif intensitas cahaya dilakukan terhadap lima supermarket yang berbeda. Supermarket A, B, dan C memiliki intentsitas cahaya antara 200 – 400 lux yang ditunjukan pada gambar 3.14.
Universitas Pertamina - 35
Sedangkan pada supermarket D dan E memiliki intensitas cahaya antara 300 – 600 lux yang ditunjukkan pada gambar 3.15.
Gambar 3.15 Intensitas Cahaya Aktual di Supermarket D dan E
Perbedaan nilai intensitas cahaya ini dipengaruhi oleh kondisi ruang dan bentuk bangunan supermarket itu sendiri. Pada sudut tertentu, pencahayaan di supermarket menjadi lebih redup dikarenakan cahaya terhalangi oleh benda lain. Kondisi redup pada sudut tertentu di supermarket memiliki intensitas cahaya antara 10 – 100 lux. Ketika cahaya redup atau cahaya terlalu terang, diharapkan robot masih mampu mengidentifikasi bentuk dan warna dari objek.
3. Jarak robot dengan objek.
Pada perancangan ini, robot akan diuji dari jarak 60 cm, 80 cm, dan 110 cm dari objek. Ketiga ukuran jarak ini cukup untuk merepresentasikan jarak yang dekat, menengah dan jauh dari objek. Ketika robot melakukan tracking, sistem akan dirancang agar dapat berhenti 10 cm didepan objek. Hal ini dilakukkan dengan menyesuaikan posisi konsumen hendak menaruh barang kedalam troli. Maka jarak tempuh robot melakukkan tracking yang diinginkan dari perancangan tugas akhir ini sebesar 50 cm, 70 cm dan 100 cm.
3.5
Analisis Teknis
Hasil dari perancangan berupa robot beroda dengan miniatur troli pada bagian atas robot dan kamera pada bagian depan. Untuk mengetahui akurasi robot, maka sistem akan diuji ketika robot mengidentifikasi objek berdasarkan intensitas cahaya terhadap jarak antara robot dan objek. Pengujian, intensitas cahaya akan disesuaikan dengan kondisi pencahayaan yang ada di supermarket. Robot akan diuji dengan jarak antara 0 - 150 cm dalam kondisi ruangan terang maupun redup. Ketika kondisi ruangan terlau gelap maupun terlalu terang, warna pada objek yang ditangkap oleh kamera akan berbeda sehingga mempengaruhi proses color filtering. Kemudian sistem diuji dengan perubahan variasi dimensi piksel yang menyebabkan jarak pandang yang ditangkap oleh kamera akan berubah. Kecepatan tracking maupun proses pengolahan citra akan berpengaruh jika adanya pembesaran maupun pengurangan dimensi piksel yang ditangkap oleh kamera. Pada perancangan ini bola merupakan representasi dari manusia yang menjadi objek
tracking secara aktual. Bola dengan diameter 6 cm akan merepresentasikan ukuran dari tubuh manusia. Perbandingan antara bola dengan tubuh manusia adalah 10 : 1. Sehingga pada tugas akhir ini, toleransi jarak antara prototipe robot troli dengan bola berjarak 1 cm. Kemudian kecepatan gerak robot troli melakukan tracking akan dirancang menyesuaikan kecepatan manusia ketika berjalan. Rata-rata kecepatan manusia berjalan berkisar 5 km/jam[21]. Jarak tempuh dan kecepatan
Universitas Pertamina - 36
robot akan berpenngaruh terhadap nilai settling time. Mula-mula robot akan diuji dengan jarak 60 cm, 80 cm, dan 110 cm dari objek. Jarak ini ditentukkan untuk mengetahui akurasi robot dari jarak yang dekat, menengah dan jauh dari objek. Karena jarak ideal robot troli dengan objek dirancang sejauh 10 cm maka robot diharapkan dapat berhenti di jarak 50 cm, 70 cm, dan 100 cm. Namun, karena ada perbandingan ukuran antara bola dan manusia maka hal ini akan berpengaruh kepada nilai spesifikasi dari settling time, overshoot dan steady state error. Pada spesifikasi settling time
didapat dari waktu ketika sistem mengidentifikasi objek hingga robot berhenti. Sehingga spesifikasi untuk settling time didapat dari persamaan berikut.
s t
v
(3.1)
Maka untuk jarak tempuh yang diinginkan 50 cm didapatkan settling time sebagai berikut. 0.0005
t 0.0001 jam 0.36s 5
(3.2) Karena perbandingan bola dengan manusia 10:1 maka spesifikasi settling time dengan jarak tempuh 50 cm pada tugas akhir ini adalah settling time pengujian (aktual) ≤ 3.6 s. Kemudian pada spesifikasi overshoot didapatkan dari jarak ideal robot dengan objek. Jika jarak ideal robot troli dengan manusia adalah 10 cm, maka dengan perbandingan 10:1 jarak ideal robot dengan bola adalah 1 cm. Akurasi sistem yang baik akan ditentukan jika settling time, overshoot dan steady state error dapat memenuhi spesifikasi. Visualisasi dari lintasan tracking akan ditunjukkan dari gambar 3.16.
Gambar 3.16 Visualisasi Lintasan Tracking Objek
yd merupakan jarak tempuh yang diinginkan saat robot melakukan tracking. Sedangkan ya
merupakan jarak aktual dari respon sistem melakukan tracking. Nilai overshoot dilihat dari simpangan maksimum dari gerak robot terhadap lintasan (yd). Maka, nilai overshoot dari sistem
ditunjukkan pada persamaan 3.3. (% ) a d 100% d y y Overshoot Os y (3.3)
Sehingga toleransi overshoot pada jarak tempuh 50 cm pada tugas akhir ini sebesar 59 50 (% ) 100 18% 50 cm cm Overshoot Os cm
. Settling time pada pengujian ini dilihat dari waktu
yd (desired)
ya (actual)
Robot Troli Objek
Jarak ideal antara robot dengan objek
Universitas Pertamina - 37
ketika sistem mengidentifikasi objek hingga robot berhenti melakukan tracking pada objek. Sedangkan steady state error didapat dari keadaan error dari jarak aktual respon sistem terhadap jarak yang diinginkan. Sehingga spesifikasi perancangan dapat ditunjukkan pada tabel 3.1.
Tabel 3.1 Spesifikasi Perancangan
Jarak Objek dengan Robot
Jarak Tempuh Robot (Desired)
Spesifikasi Perancangan
Settling Time Overshoot Steady State Error
60 cm 50 cm Settling time aktual ≤ 3.6 s
Overshoot
aktual ≤ 18%
Steady state error
aktual ≤ 0.18 80 cm 70 cm Settling time
aktual ≤ 5.04 s
Overshoot
aktual ≤ 12.8 %
Steady state error
aktual ≤ 0.128 110 cm 100 cm Settling time
aktual ≤ 7.2 s
Overshoot
aktual ≤ 9 %
Steady state error
aktual ≤ 0.09
3.6
Peralatan dan Bahan
Dalam proses perancangan digunakan beberapa peralatan berupa perangkat keras dan perangkat lunak yang ditunjukkan pada tabel 3.2 sebagai berikut.
Tabel 3.2 Peralatan dan bahan pada Perancangan
Perangkat Keras
No Peralatan Spesifikasi Jumlah 1. Rasberry Pi 3 Model B Broadcom BCM2387 chipset
1.2GHZ Quad-Core ARM Cortex-A53 (64 Bit)
Power : Micro USB socket 5V, 2.5 A Video Output : HDMI (rev 1.3 & 1.4)
1 unit
2. Raspberry Pi Camera Module Rev 1.3
Pixel Size: 5 MP
Omnivision 5647 Camera Module Still Picture Resolution: 2592 x 1944 15-pin MIPI Camera Serial Interface
1 unit
3. Baterai Baterai Li-Ion 18650 12 Volt 2 unit 4. Konektor HDMI to VGA - 1 unit
5. Kabel LAN - 1 unit
Universitas Pertamina - 38
Perangkat KerasNo Peralatan Spesifikasi Jumlah 7. Motor Driver (IC L293D) Input Voltage : 7 Volt
Enable Voltage : 7 Volt Peak Output Current : 1.2 A
1 unit
8. Robot Car Chassis Kit -
9. Obeng - 1 set
10. Cutter - 1 unit
11. Solder dan Timah - 1 unit
12. Tang Potong - 1 unit
Perangkat Lunak
No Nama Perangkat
1. Python 3 (IDLE)
2. Fritzing
Universitas Pertamina - 40
BAB IV
HASIL DAN PEMBAHASAN
Pada bab ini akan menampilkan hasil dan analisis dari pengaruh variasi intensitas cahaya dan dimensi piksel terhadap jarak antara robot dengan objek. Pengaruh intensitas cahaya dan dimensi piksel akan menunjukkan akurasi robot melakukan tracking terhadap objek. Hasil akurasi sistem dapat diketahui dari besar nilai settling time, overshoot dan steady state error. Pada subbab 3.4 telah dijabarkan kondisi aktual di supermarket. Secara keseluruhan dari ke-lima supermarket memiliki rata-rata intensitas cahaya 300 – 400 lux.
Tabel 4.1 Intensitas Cahaya Aktual di Supermarket
Supermarket A Supermarket B Supermarket C Supermarket D Supermarket E Intensitas Cahaya (lux)
Area Kasir 362 342 354 530 555 Area Tengah (Lorong 1) 318 341 335 498 526 Area Tengah (Lorong 2) 342 310 309 477 306 Area Belakang 296 224 260 300 287
Saat pengambilan data pada intensitas cahaya aktual di supermarket, nilai intensitas cahaya tersebut selalu berubah-ubah dikarenakan tata letak barang yang menghalagi cahaya. Sehingga pada tugas akhir ini penentuan untuk batas minimum dan maksimum HSV akan menyesuaikan kondisi intensitas cahaya 300 – 400 lux. Batas minimum dan maksimum HSV akan diatur agar sistem dapat melakukan color filtering pada intensitas cahaya 300 – 400 lux. Untuk mencari nilai
range HSV dari spesifik warna, maka dilakukan trial dan error dengan merubah-ubah nilai masing-masing Hue, Saturation, Value. Nilai hue, saturation, value akan dijadikan batas minimum dan maksimum jika sistem berhasil melakukan filter pada spesifik warna. Spesifik warna tersebut terdiri dari objek bola berwarna merah, kuning, hijau dan biru. Trial dan error akan dilakukan pada setiap spesifik warna sehingga batas minimum dan maksimum dari ruang warna HSV dalam proses
color filtering akan ditunjukkan pada tabel 4.2.
Tabel 4.2 Range dari Ruang Warna HSV
Batas Minimum Batas Maksimum
Hue (H) Saturation (S) Value (V) Hue (H) Saturation (S) Value (V) Kuning 10 70 0 50 255 255 Hijau 60 50 0 100 255 255 Merah 110 50 0 179 255 255 Biru 90 90 0 150 255 255
Universitas Pertamina - 41
4.1
Variasi Intensitas Cahaya
Pada subbab 4.1 menampilkan hasil dari sistem melakukan identifikasi warna dan bentuk yang telah melalui proses color filtering dengan adanya perubahan intensitas cahaya. Intensitas cahaya yang mengenai bola pada kondisi ruangan redup bernilai 10 Lux. Lalu kondisi ruangan yang terang dilakukan dengan intensitas cahaya antara 300 – 600 Lux.
4.1.1
Intensitas Cahaya 10 Lux
Intensitas cahaya sangat berpengaruh terhadap keberhasian color filtering dalam melakukan filter pada objek berwarna. Apabila kondisi cahaya redup mengenai objek berwarna merah, maka kamera akan menangkap objek tersebut bukanlah merah murni melainkan campuran dari komponen warna lainnnya. Maka dari itu, sistem akan diuji dalam kondisi intensitas cahaya 10 lux dengan batas range HSV pada tabel 4.2.
Gambar 4.1 Intensitas Cahaya 10 Lux
Pada intensitas cahaya 10 Lux menunjukkan sistem dapat mendeteksi setiap warna dan bentuk objek dengan baik sesuai nilai batas minimum dan maksimum pada tabel 4.1.
![Gambar 2.1 Citra dalam Koordinat Kartesian [1]](https://thumb-ap.123doks.com/thumbv2/123dok/3098720.2329033/21.892.64.794.56.1081/gambar-citra-dalam-koordinat-kartesian.webp)
![Gambar 2.5 Ruang Warna HSV[4]](https://thumb-ap.123doks.com/thumbv2/123dok/3098720.2329033/24.892.69.755.80.989/gambar-ruang-warna-hsv.webp)
![Gambar 2.12 GPIO Pin pada Raspberry Pi 3 Model B[15]](https://thumb-ap.123doks.com/thumbv2/123dok/3098720.2329033/29.892.63.697.51.1088/gambar-gpio-pin-pada-raspberry-pi-model-b.webp)