26
BAB III
PERANCANGAN DESAIN POMPA AIR BRUSHLESS DC
DENGAN MENGGUNAKAN dsPIC30F2020
3.1. Pendahuluan
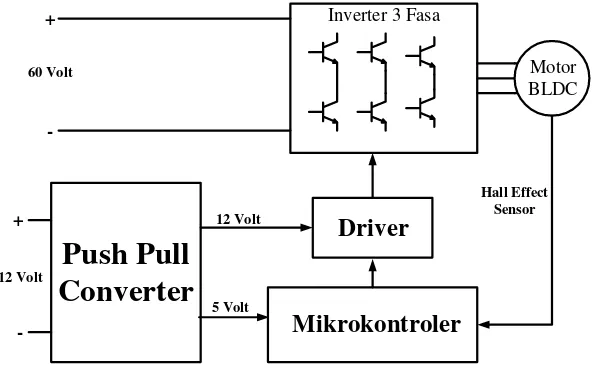
Pada bab III ini akan dijelaskan mengenai perancangan Pompa Air Brushless DC yang dikendalikan oleh Inverter tiga fasa dengan menggunakan sistem kontrol digital yang berupa mikrokontroler dsPIC30F2020. Inverter 3 fasa merupakan rangkaian daya yang berfungsi sebagai penggerak untuk motor BLDC dan Mikrokontroler atau sistem minimum dsPIC30F2020 merupakan rangkaian kontrol yang berfungsi sebagai alat kontrol digital untuk mengendalikan Inverter 3 fasa yang digunakan untuk mengendalikan Pompa Air BLDC tersebut.
3.2. Perancangan Alat
27 mikrokontroler dsPIC30F2020 mendapat suplai tegangan dari ACCU battery
sebesar 12 Volt. Driver akan mendapatkan suplai tegangan dari Push Pull Converter sebesar 12 Volt, sedangkan rangkaian sistem kontrol digital atau mikrokontroler dsPIC30F2020 mendapatkan suplai tegangan sebesar 5 Volt dari Push Pull Converter.
28
dsPIC30F2020 yang selanjutnya digunakan untuk menghasilkan sinyal masukan bagi driver yang digunakan.
Driver yang berupa 6 buah TLP 250 tersebut merupakan penggerak bagi Inverter 3 fasa supaya dapat bekerja. 6 buah TLP 250 tersebut akan mengontrol 6 buah mosfet IRFP 250 yang merupakan komponen yang digunakan dalam Inverter 3 Fasa tersebut. Cara kerjanya dengan menghidup – matikan (On – Off) 6 buah mosfet tersebut secara bergantian sehingga tersusun sistem yang terintegrasi di dalam Inverter 3 fasa yang digunakan untuk menggerakan Pompa Air BLDC tersebut.
3.3. Perancangan Push Pull Converter
Push Pull Converter merupakan catu daya yang digunakan pada Tugas Akhir ini. Rangkaian catu daya merupakan rangkaian yang digunakan untuk mensuplai tegangan bagi rangkaian driver TLP 250, rangkaian mikrokontroler dsPIC30F2020 dan buffer 74HC7541, dan juga fan. Catu daya secara umum terdiri dari dua jenis yaitu catu daya linier dan catu daya switching. Catu daya yang digunakan pada Tugas Akhir ini yang berupa Push Pull Converter merupakan salah satu jenis dari Catu daya switching.
29
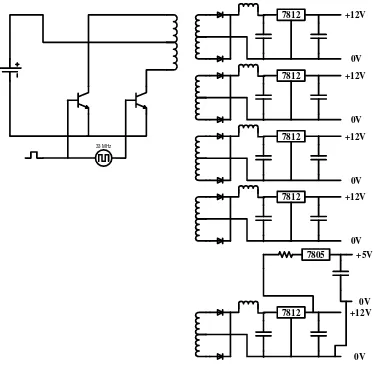
fasa untuk tetap berada pada suhu tertentu yang dianjurkan saat bekerja juga membutuhkan suplai tegangan sebesar 12 Volt, karena itu IC regulator LM7812 juga dipasang pada Push Pull Converter tersebut [8]. Berikut pada Gambar 3.2 di bawah ini ditunjukkan skema dari perancangan Push Pull Converter yang digunakan pada Tugas Akhir ini.
33 MHz
7812 +12V
0V
7812 +12V
0V
7812 +12V
0V
7812 +12V
0V
7812 +12V
0V 7805 +5V
0V
Gambar 3.2 Skema perancangan push pull converter
30
tegangan keluaran dari rangkaian Push Pull Converter digunakan untuk mencatu atau mensuplai tegangan pada rangkaian driver TLP 250 dan fan tersebut, di mana empat dari tegangan keluaran dari rangkaian Push Pull Converter yang sebesar 12 Volt tersebut digunakan untuk mencatu rangkaian driver TLP 250. Sedangkan tegangan keluaran yang sebesar 5 Volt digunakan untuk mencatu rangkaian mikrokontroler dsPIC30F2020.
3.4. Perancangan Rangkaian Driver TLP 250
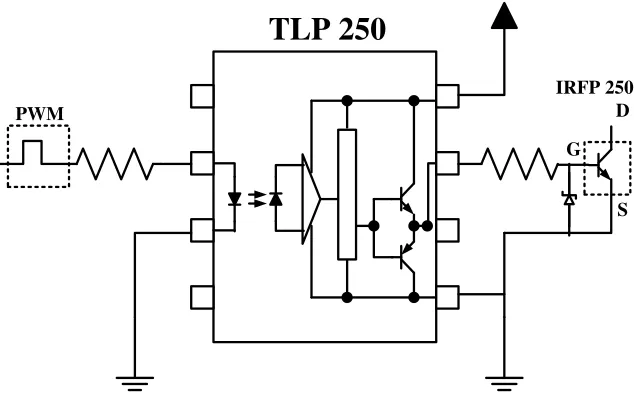
Rangkaian Driver merupakan rangkaian isolasi antara rangkaian daya yang berupa Inverter 3 fasa dengan rangkaian kontrol yang berupa mikrokontroler dsPIC30F2020. Rangkaian daya bekerja pada tegangan dan arus yang besar sedangkan rangkaian kontrol bekerja dalam tegangan dan arus yang besar. Supaya tidak terjadi sort tegangan antara 2 rangkaian ini maka dibutuhkan rangkaian driver tersebut.
31
TLP 250
PWM
G
S D IRFP 250
Gambar 3.3 Skema perancangan driver TLP 250
32
3.5. Perancangan Mikrokontroler dsPIC30F2020
Mikrokonkontroler dsPIC30F2020 merupakan sistem minimum yang digunakan pada Tugas Akhir ini. Mikrokontroler dsPIC30F2020 membutuhkan suplai tegangan sebesar 5 Volt dari rangkaian Push Pull Converter tersebut. Sinyal keluaran dari mikrokontroler akan menuju ke buffer 74HC541 untuk menjaga agar tegangan tetap pada 5 Volt sebelum menjadi sinyal masukan bagi driver yang digunakan.
Gambar 3.4 Skema perancangan sistem minimum dsPIC30F2020
33
inputan untuk buffer 74HC541 yang akan menghasilkan output berupa PWM pensaklaran.
Buffer 74HC541 membutuhkan suplai tegangan 5 Volt. 5 Volt tersebut digunakan untuk menyalakan led yang terdapat dalam TLP 250 tersebut. Led tersebut berfungsi sebagai optocoupler pada TLP 250. Pemrograman mikrokontroler dsPIC30F2020 ini menggunakan software mikroC for dsPIC
dengan menggunakan bahasa pemrograman berupa bahasa C.
3.5.1. Algoritma Pemrograman dsPIC30F2020
34
START
INISIALISASI PROGRAM
BACA HALL EFFECT SENSOR READ ADC
ADC > TMR ?
MOTORING FREEWHEELING
YES NO
Gambar 3.5 Flowchart pemrograman dsPIC30F2020
Berdasarkan pada Gambar 3.5 diatas proses pemrograman diawali dengan inisialisasi program yang dibutuhkan. Inisialisasi program yang dibutuhkan adalah inisialisasi PORT pada mikrokontroler dsPIC30F2020 dan inisialisasi
35
Pemrograman ini menggunakan fitur Timer Interrupt yang dikontrol dengan register Timer Interrupt sebagai berikut:
Pengolahan data dimulai dari nilai tegangan yang diatur dengan menggunakan potensiometer. Kemudian proses Read ADC dengan cara Register
36
Pengaturan bit pada register ADC disesuaikan dengan port input ADC. Input nilai tegangan yang diatur oleh potensiometer tersebut menggunakan pin RB2. Setelah proses Read ADC, adalah dengan melihat hasil pembacaan hall effect sensor yang mendeteksi posisi rotor.
37
Setelah itu, proses terakhir dari pemrograman adalah dengan menjalankan program apakah sebagai motoring atau freewheeling.
38
Jika nilai ADC lebih besar dari nilai Timer, maka akan terjadi proses
motoring, di mana proses saat 2 saklar (lengan fasa berbeda) yang dijalankan. Sebaliknya Jika nilai Timer lebih besar dari nilai ADC, maka yang akan terjadi proses free wheeling, di mana hanya 1 saklar saja yang bekerja. Keluaran PWM dari proses pemrograman ini akan selalu berbah – ubah tergantung input ADC yang diinginkan.