Penjejakan Multi Target pada Sistem Radar
Multi Sensor
IfanWiranto
#1, Zainudin Bonok
#2#Jurusan Teknik Elektro, Universitas Negeri Gorontalo
Jl. Jend. Soedirman no. 6, Kota Gorontalo, Indonesia
1[email protected] 2[email protected]
Abstrak — Pada sistem radar multi-sensor, beberapa dari hasil pengukuran sensor bisa tidak benar, yang disebabkan adanya kejadian tanda palsu dan miss detection. Sehingga jumlah target dan yang mana hasil pengukuran yang berasal dari target tidak diketahui secara pasti. Permasalahan menjadi bagaimana menentukan jumlah target, dimana dalam hasil pengukuran bercampur antara pengukuran yang benar (berasal dari target) dan yang tidak benar (tanda palsu). Masalah ini dikenal sebagai masalah penugasan multidimensi. Untuk menyelesaikan masalah ini diperlukan suatu metode heuristik. Dalam makalah ini ditawarkan metode Sistem Semut (Ant System) untuk menyelesaikan masalah penugasan multidimensi tersebut.
Tiga lintasan targetberbeda digunakan dalam simulasi menggunakan tiga radar identik. Diperoleh bahwa algoritma Ant Systemmampu memisahkan antara targetbenar dan tanda palsu.
Kata kunci
— penjejakan multi target, sistem semut, radar
multi-sensor
I. PENDAHULUAN
Integrasi atau penggabungan data dari beberapa sensor telah diketahui dapat meningkatkan ketelitian dalam aplikasi penjejakan target, pengawasan wilayah, atau dalam aplikasi yang bukan bidang pertahanan seperti monitoring proses industri dan diagnosis medik.[1] Pada suatu sistem radar yang terdiri dari beberapa sensor, setiap sensor dalam sekali putaran (scan) akan menghasilkan informasi berupa titik (plot) dari obyek (misalkan pesawat terbang) yang melintas di wilayah cakupan sensor tersebut. Untuk memasangkan titik-titik yang berkorespondensi dengan satu obyek yang sama dalam setiap scan diperlukan proses penjejakan. Hasil dari proses penjejakantersebut adalah lintasan obyek yang pada prinsipnya berupa posisi dan kecepatan dari titik tersebut. Selanjutnya lintasan obyek yang dihasilkan oleh proses penjejakanitu akan diteruskan pada suatu tampilan sistem.
Permasalahan yang ada dalam setiap sensor adalah adakalanya besar tegangan nois dalam sebuah sensor melebihi ambang deteksi (detection threshold). Apabila ini terjadi maka nois tersebut akan terindikasikan sebagai target. Kejadian ini disebut sebagai tanda palsu (false
alarm). Sebaliknya apabila besar tegangan sinyal dari
targetkurang dari ambang deteksi maka sensor tidak dapat mendeteksi target. Kejadian ini disebut sebagai
miss detection.Munculnya false alarm diperlihatkan pada
Gambar 1.[2], serta kejadian miss detection diperlihatkan pada Gambar.2.[2]
Gambar 1. Kejadian false alarm
Gambar 2. Kejadian miss detection
Oleh karena itu, persoalan yang muncul dalam sebuah sistem radar multi sensor adalah bagaimana menentukan jumlah target yang benar, dimana dalam hasil pengukuran bercampur antara pengukuran yang benar (berasal dari target) dan pengukuran yang tidak benar (false alarm). Masalah ini diketahui sebagai masalah penugasan multidimensi (multidimensional assignment
problem), dan untuk menyelesaikan masalah ini
diperlukan suatu algoritma pendekatan heuristik.Beberapa penelitian untuk penjejakan sasaran jamak berbasis pada metodologi pencarian untuk menyelesaikan multidimensionalassignment problem
telah dilakukan. Dalam penelitian-penelitian ini menggunakan genetic algorithm[3], dan tabu search[4].Dalam beberapa penelitian yang menerapkan
metodologi pencarian, yaitu genetic algorithm (GA),
simulated annealling (SA), dan ant colony optimization (ACO), untuk traveling salesman problem menunjukkan
bahwa ACO menghasilkan solusi yang lebih baik dibandingkan dengan algoritma yang lainnya.[5]
Ant Colony Optimization adalah suatu konsep baru
dalam kecerdasan buatan, yangmerupakan model perilaku semut yang diketahui dapat menemukan jarak terpendek antara sarang dan sumber makanan mereka. Pada makalah ini akan diuraikan bagaimana suatu sistem multi sensor mengkombinasikan data pengamatan dari beberapa sensor dan suatu metode yang disarankan untuk memisahkan antara pengukuran yang berasal dari targetdan tanda palsu.
II. MULTISENSORUNTUKPENJEJAKAN MULTITARGET
Andaikan terdapat N sensor yang digunakan untuk menemukan targetdalam suatu wilayah. Misalkan ada sejumlah targett (t tidak diketahui) dalam wilayah pengamatan tersebut, dan posisi dari target t tersebut adalah θt=(xt, yt, zt)’. Peluang deteksi dari sensor s adalah
Pds . Misalkan bahwa jumlah pengukuran dari sensor s
adalah ns, s=1,2,3,…,N. Hasil pengukuran sensor s
dinyatakan sebagai 𝑧𝑠𝑖𝑠 , is= 1,2,3,…,ns; dan dianggap
bahwa pengukuran tersebut adalah berasal dari targetsebenarnya ditambah nois Gaussian N(0,𝜎𝑠2).
Suatu targetmungkin saja tidak terdeteksi atau muncul tanda palsu pada setiap scan. Untuk mempermudah notasi dalam menggambarkan tanda palsu dan juga untukasosiasi pengukuran targetyang tidak lengkap disebabkan oleh kehilangan deteksi (miss detection) tersebut, sebuah pengukuran dummyzs0
(is=0)ditambahkan pada setiap himpunan pengukuran
dari masing-masing sensor. Suatu tanda palsu dari suatu himpunan data Z(k) dinyatakan sebagai 𝑍𝛾𝑖 dengan 𝛾𝑖=
(0,0, … ,0, 𝑖𝑘, 0, … ,0,0) , dan miss detection dinyatakan
sebagai 𝑍𝛾𝑖 dengan 𝛾𝑖=
(𝑖1, 𝑖2, … , 𝑖𝑘−1, 0, 𝑖𝑘+1, … , 𝑖𝑁−1, 𝑖𝑁).
Fungsi cost untuk mengasosiasikan suatu pengukuran N-tuple dengan suatu target t diberikan oleh
𝑐𝑖1,𝑖2…,𝑖𝑁= ∑{𝑢(𝑖𝑠)[12[𝑍𝑖𝑠− 𝜃̂]𝑇𝝈−2[ 𝑁 𝑠=1 𝑍𝑖𝑠− 𝜃̂] + 𝑙𝑛 √2𝜋𝝈 𝑷𝒅𝒔. 𝚿𝒔] −(1 − 𝑢(𝑖𝑠))𝑙𝑛[1 − 𝑃𝑑𝑠]} (1)
Denganu(is) adalah fungsi indikator, yang
mengindikasikan bahwa jika is≠0, yaitu sensor s
mendeteksi target t, maka u(is)=1,sebaliknya jika is=0,
yaitu sensor s tidak mendeteksi target t, maka u(is)=0.𝜃̂
adalah rerata pengukuran, Ψs adalah volume dari wilayah
pengamatan (field of view) sensor s.
Tujuannya adalah bahwa suatu pengukuran menyatakan sebuah target atau menyatakan tanda palsu, dan setiap
masalah ini dapat diformulasikan menjadi masalah penugasan multidimensi berikut [6]
meminimumkan: ∑ ∑ … ∑𝑛𝑖𝑁𝑁=0𝑐𝑖1,𝑖2…,𝑖𝑁 𝑛2 𝑖2=0 𝑛1 𝑖1=0 𝜒𝑖1,𝑖2…,𝑖𝑁 (2) dengan kendala: ∑ … 𝑛2 𝑖2=0 ∑ 𝜒𝑖1,𝑖2…,𝑖𝑁 𝑛𝑁 𝑖𝑁=0 = 1, 𝑖1= 1, … , 𝑛1 ∑ … 𝑛1 𝑖1=0 ∑ ∑ … ∑ 𝜒𝑖1,𝑖2…,𝑖𝑁 𝑛𝑁 𝑖𝑁=0 𝑛𝑘+1 𝑖𝑘+1=0 𝑛𝑘−1 𝑖𝑘−1=0 = 1, 𝑢𝑛𝑡𝑢𝑘 𝑖𝑘= 1, … , 𝑛𝑘 𝑑𝑎𝑛 𝑘 = 2,3, … , 𝑁 − 1 ∑ … 𝑛2 𝑖2=0 ∑ 𝜒𝑖1,𝑖2…,𝑖𝑁 𝑛𝑁−1 𝑖𝑁−1=0 = 1, 𝑖𝑁 = 1, … , 𝑛𝑁 𝜒𝑖1,𝑖2…,𝑖𝑁∈ {0,1} 𝑢𝑛𝑡𝑢𝑘 𝑠𝑒𝑚𝑢𝑎 𝑖1, … , 𝑖𝑁
dimana 𝜒𝑖1,𝑖2…,𝑖𝑁 adalah peubah asosiasi biner,
sedemikian hingga 𝜒𝑖1,𝑖2…,𝑖𝑁= 1 jika pengukuran N-tuple
diasosiasikan dengan suatu kandidat target. Sebaliknya, jika N-tuple bukan merupakan kandidat target 𝜒𝑖1,𝑖2…,𝑖𝑁=0.
III. SISTEMSEMUTUNTUKMENEMUKAN TARGET
Sistem semut (ant system) adalah salah satu algoritma dari metode ACO yang terinspirasi dari perilaku koloni semut untuk menemukan jarak terpendek antara sarang dan sumber makanan mereka. Beberapa penelitian penerapan ACO telah dilakukan, di antaranya adalah untuk solusi masalah rute kendaraan [7], tuning kontroler PI pada motor induksi tiga fase [8], kompensasi harmonik [9], dan untuk mobile ad-hoc networks [10]. Pada makalah ini ditawarkan metode ACO untuk menemukan target benar.Berikut adalah algoritma sistem semut untuk menemukan target yang benar.
Pada masalah penugasan multidimensi pada persamaan (1) dan (2), tujuannya adalah menemukan kemungkinan terbesar bahwa setiap pengukuran ditugaskan untuk satu target atau menyatakan pengukuran tersebut adalah tanda palsu. Kemungkinan terbesar yang menyatakan bahwa suatu pengukuran adalah targetdinyatakan dengan cost yang kecil. Jumlah cost yang minimum menyatakan bahwa titik-titik tersebut adalah kandidat target atau tanda palsu. Dengan demikian, masalah asosiasi data tersebut, dapat direpresentasikan dengan himpunan titik-titik cost, dimana setiap titik-titik-titik-titik tersebut menyatakan targetyang mungkin. Oleh karena itu, dalam menyelesaikan masalah di atas menggunakan optimisasi koloni semut, semut akan bergerak menuju titik-titik yang diijinkan (kendala pada persamaan (2)) sehingga mencapai jumlah cost minimum.
Berikut ini akan dijelaskan proses pencarian oleh semut: Pada siklus pertama, langkah awal adalah semut-semut (jumlah semut ditentukan sembarang) diletakkan secara acak pada titik-titik yang berbeda. Selanjutnya hingga
titik j (yang diijinkan) dengan mempertimbangkan
visibility, yaitu
𝜂𝑗=𝐶1
𝑗 (3)
dengan 𝐶𝑗 adalah cost titik j. Semut akan menuju ke titik
yang nilai visibilitynya terbesar. Titik-titik yang tidak diijinkan disimpan dalam tabu list. Setelah selesai satu siklus, isi dari tabu list direset.
Setiap selesai satu siklus, semut akan meninggalkan jejak feromon pada setiap titik yang dikunjunginya. Setelah menyelesaikan satu siklus, semut akan mati dan digantikan semut baru dengan jumlah yang sama. Pada siklus kedua dan seterusnya, semut-semut baru diletakkan pada salah satu titik yang telah dikunjungi oleh semut pada siklus sebelumnya, dan akan berpindah dari titik i ke titik j (yang diijinkan) berdasarkan pada suatu fungsi peluang, dinamai sebagai aturan transisi status, yaitu 𝑝𝑗(𝑡) = { [𝜏𝑗(𝑡)]𝛼[𝜂𝑗]𝛽 ∑𝑗∈𝑑𝑖𝑖𝑗𝑖𝑛𝑘𝑎𝑛[𝜏𝑗(𝑡)]𝛼[𝜂𝑗]𝛽 ; 𝑗𝑖𝑘𝑎 𝑗 ∈ 𝑑𝑖𝑖𝑗𝑖𝑛𝑘𝑎𝑛 0; 𝑗𝑖𝑘𝑎 𝑠𝑒𝑏𝑎𝑙𝑖𝑘𝑛𝑦𝑎 (4)
dengan 𝜏𝑗(𝑡) adalah jumlah feromonsemut pada titik j
pada saat t. Parameter α dan β digunakan untuk mengendalikan tingkat kepentingan relatif dari feromondan visibility. Dengan demikian, setelah suatu semut menyelesaikan perjalanannya dalam satu siklus, jumlah feromon akan diperbarui menjadi :
𝜏𝑗(𝑡 + 𝑁) = 𝜌𝜏𝑗(𝑡) + ∆𝜏𝑗(𝑡, 𝑡 + 𝑁) , (5)
dengan ρ adalah suatu koefisien yang bernilai antara 0 sampai 1, sedemikan hingga (1- ρ) menunjukkan penguapan feromon, dan
∆𝜏𝑗(𝑡, 𝑡 + 𝑁) = ∑𝑚𝑘=1∆𝜏𝑗𝑘(𝑡, 𝑡 + 𝑁), (6)
dengan ∆𝜏𝑗𝑘(𝑡, 𝑡 + 𝑁) adalah feromonyang ditinggalkan
oleh semut k pada titik j, pada saat antara t sampai (t+N), yang ditentukan sebagai berikut :
∆𝜏𝑗𝑘(𝑡, 𝑡 + 𝑁) = { 1
𝐿𝑘; 𝑗𝑖𝑘𝑎 𝑗 ∈ 𝑝𝑒𝑟𝑗𝑎𝑙𝑎𝑛𝑎𝑛 𝑘
0; 𝑗𝑖𝑘𝑎 𝑠𝑒𝑏𝑎𝑙𝑖𝑘𝑛𝑦𝑎 (7) dengan Lk adalah jumlah cost pada perjalanan yang
dilakukan oleh semut k. N adalah jumlah titik yang dikunjungi oleh setiap semut dalam satu siklus. Jumlah titik yang dikunjungi oleh setiap semut dalam satu siklus (N) adalah = 1 + ∑𝑠𝑖=1𝑛𝑖 . Dimana 𝑛𝑖 adalah jumlah pengukuran pada sensor ke-i dan s adalah jumlah sensor. Jumlah feromonpada saat t=0 untuk setiap titik yaitu 𝜏𝑗(0), ditentukan sama dengan nilai visibility-nya.
Algoritma akan berhenti jika semua semut telah menjalani rute yang sama.
IV. SIMULASI
Dalam pemodelan sistem radar, diandaikan bahwa sistem radar menggunakan tiga sensor untuk menemukan target. Jumlah pengukuran dari setiap sensor dinyatakan sebagai
ns, dengan s=1,2,3. Hasil pengukuran setiap sensor
dinyatakan sebagai 𝑧𝑠𝑖𝑠, is= 1,2,3,…,ns. Dengan demikian,
masalah asosiasi data dapat diformulasikan sebagai masalah penugasan multidimensi berikut,
𝑐𝑖1,𝑖2,𝑖3 = ∑{𝑢(𝑖𝑠)[ 1 2[𝑍𝑖𝑠− 𝜃̂] 𝑇 𝜎−2[ 3 𝑠=1 𝑍𝑖𝑠− 𝜃̂] + 𝑙𝑛 √2𝜋𝝈 𝑷𝒅𝒔. 𝚿𝒔] −(1 − 𝑢(𝑖𝑠))[1 − 𝑃𝑑𝑠]}, (8) meminimumkan: ∑ ∑ ∑ 𝑐𝑖1,𝑖2,𝑖3 𝑛3 𝑖3=0 𝑛2 𝑖2=0 𝑛1 𝑖1=0 𝜒𝑖1,𝑖2,𝑖3(9) dengan kendala: ∑ ∑ 𝜒𝑖1,𝑖2,𝑖3 𝑛3 𝑖3=0 𝑛2 𝑖2=0 = 1, 𝑖1= 1, … , 𝑛1 ∑ ∑ 𝜒𝑖1,𝑖2,𝑖3 𝑛3 𝑖3=0 𝑛1 𝑖1=0 = 1, 𝑖2= 1, … , 𝑛2 ∑ ∑ 𝜒𝑖1,𝑖2,𝑖3 𝑛2 𝑖2=0 𝑛1 𝑖1=0 = 1, 𝑖3= 1, … , 𝑛3 𝜒𝑖1,𝑖2,𝑖3 ∈ {0,1} 𝑢𝑛𝑡𝑢𝑘 𝑠𝑒𝑚𝑢𝑎 𝑖1, 𝑖2, 𝑖3
Masalah penugasan multidimensi di atas akan diselesaikan dengan menggunakan metode optimisasi koloni semutuntuk mendapatkan jumlah target(memisahkan antara targetyang benar dan tanda palsu).
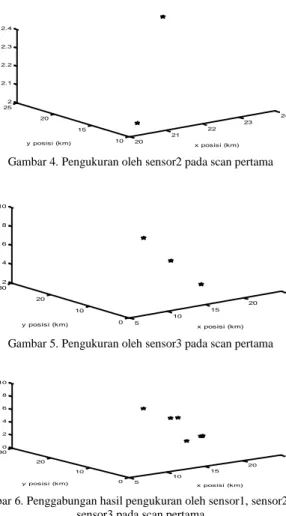
Diandaikan bahwa dalam observasi yang dilakukan oleh tiga sensor pada scan pertama, sensor1 memperoleh hasil pengukuran seperti diperlihatkan pada Gambar 3., sensor2 memperoleh hasil pengukuran seperti diperlihatkan pada Gambar 4., dan sensor3 memperoleh hasil pengukuran seperti diperlihatkan pada Gambar 5. Penggabungan dari hasil pengukuran ketiga sensor tersebut diperlihatkan pada Gambar 6.
Gambar 3. Pengukuran oleh sensor1 pada scan pertama
20.3 20.4 20.5 20.6 11 12 13 14 15 0.5 1 1.5 2 z po si si (k m ) x posisi (km) y posisi (km)
Gambar 4. Pengukuran oleh sensor2 pada scan pertama
Gambar 5. Pengukuran oleh sensor3 pada scan pertama
Gambar 6. Penggabungan hasil pengukuran oleh sensor1, sensor2 dan sensor3 pada scan pertama
Langkah berikutnya adalah memisahkan antara pengukuran yang berasal dari target dan tanda palsu. Algoritma sistem semutdigunakan untuk pemisahan tersebut dengan parameter-parameter yang digunakan adalah ρ=0,9, α=1, β=1, dan jumlah semut adalah 6. Menggunakan persamaan (8), diperoleh harga-harga cost sebagai berikut:
cost(:,:,1) =
8,8364e+005 1,7091e+006 8,7409e+005 7,3644e+005 1,708e+006 6,8193e+005 6,7575e+005 1,7831e+006 26931 cost(:,:,2) = 48721 4,7693e+005 2,691e+005 76,453 5,7434e+005 2,1885e+005 2,1849e+005 7,5381e+005 75554 cost(:,:,3) =
2,6051e+005 2,6455e+005 4,1274e+005 3,2025e+005 4,7036e+005 5,1856e+005 5,2306e+005 4,4758e+005 1,2529e+005 cost(:,:,4) =
2,7127e+005 5,9118e+005 87430 2,1969e+005 7,4992e+005 76392 76145 1,5899e+005 11,736 Harga-harga feromonawal diperoleh: feromon(:,:,1) =
1,1317e-006 5,851e-007 1,144e-006
1,4798e-006 5,6082e-007 3,7131e-005 feromon(:,:,2) =
2,0525e-005 2,0967e-006 3,7161e-006 0,01308 1,7411e-006 4,5694e-006 4,5768e-006 1,3266e-006 1,3236e-005 feromon(:,:,3) =
3,8387e-006 3,78e-006 2,4229e-006 3,1225e-006 2,126e-006 1,9284e-006 1,9118e-006 2,2343e-006 7,9817e-006 feromon(:,:,4) =
3,6863e-006 1,6915e-006 1,1438e-005 4,5519e-006 1,3335e-006 1,309e-005 1,3133e-005 6,2896e-006 0,085207
Pada siklus pertama, posisi awal semut diletakkan sembarang pada titik yang berbeda. Selanjutnya hingga akhir siklus pertama, semut akan berpindah dari titik i ke titik j (yang diijinkan) dengan mempertimbangkan jumlah feromonterbesar. Perjalanan semut-semut untuk siklus pertama diperoleh:
siklus awal = semut1: 27 36 11 30 35 18 9 34 semut2: 2 36 30 35 18 27 9 34 semut3: 3 36 11 35 18 27 34 33 semut4: 4 36 11 30 35 18 27 9 semut5: 29 36 18 27 9 34 33 10 semut6: 34 36 11 30 35 18 27 9
Angka-angka di atas mengacu pada penomoran titik-titik kunjungan sebagai berikut,
Titik(:,:,1) = 1 4 7 2 5 8 3 6 9 Titik(:,:,2) = 10 13 16 11 14 17 12 15 18 Titik(:,:,3) = 19 22 25 20 23 26 21 24 27 Titik(:,:,4) = 28 31 34 29 32 35 30 33 36
Pada siklus kedua dan seterusnya, posisi awal semut baru diletakkan pada titik kunjungan terakhir siklus semut sebelumnya, dan akan berpindah dari titik i ke titik j (yang diijinkan) berdasarkan aturan transisi status. Setiap berakhir satu siklus, nilai feromondihitung berdasarkan persamaan-persamaan (5), (6), dan (7). Algoritma berhenti jika semua semut telah menjalani rute yang sama.
Perjalanan semut-semut pada siklus terakhir diperoleh: Siklus akhir = semut1: 11 36 18 35 27 30 9 34 semut2: 11 36 18 35 27 30 9 34 semut3: 11 36 18 35 27 30 9 34 semut4: 11 36 18 35 27 30 9 34 20 21 22 23 24 10 15 20 25 2 2.1 2.2 2.3 2.4 z po si si (k m ) x posisi (km) y posisi (km) 5 10 15 20 25 0 10 20 30 2 4 6 8 10 z po si si (k m ) x posisi (km) y posisi (km) 5 10 15 20 25 0 10 20 30 0 2 4 6 8 10 z po sis i ( km ) x posisi (km) y posisi (km)
semut6: 11 36 18 35 27 30 9 34
Berdasarkan hasil perjalanan semut pada siklus terakhir tersebut, titik-titik kunjungan semut pada siklus terakhir (ditandai dengan angka 1), dapat dinyatakan sebagai berikut: (:,:,1) = 0 0 0 0 0 0 0 0 (1) (:,:,2) = 0 0 0 1 0 0 0 0 (1) (:,:,3) = 0 0 0 0 0 0 0 0 (1) (:,:,4) = 0 0 (1) 0 0 (1) (1) (0) (1)
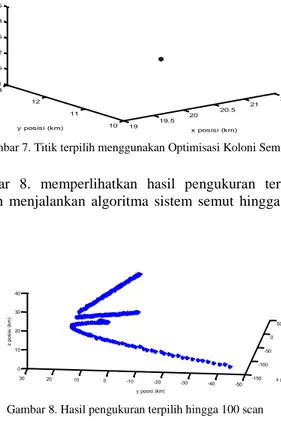
Tanda kurung menyatakan titik-titik pada daerah tanda palsu. Angka 1 bertanda kurung menunjukkan tanda palsu, sedangkan angka 1 yang tidak bertanda kurung menunjukkan hasil pengukuran yang berasal dari target. Jadi, pengukuran N-tuple yang berasal dari target terletak pada titik (2,1,2), yang nilai reratanya diperlihatkan pada Gambar 7.
Gambar 7. Titik terpilih menggunakan Optimisasi Koloni Semut
Gambar 8. memperlihatkan hasil pengukuran terpilih setelah menjalankan algoritma sistem semut hingga 100
scan.
Gambar 8. Hasil pengukuran terpilih hingga 100 scan
V. KESIMPULAN
Pada penelitian ini telah berhasil diterapkan algoritma sistem semut untuk menyelesaikan masalah penugasan multidimensi yang terjadi pada sistem radar multi sensor. Sistem semut mampu menentukan yang mana hasil pengukuran yang berasal dari target dan mana yang merupakan tanda palsu. Penelitian dilakukan untuk tiga target dengan manuver yang berbeda.
Tahapan selanjutnya yang akan dilakukan dalam penelitian ini adalah mengestimasi keadaan target yaitu posisi, kecepatan dan percepatan masing-masing target.
DAFTARPUSTAKA
[1] D.L. Hall and J. Llinas, Multisensor Data Fusion, Handbook of
Multisensor Data Fusion, New York,CRC Press, 2001, hal. 1-10
[2] G.W. Stimson, Introduction to Airborne Radar,2nd Ed., New
York, Scitech Publishing Inc., 1998.
[3] G. Chen, L. Hong,A Genetic Algorithm based Multi-dimensional
Data Association Algorithm for Multi-sensor Multi-target Tracking, Pergamon, Mathl. Comput. Modelling, 1997,Vol. 26,
No. 4: hal. 57-69.
[4] I. Turkmen, K. Guney Tabu searh tracker with adaptive
neuro-fuzzy inference system for multiple target tracking, Progress In
Electromagnetics Research, PIER , 2006, hal. 169-185. [5] E. Bonabeau, M. Dorigo, G. Theraulaz,Swarm Intelligence: from
natural to artificial systems, New York,Oxford University Press,
1999.
[6] R.L. Popp, K.R. Pattipati, Y. Bar-Shalom, m-Best S-D
Assignment Algorithm with Application to Multitarget Tracking,
IEEE Transactions on Aerospace and Electronic Systems, 2001, Vol. 37, No. 1, hal. 22-39.
[7] T. Pellonpera, Ant Colony Optimization and The Vihicle Routing
Problem, University of Tampere, School of Informatics Sciences,
2014, M.Sc. Thesis.
[8] J. Kour, S. Tiwari, Performance Comparison of Variants of Ant
Colony Optimization Technique for Online Tuning of a PI Controller for a Three Phase Induction Motor Drive,
International Journal of Computer Science and Information Technologies, 2014, Vol. 5(4), hal. 5814-5820.
[9] A.K. Tiwari, S.P. Dubey, Ant Colony Optimization Based Hybrid
Active Power Filter for Harmonic Compensation, International
Conference on Electrical, Electronics, and Optimization Techniques, 2016.
[10] S. Jena, J.K. Lakra, Application of Ant Colony Optimization
Technique for MANETS, National Institute of Technology
Rourkela, 2009, Bachelor Thesis.
19 19.5 20 20.5 21 21.5 10 11 12 13 1 1.5 2 2.5 3 3.5 z po si si (k m ) x posisi (km) y posisi (km) -150 -100 -50 0 50 -50 -40 -30 -20 -10 0 10 20 30 0 10 20 30 40 x posisi (km) y posisi (km) z p o s is i (k m )