SKRIPSI
RANCANG BANGUN SISTEM KENDALI PENENDANG BOLA DENGAN SOLENOIDA PADA ROBOT SEPAK BOLA BERODA
Diajukan untuk memenuhi salah satu persyaratan dalam menyelesaikan pendidikan sarjana (S-1) pada Departemen Teknik Elektro
Oleh Jepi Dwiansyah NIM. 160402051
DEPARTEMEN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA MEDAN
2020
ABSTRAK
Penendang solenoida membutuhkan sebuah pengendali agar dapat menendang bola secara otomatis ketika dalam pertandingan. Pada penelitian ini sistem kendali akan dibuat menggunakan mikrokontroler arduino nano yang berfungsi untuk mengatur kuat tendangan yang harus dihasilkan oleh robot, arduino nano akan mengatur rele magnetik yang berfungsi sebagai saklar untuk mengisi ataupun melepaskan muatan dalam kapasitor, pengisisan kapasitor menggunakan DC Booster dan muatan yang tersimpan akan dialirkan ke solenoida hingga tercipta tendangan , arduino nano juga dituntut untuk dapat membaca perintah yang diberikan oleh arduino mega yang bertindak sebagai master dari robot sepak bola beroda. Berdasarkan hasil penelitian yang dilakukan, ada perbedaan kecepatan antara percobaan dengan perhitungan dengan persentase kesalahan yang terus menurun pada tegangan 50-250 V. Durasi waktu yang dibutuhkan oleh sistem kendali ini dalam mempersiapkan tendangan kickoff, dropped ball, bola gawang, dan corner secara berturut-turut adalah 5.8s, 5.8s, 7.2s, dan 4.9s. Adapun selisih durasi pengiriman perintah oleh arduino mega dan penerimaan oleh arduino nano adalah sebesar 30ms .
Kata kunci : Sistem Kendali, Arduino, Rele, Kapasitor, DC Booster
KATA PENGANTAR
Segala puji dan syukur penulis panjatkan kehadirat Allah SWT, karena atas berkat rahmat dan berkat-Nya Skripsi ini dapat disusun dan diselesaikan.
Skripsi ini merupakan bagian dari kurikulum yang harus diselesaikan untuk memenuhi persyaratan dalam menyelesaikan pendidikan Sarjana Strata Satu di Departemen Teknik Elektro, Universitas Sumatera Utara. Adapun judul Skripsi ini adalah :
“RANCANG BANGUN SISTEM KENDALI PENENDANG BOLA DENGAN SOLENOIDA PADA ROBOT SEPAK BOLA BERODA”
Skripsi ini penulis persembahkan kepada orangtua yang teristimewa yaitu ayahanda Sofian Efendi dan ibunda Siti Aisyah yang selalu memberikan semangat, dukungan dan mendoakan penulis selama masa studi hingga menyelesaikan Skripsi ini.
Selama masa kuliah hingga penyelesaian Skripsi ini, penulis juga banyak mendapatkan dukungan maupun bantuan dari berbagai pihak. Untuk itu penulis ingin menyampaikan rasa terima kasih yang mendalam kepada:
1. Bapak Ir.Riswan Dinzi, MT selaku Dosen Pembimbing Skripsi yang telah banyak meluangkan waktu dan pikirannya untuk selalu memberikan bantuan, bimbingan, dan pengarahan kepada penulis selama perkuliahan hingga penyusunan Skripsi ini.
2. Bapak Ir. Zulkarnaen Pane MT selaku Dosen Penguji Skripsi yang telah memberikan banyak masukan demi perbaikan Skripsi ini.
3. Bapak Tigor Hamonangan Nasution, ST, MT selaku Dosen Penguji Skripsi yang telah memberikan banyak masukan demi perbaikan Skripsi ini.
4. Bapak Dr. Ali Hanafiah Rambe, ST, MT selaku Dosen Wali penulis yang telah banyak memberikan bimbingan selama perkuliahan.
5. Seluruh Bapak dan Ibu dosen yang telah mendidik serta memberikan pengalaman hidup yang berharga selama masa perkuliahan kepada penulis.
6. Seluruh staf pegawai Departemen Teknik Elektro FT USU Kak Fika, Pak Darsono, Kak Umi dan Bang Divo yang telah membantu penulis dalam pengurusan administrasi.
7. Kepada kakak saya Anggi Agustianti yang telah banyak memberi bantuan secara moril maupun materil.
8. Kepada teman saya Risky Juanda Daulay, Fajar Ramadhan, dan Chairul Fahmi Nasution yang telah banyak memberi bantuan secara moril maupun materil.
9. Kepada teman saya Amiril Abror Nasution, Rahmat Ridho, dan Abangda Muhammad Shobir Irsan yang telah banyak memberi bantuan secara moril maupun materil.
10. Kepada seluruh anggota tim robotik sepak bola beroda si-Hatop Universitas Sumatera Utara
11. Kepada Keluarga, Kerabat, dan teman lainnya yang telah banyak membantu penulis dalam menyelesaikan studi yang tidak dapat disebutkan satu persatu.
Saran dan kritik dari pembaca sangat penulis harapkan untuk menyem- purnakan dan mengembangkan kajian dalam bidang terkait skripsi ini. Akhir kata, penulis berharap semoga skripsi ini dapat bermanfaat bagi pembacanya.
Medan, 30 Juli 2020 Penulis,
Jepi Dwiansyah 160402051
DAFTAR ISI
ABSTRAK ... i
KATA PENGANTAR ... ii
DAFTAR ISI ...iv
DAFTAR GAMBAR ...vi
DAFTAR TABEL ... vii
BAB I PENDAHULUAN ... 1
1.1 Latar Belakang ... 1
1.2 Rumusan Masalah ... 2
1.3 Tujuan Penelitian ... 2
1.4 Batasan Masalah ... 2
1.5 Manfaat Penelitian ... 3
1.6 Tahap Proses Perancangan Alat ... 3
1.7 Skematika Pembahasan ... 4
BAB II DASAR TEORI ... 5
2.1 KRSBI Beroda ... 5
2.2 Sistem Penendang ... 6
2.3 Kondisi Robot Untuk dapat Menendang ... 7
2.4 Solenoida... 9
2.5 Kapasitor ... 11
2.6 DC Booster... 12
2.7 Rele Magnetik ... 13
2.8 Sistem Kendali ... 15
2.9 Arduino ... 16
BAB III PERANCANGAN SISTEM ... 18
3.1 Alat dan Bahan Penelitian ... 18
3.2 Waktu dan Tempat Penelitian ... 18
3.3 Tahap Proses Perancangan Alat ... 19
3.4 Prosedur Pengujian dan Pengambilan Data ... 20
3.5 Perancangan Alat Kendali ... 22
3.6 Perancangan Sistem ... 25
3.7 Perancangan Rangkaian Pengendali ... 25
3.8 Perancangan Rangkaian Pengendali Rele ... 26
3.9 Perancangan Rangkaian Pengujian Pengisian Kapasitor ... 27
3.10 Perancangan Rangkaian Pengujian Kecepatan ... 28
BAB IV PENGUJIAN DAN ANALISIS ... 29
4.1 Perancangan Sistem Kendali ... 29
4.2 Pengujian Durasi Pengisian Kapasitor ... 30
4.3 Pengujian Kecepatan Tendangan ... 31
4.4 Pengujian Komunikasi Arduino Mega dan Arduino Nano ... 44
BAB V KESIMPULAN DAN SARAN ... 47
5.1 Kesimpulan ... 47
5.2 Saran ... 47
DAFTAR PUSTAKA ... 49
LAMPIRAN ... 51
DAFTAR GAMBAR
Gambar 2. 1 Medan magnet pada kawat berarus ... 10
Gambar 2. 2 Garis-garis gaya magnet pada solenoida ... 10
Gambar 2. 3 Kapasitor ... 12
Gambar 2. 4 Rangkaian DC Booster ... 13
Gambar 2. 5 Rele Magnetik ... 14
Gambar 2. 6 Rangkaian dalam rele Omron G8P ... 14
Gambar 2. 7 Kendali close loop ... 15
Gambar 2. 8 Kendali Open Loop ... 15
Gambar 2. 9 Arduino Nano ... 17
Gambar 2. 10 Arduino Mega ... 17
Gambar 3. 1 Diagram alir tahapan penelitian ... 20
Gambar 3. 2 Diagram alir prosedur pengujian sistem... 21
Gambar 3. 3 Blok diagram rancangan umum robot sepak bola ... 22
Gambar 3. 4 Blok diagram ... 23
Gambar 3. 5 Rangkaian alat ... 25
Gambar 3. 6 Rangkaian Pengendali Penendang Solenoida ... 26
Gambar 3. 7 Rangkaian Pengendali Rele ... 27
Gambar 3. 8 Rangkaian Pengujian Pengisian Kapasitor ... 28
Gambar 4. 1 Pengendali rele ... 29
Gambar 4. 2 Pengendali penendang solenoida ... 29
Gambar 4. 3 Grafik V vs t ... 31
Gambar 4. 4 Grafik E loss vs V ... 35
Gambar 4. 5 Hasil Komunikasi Data ... 46
DAFTAR TABEL
Tabel 2. 1 Perbandingan 3 jenis sistem penendang... 7
Tabel 2. 2 Spesifikasi Rele Omron G8P ... 14
Tabel 4. 1 Data Hasil Pengujian Durasi Pengisian Kapasitor ... 30
Tabel 4. 2 Pengujian Kecepatan Tendangan ... 31
Tabel 4. 3 Data energi yang hilang terhadap nilai tegangan pada kapasitor ... 34
Tabel 4. 4 Nilai kecepatan secara perhitungan... 37
Tabel 4. 5 Hasil data persentase kesalahan ... 43
BAB I PENDAHULUAN
1.1 Latar Belakang
Kontes robot sepak bola beroda indonesia (KRSBI) adalah salah satu divisi dari 6 divisi Kontes Robot Indonesia (KRI) yang diselengarakan setiap tahunnya oleh Kementrian Riset, Teknologi dan Pendidikan Tinggi. KRSBI memiliki acuan pertandingan berdasarkan aturan di RoboCup Middle Size League (MSL) yang menyesuaikan dengan kondisi yang ada di Indonesia seperti ukuran lapangan dan lainnya, KRSBI dihadirkan untuk mempersiapkan Indonesai dalam mengikuti piala dunia robot sepak bola beroda tahun 2050[1].
Aturan umum pada KRSBI dalam sistem penendang bola diperbolehkan menggunakan 3 jenis penendang yaitu dengan pegas, pneumatik, atau solenoida.
Penendang dengan sistem pegas memiliki kekurangan yaitu membutuhkan ruang yang besar, sistem lebih rumit, dan berat, penendang dengan sistem pneumatik memilki kekurangan yaitu jumlah tendangan yang sedikit, kekuatan tendangan yang lemah, dan membutuhkan ruang yang besar, sedangkan sistem penendang dengan solenoida memilki tendangan yang kuat, ruang yang lebih sedikit, dan mampu menendang berkali-kali[2].
Pada pertandingan KRSBI robot akan berjalan secara otomatis tanpa ada dikontrol dari luar lapangan [1], untuk hal ini sitem penendang harus mampu menendang secara otomatis ketika robot sudah siap untuk menedang bola. Sistem penendang solenoida membutuhkan sistem kendali untuk dapat menendang bola, sistem kendali pada penendang solenoida akan mempengaruhi kuat tendangan, durasi untuk persiapan menendang, dan juga jumlah energi yang digunakan untuk menendang pada masing-masing jenis tendangan tergantung dengan posisi robot sepak bola beroda [2].
Penelitian mengenai penendang dengan solenoid telah dibahas sebelumnya seperti pada penelitian [3] yang membahas tentang membangun dua buah solenoida untuk menghasilkan tendangan yang lebih kuat, atau pada penelitian [4]
yang mensimulasikan kekuatan tendangan solenoida menggunakan software Atpdraw.
Fokus penelitian ini adalah membangun sebuah sistem kendali untuk sistem penendang solenoida pada robot sepak bola beroda dimana pengendalian tendangan akan menggunakan board mikrokontroler Arduino yang akan mengatur rele sebagai saklar penghubung antara DC Booster dengan kapasitor dan penghubung antara kapasitor dengan solenoida. Arduino juga akan berperan untuk menerima informasi posisi robot dari mikrokontrooler lain sehingga dapat mengatur tendangan yang harus dihasilkan oleh penendang solenoida.
1.2 Rumusan Masalah
Berdasarkan latar belakang yang telah dijelaskan sebelumnya, maka permasalahan yang dibahas adalah sebagai berikut :
1. Bagaimana membangun sistem kendali penendang solenoida?
2. Berapa durasi yang dibutuhkan dalam mempersiapkan tendangan untuk setiap jenis tendangan?
1.3 Tujuan Penelitian
Berdasarkan rumusan masalah skripsi ini bertujuan untuk membangun sebuah sistem kendali untuk penendang solenoida pada robot sepak bola beroda.
1.4 Batasan Masalah
Untuk mengatasi meluasanya pokok pembahasan, maka pada skripsi ini peneliti membuat batasan masalah dan ruang lingkup sebagai berikut:
1. Rancangan ini menggunakan arduino nano sebagai pengendali dan pengatur tendangan dan mengendalikan satu buah rele magnetik.
2. Rancangan ini menggunakan arduino mega sebagai pemberi perintah mendang dan seberapa kuat tendangan yang diperlukan.
3. Pengujian menggunakan tegangan dengan nilai 0 – 300 V.
4. Penendang yang akan diuji adalah penendang yang terdapat pada robot sepak bola beroda Universitas Sumatera Utara.
5. Pengujian menyesuaikan dengan peraturan yang terdapat pada buku panduan KRSBI seperti luas lapangan, ukuran bola, dan kondisi bola mati.
1.5 Manfaat Penelitian
Adapun manfaat dari penelitian ini adalah mampu membuat sebuah sistem kendali untuk penendang solenoida sehingga dapat digunakan pada robot sepak bola beroda dalam mengikuti kompetisi.
1.6 Tahap Proses Perancangan Alat
Adapun tahapan proses perancangan alat adalah sebagai berikut :
• Studi Literatur
Tahapan ini meliputi pencarian informasi mengenai KRSBI, Sistem penendang pada KRSBI,dan pengendalian sistem penendang solenoida, dilakukan dengan cara membaca buku, jurnal-jurnal, dan berdiskusi.
• Penentuan Alat dan Bahan
Penentuan alat dan bahan ditentukan berdasarkan hasil dari studi literatur dan juga melihat kodisi robot sepak bola Universitas Sumatera Utara yag dijadikan sebagai objek pengujian. Alat dan bahan dipilih dengan tepat agar tidak terjadi kerusakan ataupun kesalahan fungsi dari sistem kendali yang akan dibangun.
• Perancangan Rangkaian Elektronik
Perancangan Rangkaian Elektronika dilakukan setelah menentukan semua bahan yang akan digunakan dalam membuat sistem kendali sehingga dapat diketahui dimana saja komponen yang diperlukan akan diletakkan dan juga dapat memberikan suplai yang cukup sesuai dengan kebutuhan masing-masing komponen.
• Pengujian dan Pengambilan Data
Pengujian dan Pengambilan data baru bisa dilakukan setelah rangkaian elektronika selesai dibangun dan juga semua kebutuhan untuk pengambilan data sudah terpenuhi. Adapun data yang akan diambil adalah data durasi pengisian kapasitor dan juga kecepatan bola hasil tendangan.
1.7 Skematika Pembahasan BAB I : PENDAHULUAN
Bab ini menjelaskan mengenai latar belakang, rumusan masalah, tujuan penelitian, batasan masalah, Tahap Proses Perancangan Alat dan sistematika penulisan.
BAB II : DASAR TEORI
Bab ini membahas tentang KRSBI Beroda, Solenoida, Kapasitor, DC Booster, Rele Magnetik, dan Arduino.
BAB III : PERANCANGAN SISTEM
Bab ini menjelaskan tentang perancangan sistem mulai dari blok diagram sampai perancangan alat.
BAB IV : PENGUJIAN DAN ANALISIS
Bab ini membahas tentang pengujian dan analisis terhadap sistem yang telah dirancang.
BAB V : PENUTUP
Bab ini berisi tentang kesimpulan dan saran dari penelitian yang dilakukan.
BAB II DASAR TEORI
2.1 KRSBI Beroda
KRSBI adalah sebuah kontes robot yang merupakan bagian dari perlombaan KRI yang diselenggarakan oleh KEMENRISTEK DIKTI setiap tahunnya. Robot sepak bola terdiri dari maksimal 3 robot yang terdiri atas 2 penyerang dan 1 robot kiper. Selama pertandingan robot akan berjalan secara otomatis tanpa dikontrol oleh manusia dari luar lapangan[1]. Adapun aturan umum pada KRSBI meliputi beberapa hal sebagai berikut :
1. Kondisi lapangan KRSBI tahun 2019 memiliki luas lapangan adalah 6x9 m (1/2 luas lapangan MSL). Sedangkan untuk gawang memiliki lebar 2m dan tinggi 1m.
2. Bola yang digunakan memiliki jenis bola futsal dengan ukuran bola no. 4 , keliling bola 63-66 cm dan berdiameter 20-21 cm, bola ini memiliki berat 400 g, dan berwarna jingga.
3. Robot sepak bola memiliki ukuran minimum 30 x 30 cm dan maksimum 52 x 52 cm dengan tinggi 40 cm minimum dan 80 cm maksimum untuk robot penyerang, sedangkan untuk robot kiper boleh memiliki lebar maksimum 60 x 60 cm dan tinggi maksimum 90 cm namun dalam waktu 1 detik saja dan hanya boleh keatas saja, atau kekanan maupun kekiri saja dalam 1 waktu. Batas maksimum berat robot yaitu 40 Kg.
4. Posisi kick-off , Dropped Ball , Bola Gawang, dan Corner secara berturut- turut memiliki jarak dengan Gawang musuh sebesar 4.5 m, 4.7 m, 7.6 m, dan 3.6 m.
Indikator kemenangan dari KRSBI beroda adalah dari banyaknya jumlah gol yang diraih dari tim lawan, tim dengan perolehan gol yang paling banyak akan memenangkan pertandingan. Untuk itu sistem kendali untuk penendang yang baik menjadi salah satu kunci kemenangan dalam KRSBI beroda[1].
2.2 Sistem Penendang
Pada KRSBI Beroda Sejauh ini ada tiga buah mekanisme penendang yang digunakan dalam KRSBI beroda[2] yaitu :
1. Penendang dengan menggunakan pegas
Penendang dengan jenis ini menggunakan pegas sebagai media untuk menyimpan energi potensial, pegas terhubung dengan besi yang digunakan sebagai media penendang bola, pegas yang sebelumnya menyimpan energi potensial dalam bentuk tertekan ataupun tertarik akan melepaskan posisi tersebut sehingga energi potensial akan berubah menjadi energi kinetik, pada akhirnya penendang akan bergerak dan menumbuk bola. Pada sistem ini untuk dapat menyimpan energi pada pegas maka digunakan motor dc yang berfungsi untuk menarik ataupun mendorong pegas, untuk mendapatkan tendangan yang kuat maka diperlukan pegas dengan konstanta pegas yang tinggi, semakin tinggi konstanta pegas maka torsi motor yang diperlukan juga harus semakin besar agar motor dc mampu menarik ataupun mendorong pegas.
2. Penendang dengan menggunakan pneumatik
Penendang dengan jenis ini menggunakan tekanan udara, udara dengan tekanan akan disimpan di dalam sebuah tabung atau botol sebelum pertandingan dimulai, untuk bisa menghasilkan tendangan yang banyak maka diperlukan ukuran tabung atau botol yang besar pula. Tekanan udara pada tempat penyimpanan akan disalurkan menuju penendang sehingga penendang akan bergerak dan menumbuk bola.
3. Penendang dengan menggunakan Solenoida
Penendang dengan jenis ini menggunakan prinsip solenoid yang dialiri oleh arus listrik sehingga timbul medan magnet, di tengah-tengah dari solenoid diberi material yang bersifat feromagnetik sehingga material yang berada ditengah solenoid akan bergerak dan menumbuk bola.
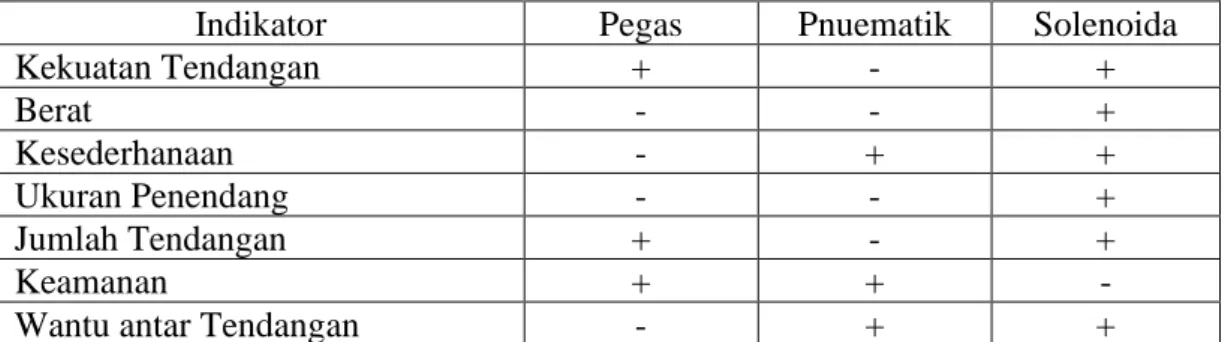
Masing-masing dari sistem penendang memiliki kelebihan dan kekurangannya masing – masing seperti yang ditunjukkan pada Tabel 2.1 berikut.
Tabel 2. 1 Perbandingan 3 jenis sistem penendang
Indikator Pegas Pnuematik Solenoida
Kekuatan Tendangan + - +
Berat - - +
Kesederhanaan - + +
Ukuran Penendang - - +
Jumlah Tendangan + - +
Keamanan + + -
Wantu antar Tendangan - + +
Penendang dengan sistem pegas menghasilkan tendangan yang kuat, mampu mendang berkali-kali dan mempunyai sistem yang aman, namun penendang jenis ini membuat robot harus memiliki bobot yang berat, ukuran penendang yang besar. Penendang dengan sistem pneumatik memiliki sistem yang sederhana, aman untuk digunakan dan juga durasi tiap tendangannya hanya sebentar sehingga mampu menendang secara cepat, namun sistem penendang ini memiliki tendangan yang lemah dan bobot yang berat yang menyebabkan ukuran robot menjadi besar, sistem ini juga memiliki jumlah tendangan yang terbatas.
Sedangkan penendang dengan solenoida hanya memiliki satu kelemahan yaitu dari segi keamanan karne menggunakan suplai dengan tegangan yang tinggi mencapai 450 V.
2.3 Kondisi Robot Untuk dapat Menendang
Robot diharapkan untuk menendang bola jika memenuhi syarat berikut:
• Robot sedang memegang bola
• Robot sudah mengarah ke gawang jika ingin mencetak gol atau mengarah ke robot teman jika ingin mengoper
• Robot mengetahui posisi dirinya di lapangan agar dapat mengatur kuat tendangan
Adapun kecepatan bola yang diharapkan dapat dihasilkan oleh robot adalah ditentukan sebagai berikut :
• Anggap respon robot penjaga gawang musuh dapat merespon bola dalam waktu 0.5 s
• Maka kecepatan bola yang diharapkan adalah jarak robot dengan gawang dibagi dengan respon robot penjaga gawang
• Atau dapat ditentukan dengan Persamaan 2.1 berikut :
𝑣 =
𝑠𝑡
𝑚 𝑠 ⁄
2.1Dimana :
v = kecepatan bola
s = jarak bola dengan gawang
t = waktu respon robot penjaga gawang (0.5 s)
Sebagai contoh jika panjang lapangan pertandingan adalah 9 m, maka jika bola ditendang dari tengah lapangan kecepatan bola yang harus dimiliki oleh robot adalah
𝑣 = 4.5
0.5= 9 𝑚 𝑠⁄
Sehingga energi yang dibutuhkan oleh robot untuk menghasilkan tendangan sebesar 9 m/s ditentukan berdasarkan Persamaan 2.2 berikut:
𝐸 = 1 2⁄ 𝑚𝑣2 + 1 2⁄ 𝐼𝜔2 2.2 Dimana :
E = Energi yang dibutuhkan m = massa bola
v = kecepatan bola
I = momen inersia bola berongga ω = kecepatan sudut bola
Massa bola adalah 400 g sesuai dengan aturan dalam KRSBI 2019, kecepatan bola adalah 9 m/s, momen inersia bola berongga adalah 2/3 mR2 , dimana nilai R adalah 10 cm sesuai dengan aturan dalam KRSBI, dan kecepatan sudut bola adalah v/R. Maka dengan memasukkan nilai-nilai tersebut kedalam persamaan energi, didapatkan besar energi yang dibutuhkan untuk bola dapat masuk ke gawang tanpa direspon oleh robot penjaga gawang lawan adalah sebagai berikut :
𝐸 = 1 2⁄ 𝑚 𝑣2 + 1 2⁄ 2 3⁄ 𝑚 𝑅2(𝑣
𝑅)2 𝐸 = 1 2⁄ 𝑥0.4𝑥 92 + 1 2⁄ 2 3⁄ 0.4 0.12(9𝑥0.1)2
𝐸 = 16.2 + 10.8
𝐸 = 27 𝐽
Untuk dapat menendang bola dengan kecepatan 9 m/s maka energi yang dibutuhkan oleh solenoida adalah sebesar 27 J. Solenoida akan mendapatkan energi dari kapasitor apabila solenoida nantinya dihubungkan dengan kapasitor yang sebelumnya sudah diisi oleh DC Booster melalui sebuah rele yang diatur oleh sistem kendali
2.4 Solenoida
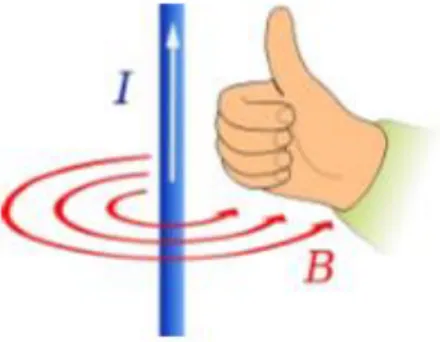
Solenoida adalah sebuah kawat konduktor yang dililitkan sehingga berbentuk silinder. Solenoida jika dialiri oleh arus listrik maka akan timbul medan magnet didalam solenoida. Hal ini mengacu kepada hukum biot-savart dimana ketika ada konduktor yang dialiri oleh arus listrik maka disekitar konduktor akan timbul medan magnet yang arahnya sesuai dengan kaidah tangan kanan[5].
Adapun gambar dari medan magnet yang dihasilkan oleh kawat berarus ditunjukkan pada Gambar 2.1 berikut.
Gambar 2. 1 Medan magnet pada kawat berarus
Adapun persamaan untuk kuat medan magnet di sekitar kawat konduktor ditunjukkan pada Persamaan 2.3 berikut :
𝐵 =
𝑢04𝜋
∫
𝑟𝐼2𝑑𝑙 𝑥 𝑟̂
2.3Dimana :
B = medan magnetik dalam tesla (T);
μ0 = permeabilitas ruang hampa;
I = kuat arus listrik (A);
r = jarak konduktor ke titik acuan (m) dl = perubahan elemen panjang (m);
Adapun apabila kawat dililit membentuk solenoida maka garis-garis gaya magnet akan muncul seperti yang terlihat pada Gambar 2.2 berikut.
Gambar 2. 2 Garis-garis gaya magnet pada solenoida
Sedangkan untuk persamaan medan magnet pada solenoid ditunjukkan pada Persamaan 2.4 berikut :
𝐵
𝑝𝑢𝑠𝑎𝑡=
𝑢0 𝐼 𝑁𝑙 2.4
Dimana :
N = Jumlah lilitan l = panjang solenoida
Dari persamaan diatas dapat diketahui bahwa besar medan magnet pad solenoida berbanding lurus dengan jumlah lilitan (N), dan besar arus yang mengalir pada solenoida (I), namun berbanding terbalik dengan panjang dari solenoida (l). Solenoida dapat dibentuk menjadi satu lapis lilitan ataupun banyak lapisan, biasanya untuk menghasilkan medan magnet yang lebih besar dengan dimensi yang lebih pendek, solenoida akan dibentuk menjadi lebih dari satu lapis lilitan. Jika sebuah bahan yang bersifat feromagnetik diletakkan ditengah-tengah dari solenoida, maka bahan tersebut akan berubah menjadi magnet buatan.
2.5 Kapasitor
Kapasitor adalah sebuah peralatan listrik yang terdiri atas dua buah elektroda yang terpisah oleh sebuah bahan dielektrik yang fungsinya adalah untuk menyimpan muatan listrik pada elektroda.[8]. Besar kapasitansi sebuah kapasitor ditentukan berdasarkan bahan dielektrik, luas penampang elektroda dan jarak antar elektroda. Adapun persamaan kapasitansi kapasitor dapat dilihat pada Persamaan 2.5 berikut :
𝑐 = 𝜀
𝐴𝑑
= 𝜀
𝑜𝜀
𝑟𝐴𝑑 2.5
Dimana :
C : Kapasitansi kapasitor εr : Permitivitas relatif
ε0 : Permitivitas Ruang hampa
A : Luas penampang elektroda d : Jarak antar elektroda
Sedangkan untuk energi yang dapat disimpan oleh sebuah kapasitor ditentukan pada Persamaan 2.6 berikut.
𝑊 =
12
𝐶 𝑉
2 2.6Dimana :
W : Energi yang tersimpan pada kapasitor C : Kapasitansi kapasitor
V : Tegangan pada kapasitor
Adapun bentuk dari kapasitor dapat dilihat pada Gambar 2.3 berikut.
Gambar 2. 3 Kapasitor
Sebuah kapsitor memiliki banyak fungsi tergantung dengan kebutuhan yang diperlukan, pada penelitian ini kapasitor akan digunakan untuk menyimpan muatan sebelum dialirkan ke solenoida, disini kapasitor berguna sebagai penghasil tegangan impuls. Adapun rating kapasitor yang digunakan dalam pengujian ini adalah dengan kapasitas tegangan 450 V dan kapasitansi 4700 uF.
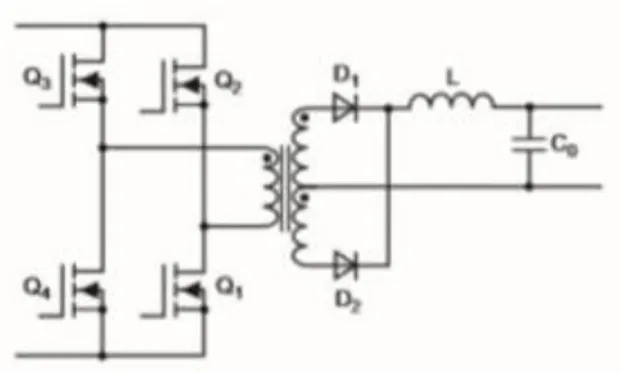
2.6 DC Booster
DC Booster adalah sebuah perangkat elektronika daya yang berguna untuk menaikkan tegangan DC dengan daya yang relatif besar[2]. DC Booster memiliki keuntungan yaitu tegangan outputnya dapat bervariasi dengan mengatur sinyal PWM yang diberikan. DC Booster termasuk kedalam Isolated DC/DC Converter
karena menggunakan transformator untuk menaikkan tegangan output. Karena menggunakan transformator maka perbandingan jumlah lilitan transformator akan ikut mempengaruhi besar tegangan output dari DC Booster[9].
Adapun rangkaian dari DC Booster dapat dilihat pada Gambar 2.4 Berikut.
Gambar 2. 4 Rangkaian DC Booster
Pada penelitian ini DC Booster yang digunakan adalah DC Booster yang dapat menaikkan tegangan dari 12-450 V.
2.7 Rele Magnetik
Rele adalah sebuah perangkat yang berfungsi sebagai penghubung atau pemutus rangkaian yang dapat dikendalikan menggunakan arus yang dialirkan pada sebuah kumparan yang berada didalam rele. Prinsip kerjanya adalah ketika arus dialirkan melalui kumparan maka akan timbul medan magnet, medan magnet ini akan menarik konduktor sehingga rangkaian menjadi terhubung ataupun terbuka sesuai dengan kondisi rele yang digunakan[10].
Rele memiliki dua buah kondisi yaitu normaly close dan normaly open dimana normaly close adalah kondisi ketika dalam keadaan kumparan rele tidak dialiri oleh arus listrik maka rangkaian akan terhubung sedangkan ketika kumparan dialiri oleh arus listrik maka rangkaian akan terputus, sedangkan untuk normaly open adalah kebalikannya dimana dalam keadaan kumparan tidak dialiri oleh arus listrik maka rangkaian akan terputus dan ketika kumparan dialiri oleh arus listrik maka rangkaian akan terhubung[10].
Adapun gambar dari rele magnetik dapat dilihat pada Gambar 2.5 berikut :
Gambar 2. 5 Rele Magnetik
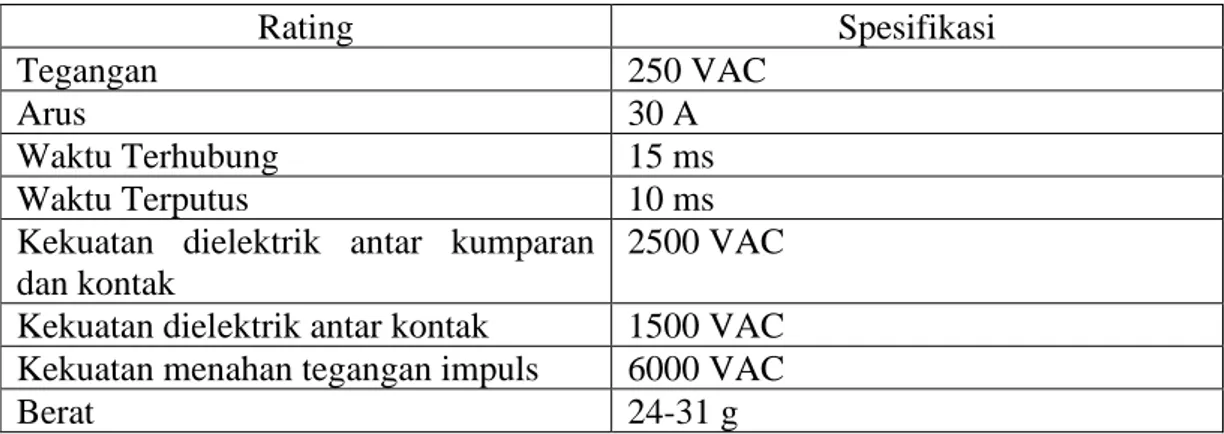
Pada penelitian ini rele yang digunakan adalah rele G8P dikarenakan rele jenis ini memiliki kemampuan dielektrik sebesar 2500 VAC antara kumparan dengan kontak dan 1500 VAC antar kontak dimana tegangan yang dipakai pada robot sepak bola beroda adalah maksimum 450 V sehingga rele ini aman untuk digunakan[11]. Adapun untuk rating lainnya dapat dilihat pada Tabel 2.2 berikut.
Tabel 2. 2 Spesifikasi Rele Omron G8P
Rating Spesifikasi
Tegangan 250 VAC
Arus 30 A
Waktu Terhubung 15 ms
Waktu Terputus 10 ms
Kekuatan dielektrik antar kumparan dan kontak
2500 VAC Kekuatan dielektrik antar kontak 1500 VAC Kekuatan menahan tegangan impuls 6000 VAC
Berat 24-31 g
Adapun rangkaian dalam dari Rele Omron G8P ditunjukkan pada Gambar 2.6 berikut.
Gambar 2. 6 Rangkaian dalam rele Omron G8P
2.8 Sistem Kendali
Sistem kendali adalah sebuah sistem yang mampu mengendalikan sebuah proses kerja dari beberapa buah peralatan. Sistem kendali dapat memiliki tiga buah proses yaitu menerima input, memproses data, dan menghasilkan output sesuai dengan hasil yang diinginkan. Sebuah sistem kendali juga diharapkan dapat mengambil sebuah keputusan dari beberapa input yang didapatkan[12].
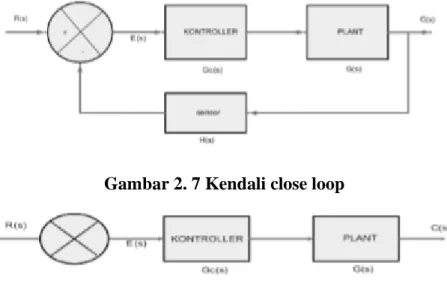
Sebuah sistem kendali memiliki dua buah sistem pengendalian yaitu berupa sistem close loop dan sistem open loop. sistem close loop adalah sebuah sistem pengendalian dimana output yang dikeluarkan ikut mempengaruhi input, sedangkan sistem open loop adalah pengendalian dimana output tidak mempengaruhi input. Adapaun gambar dari sistem close loop dan open loop ditunjukkan pada Gambar 2.7 dan 2.8 berikut[12].
Gambar 2. 7 Kendali close loop
Gambar 2. 8 Kendali Open Loop
Pada penelitian kali ini sistem kendali yang digunakan adalah kendali dengan open loop karena output tidak akan mempengaruhi input. Adapun untuk pengendalian menggunakan arduino nano yang akan dihubungkan ke rangkaian pengendali rele dan juga arduino nano akan dikendalikan oleh arduino mega yang bertindak sebagai mikrokontroler master dalam memproses pegendalian robot secara keseluruhan yang salah satunya adalah mengendalikan arduino nano pada sistem kendali penendang
2.9 Arduino
Arduino adalah sebuah papan mikrokontroler yang dibuat menggunakan mikrokontroler Atmega, ada pun tipe Atmega yang digunakan berbeda berdasar- kan jenis arduino yang ada, sebagai contoh untuk arduino nano menggunakan ATmega 168 dan arduino mega menggunakan ATmega2560[10].
Pada penelitian kali ini jenis arduino yang digunakan adalah arduino nano yang akan bertindak sebagai pengendali penendang yang secara langsung terhubung ke rangkaian pengendali rele dan juga menggunakan arduino mega yang bertindak sebagai pemberi perintah dan informasi kepada arduino nano tentang kapan harus menendang dan harus seberapa kuat robot dalam menendang.
Penggunaan dua buah mikrokontroller dilakukan dikarenakan oleh beberapa hal yaitu, Arduino mega bertindak sebagai master dari robot dan menerima banyak pembacaan sekaligus memberi perintah terhadap banyak sensor atau aktuator lain, terutama saat membaca data dari kamera yang dilakukan secara realtime, apabila penendang dikontrol secara langsung oleh arduino mega maka akan menyebabkan ketidakakuratan dalam pengendalian. Pada program ardunio mega juga terdapat beberapa program delay yang dapat menyebabkan pengendalian kekuatan tendangan tidak akurat, untuk itu diperlukan sebuah mikrokontroler lain yang berperan khusus untuk mengatur pengendalian tendangan.
Adapun spesifikasi dari kedua arduino ini adalah sebagai berikut : 1. Arduino Nano
• Arduino nano memiliki total 22 pin out yang terdiri atas 14 buah pin I/O digital dan 8 buah pin input analog.
• Arduino nano dapat bekerja pada nilai tegangan 5V DC dan dapat mengeluarkan nilai tegangan sebesar 5 V atau 3.3 V
• Untuk mengupload program dari laptop/komputer ke arduino nano menggunakan kabel mini USB
• Ukuran arduino nano jauh lebih kecil dibandingkan arduino mega
Adapun bentuk dari arduino nano ditunjukkan pada Gambar 2.9 berikut :
Gambar 2. 9 Arduino Nano 2. Arduino Mega
• Arduino mega memiliki total 70 pin out yang terdiri atas 54 buah pin I/O digital dan 16 buah pin input analog.
• Arduino nano dapat bekerja pada nilai tegangan 5V DC dan dapat mengeluarkan nilai tegangan sebesar 5 V atau 3.3 V
• Untuk mengupload program dari laptop/komputer ke arduino nano menggunakan kabel USB type B
• Ukuran arduino mega jauh lebih besar dibandingkan arduino nano Adapun bentuk dari arduino mega ditunjukkan pada Gambar 2.10 berikut:
Gambar 2. 10 Arduino Mega
BAB III
PERANCANGAN SISTEM
3.1 Alat dan Bahan Penelitian
Peralatan dan bahan-bahan yang akan digunakan dalam melakukan penelitian ini adalah sebagai berikut :
1. Alat yang digunakan
• Multimeter Digital Sanwa CD800a
• Pengukur Kecepatan Bola
• Bola Futsal
2. Perangkat Lunak yang Digunakan
• Arduino IDE
• Stopwatch Online
• Proteus 8.6
3. Bahan yang Digunakan
• Arduino Nano (1 buah)
• Arduino Mega (1 buah)
• Regulator Step Down 24 V – 12 V 3A (1 buah)
• Aki Motor (2 buah)
• Rele Omron G8P (1 buah)
• DC Booster 12 V - 450 V (1 buah)
• Dioda 6 A 1000 V (1 buah)
• Dioda 1N4007 (1 buah)
• Bipolar Junction Transistor (1 buah)
• Kapasitor 450 V 4700 uF (1 buah) 3.2 Waktu dan Tempat Penelitian
Pelaksanaan penelitian skripsi ini dilakukan di Sekretariat UKM Robotik Universitas Sumatera Utara. Waktu pelaksanaan penelitian dilakukan dari Februari 2020 dan dperkirakan akan selesai hingga akhir bulan Mei 2020.
3.3 Tahap Proses Perancangan Alat
Adapun tahap-tahapan dalam perancangan alat adalah sebagai berikut.
• Studi Literatur
Tahapan ini meliputi pencarian informasi mengenai KRSBI, Sistem penendang pada KRSBI,dan pengendalian sistem penendang solenoida, dilakukan degan cara membaca buku, jurnal-jurnal dan berdiskusi
• Penentuan Alat dan Bahan
Penentuan alat dan bahan ditentukan berdasarkan hasil dari studi literatur dan juga melihat kodisi robot sepak bola Universitas Sumatera Utara yag dijadikan sebagai objek pengujian. Alat dan bahan dipilih dengan tepat agar tidak terjadi kerusakan ataupun kesalahan fungsi dari sistem kendali yang akan dibangun
• Perancangan Rangkaian Elektronik
Perancangan Rangkaian Elektronika dilakukan setelah menentukan semua bahan yang akan digunakan dalam membuat sistem kendali sehingga dapat diketahui dimana saja komponen yang diperlukan akan diletakkan dan juga dapat memberikan supply yang cukup sesuai dengan kebutuhan masing-masing komponen.
• Pengujian dan Pengambilan Data
Pengujian dan Pengambilan data baru bisa dilakukan setelah rangkaian elektronika selesai dibangun dan juga semua kebutuhan untuk pengambilan data sudah terpenuhi. Adapun data yang akan diambil adalah data durasi pengisia kapasitor dan juga kecepatan bola hasil tendangan
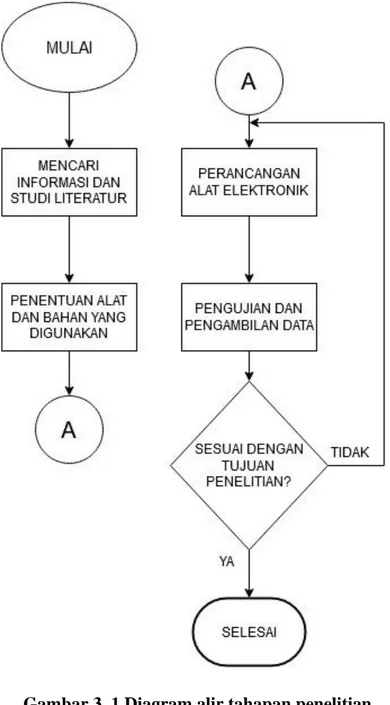
Adapun tahapan penelitian yang akan dilakukan diperlihatkan pada diagram alir yang ditunjukkan pada Gambar 3.1 berikut :
Gambar 3. 1 Diagram alir tahapan penelitian
3.4 Prosedur Pengujian dan Pengambilan Data
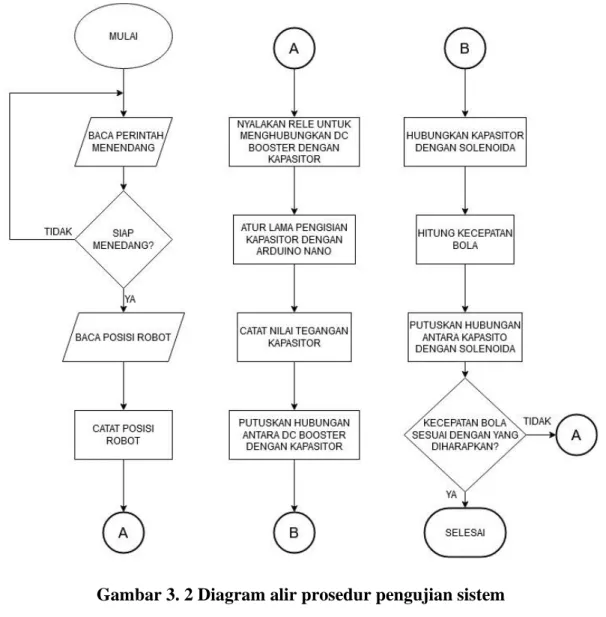
Adapun prosedur pengujian sistem sampai pengambilan data ditunjukkan pada diagram alir seperti pada Gambar 3.2 berikut.
Gambar 3. 2 Diagram alir prosedur pengujian sistem Adapun prosedur pengujian ditunjukkan pada poin – poin berikut :
1. Ardunio nano akan membaca perintah dari arduino mega apakah robot sudah siap menendang?
2. Jika arduino mega sudah memerintahkan untuk menendang maka arduino nano akan meminta data posisi robot pada arduino mega
3. Setelah posisi robot didapatkan maka arduino nano akan memerintahkan rele untuk menghubungkan antara DC BOOSTER dengan kapasitor sehingga kapasitor akan terisi.
4. Arduino nano akan memberi tundaan waktu penyalaan rele saat mengisi kapasitor.
5. Catat nilai tegangan kapasitor 6. Catat durasi pengisian kapasitor
7. Setelah waktu tundaan selesai maka arduino nano akan memerintahkan rele untuk memutus hubungan antara DC BOOSTER dengan kapasitor 8. Lalu arduino nano akan memrintahkan rele untuk menghubungkan
kapasitor dengan solenoida
9. Ketika solenoida terhubung dengan kapasitor maka bola akan tertendang dan kecepatan bola akan diukur lalu dicatat
10. Cek apakah kecepatan bola sudah sesuai dengan yang diharapkan
11. Jika belum maka balik lagi ke prosedur ke-4 dengan waktu tundaan yang berbeda
12. Jika sudah maka percobaan selesai.
3.5 Perancangan Alat Kendali
Rancagan umum yang terdapat pada robot sepak bola beroda dapat ditunjukkan melalui blok diagram pada Gambar 3.3 berikut.
Gambar 3. 3 Blok diagram rancangan umum robot sepak bola
A B
Pada rancangan ini arduino mega akan berperan sebagai mikrokontroler master yang terhubung dengan seluruh mikrokontroler slave dimana arduino mega akan berperan sebagai pengambil keputusan berdasarkan input yang didapatkan dari blok bagian A dan mengirimkan perintah sebagai output ke blok bagian B.
Salah satu keputusan yang akan diberikan oleh arduino mega adalah perintah menendang kepada arduino nano yang terhubung secara langsung ke rele magnetik yang mengatur penendang solenoida, dimana perintah menendang baru akan diberikan oleh arduino mega ketika arduino mega menerima input dari sensor pendeteksi bola bahwa bola sudah berada pada robot dan sensor kompas sudah mengarahkan robot ke arah gawang lawan.
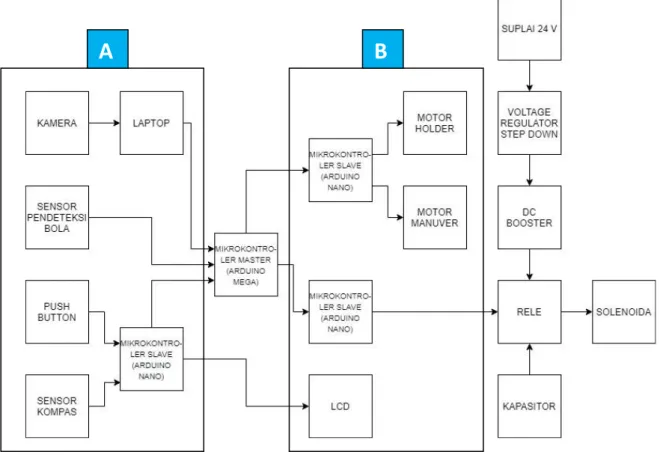
Adapun pada penelitan kali ini akan membahas perancangan dari mulai mikrokontroler master hingga ke solenoida, rancangan tersebut ditunjukkan melalui blok diagram pada Gambar 3.4 berikut.
Gambar 3. 4 Blok diagram
Dua buah aki 12 V yang dihubungkan secara seri akan menghasilkan tegangan 24 V yang nantinya akan dimasukkan ke dalam input dari Voltage Regulator Step Down sehingga tegangan keluaran dari regulator akan menjadi 12 V, hal ini dilakukan karena Voltage Regulator Step Down memiliki pembatas arus yaitu sebesar 10 ampere sehingga tidak muncul arus lebih pada saat pengisian kapasitor, tujuan lainnya dihubungkan ke Voltage Regulator Step Down terlebih dahulu adalah agar drop tegangan yang dirasakan oleh kedua aki sama besar atau keduanya akan terus memiliki nilai tegangan yang sama, hal ini diharapkan dapat mencegah aki dalam kerusakan.
Tegangan kelauaran Voltage Regulator Step Down akan dihubungkan ke DC Booster yang nantinya akan menaikkan tegangan sampai maksimum 450 V.
Rele akan menjadi saklar antara DC Booster dengan kapasitor pada hubungan Normaly Open, Rele juga akan menjadi saklar antara kapasitor dan solenoida pada hubungan Normaly Close , yang artinya DC Booster dan solenoida tidak terhubung secara langsung.
Proses pengendalian rele dari open ke close dan sebaliknya dilakukan oleh arduino nano melalui satu buah pin digital dan satu buah pin Ground yang terhubung pada rangkaian pengendali rele. Adapun yang memerintahkan arduino nano untuk mengendalikan rele adalah arduino mega yang bertindak sebagai Master, proses komunikasi antara arduino nano dan arduino mega berlangsung menggunakan komunikasi serial dengan memanfaatkan dua buah pin digital pada kedua mikrokontrolernya.
3.6 Perancangan Sistem
Adapun rangkaian alat yang akan dibangun ditunjukkan pada Gambar 3.5 berikut.
Gambar 3. 5 Rangkaian alat
Rangkaian ini adalah rangkaian alat penendang solenoida secara keseluruhan yang terdiiri dari rangkaian pengendali dan rangkaian daya. Pada rangkaian ini dapat dilihat hubungan antara pengendali yaitu arduino nano, arduino mega, dan pengendali rele dimana arduino nano akan berperan untuk memberikan sinyal tegangan sebesar 5 V ke rangkaian pengendali rele untuk selanjutnya mengatur rele dalam menghubungkan antara kapasitor dan solenoida dan juga kapasitor dengan DC BOOSTER.
3.7 Perancangan Rangkaian Pengendali
Rangkaian pengendali adalah rangkaian yang melibatkan komponen pengendali dan kompenen yang dikendalikan. Adapun komponen pengendali adalah arduino nano dan arduino mega dimana arduino nano akan menggnakan pin digital 2 dan 3 yang akan dihubungkan ke pin digital 2 dan 3 pada aduino mega sebagai media komunikasi serial, Arduino nano juga akan dihubungkan ke rangkaian pengendali dari rele menggunakan sebah pin digital yaitu pin 8 dan sebuah pin Ground.
Adapun rangkaian pengendali penendang solenoida ditunjukkan pada Gambar 3.6 berikut.
Gambar 3. 6 Rangkaian Pengendali Penendang Solenoida
3.8 Perancangan Rangkaian Pengendali Rele
Rele yang digunakan adalah Rele Omron G8P dimana bagian coilnya baru dapat aktif jika diberi tegangan 12 V, sedangkan arduino nano hanya mampu memberi tegangan 5 V sehingga dibutuhkan rangkaian pengendali lagi untuk dapat mengaktifkan rele.
Untuk membuat rangkaian pengendali dibutuhkan sebuah BJT, sebuah dioda, dan sebuah sumber tegangan 12 V. BJT akan berfungsi sebagai saklar yang akan menghubungkan coil dengan suplay tegangan 12 V sedangkan yang akan mengatur BJT membuka dan menutup adalah arduino nano dikarenakan BJT dapat aktif/konduksi saat diberi tegangan > 0.7 V.
Adapun dioda akan digunakan sebagai dioda freewheeling untuk proteksi pada rangkaian guna menghilangkan energi yang tersimpan pada coil lebih cepat.
Dioda akan dihubungkan secara paralel dengan coil sehingga energi yang tersimpan pada coil akan berputar-putar antara coil dan dioda.
Adapun rangkaian pengendali rele ditunjukkan pada Gambar 3.7 berikut.
Gambar 3. 7 Rangkaian Pengendali Rele
3.9 Perancangan Rangkaian Pengujian Pengisian Kapasitor
Rangkaian ini dibuat untuk mempemudah dalam pengambilan data saat ingin menghitung durasi yang dibutuhkan kapasitor saat pengisian tegangan.
Untuk rangkaian pengendalinya pin VCC dan Ground pada arduino nano akan dihubungkan ke rangkaian pengendali rele, pin VCC akan terlebih dahulu dihubungkan melalui sebuah saklar yang nantinya saklar yang akan menentukan pengendalian rele
Adapun rangkaian pengujian durasi pengisian kapasitor ditunjukkan pada Gambar 3.8 berikut.
Gambar 3. 8 Rangkaian Pengujian Pengisian Kapasitor
3.10 Perancangan Rangkaian Pengujian Kecepatan
Rangkaian ini dibuat untuk mempemudah dalam pengambilan data saat ingin mengukur kecepatan bola pada setiap jenis tedangan ataupun pada seiap level tegangan kapasitor. Adapun rangkaian pengujian kecepatan bola memiliki bentuk rangkaian yang sama dengan rangkaian pengujian pengisian kapasitor.
Namun yang berbeda adalah output dari DC BOOSTER akan dinaikkan secara manual dengan cara memutar potensio yang ada pada DC BOOSTER sehingga bisa didapatkan nilai tegangan yang akurat saat pengujian kecepatan tendangan, yang mana nilai tegangan yang akan diuji kecepatannya berkisar antara 50 V – 300 V dengan kenaikan tegangan tiap 50 V.
BAB IV
PENGUJIAN DAN ANALISIS
Setelah sistem dirancang sudah dapat direalisakin maka dipelukan pegujian apakah alat yang dirancang sudah memenuhi tujuan dari penelitian yang diharapkan. Pengujian ini meliputi pengujian perangkat keras, pengujian keberhasilan komunikasi dan pengendalian penendang.
4.1 Perancangan Sistem Kendali
Percangan yang pertama kali dibuat adalah rangkaian pengendali rele yang terdiri atas rele magnetik Omron G8P, satu buah resistor 10 k Ohm, satu buah dioda dan satu buah BJT. Adapun rancangan pengendali rele yang berhasil dibangun ditunjukkan pada Gambar 4.1 berikut.
Gambar 4. 1 Pengendali rele
Perancangan selanjutnya adalah perancangan keseluruhan alat yang disesuaikan dengan rangkaian yang telah dibuat sebelumnya seperti pada Gambar 3.5. Adapun rancangan alat yang berhasil dibangun ditunjukkan pada Gambar 4.2 berikut.
Gambar 4. 2 Pengendali penendang solenoida
4.2 Pengujian Durasi Pengisian Kapasitor
Pada pengujian ini akan mengukur durasi yang dibutuhkan oleh sebuah kapasitor dengan kapasitansi 4700 uF untuk terisi dari mulai tegangan 0 – 450 V dengan kelipatan nilai tegangan yang akan di uji adalah 50 V. Tujuan dari pengujian ini adalah untuk mendapatkan durasi pengisian kapasitor yang nantinya akan dimasukkan ke dalam program arduino nano sehingga arduino nano dapat mengatur berapa lama rele harus menghubungkan kapasitor dengan DC BOOSTER yang tergantung pada kondisi tegangan yang diperintahkan oleh arduino mega.
Dalam pengujian ini membutuhkan sebuah stopwatch untuk menghitung waktu dan juga sebuah multimeter untuk mengukur tegangan pada kapasitor, adapun stopwatch yang digunakan adalah stopwatch online pada laman www.online-stopwatch.com/ dan multimeter yang digunakan adalah Multimeter Digital Sanwa CD800a. Adapun data yang didapatkan dari pengujian ini seperti yang ditunjukkan pada Tabel 4.1 berikut.
Tabel 4. 1 Data Hasil Pengujian Durasi Pengisian Kapasitor
NO Tegangan (V) Waktu (s)
1 0 0
2 90 1.7
3 104 2.2
4 147 3
5 170 3.6
6 192 4.4
7 214 4.9
8 236 5.5
9 246 5.8
10 262 6.3
11 294 7.4
Pada tabel 4.1 tidak terdapat durasi pengisian kapasitor pada nilai tegangan antara 0 – 90 V hal ini dikarenakan multimeter yang digunakan tidak dapat mengukur nilai perubahan tegangan dengan cepat, sehingga nilai tegangan yang pertama kali ditampilkan adalah 90 V.
Adapun data yang didapat apabila ditampilkan ke dalam grafik akan ditunjukkan pada Gambar 4.3 berikut.
Gambar 4. 3 Grafik V vs t
4.3 Pengujian Kecepatan Tendangan
Pada pengujian ini akan mengukur kecepatan bola setelah bola ditendang- kan, adapun tendangan yang diuji bergantung kepada nilai tegangan pada kapasitor yaitu mulai dari 0 – 450 V dengan kelipatan tegangan tiap 50 V . Adapun data hasil pengujian tendangan ditunjukkan pada Tabel 4.2 berikut.
Tabel 4. 2 Pengujian Kecepatan Tendangan N
O Tegangan Kecepatan (m/s)
v1 v2 v3 v4 v5 v rata-rata
1 0 0 0 0 0 0 0
2 50 0 0 0 0 0 0
3 100 1.22 1.31 1.49 1.36 1.85 1.44
4 150 3.82 4.52 5.64 4.54 4.75 4.65
5 200 7.69 6.28 7.15 6.42 8.01 7.11
6 250 9.70 9.90 8.24 9.82 10.96 9.72
7 300 13.83 11.07 11.86 12.56 13.27 12.51
0 50 100 150 200 250 300 350
0 1,7 2,2 3 3,6 4,4 4,9 5,5 6,3 7,4
V vs t
Pada tabel 4.2 dapat dilihat bahwa untuk nilai tegangan yang sama memiliki hasil kecepatan yang berbeda hal ini dipengaruhi oleh penempatan bola pada robot yang tidak persis sama dan juga posisi holder memegang bola yang tidak selalu sama, serta beberapa aspek lain yang belum diketahui sehingga diperlukannya penelitian lebih lanjut dikemudian hari mengenai hal tersebut.
Pengambilan data kecepatan dilakukan sebanyak 5 kali untuk setiap nilai tegangannya dikarenakan kondisi mekanik robot yang belum sempurna, dimana pada saat pengujian tuas pada kicker patah yang menyebabkan pengambilan data tidak dapat dilanjutkan, apabila tuas diganti dengan yang baru maka data yang sebelumnya akan berbeda dengan data yang akan diambil kembali.
Dari data pada Tabel 4.2 maka dapat pula dihitung jumlah energi yang hilang pada setiap level tegangan berdasarkan persamaan berikut.
𝐸𝑃𝑜𝑡𝑒𝑛𝑠𝑖𝑎𝑙 = 𝐸𝑙𝑜𝑠𝑠+ 𝐸𝑘𝑖𝑛𝑒𝑡𝑖𝑘 Dimana :
EPotensial = Energi yang tersimpan pada kapasitor Eloss = Energi yang hilang
Ekinetik = Energi gerak bola
𝐸𝑙𝑜𝑠𝑠 = 𝐸𝑃𝑜𝑡𝑒𝑛𝑠𝑖𝑎𝑙− 𝐸𝑘𝑖𝑛𝑒𝑡𝑖𝑘
𝐸𝑙𝑜𝑠𝑠 =1
2𝐶 𝑉2− (1
2𝑚 𝑣2+1 2𝐼 𝜔2) 𝐸𝑙𝑜𝑠𝑠 =1
2𝐶 𝑉2− (1
2𝑚 𝑣2+1 2𝑥2
3 𝑚𝑅2(𝑣 𝑅)2) 𝐸𝑙𝑜𝑠𝑠 =1
2𝐶 𝑉2− (1
2𝑚 𝑣2+1
3 𝑚𝑣2) 𝐸𝑙𝑜𝑠𝑠 =1
2𝐶 𝑉2−5 6𝑚𝑣2
Pada perhitungan ini nilai C adalah 4700 x 10-6 F, m adalah 0.4 Kg, dan v menggunakan nilai kecepatan rata-ata.
Energi yang hilang pada nilai tegangan 0 V:
𝐸𝑙𝑜𝑠𝑠 =1
24700𝑥10−6 (0)2−5
60.4 (0)2 𝐸𝑙𝑜𝑠𝑠 = 0 𝐽
Energi yang hilang pada nilai tegangan 50 V :
𝐸𝑙𝑜𝑠𝑠 =1
24700𝑥10−6 (50)2− 5
60.4 (0)2 𝐸𝑙𝑜𝑠𝑠 = 5.8 𝐽 Energi yang hilang pada nilai tegangan 100 V :
𝐸𝑙𝑜𝑠𝑠 =1
24700𝑥10−6 (100)2−5
60.4 (1.44)2 𝐸𝑙𝑜𝑠𝑠 = 23.5 𝐽 − 0.69 𝐽
𝐸𝑙𝑜𝑠𝑠 = 22.81 𝐽
Energi yang hilang pada nilai tegangan 150 V : 𝐸𝑙𝑜𝑠𝑠 =1
24700𝑥10−6 (150)2−5
60.4 (4.5)2 𝐸𝑙𝑜𝑠𝑠 = 52.87 𝐽 − 7.2𝐽
𝐸𝑙𝑜𝑠𝑠 = 45.67 𝐽
Energi yang hilang pada nilai tegangan 200 V : 𝐸𝑙𝑜𝑠𝑠 =1
24700𝑥10−6 (200)2−5
60.4 (6.4)2 𝐸𝑙𝑜𝑠𝑠 = 94 𝐽 − 16.85𝐽
𝐸𝑙𝑜𝑠𝑠 = 77.15 𝐽
Energi yang hilang pada nilai tegangan 250 V :
𝐸𝑙𝑜𝑠𝑠 =1
24700𝑥10−6 (250)2−5
60.4 (9.7)2 𝐸𝑙𝑜𝑠𝑠 = 146.8 𝐽 − 31.49 𝐽
𝐸𝑙𝑜𝑠𝑠 = 115.31 𝐽 Energi yang hilang pada nilai tegangan 300 V :
𝐸𝑙𝑜𝑠𝑠 =1
24700𝑥10−6 (300)2−5
60.4 (12.51)2 𝐸𝑙𝑜𝑠𝑠 = 211.5 𝐽 − 52.16 𝐽
𝐸𝑙𝑜𝑠𝑠 = 159.33 𝐽
Adapun besar energi yang hilang terhadap nilai tegangan yang diberikan pada kapasitor dapat dilihat pada Tabel 4.3 berikut.
Tabel 4. 3 Data energi yang hilang terhadap nilai tegangan pada kapasitor No Tegangan Eloss (Joule)
1 0 0
2 50 5.8
3 100 22.81
4 150 45.67
5 200 77.15
6 250 115.37
7 300 159.33
Dari data dapat dilihat bahwa semakin bertambahnya nilai tegangan maka energi yang hilang juga semakin bertambah, adapun yang menyebabkan hilangnya energi selama proses perubahan energi listrik menjadi energi gerak adalah medan magnet bocor, momentum / tumbukan yang tidak lenting sempurna, getaran, panas, dan aspek-aspek lain yang perlu untuk dihitung pada penelitian selanjutnya.
Adapun besar energi yang hilang terhadap nilai tegangan yang diberikan pada kapasitor dapat dilihat pada Gambar 4.4 berikut.
Gambar 4. 4 Grafik E loss vs V
Dari Grafik 4.4 dapat dilihat bahwa bentuk grafik melengkung yang menyerupai grafik fungsi kuadrat, maka dapat disimpulkan bahwa energi yang hilang bergantung pada nilai tegangan kuadrat.
Adapun untuk menghitung kecepatan yang dihasilkan berdasarkan tegangan yang disimpan pada kapasitor secara perhitungan dengan memasukkan faktor energi yang hilang yang didapatkan pada perhitungan sebelumnya dapat menggunakan persamaan berikut.
1
2𝐶 𝑉2− 𝐸𝑙𝑜𝑠𝑠 = (1
2𝑚 𝑣2+1 2𝐼 𝜔2) 1
2𝐶 𝑉2− 𝐸𝑙𝑜𝑠𝑠 = (1
2𝑚 𝑣2+1 2𝑥2
3 𝑚𝑅2(𝑣 𝑅)2) 1
2𝐶 𝑉2− 𝐸𝑙𝑜𝑠𝑠 = (1
2𝑚 𝑣2+1
3 𝑚𝑣2) 1
2𝐶 𝑉2− 𝐸𝑙𝑜𝑠𝑠 = 5 6𝑚𝑣2
0 20 40 60 80 100 120 140 160 180
0 50 100 150 200 250 300
E loss Vs V
𝑣 = √ 6 5𝑚 𝑥 ( 1
2 𝐶𝑉2− 𝐸𝑙𝑜𝑠𝑠
2
)
Karena C =4700 x 10-6 F dan m = 0.4 Kg, maka persamaannya akan menjadi sebagai berikut.
𝑣 = √3𝑥 ( 1
2 𝑥4700𝑥10−6𝑥𝑉2− 𝐸𝑙𝑜𝑠𝑠
2
)
Kecepatan pada tegangan 0 V
𝑣 = √3𝑥 ( 1
2 𝑥4700𝑥10−6𝑥02− 0
2
)
𝑣 = 0 𝑚/𝑠 Kecepatan pada tegangan 50 V
𝑣 = √3𝑥 ( 1
2 𝑥4700𝑥10−6𝑥502− 5.8
2
)
𝑣 = 0.47 𝑚/𝑠 Kecepatan pada tegangan 100 V
𝑣 = √3𝑥 ( 1
2 𝑥4700𝑥10−6𝑥1002− 22.81
2
)
𝑣 = 1.43 𝑚/𝑠 Kecepatan pada tegangan 150 V
𝑣 = √3𝑥 ( 1
2 𝑥4700𝑥10−6𝑥1502− 45.67
2
)
𝑣 = 4.64 𝑚/𝑠
Kecepatan pada tegangan 200 V
𝑣 = √3𝑥 ( 1
2 𝑥4700𝑥10−6𝑥2002− 77.15
2
)
𝑣 = 7.10 𝑚/𝑠 Kecepatan pada tegangan 250 V
𝑣 = √3𝑥 ( 1
2 𝑥4700𝑥10−6𝑥𝑉2− 𝐸𝑙𝑜𝑠𝑠
2
)
𝑣 = 9.72 𝑚/𝑠 Kecepatan pada tegangan 300 V
𝑣 = √3𝑥 ( 1
2 𝑥4700𝑥10−6𝑥3002− 159.33
2
)
𝑣 = 12.51 𝑚/𝑠
Adapun data nilai kecepatan terhadap tegangan secara perhitungan dapat dilihat pada Tabel 4.4 berikut.
Tabel 4. 4 Nilai kecepatan secara perhitungan No Tegangan Kecepatan (m/s)
1 0 0
2 50 0.47
3 100 1.43
4 150 4.64
5 200 7.10
6 250 9.72
7 300 12.51
Dari Tabel 4.4 terlihat bahwa semakin besar nilai tegangan maka kecepatan bola juga akan semakin besar hal ini sejalan dengan kecepatan bola yang diukur sebelumnya pada Tabel 4.2 dimana kecepatan rata-rata pengukuran semakin membesar sesuai dengan meningkatnya level tegangan.
Pada Tabel 4.4 dapat dilihat pula bahwa pada nilai tegangan 50 V bola sudah mulai bergerak dengan kecepatan 0.47 m/s sedangkan secara praktik bola belum bergerak pada tegangan 50 V, karena adanya ketidak-sesuaian data antara perhitungan dengan pengukuran maka diperlukan untuk menghitung persentase kesalahan.
Adapun persentase kesalahan kecepatan secara perhitungan dengan kecepatan secara percobaan dapat dihitung dengan persamaan berikut.
𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 = |𝑣𝑡𝑒𝑜𝑟𝑖− 𝑣𝑝𝑒𝑟𝑐𝑜𝑏𝑎𝑎𝑛
𝑣𝑡𝑒𝑜𝑟𝑖 | 𝑥 100 %
Untuk nilai 𝑣𝑝𝑒𝑟𝑐𝑜𝑏𝑎𝑎𝑛 pada perhitungan ini akan digunakan nilai kecepatan setiap percobaan yang dilakukan
Untuk Tegangan 0 V :
Karena nilai tegangan 𝑣𝑡𝑒𝑜𝑟𝑖 dan 𝑣𝑝𝑒𝑟𝑐𝑜𝑏𝑎𝑎𝑛 adalah sama sama 0 maka 𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 = 0 %
Untuk tegangan 50 V
Karena nilai 𝑣𝑝𝑒𝑟𝑐𝑜𝑏𝑎𝑎𝑛 seluruhnya adalah 0 maka
𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 = |0.47 − 0
0.47 | 𝑥 100 % 𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 = 100 %
Untuk tegangan 100 V
𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑣1 = |1.43 − 1.22
1.43 | 𝑥 100 % 𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑣1 = 14.68 %
𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑣2 = | 1.43 − 1.31
1.43 | 𝑥 100 % 𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑣2 = 8.39%
𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑣3 = |1.43 − 1.49
1.43 | 𝑥 100 % 𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑣3 = 4.19 %
𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑣4 = |1.43 − 1.36
1.43 | 𝑥 100 % 𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑣4 = 4.89 %
𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑣5 = |1.43 − 1.85
1.43 | 𝑥 100 % 𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑣5 = 29.37 %
Untuk persentase kesalahan rata-rata adalah
𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑟𝑎𝑡𝑎 − 𝑟𝑎𝑡𝑎 = 𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 (𝑣1 + 𝑣2 + 𝑣3 + 𝑣4 + 𝑣5) 5
𝑝𝑒𝑟𝑠𝑒𝑛𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑟𝑎𝑡𝑎 − 𝑟𝑎𝑡𝑎 = 14.68 % + 8.39% + 4.19% + 4.89% + 29.37%
5
𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑟𝑎𝑡𝑎 − 𝑟𝑎𝑡𝑎 = 12.30 %
Untuk tegangan 150 V
𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑣1 = |4.64 − 3.82
4.64 | 𝑥 100 % 𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑣1 = 17.67 %
𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑣2 = |4.64 − 4.52
4.64 | 𝑥 100 % 𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑣2 = 2.58 %
𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑣3 = |4.64 − 5.64
4.64 | 𝑥 100 % 𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑣3 = 21.55 %
𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑣4 = |4.64 − 4.54
4.64 | 𝑥 100 % 𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑣4 = 2.15 %
𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑣5 = |4.64 − 4.75
4.64 | 𝑥 100 % 𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑣5 = 2.37 %
Untuk persentase kesalahan rata-rata adalah
𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑟𝑎𝑡𝑎 − 𝑟𝑎𝑡𝑎 = 𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 (𝑣1 + 𝑣2 + 𝑣3 + 𝑣4 + 𝑣5) 5
𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑟𝑎𝑡𝑎 − 𝑟𝑎𝑡𝑎 = 17.67 % + 2.58 % + 21.55% + 2.15% + 2.37%
5
𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑟𝑎𝑡𝑎 − 𝑟𝑎𝑡𝑎 = 9.26 %
Untuk tegangan 200 V
𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑣1 = |7.10 − 7.69
7.10 | 𝑥 100 % 𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑣1 = 8.3 %
𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑣2 = |7.10 − 6.28
7.10 | 𝑥 100 % 𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑣2 = 11.54 %
𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑣3 = |7.10 − 7.15
7.10 |𝑥 100 % 𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑣3 = 0.7 %
𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑣4 = | 7.10 − 6.42
7.10 | 𝑥 100 % 𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑣4 = 9.5 %
𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑣5 = |7.10 − 8.01
7.10 | 𝑥 100 % 𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑣5 = 12.81 %
Untuk persentase kesalahan rata-rata adalah
𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑟𝑎𝑡𝑎 − 𝑟𝑎𝑡𝑎 = 𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 (𝑣1 + 𝑣2 + 𝑣3 + 𝑣4 + 𝑣5) 5
𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑟𝑎𝑡𝑎 − 𝑟𝑎𝑡𝑎 = 8.3 % + 11.54% + 0.7% + 9.5% + 12.81%
5
𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑟𝑎𝑡𝑎 − 𝑟𝑎𝑡𝑎 = 8.57 % Untuk tegangan 250 V
𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑣1 = |9.72 − 9.70
9.72 |𝑥 100 % 𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑣1 = 0.2 %
𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑣2 = | 9.72 − 9.90
9.72 | 𝑥 100 % 𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑣2 = 0.18 %
𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑣3 = |9.72 − 8.24
9.72 | 𝑥 100 % 𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑣3 = 15,22 %
𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑣4 = |9.72 − 9.82
9.72 | 𝑥 100 % 𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑣4 = 0.1 %
𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑣5 = |9.72 − 10.96
9.72 | 𝑥 100 % 𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑣5 = 12.75 %
Untuk persentase kesalahan rata-rata adalah
𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑟𝑎𝑡𝑎 − 𝑟𝑎𝑡𝑎 = 𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 (𝑣1 + 𝑣2 + 𝑣3 + 𝑣4 + 𝑣5) 5
𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑟𝑎𝑡𝑎 − 𝑟𝑎𝑡𝑎 = 0.2 % + 0.18% + 15.22% + 0.1% + 12.75%
5
𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑟𝑎𝑡𝑎 − 𝑟𝑎𝑡𝑎 = 5.69 %
Untuk tegangan 300 V
𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑣1 = | 12.51 − 13.83
12.51 | 𝑥 100 % 𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑣1 = 10.55 %
𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑣2 = |12.51 − 11.07
12.51 | 𝑥 100 % 𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑣2 = 11.51 %
𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑣3 = |12.51 − 11.86
12.51 | 𝑥 100 % 𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑣3 = 5.19 %
𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑣4 = |12.51 − 12.56
12.51 | 𝑥 100 % 𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑣4 = 0.39 %
𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑣5 = |12.51 − 13.27
12.51 | 𝑥 100 % 𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑣5 = 6.07 %
Untuk persentase kesalahan rata-rata adalah
𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑟𝑎𝑡𝑎 − 𝑟𝑎𝑡𝑎 = 𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 (𝑣1 + 𝑣2 + 𝑣3 + 𝑣4 + 𝑣5) 5
𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑟𝑎𝑡𝑎 − 𝑟𝑎𝑡𝑎 = 10.55% + 11.51% + 5.19% + 0.39% + 6.07%
5
𝑝𝑒𝑟𝑠𝑒𝑛 𝑘𝑒𝑠𝑎𝑙𝑎ℎ𝑎𝑛 𝑟𝑎𝑡𝑎 − 𝑟𝑎𝑡𝑎 = 6.74 %
Adapaun data persentase kesalahan apabila ditampilkan dalam bentuk tabel maka dapat dilihat pada Tabel 4.5 berikut.
Tabel 4. 5 Hasil data persentase kesalahan No Tegangan (V) Persentase kesalahan (%)
v1 v2 v3 v4 v5 Rata-rata
1 0 0 0 0 0 0 0
2 50 100 100 100 100 100 100
3 100 14.68 8.39 4.19 4.89 29.37 12.30
4 150 17.67 2.58 21.55 2.15 2.37 9.26
5 200 8.3 11.54 0.7 9.5 12.81 8.57
6 250 0.2 0.18 15.22 0.1 12.75 5.69
7 300 10.55 11.51 5.19 0.39 6.07 6.74
Persen kesalahan menunjukkan adanya ketidak-sesuaian antara kecepatan bola yang diukur secara percobaan dengan kecepatan bola secara perhitungan, meskipun faktor energi yang hilang sudah dimasukkan kedalam perhitungan, namun adanya perbedaan kecepatan yang diukur pada tiap level tegangannya menyebabkan adanya perbedaan persentase kesalahan untuk itu perlu dihitung pula rata-rata dari persentase kesalahan pada tiap level tegangannya.
Pada Tabel 4.4 dapat dilihat bahwa Pada nilai tegangan 50 V persentase kesalahan mencapai nilai 100 % dikarenakan pada tegangan tersebut penendang sama sekali belum dapat menendang bola. dari level tegangan 50 – 250 V semakin besar nilai tegangan maka rata-rata persentase kesalahan semakin kecil, namun pada nilai tegangan 300 V persentase kesalahan kembali membesar melebihi persentase kesalahan pada tegangan 250 V namun lebih kecil dari tegangan 200 V. Untuk hal ini diperlukan penelitian lebih lanjut apakah setelah nilai tegangan diatas 300 V persentase kesalahan akan kembali meningkat atau justru akan kembali menurun.